Figures & data
Figure 1. Diagram of the 4-WDDMR.
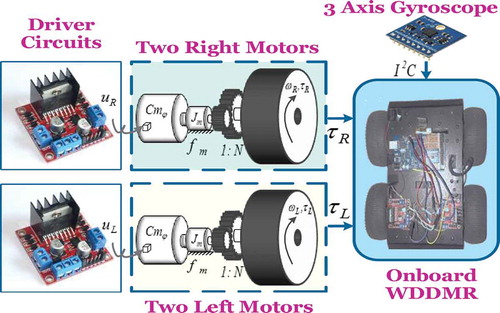
Table 1. 4-WDDMR model parameters
Figure 2. 4-WDDMR coordinates systems.
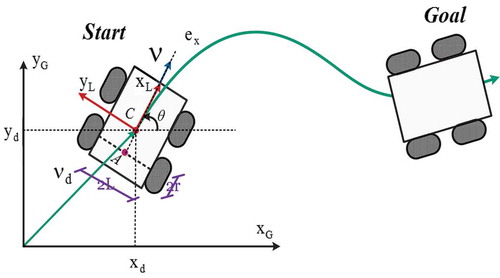
Figure 3. Block diagram of fusion sensors.
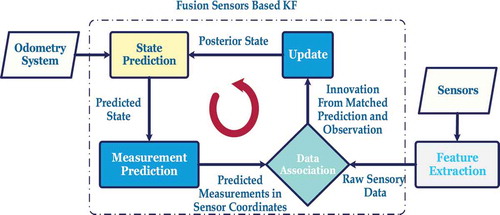
Figure 4. UKF recursive algorithm.
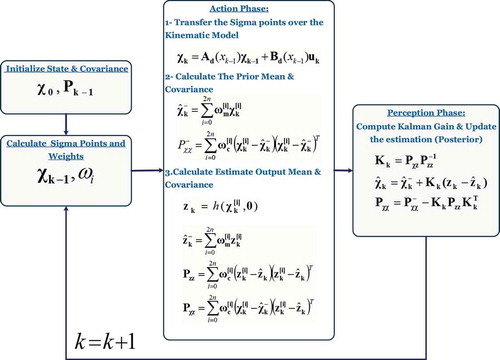
Figure 5. EKF-based path correction.
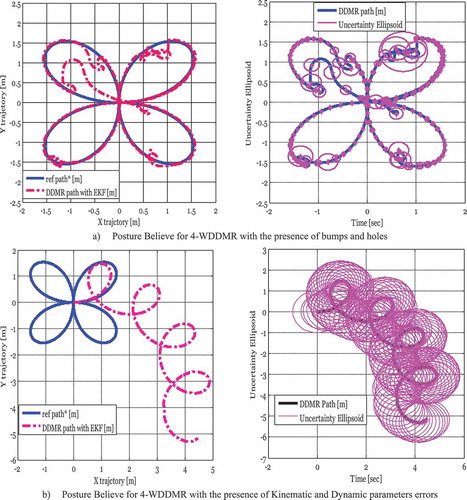
Figure 6. UKF-based path correction.
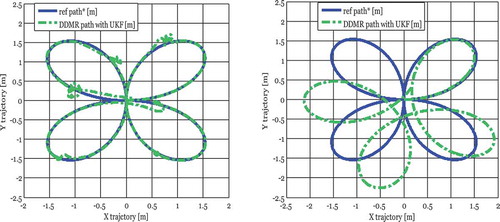
Figure 7. Schematic of ROS software architecture for 4-WDDMR.
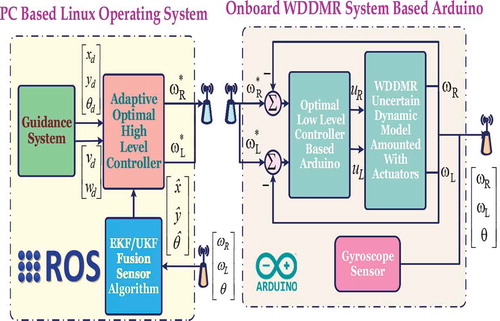
Figure 8. Time response for right and left wheels.
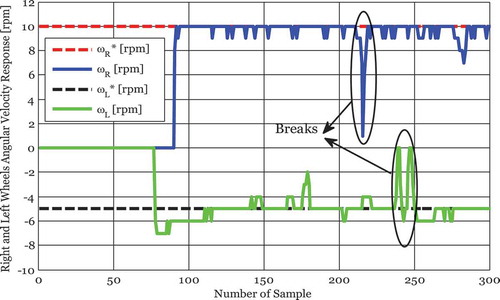
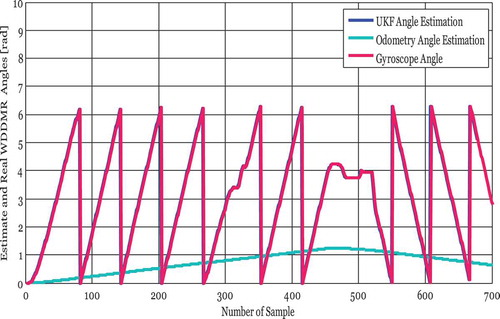
Figure 9. 4-WDDMR orientation tracking.