Figures & data
Figure 1. (a). Delivery of height orders to a home and return of “Smart-boxes”. (b). Side view and Top view of Driverless Delivery Vehicle (DDV)
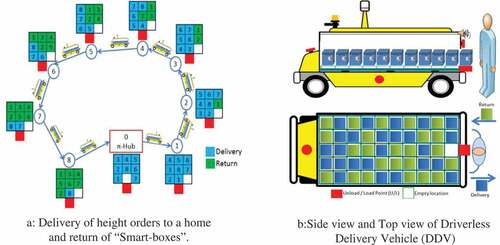
Figure 2. (a) Flex-conveyor (b) Fifteen-Puzzle. (c) Smart-Box
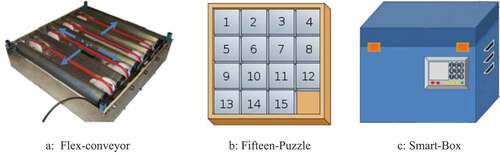
Table 1. Attributes of a “Smart-Box”
Figure 3. N-puzzle model
Figure 4. Arrangement according to Manhattan Distance. They are three different ways for a tile number 20 to reach its targposition (I/O Point), all in the same minimum Manhattan Distance (MD = 5)
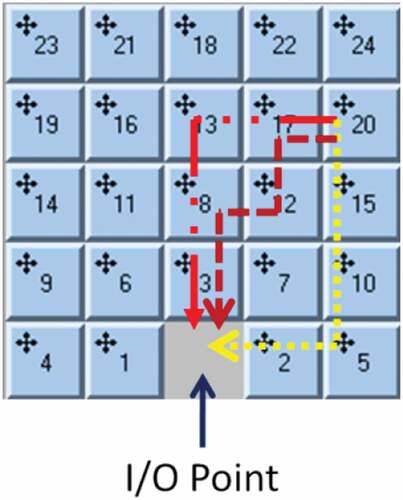
Figure 5. I/O point is located at (,
) = (1, 1) Tile number 19 is located at (
,
) = (3, 4).
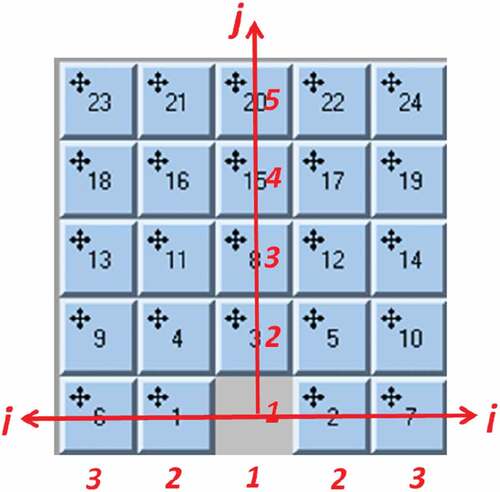
Figure 6. Connected Tiles. Initial Arrangement at PI-Hub 0: Tiles 1, 2 and 3 form a first “snake”, tiles 4 and 5 a second “snake” and the third snake is formed by tiles 6 and 7. Tile 8 is isolated (in this configuration)
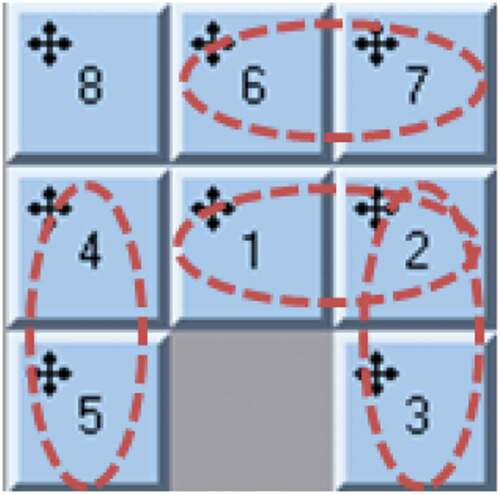
Figure 7. Different initial rearrangement according Manhattan distance (MD), Number of moves (MV), Hybrid rearrangement and rearrangement in “snake-line”
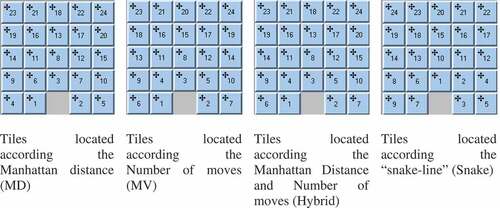
Figure 8. (a). Initial rearrangement at Delivery Pickup Point 3 (Ri). (b). Target state for delivery tile 4 (ti+1). (c). 5 moves for delivery tile 4 according to puzzle-solver (Ri+1). (d). Push-1: 1 Left move for return tile 4
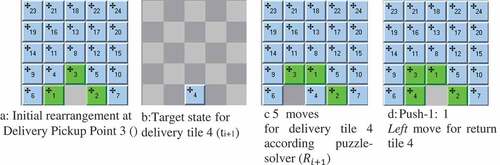
Figure 9. Iterative connections from PI-Hub to Delivery/Pickup point 5
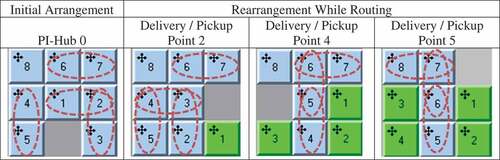
Figure 10. Two feasible rearrangements (5 moves versus 3 moves)
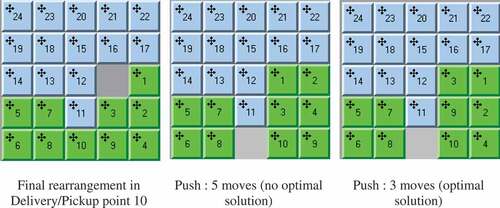
Table 2. Initiatial arrangement and rearrangement for different strategies
Figure 11. In the DDV, it is possible to move more than one tile at each time-unit, if the tiles are in line. The tiles (5 & 7) and (4 & 1) move in line
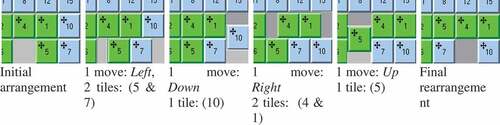
Figure 12. Graphical User Interface GUI
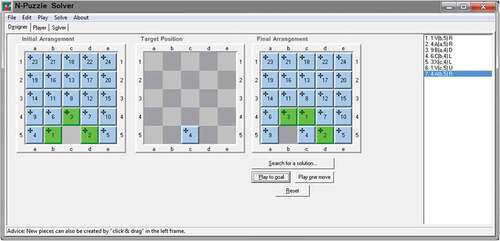
Figure 13. Ratio of moved tiles
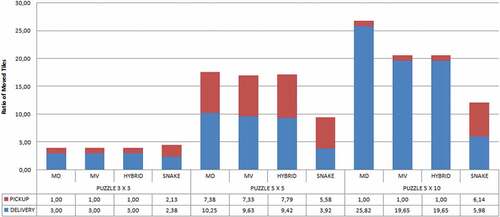
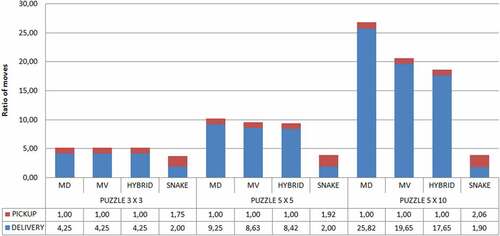
Figure 14. Ratio of number of moves