
Figures & data
Figure 1. Conventional vector control.
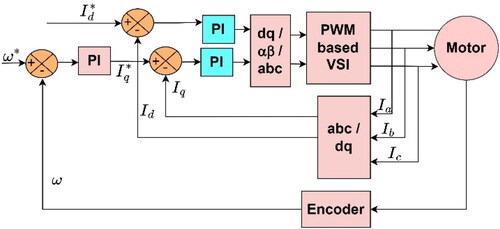
Figure 2. Proposed ML-based control method.
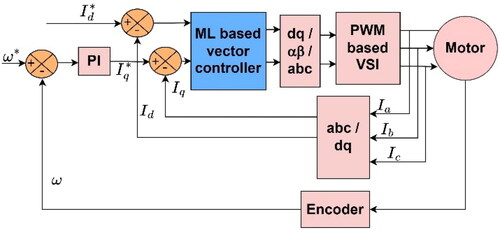
Figure 3. Proposed ML model framework.
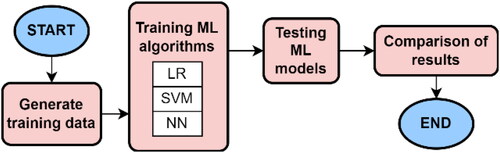
Figure 4. Layout of proposed ML model.
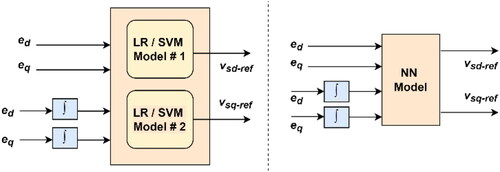
Table 1. Hyperparameter settings for ML models.
Figure 5. NN architecture.
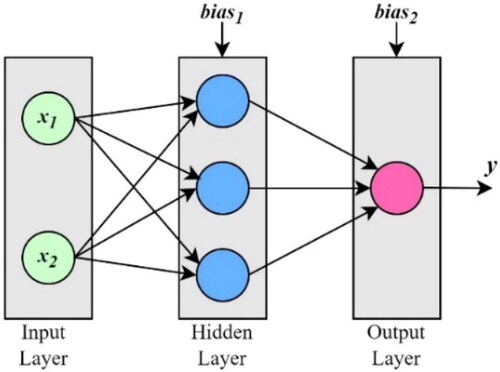
Figure 6. Layout of an artificial neuron.
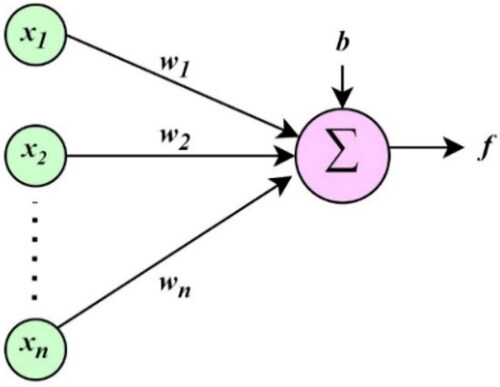
Figure 7. Conventional vs. ML-based controller performance: dq-axis reference voltages: (a) vsd-ref and (b) vsq-ref.
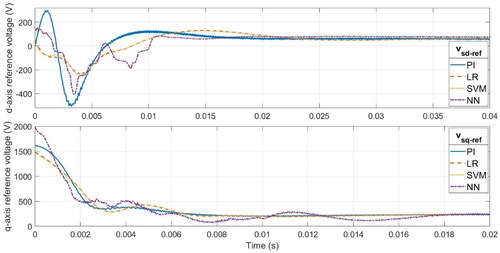
Table 2. PMSM parameters in Simulation model (Qutubuddin and N. Yadaiah, Citation2018, Citation2017).
Figure 8. Conventional vs ML-based controllers: Motor speed response.
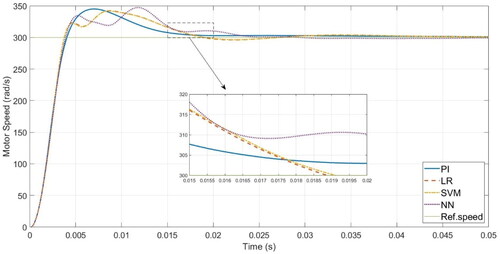
Figure 9. Conventional vs ML-based controllers: Motor torque response.
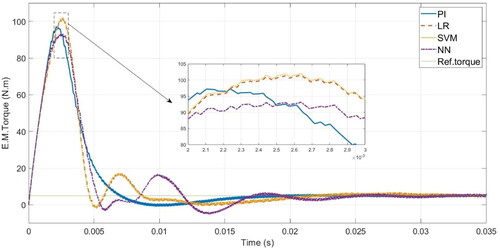
Figure 10. Conventional vs ML-based controllers: Current response of motor drive.
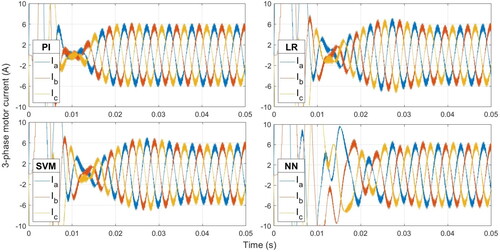
Figure 11. Conventional vs ML-based controllers: dq-axis currents (id, iq) of PMSM drive.
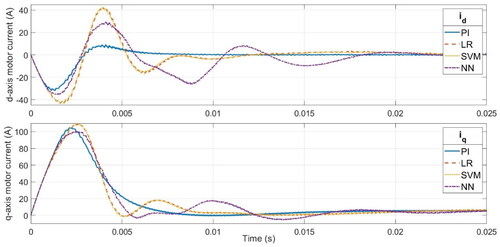
Table 3. Comparison of speed response under rated conditions (Figure 8).
Table 4. Comparison of current control performance (Figure 11).
Figure 12. Conventional vs ML-based controllers: Motor speed response.
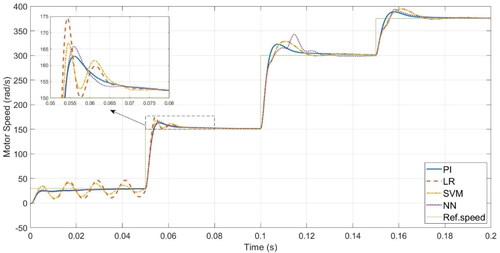
Figure 13. ML-based vs. Conventional controllers: Torque response for speed variations.
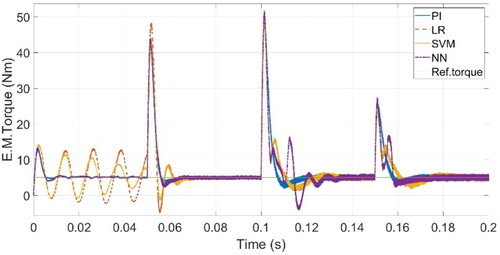
Figure 14. ML-based vs Conventional controllers: Motor current response for speed variations.
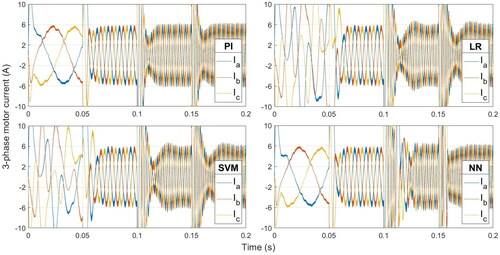
Figure 15. ML-based vs. Conventional controllers: Torque response for load disturbances.
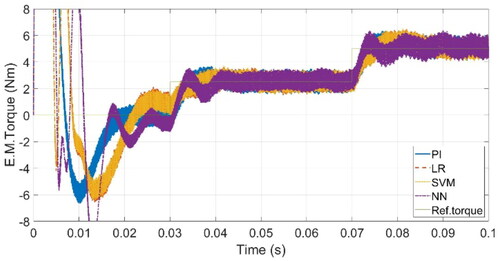
Figure 16. ML-based vs. Conventional controllers: Speed response for load disturbances.
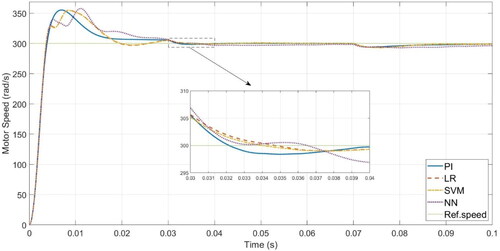
Figure 17. ML-based vs. Conventional controllers: Motor current response for load disturbances.
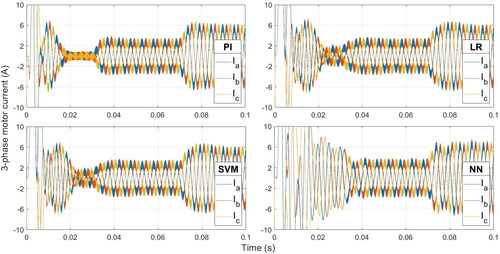
Figure 18. ML-based vs. Conventional controllers: Motor speed response for larger Jeq and Ba.
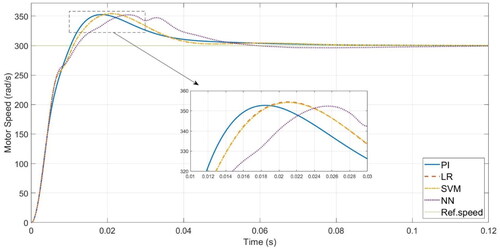
Figure 19. Metrics comparison of speed response ().
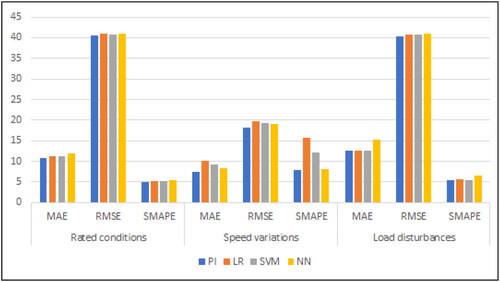
Table 5. Evaluation metrics for speed response under rated conditions.
Figure 20. Metrics comparison of reference voltage output under rated conditions ().
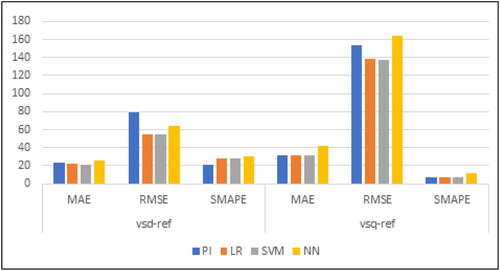
Table 6. Evaluation metrics (vsd-ref, vsq-ref)—rated conditions.
Figure 21. Metrics comparison of reference voltage output under speed variations ().
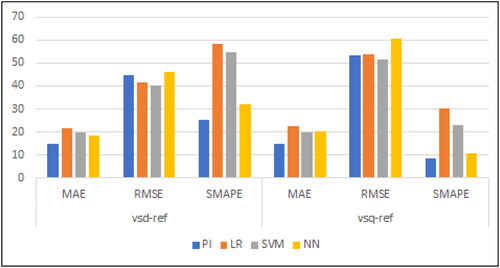
Table 7. Evaluation metrics (vsd-ref, vsq-ref)—speed variations.
Figure 22. Metrics comparison of reference voltage output under load variations ().
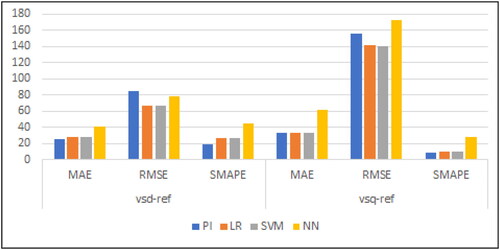
Table 8. Evaluation metrics (vsd-ref, vsq-ref)—load disturbances.
Data availability statement
The data that support the findings of this study are available from the corresponding author, J. L. Febin Daya, upon reasonable request.