
Figures & data
Figure 1. Initial setup of bone trackers during a Navio TKA procedure. The bone arrays are fixed using bone screws on the femur and the tibia.

Figure 2. Soft tissue and ligament laxity characterization through full range of motion of the knee joint.

Figure 3. Use of the system point probe to map out the articular surface of the femur.
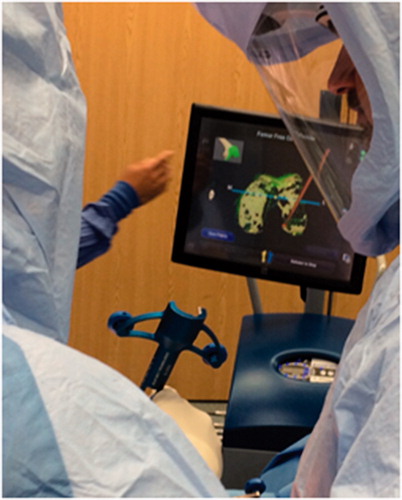
Figure 4. Use of optically-tracked bur to prepare the bone for placement of the cut-guide.
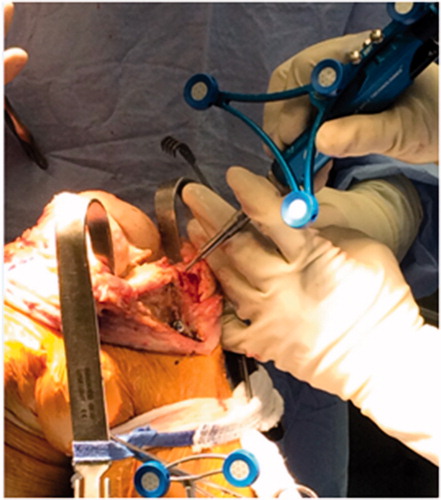
Figure 5. Cut-guide placement based on intra-op plan after the bone cuts.
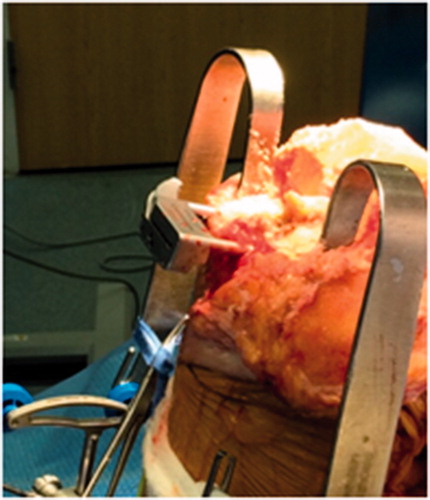
Figure 6. System confirmation of the saw blade cut planes before final bone cuts.
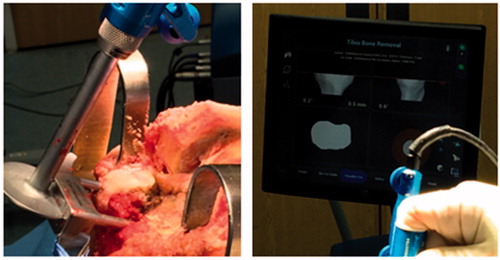
Figure 7. Use of optically navigated hand-held bur to carry out the planned bone cuts.
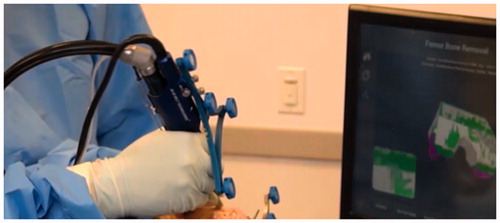
Figure 8. 3D model of a divoted implant.
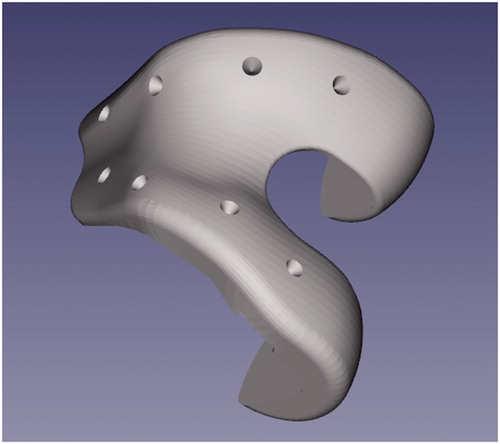
Figure 9. Overlay of planned (yellow) and actual (white) implant positions for 8 cases.
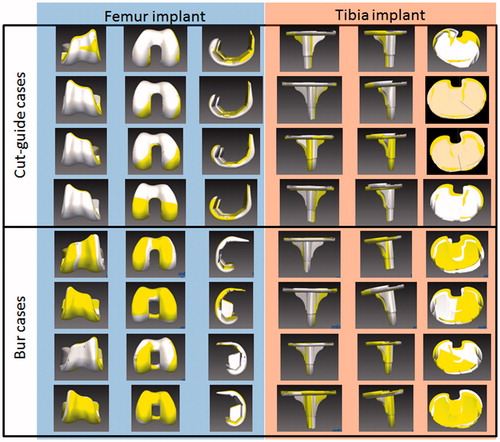
Table 1. Overall, burring and cutguide-based implant placement error.