
Figures & data
Figure 1. The robot system and component relationships. (a) the robot system; (b) the fixing support; (c) the bone model in the software.
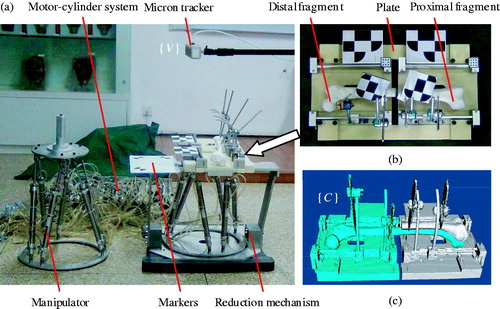
Figure 2. Signal flow diagram of the robot system.
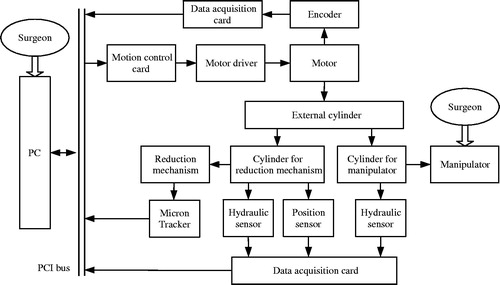
Figure 3. Bilateral force feedback control framework.
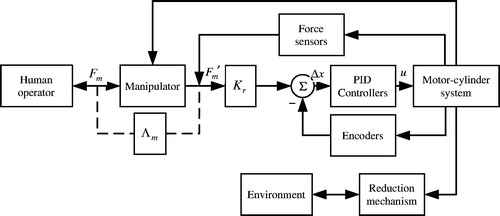
Table 1. Results of the fracture reduction accuracy.