
Figures & data
Figure 1. Surgical tasks: (a) peeling tissue and (b) intracorporeal knot tying.
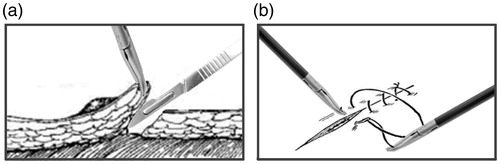
Figure 2. Sketch map of region of interest: (a) region of interest and (b) judgment area.
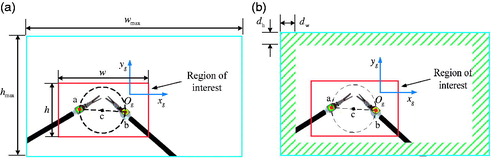
Figure 3. Sketch map of surgical instruments motion in vertical direction (xc - yc plane).
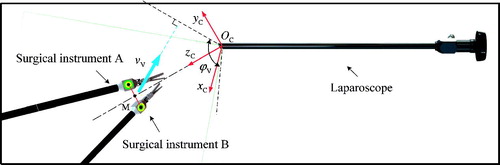
Figure 4. The flow chart of laparoscopic automatic navigation.
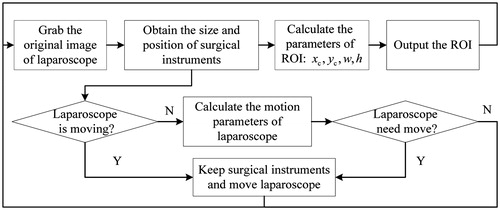
Figure 5. Manipulator with laparoscope.
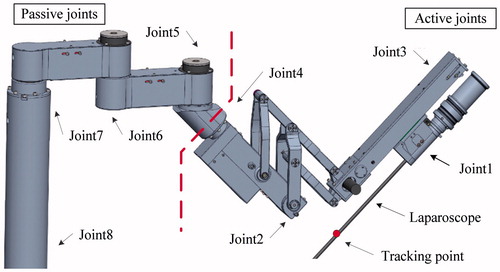
Figure 6. The visual process of simulation: (a) trajectory 1, (b) trajectory 2, and (c) trajectory 3.
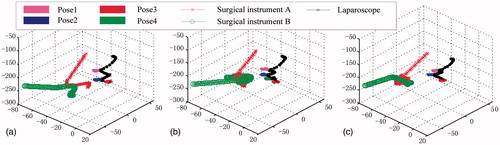
Figure 7. The moving range of ROI: (a) trajectory 1, (b) trajectory 2, and (c) trajectory 3.
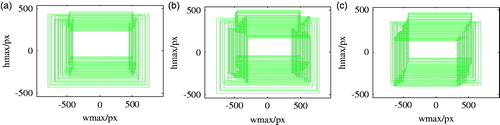
Table 1. The automatic navigation effect under different laparoscopic visual angle (unit: times).