Figures & data
Figure 1 Remote sensing platforms employed in precision farming.
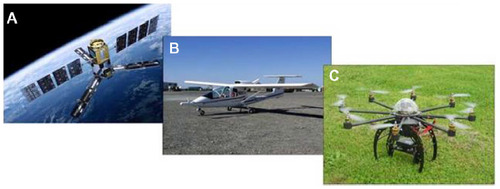
Figure 2 Some kinds of sensors developed ad hoc for monitoring applications for unmanned aerial vehicle platforms.
Abbreviation: LiDAR, light detection and ranging.

Figure 3 Wireless sensor network architecture deployed in a vineyard at Azienda Agricola Castello di Brolio, Siena, Italy.
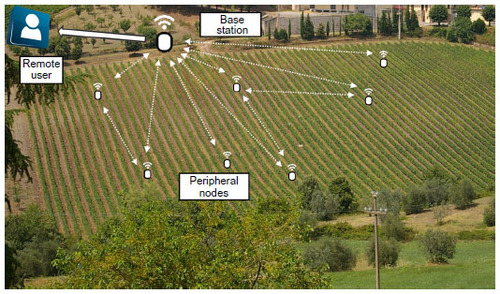
Figure 4 Some sensors employed in wireless sensor networks for proximal sensing in vineyards.
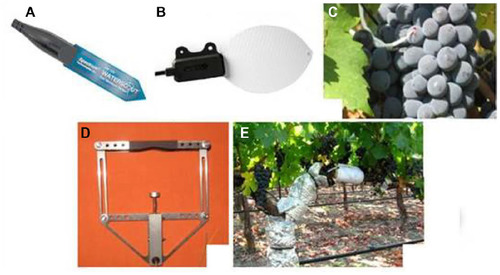
Figure 5 The Trimble® GreenSeeker® multispectral sensor for canopy monitoring, carried on a quad (Practical Precision Inc., Tavistock, Canada) (A) or tractor (Avidorhightech SA, Le Mont-Pèlerin, Switzerland) (B).

Figure 6 Harvester (GREGOIRE Group, Cognac Cedex, France) equipped with a georeferenced yield monitoring system (A) and a yield map of the vineyard (B).
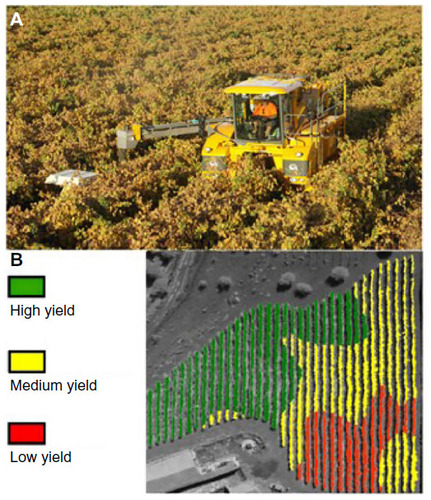
Figure 7 Spectron (A) and Multiplex (B) hand-device sensors for grape quality proximal monitoring, which allows quality maps to be realized.

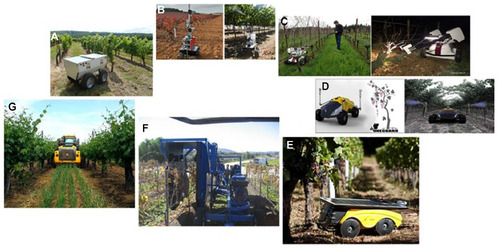
Figure 8 Some automated commercial solutions used in precision viticulture.

Figure 9 Some robot prototypes and commercial solutions for precision viticulture.