Figures & data
Figure 1 Medical tactile endosurgical complex. (A) A tactile mechanoreceptor (general view). (B) An operating head of a tactile mechanoreceptor. (C) A tactile display.
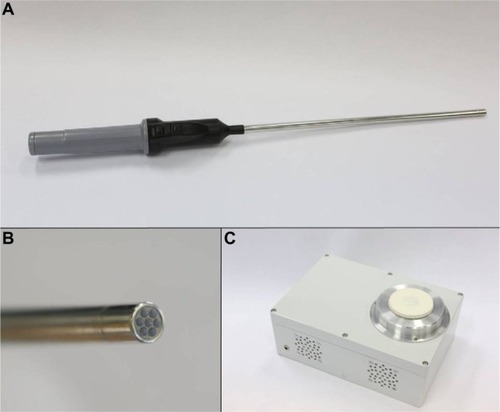
Figure 2 Visualization of tactile frames. (A–C) Tactile frames registered during one press on a homogeneous sample; pressing force grows from (A) to (C). (D–F) Tactile frames registered during one press on a boundary; pressing force grows from (D) to (F). (G) A color scale used for color coding of discretized pressure levels. Each box of a frame is associated with one pressure sensor and contains color-coded value of current pressure and a curve representing previous measurements (measurement remoteness is plotted along the vertical axis, and horizontal axis gives a corresponding discretized pressure level).
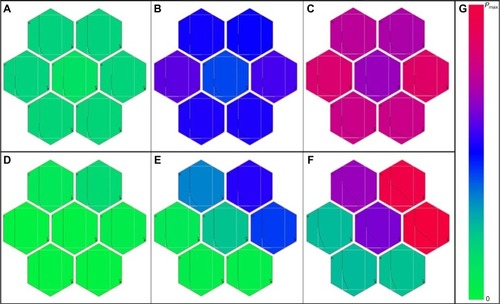
Figure 3 Tactile identification and localization of a visually undetectable lesion during a pancreas resection: simultaneously registered intraoperative video frames and tactile frames. (A) A press on a homogeneous area. (B) A press on the lesion boundary.
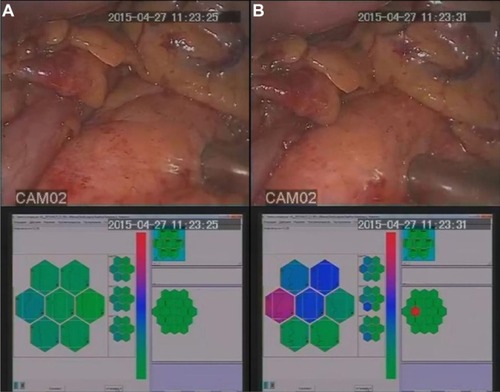
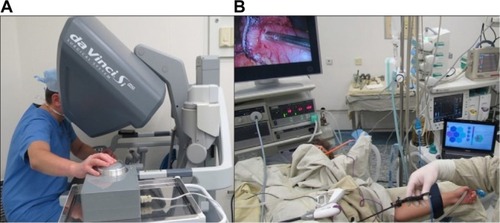
Figure 4 MTEC utilization during a robot-assisted surgery. (A) A surgeon sensing registered tactile data using a tactile display. (B) Intraoperative real-time visualization of registered tactile data.