
Figures & data
Figure 1. Model of the TWSBR.
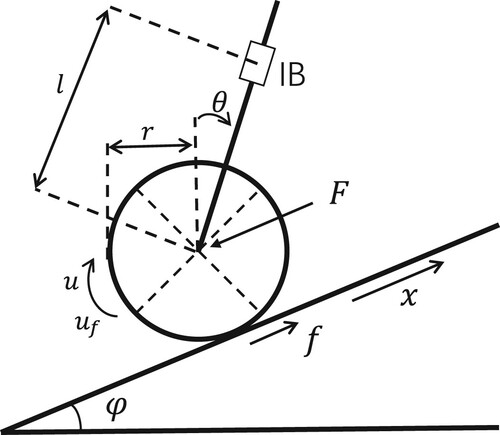
Table 1. Robot parameters.
Figure 2. Diagram of balance state.
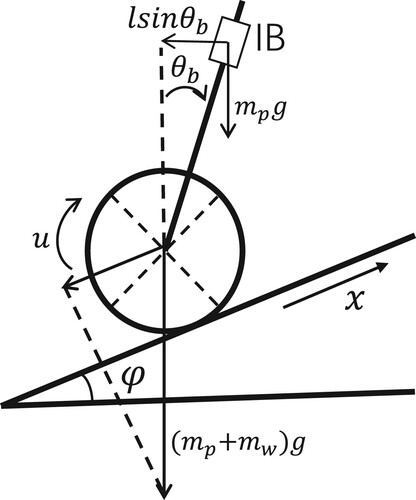
Figure 3. Schematic diagram of FFOPID controller.

Figure 4. Membership function – error signal, fractional order of error.
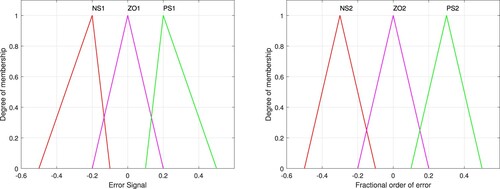
Table 2. Rule based for /
/
.
Table 3. Optimal parameters of controller.
Figure 5. When , the robot's position and balance performance on the inclined plane. (a) Position control of the robot. (b) Balance control of the robot and (c) The output of the FFOPID controller.
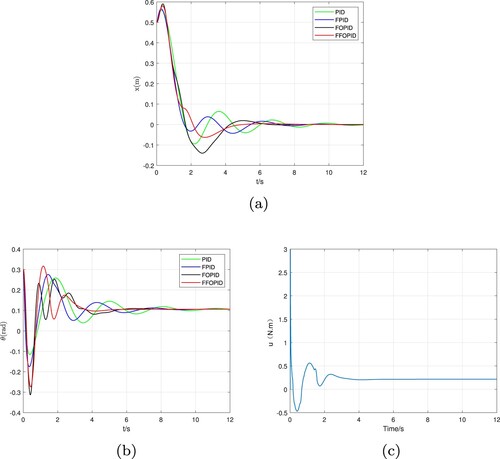
Table 4. The performance index result under the condition of .
Figure 6. When , the robot's position and balance performance on the inclined plane. (a) Position control of the robot. (b) Balance control of the robot and (c) The output of the FFOPID controller.
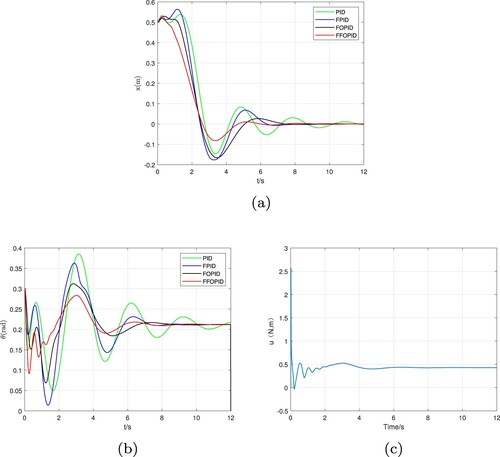
Table 5. The performance index result under the condition of .
Figure 7. After adding disturbance, the robot's position and balance performance on the inclined plane. (a)
and (b)
.
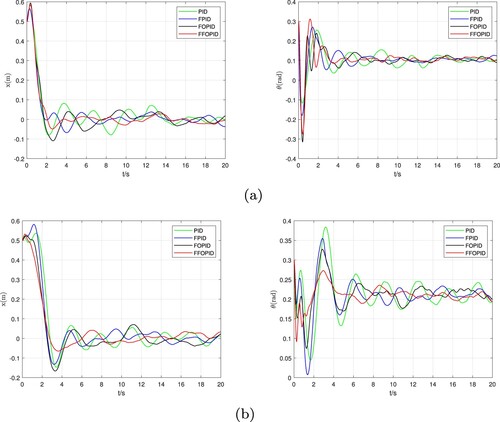
Table 6. When , performance index under the condition of
disturbance.
Table 7. When , performance index under the condition of
disturbance.
Figure 8. After adding 0.5 rad interference, the robot's position and balance performance on the inclined plane. (a) and (b)
.
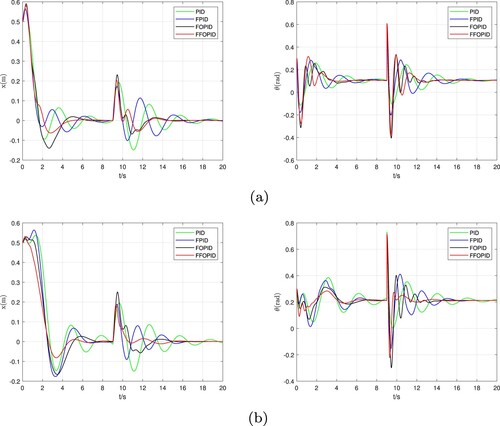
Table 8. When , performance index under the condition of 0.5 rad disturbance.
Table 9. When , performance index under the condition of 0.5 rad disturbance.
Data availability statement
The datasets generated during and/or analysed during the current study are available from the corresponding author on reasonable request.