Figures & data
Figure 1 Overview of the robotic stimulator.
Abbreviations: 3D, three dimensional; EMG, electromyography.
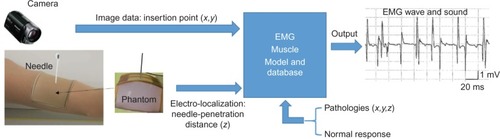
Table 1 Composition of muscle-equivalent phantom for 100×100×10 mm3 dimension
Figure 2 Experimental setup to evaluate the electric field potential and camera hybridization method to localize the needle tip: robotic hand, camera, and phantom.
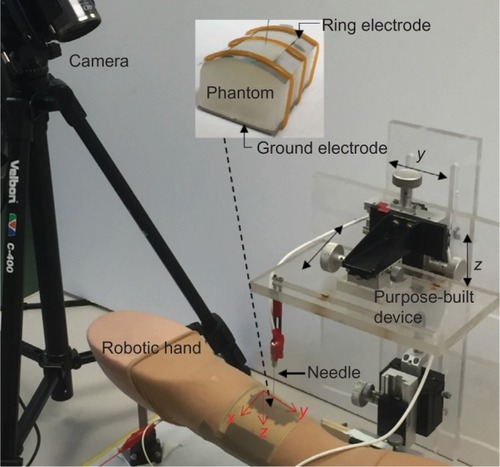
Figure 3 Needle localization method by electric field potential and camera hybridization.
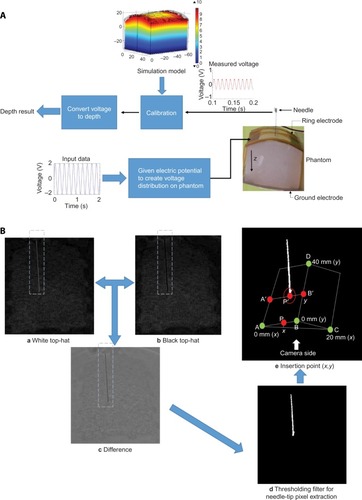
Figure 4 Calibration curves used to improve the estimation of needle penetration distance.
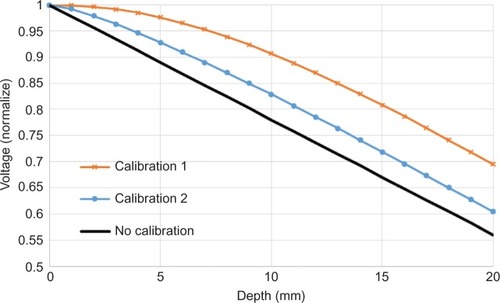
Figure 5 Measurement locations where needle is inserted to estimate the accuracy of the needle-tip localization.
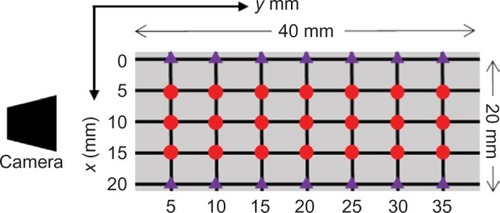
Figure 6 Average needle-penetration distance (z) from the voltage distribution of the phantom before and after voltage calibration: (A) All measurement results and (B) measurement in center region.
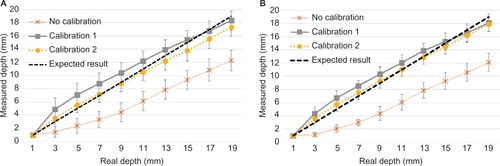
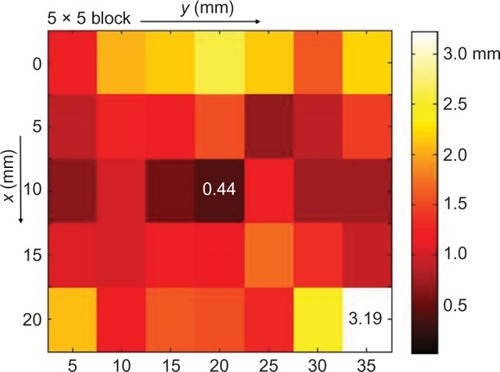
Figure 7 Image processing error (x,y) using 35 insertion points.
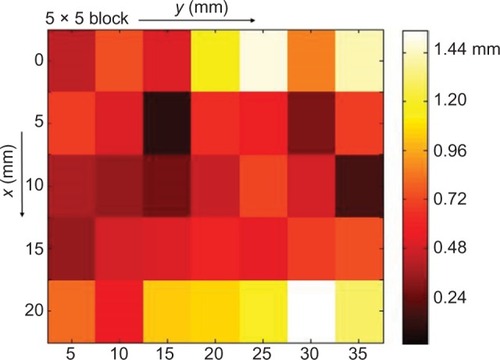
Figure 8 Needle-tip position error (x,y,z) along z-axis using electric field potential and camera hybridization.
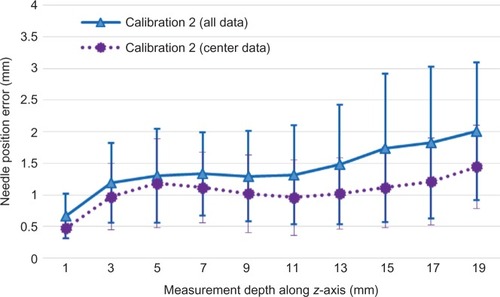
Figure 9 Needle-tip position error (x,y,z) seen from the surface using electric field potential and camera hybridization.