Figures & data
Figure 1. Quadrotor axis system.
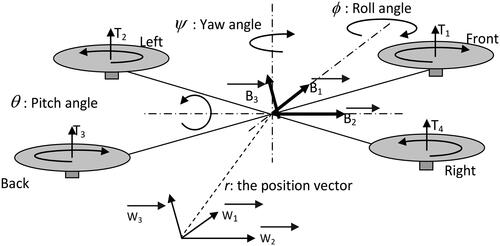
Table 1. Model parameters.
Figure 2. Structure of the fractional-order PIλDμ controller.
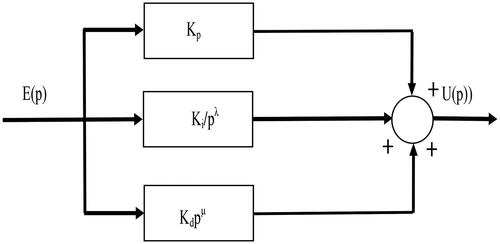
Figure 3. Four-rotor control scheme.
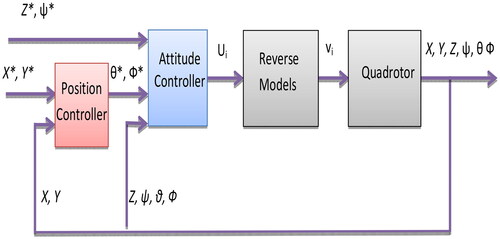
Figure 4. Setpoint tracking responses of angles [φ θ ψ] using FOPD.
![Figure 4. Setpoint tracking responses of angles [φ θ ψ] using FOPD.](/cms/asset/e7d5920f-f066-47ce-8ccf-e6939a347906/tabs_a_2202040_f0004_c.jpg)
Figure 5. Comparison of FOPD and conventional PD responses for angles set-point tracking and disturbance rejection.
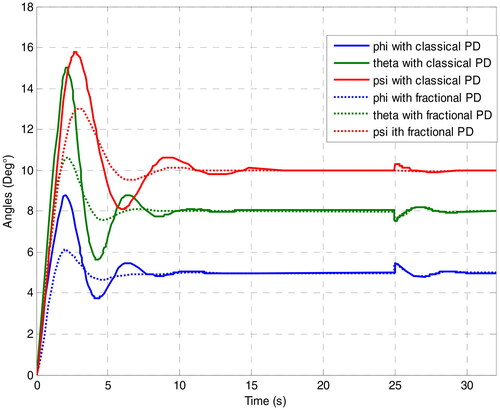
Figure 6. General representation of closed-loop position control.
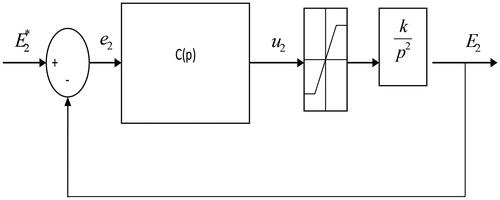
Figure 7. Setpoint responses of positions X and Y using Fractional-order PDµ.
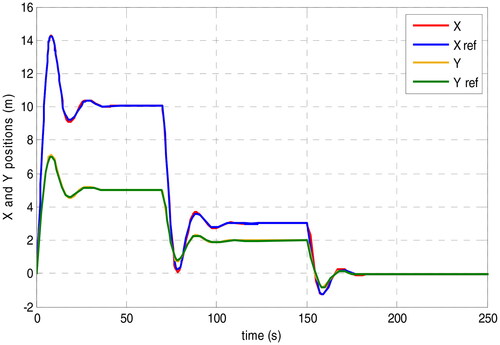
Figure 8. Comparison between FOPD and conventional PD for the control of positions X and Y of quadrotor for set-point tracking and disturbance rejection responses.
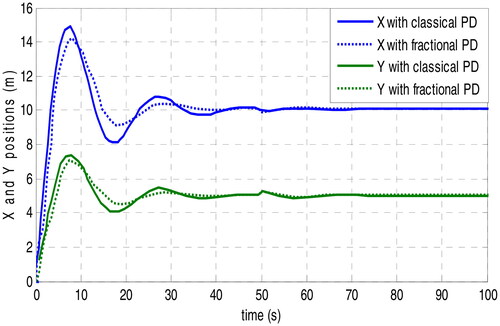
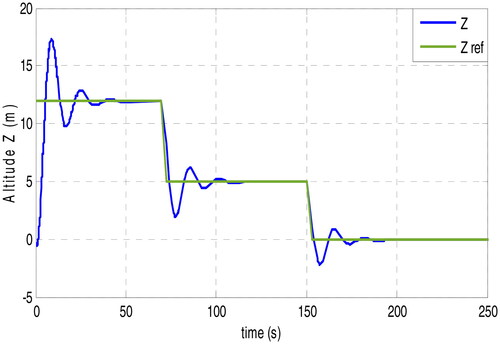
Figure 9. Altitude set-point responses of the fractional PDμ controller and reference model.
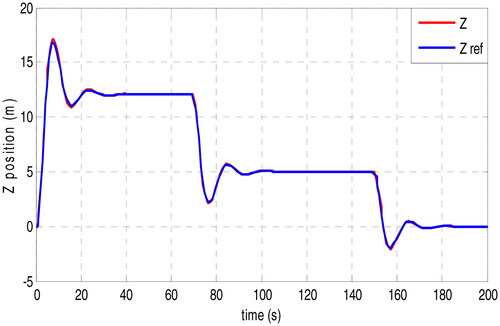
Figure 10. Altitude set-point responses using conventional PD controller.