Figures & data
Figure 1. Experimental platform: A: operating room; B: evaluating systematic error; C: evaluating fluctuations in error influenced by surgical instruments; D: real surgical environment.
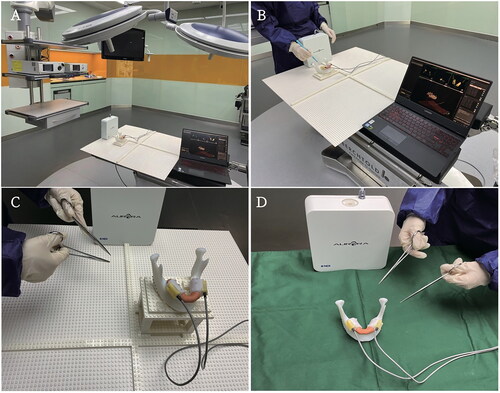
Table 1. System error values prior to placement of each surgical instrument.
Table 2. The 81 standard positions and coordinate values.
Figure 2. Evaluation procedure.
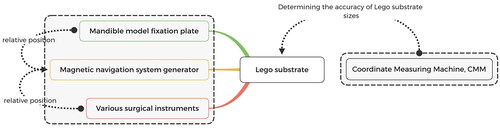
Figure 3. Disturbance of the stitch scissors to magnetic navigation system.
Note: The higher the convexity of the wave chart, the larger the value of the error wave, which indicates stronger interference with the magnetic navigation system.
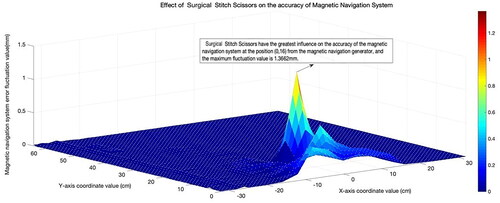
Figure 4. Interference of teeth forceps with magnetic navigation system.
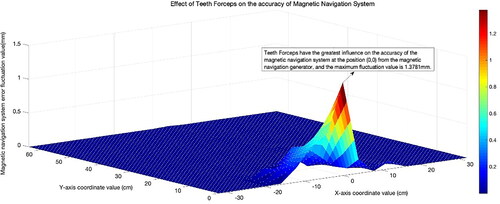
Figure 5. Interference of needle holder with magnetic navigation system.
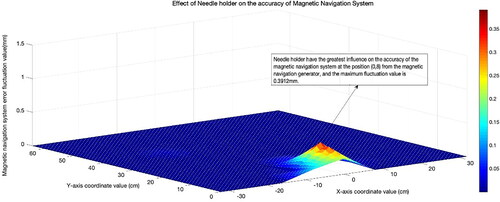
Figure 6. Interference of high-frequency electrosurgical system with magnetic navigation system.
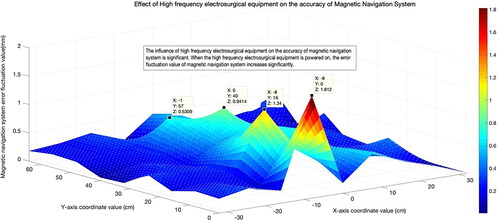
Figure 7. Interference of multiple surgical instruments with magnetic navigation system.
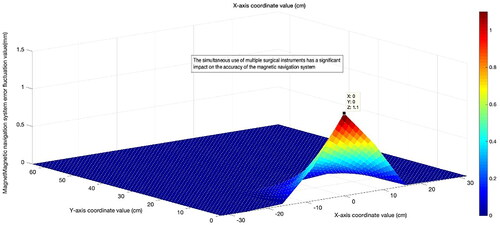
Figure 8. Comparison of interference degree of common surgical instruments on magnetic navigation system. A: Coordinates of peak point position of the stitch scissors (0, 16); B: Coordinates of peak point position of teeth forceps (0, 0); C: Coordinates of peak point position of the needle holder wave (0, 0); and D: Coordinates of the peak point position of the high-frequency electrosurgical system wave (16, 40).
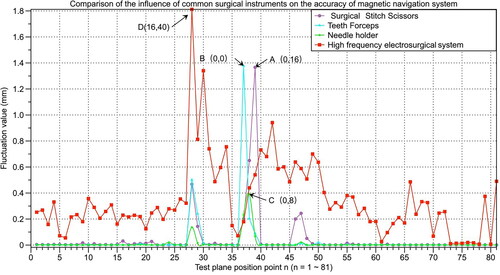
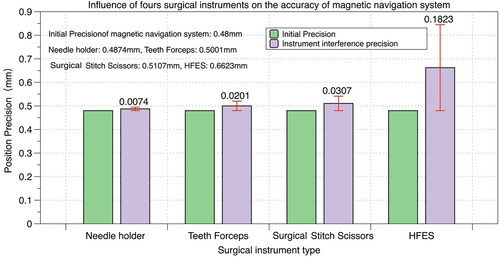
Figure 9. Effect of stitch scissors, teeth forceps, needle holder, and high-frequency electrosurgical system (HFES) on magnetic navigation system accuracy.