
Figures & data
Figure 1. Overhead crane model.
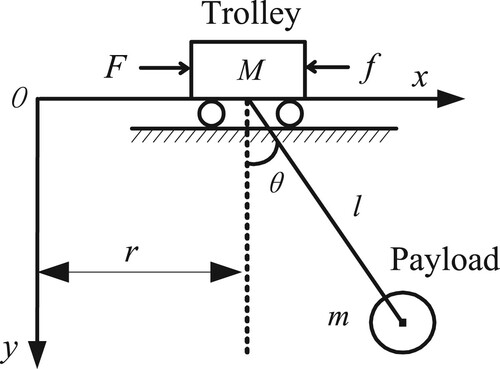
Figure 2. Principle of input shaping.
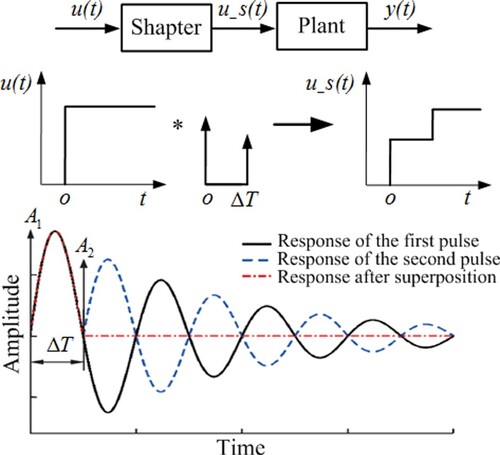
Figure 3. Position response of the trolley.
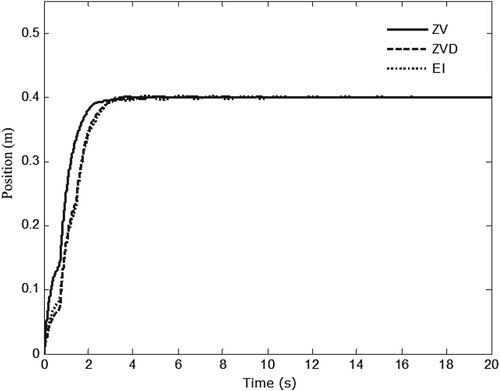
Figure 4. Swing response of the payload.
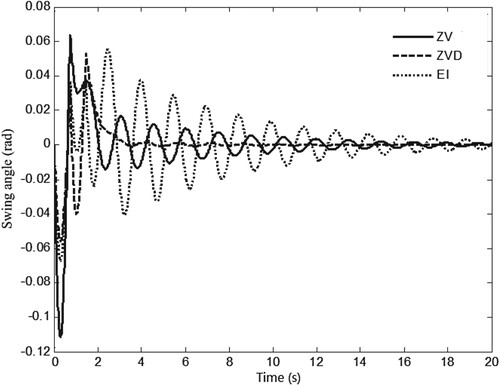
Figure 5. Structure of ZVD shaper-based PID control for the crane.
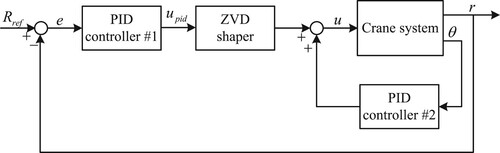
Figure 6. Position response under the different control algorithms.
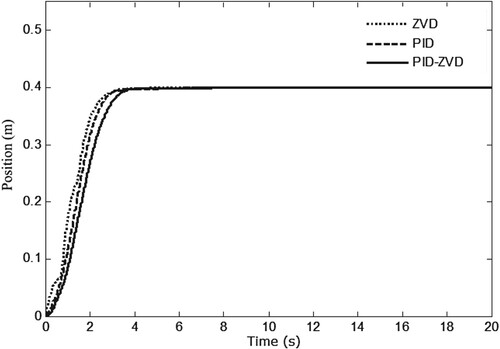
Figure 7. Swing response under the different control algorithms.
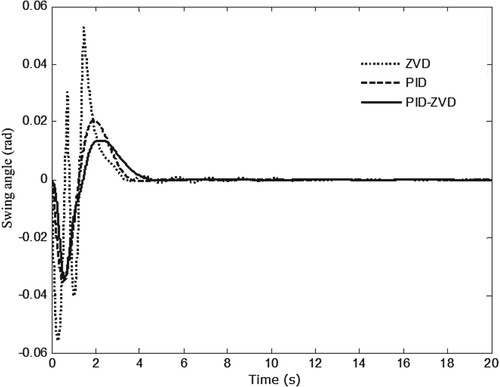
Figure 8. Structure of MPC-ZVD.
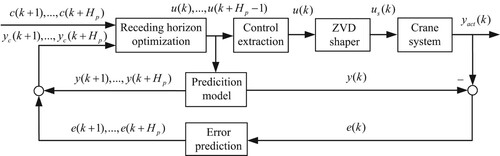
Figure 9. Position response under the MPC-ZVD algorithm.
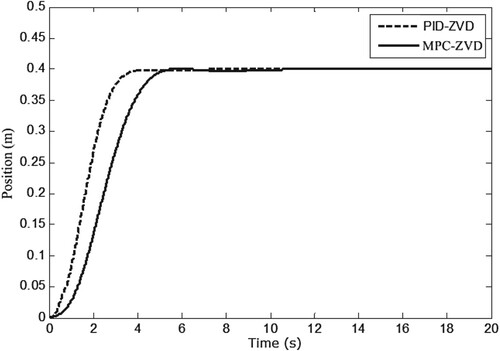
Figure 10. Swing response under the MPC-ZVD algorithm.
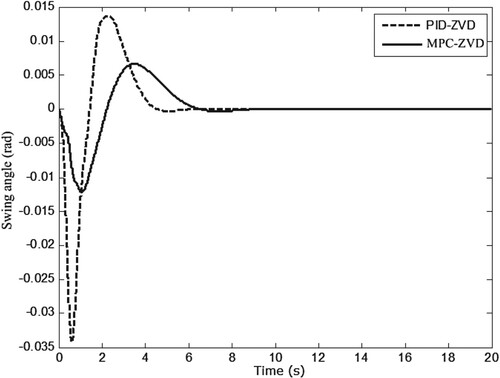
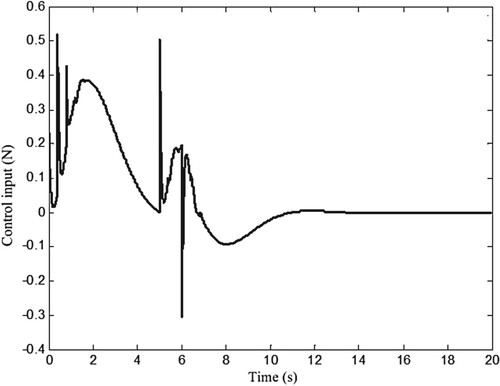
Figure 11. Control inputs under the MPC-ZVD algorithm.
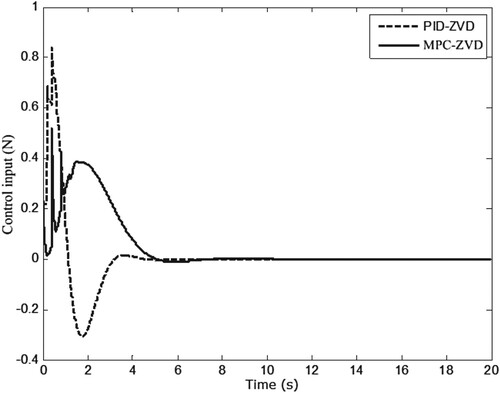
Figure 12. Position response under the MPC algorithms.
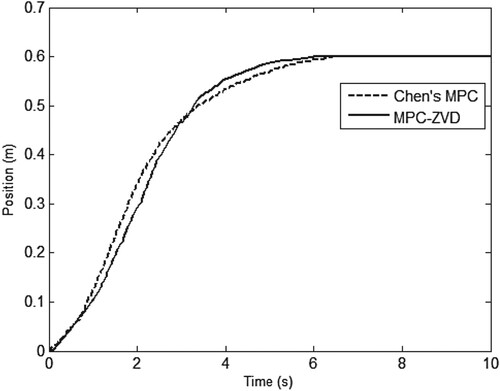
Figure 13. Swing response under the MPC algorithms.
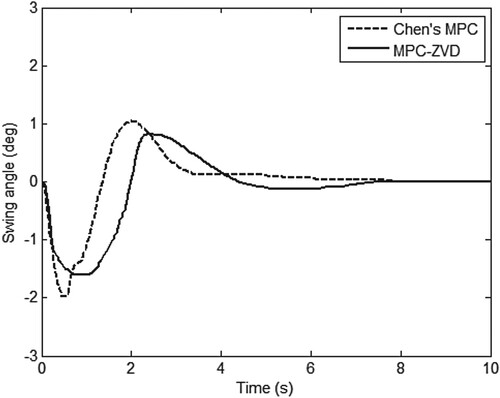
Figure 14. Control inputs under the MPC algorithms.
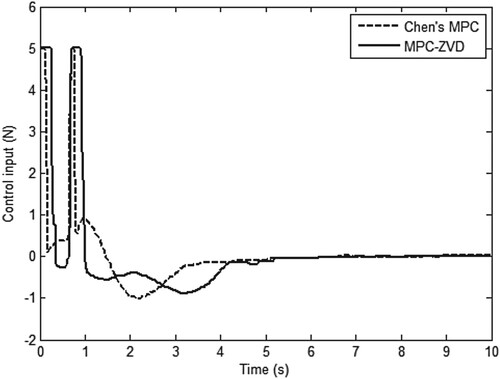
Figure 15. Position response under the MPC-ZVD algorithm considering disturbance.
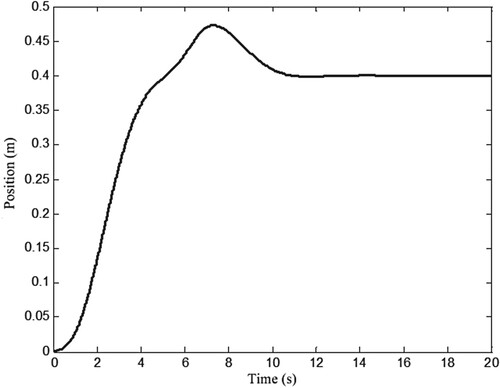
Figure 16. Swing response under the MPC-ZVD algorithm considering disturbance.
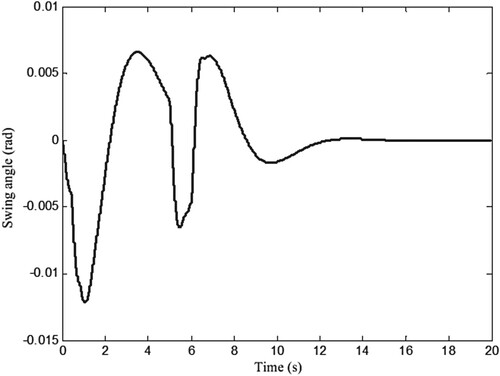
Figure 17. Control inputs under the MPC-ZVD algorithm considering disturbance.
Data availability statement
All data generated or analyzed during this study are included in this study.