Figures & data
Figure 1. Robotic system minimally invasive surgery. (a) Console (b) Slave arm.
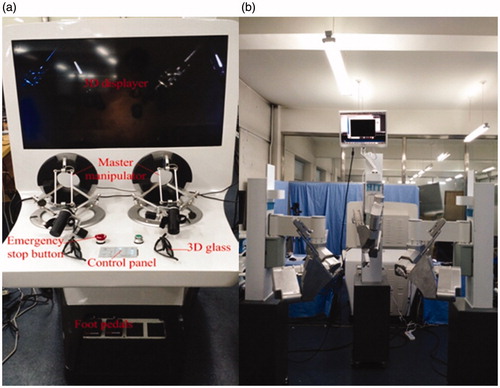
Figure 2. Slave mechanical arm and instrument.
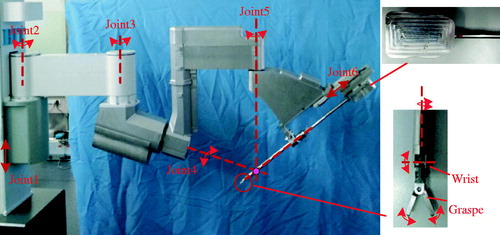
Figure 3. Hardware architecture of MIS robot system.
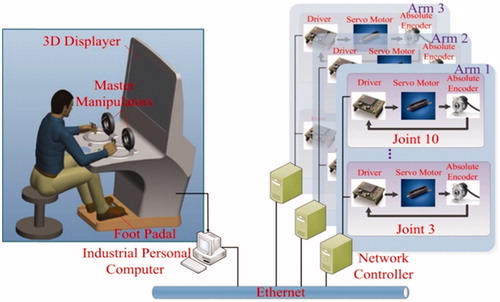
Figure 4. Software architecture of MIS robot system.
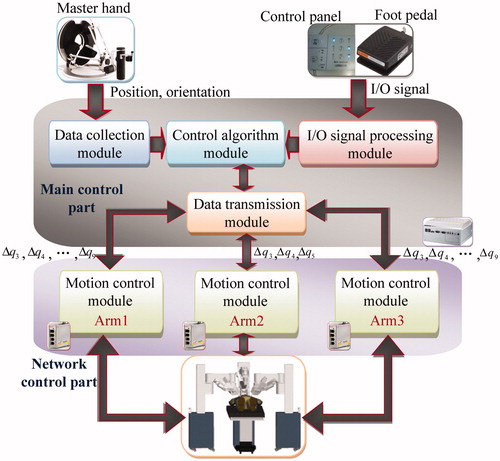
Figure 5. MIS training module.
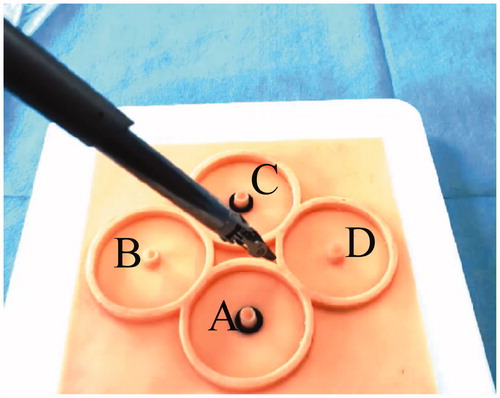
Figure 6. The motion trajectories of the end of master hand and instrument.
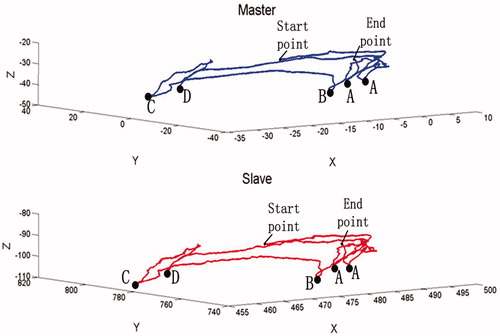
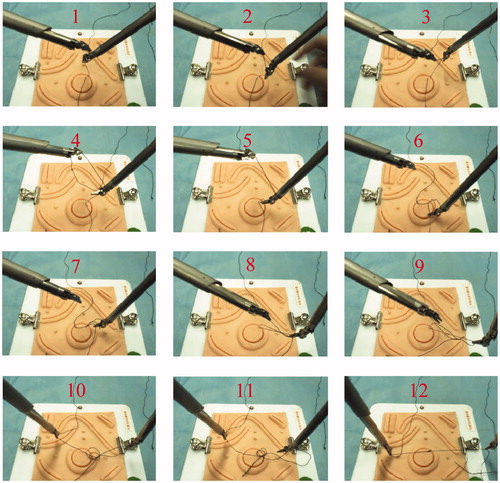
Figure 7. Suturing experiment on the training module.
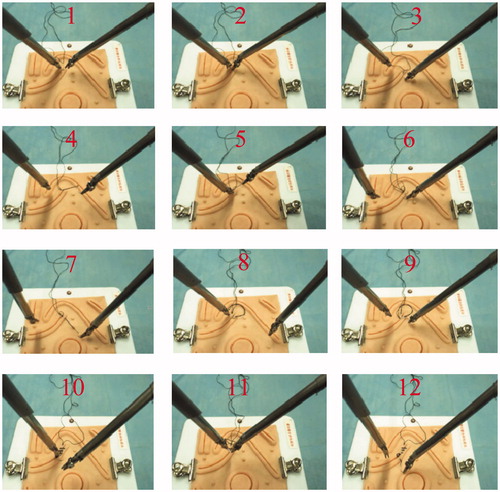
Figure 8. Knotting experiment on the training module.