Figures & data
Figure 1. A. Right shoulder: osteotomy of the greater tuberosity. SSP: M. supraspinatus; SSC: M. subscapularis; ….> bicipital groove. B. Placeholder (superimposed display and arrow) in gap l to retain a 2-mm gap between the head and greater tuberosity fragment during plate fixation.
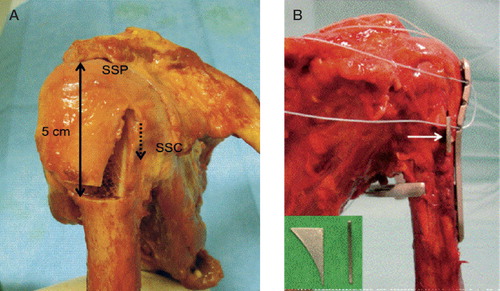
Figure 2. A. Unstable 3-part fracture model with fiber-cerclages of the proximal humerus intact rotator cuff. Fracture gap I (à) and II (- ->). Three point-pairs (….>) for measurement of rotator cuff strain. B. AP and C. axillary views of an unstable 3-part-fracture model.
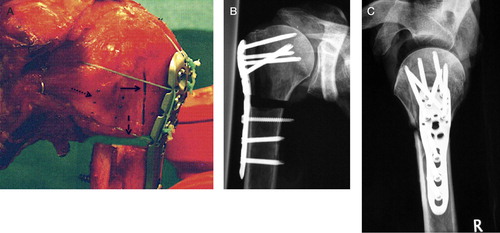
Figure 3. The experimental setup. SSP: M. supraspinatus; ISP-TM: M. infraspinatus and m. teres minor; SSC: M. subscapularis; UMS: ultrasonic measuring system; FMS: force moment sensor; RASS: robot-assisted shoulder simulator; FC-HC: force-controlled hydraulic cylinder; CS: control station.
Table 1. Three-dimensional motions in gap I and II in four physiological-like load cases with (n = 12) and without (n = 12) additive fiber-cerclage. Mean (SD) in mm
Table 2. Vertical motions (z-axis motions) in physiological-like load cases with (n = 12) and without (n = 12) additive fiber-cerclage. Mean (SD) in mm
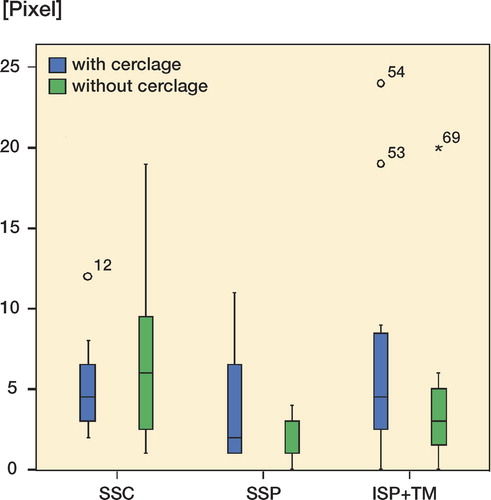
Figure 4. Measurement of rotator cuff strain with (n = 12) and without (n = 12) additive fiber-cerclage. SSC: M. subscapularis; SSP: M. supraspinatus; ISP+TM: M. infraspinatus and m. teres minor.