
Figures & data
Figure 1. Different assembly line shapes.
Figure 2. Mixed and Mutli model assembly lines.
Table 1. Contributions of related works
Figure 3. Adopted construction phase.
Figure 4. Adopted local search phase.
Figure 5. The proposed evaluation algorithm.
Table 2. Used parameters in the hybrid reactive GRASP for all problems
Table 3. Numbers of solutions found by the hybrid Reactive GRASP for each problem
Figure 6. Variation of selection probabilities while solving problem 1.
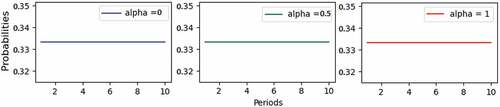
Figure 7. Variation of selection probabilities while solving problem 2.
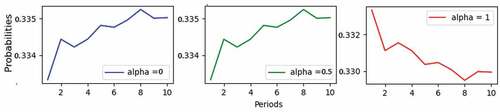
Figure 8. Variation of selection probabilities while solving problem 3.

Figure 9. Variation of selection probabilities while solving problem 4.
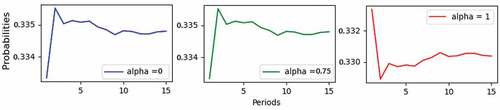
Figure 10. Variation of selection probabilities while solving problem 5.

Figure 11. Variation of selection probabilities while solving problem 6.
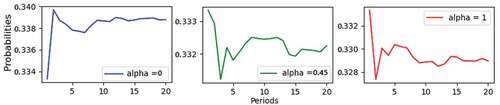
Table 4. Assignment of tasks of problem 1
Table 5. Assignment of tasks of problem 2
Table 6. Assignment of tasks of problem 3
Table 7. Assignment of tasks of problem 4
Table 8. Assignment of tasks of problem 5
Table 9. Assignment of tasks of problem 6
Figure 12. Comparisons of obtained numbers of workstations for (a) problem 1, (b) problem 2, (c) problem 3.
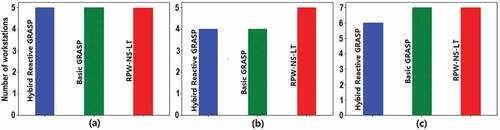
Figure 13. Comparisons of obtained numbers of workstations for (d) problem 4 (e) problem 5 (f) problem 6.
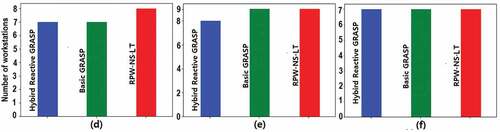
Table 10. Comparison of taken CPU time for solving problem 7 by the Hybrid Reactive GRASP and LINGO solver
Table A1. Problem 1
Table A2. Problem 2
Table A3. Problem 3
Table A4. Problem 4
Table A5. Problem 5
Table A6. Problem 6
Table A7. Problem 7
