Figures & data
Table 1. Definitions for symbols used throughout this paper.
Figure 1. Parallel array source and sensor geometry where for a rotation of θ the mth sensor occupies a region . Each of the M sensors in the array has a diameter of d, and is located at a distance D from the source array which consists of N point sources with continuous-wave signals defined by
for the nth source.
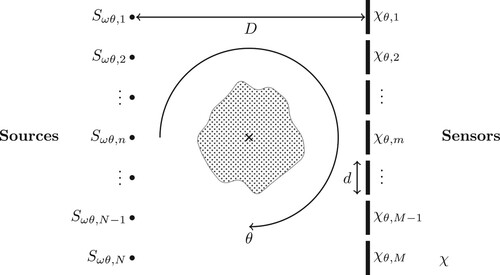
Figure 2. The true absorption difference profile, , that we wish to reconstruct. Region of interest for contrast analysis is indicated by the dashed red line box with the edge of the square-shaped absorption target acting as the mid-line. The parallel array with 10 point sources (white circles on the left) and 10 line sensors with
diameter (white lines on the right) are shown for the zero rotation case,
.
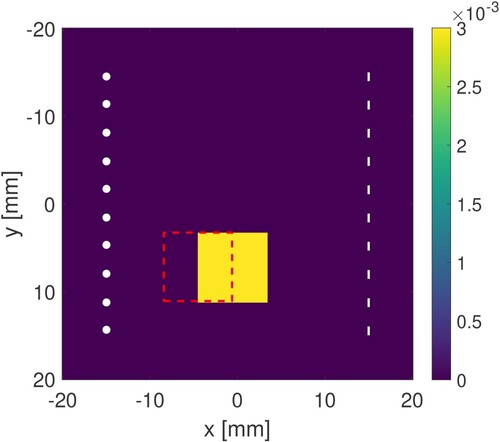
Table 2. Model parameters used for simulations.
Figure 3. Reconstructions for PS and PI sensor types with 3 angles, 1 frequency (), and
sensors. (a) PS reconstruction with 0% noise. (b) PI reconstruction with 0% noise. (c) PS reconstruction with 1% noise. (d) PI reconstruction with 1% noise.
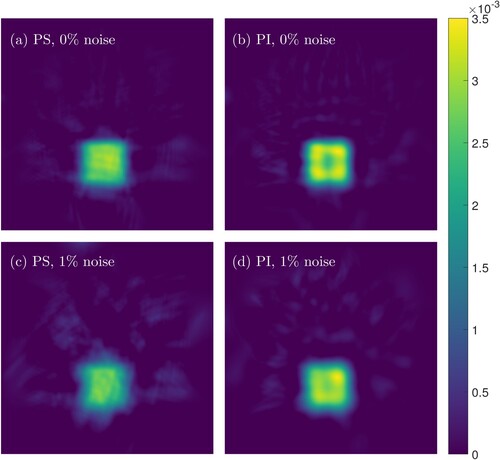
Figure 4. Reconstructions for PS and PI sensor types with 24 angles, 5 frequencies (), and
sensors. (a) PS reconstruction with 0% noise. (b) PI reconstruction with 0% noise. (c) PS reconstruction with 1% noise. (d) PI reconstruction with 1% noise.
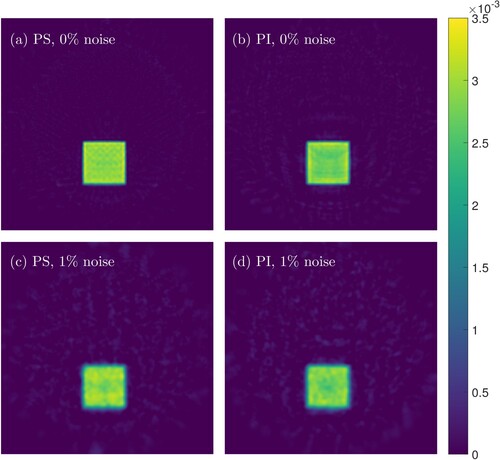
Figure 5. Contrast analysis and error curves for sensors. The plots on the left column show quantities for single-frequency reconstructions, whereas the right column shows the same quantities for 5-frequency reconstructions. (a)–(b) show the MTF FWHM, (c)–(d) show the maximum normalized contrasts, and (e)–(f) show the relative errors. The solid curves correspond to PS reconstructions whereas the dashed curves correspond to the PI reconstructions. The markers along the curves correspond to the noise-free (l) and noisy (♦) cases. (a) MTF FWHM,
, (b) MTF FWHM,
, (c)
,
, (d)
,
, (e) RE,
and (f)RE,
.
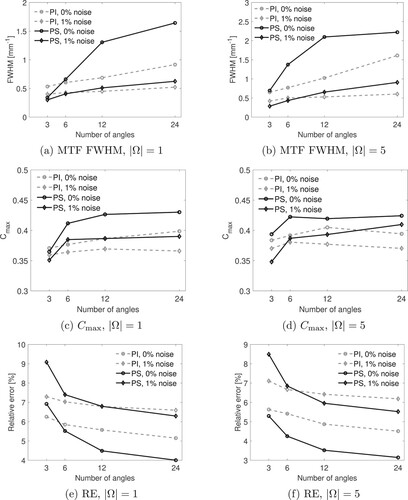
Figure 6. Contrast analysis and error curves for sensors. The plots on the left column show quantities for single frequency reconstructions, whereas the right column shows the same quantities for 5-frequency reconstructions. (a)–(b) show the MTF FWHM, (c)–(d) show the maximum normalized contrasts, and (e)–(f) show the relative errors. The solid curves correspond to PS reconstructions whereas the dashed curves correspond to the PI reconstructions. The markers along the curves correspond to the noise-free (l) and noisy (♦) cases. (a) MTF FWHM,
. (b) MTF FWHM,
. (c)
,
. (d)
,
. (e) RE,
and (f)RE,
.
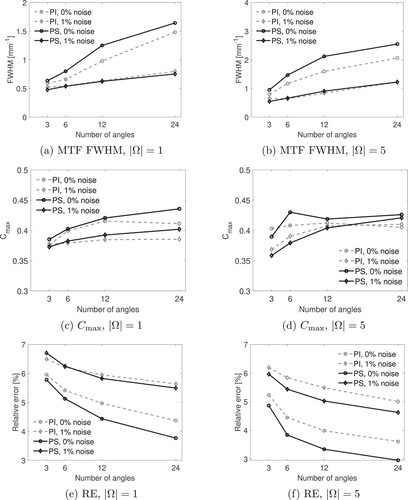
Figure A1. Profile for acoustic medium used for testing Jacobian robustness for sound speed heterogeneities. (a) Binary image of disk-shaped sound speed and square-shaped absorption perturbations in the acoustic medium and (b) Disk-shaped sound speed perturbation for the case of a sound speed deviation [m/s] from the background value.
![Figure A1. Profile for acoustic medium used for testing Jacobian robustness for sound speed heterogeneities. (a) Binary image of disk-shaped sound speed and square-shaped absorption perturbations in the acoustic medium and (b) Disk-shaped sound speed perturbation for the case of a sound speed deviation Δc=30 [m/s] from the background value.](/cms/asset/970b4635-dec6-411a-bb3b-d0c36c690680/gipe_a_2252571_f0007_oc.jpg)
Figure A2. Relative error for reconstructions with increasing sound speed perturbation magnitude for a disk-shaped sound speed perturbation with a radius of
(25 pixels). (a) 3 angles, 1 frequency and(b) 12 angles, 1 frequency
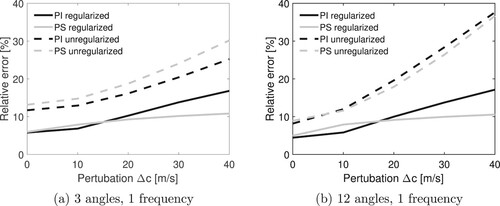
Figure A3. 3 angle minimum error reconstructions for the square-shaped absorption perturbation for varying magnitudes of the disk-shaped sound speed perturbation.
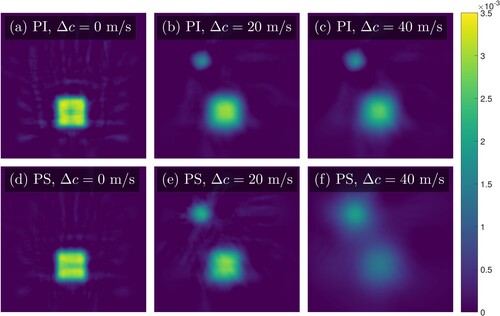
Figure A4. 12 angle minimum error reconstructions for the square-shaped absorption perturbation for varying magnitudes of the disk-shaped sound speed perturbation.
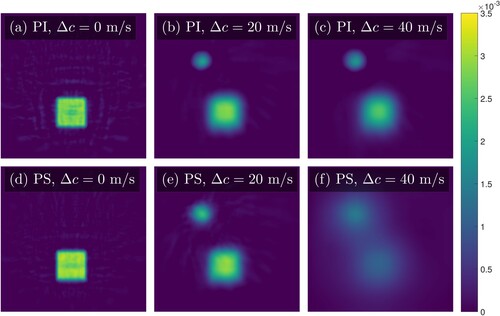
Figure A5. 3 angle unregularised reconstructions for the square-shaped absorption perturbation for varying magnitudes of the disk-shaped sound speed perturbation.
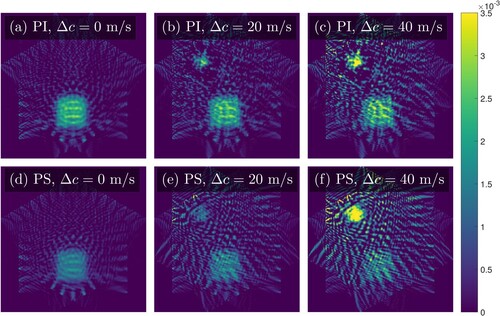
Figure A6. 12 angle unregularised reconstructions for the square-shaped absorption perturbation for varying magnitudes of the disk-shaped sound speed perturbation.
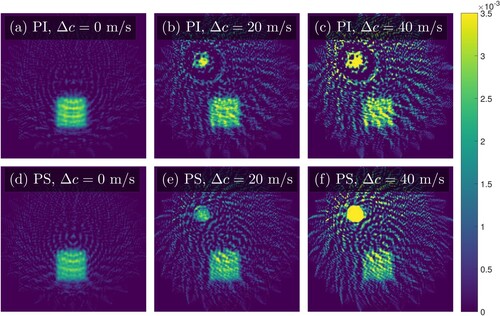
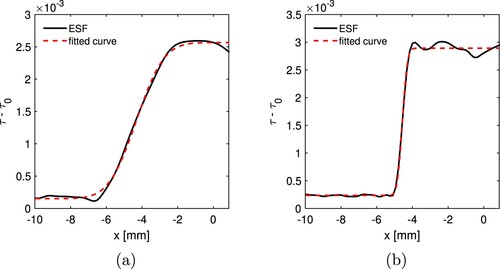
Figure A7. Error function f (red dashed line) fitted to the ensemble average of ESFs (solid black line) for the cases of (a) PS sensors with 3 angles, 1 frequency, and
noise, and (b)
PS sensors with 24 angles, 5 frequencies, and
noise.