Figures & data
Figure 1. Illustration of trips that we can modify their stop-skipping plans in two consecutive rolling horizons.
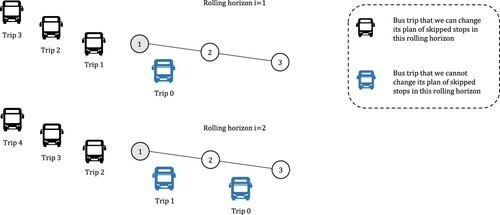
Figure 2. Required solution evaluations for a bus line with bus stops when the number of trips in the rolling horizon,
, varies. The possible computations are the computations that can be executed by the world's fastest supercomputer in 1 min.
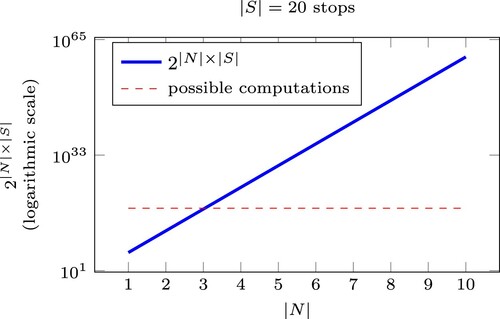
Figure 3. Required number of objective function evaluations with brute force and S-HC for rolling horizons with 1–10 trips, a bus line with 20 stops, and .
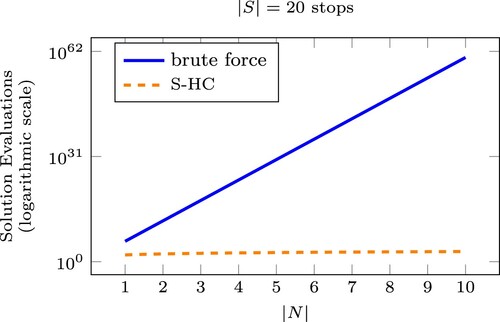
Figure 4. Topology of the toy network operating one bus line.
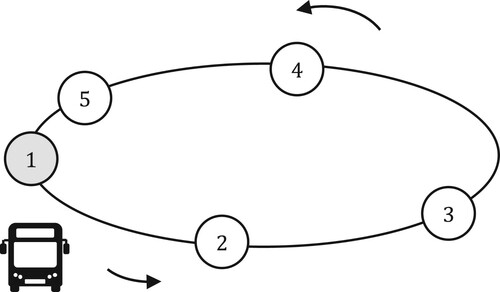
Table 1. Parameter values of the idealized scenario.
Table 2. Computational costs and optimality gap(s) when applying Brute Force (BF), S-HC and the GA in the idealized bus line for different numbers of stops.
Figure 5. Convergence of the S-HC algorithm in the case of 5 bus stops and 4 trips in the rolling horizon.
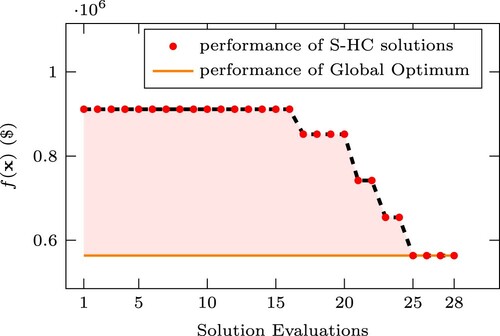
Figure 6. Computational cost when evaluating the performance of a single solution in a rolling horizon with 4 bus trips with respect to the number of stops.
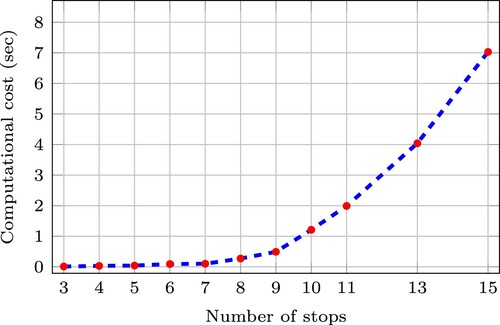
Figure 7. Stop-skipping candidates of bus line 15L in Denver.
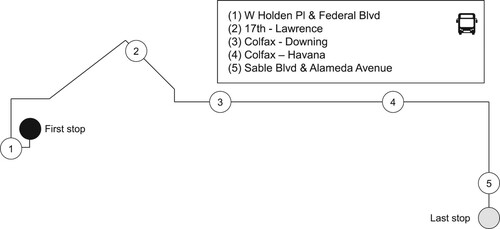
Table 3. Expected travel times,  .
.
Figure 8. Performance when applying the optimal stop-skipping solution in 1000 simulations considering , 0.3, 0.4, and 0.5, respectively.
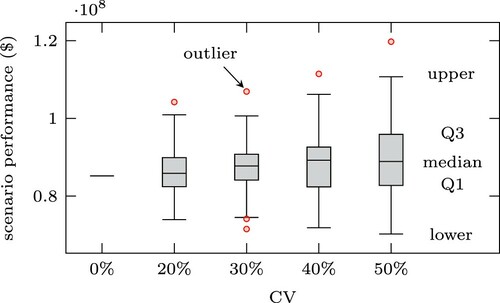
Table 4. Performance when running 1000 simulations for different travel time variation levels (in thousands).
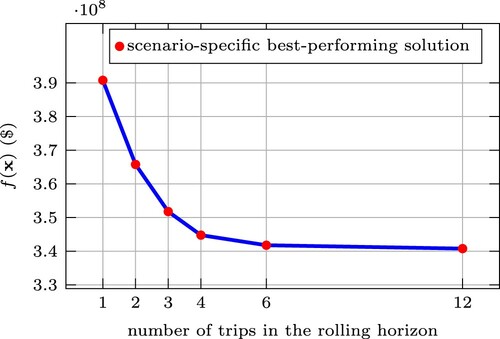
Figure 9. Performance of the stop-skipping strategy depending on the considered number of trips in a rolling horizon.