
Figures & data
Figure 1 The KINARM exoskeleton robot and robotic assessment tasks. (a) The KINARM exoskeleton robot allows patients to sit and perform behavioral tasks as weight support is provided to their arms. Tasks are displayed on a horizontal virtual reality display aligned with the horizontal workspace of the arm. (b) Tasks are arranged in cognitive, motor, and sensory groups. Motor tasks: clockwise from Ball on Bar to Elbow Stretch (ND). Sensory task: Arm Position Matching. Cognitive tasks: clockwise from Spatial Span to Reverse Visually-Guided Reaching (inter-limb). Small markers: Task Scores above 1.96 indicate impairment as they are outside the 95th percentile of performance of healthy subjects. Large markers: performance within the 95th percentile of healthy controls.
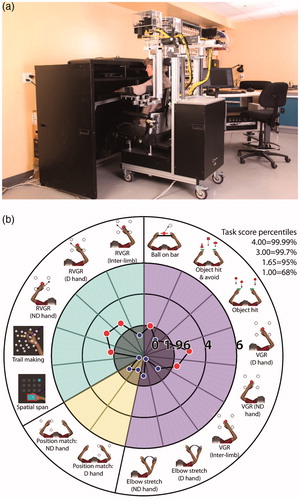
Table 1 Task descriptions.
Table 2 Individual-specific clinical and demographic data.
Table 3 Individual task scores for all participants in the study.
Figure 2 Example patient performance on robotic assessment tasks. Each row displays Task Scores for four example participants and hand paths for three tasks. Task Scores are written underneath each task and are indicated as impaired (bold) when appropriate. ‘Dom’ denotes dominant hand and ‘Non-dom’ denotes non-dominant hand.
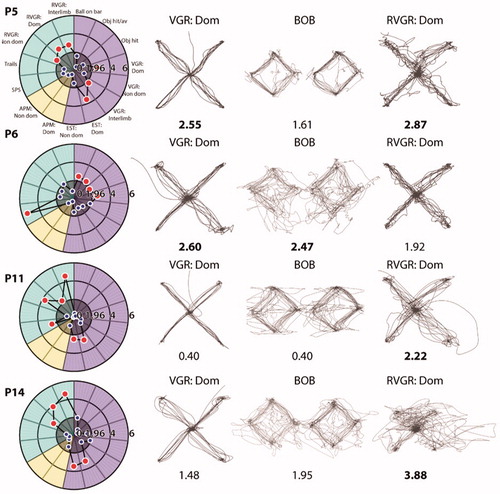
Table 4 Correlations between clinical scores and robotic tasks.
Data availability
All relevant data are included in the manuscript, figures, and tables.