Figures & data
Figure 1. Telerobotic assembly with the surgeon behind the console in a different room from the robotic arms.


Figure 2. (a) Assembly used for Task 1, (b) suture pad used for Task 2, (c) target dots for Task 2, and (d) cutting grid used for Task 3.
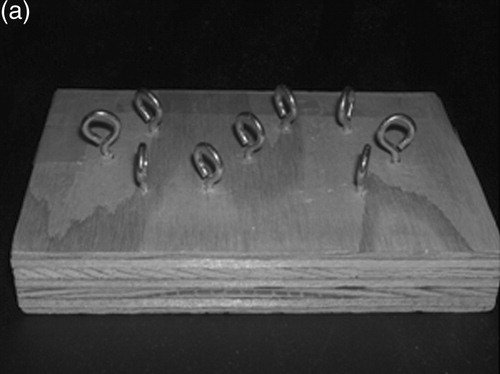
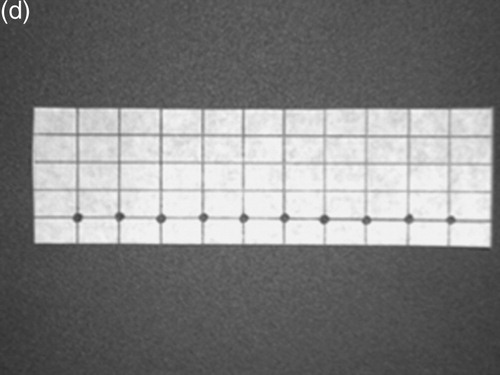
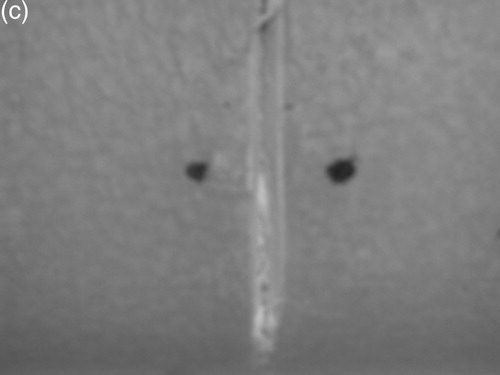
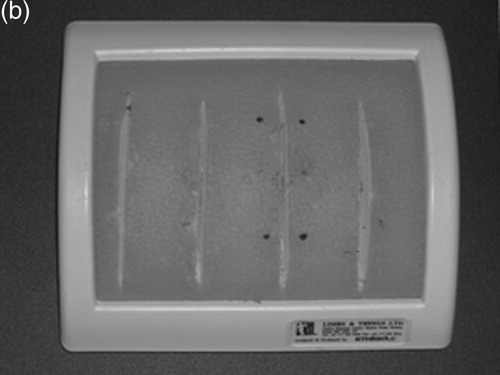
Figure 3. Interaction plot for task time completion scores.
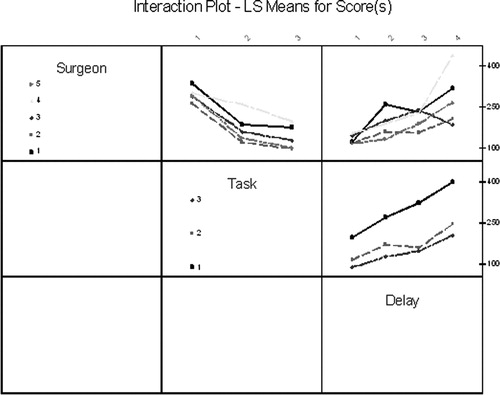
Figure 4. The effect of latency on TCTs.

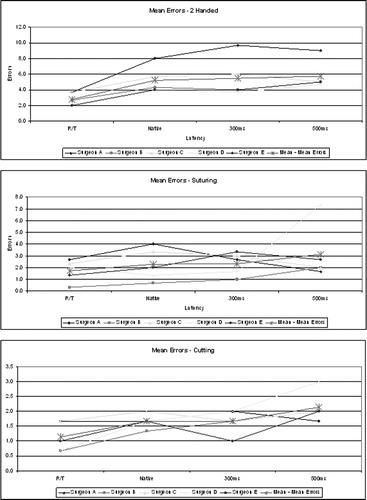
Figure 5. Interaction plot for errors between surgeon and task.
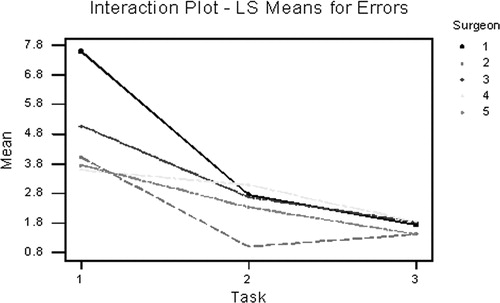
Figure 6. The effect of latency on error rate.