
Figures & data
Figure 1. The reduction robot system.
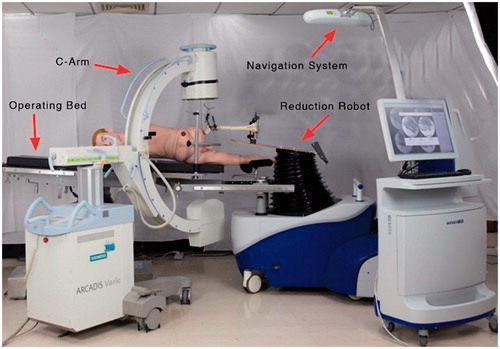
Figure 2. The coordinate systems of the reduction robot.
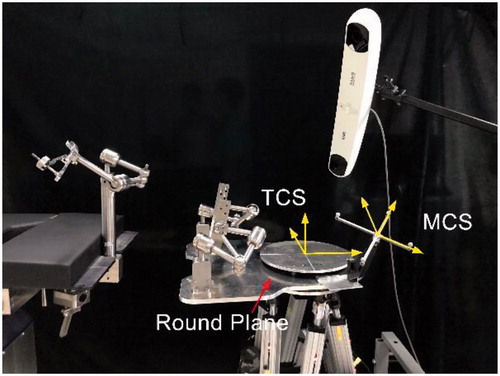
Figure 3. The details of the round plane.
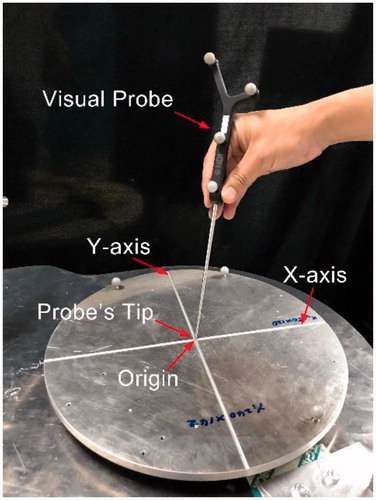
Figure 4. Hand-eye calibration via traditional method.
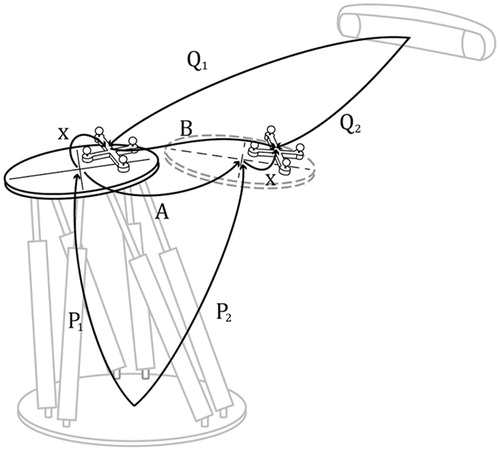
Figure 5. Collecting the points positions of the axis and origin.
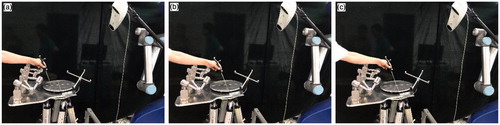
Figure 6. (a) The scattered points collected in MCS. (b) The fitting line of points obtained using SVD. (c) TCS in MCS.
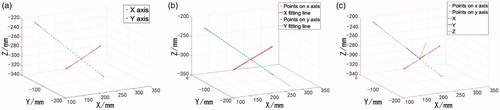
Figure 7. The error distribution analysis in translation and rotation.
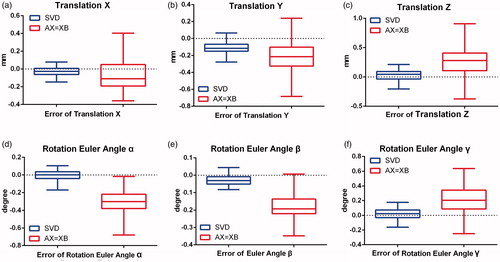
Table 1. The standard deviation of eular and translation.