
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
In this paper, we prove a strong convergence theorem for two different hybrid methods by using CQ method for a finite family of G-nonexpansive mappings in a Hilbert space. We give an example and numerical results for supporting our main results and compare the rate of convergence of the two iterative methods.
1 Introduction
Let be a Hilbert space with the inner product
, norm
and
be a nonempty subset of
. A nonlinear mapping
is said to be
1. contraction if there exists such that
for all
;
2. nonexpansive if for all
.
The fixed point set of is denoted by
, that is,
.
Since 1922, fixed point theorems and the existence of fixed points of a single-valued nonlinear mapping have been intensively studied and considered by many authors (see, for examples [1–7Citation[1]Citation[2]Citation[3]Citation[4]Citation[5]Citation[6]Citation[7]]).
In 1953, Mann [Citation8] introduced the famous iteration procedure as follows: where
and
the set of all positive integers. Many researchers have used Mann’s iteration for obtaining weak convergence theorem (see for example [Citation9–Citation11]).
In 2003, Nakajo and Takahashi [Citation12] introduced a modification of the Mann iteration and called it CQ method. They generated the sequence by
(1.1)
(1.1) for
, where
for some
. They showed that
converges strongly to
.
In 2015, Khan et al. [Citation13] used the following definition defined by Berinde [Citation14] to compare the convergence rate:
Let
and
be two sequences of real numbers with limits
and
, respectively. Assume that there exists
. If
, then we say that
converges faster to
than
to
.
Let be a nonempty subset of a real Banach space
. Let
denote the diagonal of the cartesian product
. Consider a directed graph
such that the set
of its vertices coincides with
, and the set
of its edges with
. We assume
has no parallel edge. So we can identify the graph
with the pair
. A mapping
is said to be
1. G-contraction if satisfies the conditions:
(i) preserves edges of
, i.e.,
(ii) decreases weights of edges of
in the following way: there exists
such that
2. G-nonexpansive if satisfies the conditions:
(i) preserves edges of
, i.e.,
(ii) non-increases weights of edges of
in the following way:
In 2008, Jachymski [Citation15] proved some generalizations of the Banach’s contraction principle in complete metric spaces endowed with a graph. To be more precise, Jachymski proved the following result.
Theorem 1.1
[Citation15]
Let
be a complete metric space, and a triple
has the following property:
for any sequence
if
and
for
and there is the subsequence
of
with
for
.
Let
be a G-contraction, and
. Then
if and only if
.
When is a sequence in
, we denote the strong convergence of
to
by
and the weak convergence by
.
In 2015, Tiammee et al. [Citation16] and Alfuraidan [Citation17] employed the above theorem to establish the existence and the convergence results for G-nonexpansive mappings with graphs.
Motivated by Nakajo and Takahashi [Citation12] and Tiammee et al. [Citation16], we introduce the modified CQ method for proving a strong convergence theorem for G-nonexpansive mappings in a Hilbert space endowed with a directed graph. Moreover, we provide some numerical examples to support our main theorem.
2 Preliminaries and lemmas
Let be a nonempty, closed and convex subset of a Hilbert space
. The nearest point projection of
onto
is denoted by
, that is,
for all
and
. Such
is called the metric projection of
onto
. We know that the metric projection
is firmly nonexpansive, i.e.,
for all
. Furthermore,
holds for all
and
; see [Citation18].
A mapping is called
-inverse strongly monotone if there exists a positive real number
such that
We know that if
is nonexpansive, then
is
-inverse strongly monotone; see [Citation19] for more details. We consider the following variational inequality problem: find a
such that
The set of solutions of the variational inequality (2.1) is denoted by
.
We need the following known results.
Lemma 2.1
[Citation18]
Let
be a real Hilbert space. Then
for all
and
.
Lemma 2.2
[Citation20]
Let
be a nonempty, closed and convex subset of a real Hilbert space
. Given that
and
, the set
is convex and closed.
Lemma 2.3
[Citation12]
Let
be a nonempty, closed and convex subset of a real Hilbert space
and
be the metric projection from
onto
. Then the following inequality holds:
Lemma 2.4
[Citation21]
Let
be a real Hilbert space and let
. For
such that
, the following identity holds:
Lemma 2.5
Let
be a nonempty subset of a Hilbert space
and
a directed graph such that
. Let
be a G-nonexpansive mapping. Then, for any
, there exists a positive number
such that
for all
, whenever
with
,
and
.
Proof
Let , for some
and
.
We consider the following two cases.
Case I. If , then
If
, then we have
Case II. If , then for any nonnegative number
, we have
If
and
, then we have
We next prove the demiclosedness principle of a G-nonexpansive mapping.
Lemma 2.6
Let
be a nonempty, closed and convex subset of a Hilbert space
and
a directed graph such that
. Let
be a G-nonexpansive mapping and
be a sequence in
such that
for some
. If, there exists a subsequence
of
such that
for all
and
for some
, then
.
Proof
Let be a sequence in
such that
and
for some
. Set
,
. Then
. We may assume, without loss of generality, that
. By the assumption, there exists a subsequence
of
such that
. We set
. Let
. Since
as
, there exists
such that
Lemma 2.5 gives that, for each
,
. By the weak compactness of
, it contains the weak limit
of
. This shows that
. Hence
, that is,
, since
is arbitrary. □
3 Main results
In this section, by using the CQ method, we obtain two different strong convergence theorems for finding the same common fixed point of a finite family of G-nonexpansive mappings in real Hilbert spaces.
Theorem 3.1
Let
be a nonempty closed and convex subset of a real Hilbert space
and let
be a directed graph such that
and
is convex. Let
be a finite family of G-nonexpansive mappings of
into itself. Assume that
,
is closed and
for all
. For an initial point
with
, let
be a sequence generated by
(3.1)
(3.1)
where
for all
such that
for all
. Assume that
dominates
for all
and if there exists a subsequence
of
such that
, then
. Then the sequence
converges strongly to
Proof
We split the proof into six steps.
Step 1. Show that is well-defined for each
As shown in Theorem 3.2 of Tiammee et al. [Citation16], is convex for all
. It follows now from the assumption that
is closed and convex. Hence,
is well-defined.
Step 2. Show that is well-defined for each
From the definition of and
, it is obvious that
is closed and convex for all
. It follows from Lemma 2.2 that for each
,
is closed and convex for all
. This implies that
is also closed and convex for all
. Let
and
. Since
dominates
, we have
Step 3. Show that exists.
Since is a nonempty, closed and convex subset of
, there exists a unique
such that
From
and
,
, we get
(3.3)
(3.3) On the other hand, as
, we obtain
(3.4)
(3.4) It follows from (Equation3.3)
(3.3)
(3.3) and Equation(3.4
(3.4)
(3.4) ) that the sequence
is bounded and nondecreasing. Therefore
exists.
Step 4. Show that as
.
For , by the definition of
, we see that
. Noting that
and
, by Lemma 2.3, we get
From Step 3, we obtain that
is a Cauchy sequence. Hence, there exists
such that
as
. In particular, we have
(3.5)
(3.5) Step 5. Show that
.
Since , it follows from (Equation3.5
(3.5)
(3.5) ) that
(3.6)
(3.6) as
for all
. Since
, we have
It follows from
for all
and (Equation3.6
(3.6)
(3.6) ) that
(3.7)
(3.7) as
for all
. From
and Lemma 2.6, we have
.
Step 6. Show that .
Since , we have
(3.8)
(3.8) By taking the limit in (Equation3.8
(3.8)
(3.8) ), we obtain
(3.9)
(3.9) Since
, so
. This completes the proof. □
Theorem 3.2
Let
be a nonempty closed and convex subset of a real Hilbert space
and let
be a directed graph such that
and
is convex. Let
be a finite family of G-nonexpansive mappings of
into itself. Assume that
,
is closed and
for all
. For an initial point
with
, let
be a sequence generated by
(3.10)
(3.10)
where
for all
such that
and
for all
. Assume that
dominates
for all
and if there exists a subsequence
of
such that
, then
. Then the sequence
converges strongly to
Proof
From Step 1 in the proof of Theorem 3.1, we have that is well-defined for each
. We know from Step 2 in the proof of Theorem 3.1 that
is closed and convex for all
. Let
. Since
dominates
, we have
Remark 3.3
The sequences generated in Theorem 3.1 and 3.2 converge to
under the different conditions on the sequence
.
We know that every G-nonexpansive mapping is nonexpansive [Citation16], then we obtain the following results.
Corollary 3.4
Let
be a nonempty closed and convex subset of a real Hilbert space
. Let
be a finite family of nonexpansive mappings of
into itself. Assume that
. For an initial point
with
, let
be a sequence generated by
(3.12)
(3.12)
where
for all
. Assume that
for all
Then the sequence
converges strongly to
Corollary 3.5
Let
be a nonempty closed and convex subset of a real Hilbert space
. Let
be a finite family of nonexpansive mappings of
into itself. Assume that
. For an initial point
with
, let
be a sequence generated by
(3.13)
(3.13)
where
for all
such that
. Assume that
for all
Then the sequence
converges strongly to
Putting where
is an identity mapping in Theorem 3.1 –3.2, we obtain the following result.
Corollary 3.6
Let
be a nonempty closed and convex subset of a real Hilbert space
and let
be a directed graph such that
and
is convex. Let
be a G-nonexpansive mapping of
into itself. Assume that
,
is closed and
. For an initial point
with
, let
be a sequence generated by
(3.14)
(3.14)
where
such that
. Assume that
dominates
for all
and if there exists a subsequence
of
such that
, then
. Then the sequence
converges strongly to
Remark 3.7
The iterative scheme (Equation3.14(3.14)
(3.14) ) extends the CQ method (Equation1.1
(1.1)
(1.1) ) from a nonexpansive mapping to a G-nonexpansive mapping.
If , we know that
is nonexpansive; see [Citation19]. Then, we obtain the following results.
Corollary 3.8
Let
be a nonempty closed and convex subset of a real Hilbert space
. Let
be a finite family of
-inverse strongly monotone with
. For an initial point
with
, let
be a sequence generated by
(3.15)
(3.15)
where
for all
and
. Assume that
for all
Then the sequence
converges strongly to
Corollary 3.9
Let
be a nonempty closed and convex subset of a real Hilbert space
. Let
be a finite family of
-inverse strongly monotone with
. For an initial point
with
, let
be a sequence generated by
(3.16)
(3.16)
where
for all
such that
and
. Assume that
for all
Then the sequence
converges strongly to
4 Examples and numerical results
In this section, we give examples and numerical results for supporting our main theorem.
Example 4.1
Let and
. Assume that
if and only if
or
. Define two mappings
by
for any
. Let
and
. It is easy to check that
are G-nonexpansive. On the other hand,
are not nonexpansive for
and
. This implies that
and
.
For generated by (Equation3.1
(3.1)
(3.1) ), we divide the process of our iteration into 3 Steps as follows:
Step 1. Find . Since
and
, we obtain that
and
We observe the following cases:
Case 1 : If , then
,
Case 2 : If , then
. Thus,
,
Case 3 : If , then
. Thus,
,
Similarly, we have ; where
,
; where
and
; where
,
Step 2. Find . We observe the following cases:
Case 1 : If , then
,
Case 2 : If , then
. Thus,
,
Case 3 : If , then
. Thus,
,
.
Step 3. Compute the numerical results of . Choose
, we have
From , we see that is the solution of iteration (Equation3.1
(3.1)
(3.1) ).
We next show that our iteration generated by (Equation3.10(3.10)
(3.10) ) also converges to 1. As the same above process, choose
. (See .)
From , we see that the iteration (Equation3.10(3.10)
(3.10) ) converges to
. (See .)
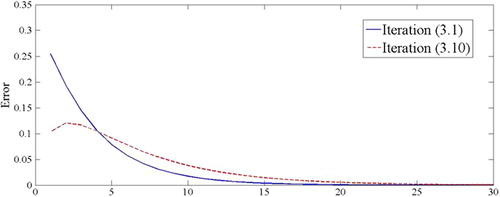
Table 1 Numerical results of iteration (Equation3.1 (3.1) (3.1) ).
(3.1) (3.1) ).
Table 2 Numerical results of iteration (Equation3.10(3.10) (3.10) ).
In the same way of Khan ([Citation13], Example 3), we can conclude the following remark.
Remark 4.2
We see that the iteration (Equation3.1(3.1)
(3.1) ) converges faster than the iteration (Equation3.10
(3.10)
(3.10) ) under the same conditions.
Notes
Peer review under responsibility of Kalasalingam University.
References
- Agarwal R.P. O’Regan D. Sahu D.R. Fixed Point Theory for Lipschitzian-Type Mappings with Applications 2009 Springer
- Banach S. Sur les oprations dans les ensembles abstraits et leur application aux quations intgrales Fund. Math. 3 1922 133 181
- Browder F.E. Nonexpansive nonlinear operators in a Banach space Proc. Natl. Acad. Sci. USA 54 1965 1041 1044
- Browder F.E. Convergence of approximants to fixed points of non-expansive maps in Banach spaces Arch. Ration. Mech. Anal. 24 1967 82 90
- Goebel K. Kirk W.A. Topics in Metric Fixed Point Theory 1990 Cambridge University Press Cambridge
- Goebel K. Reich S. Uniform Convexity Hyperbolic Geometry, and Nonexpansive Mappings vol. 73 (1984) Marcel Dekker. New York, NY, USA.
- Takahashi W. Yao J.C. Fixed point theorems and ergodic theorems for nonlinear mappings in Hilbert spaces Taiwanese J. Math. 15 2011 457 472
- Mann W.R. Mean value methods in iteration Proc. Amer. Math. Soc. 4 1953 506 510
- Genal A. Lindenstrass J. An example concerning fixed points Israel J. Math. 22 1975 81 86
- Reich S. Weak convergence theorems for nonexpansive mappings in Banach spaces J. Math. Anal. Appl. 67 1979 274 276
- Schu J. Iterative construction of fixed points of asymptotically nonexpansive mapping J. Math Anal. Appl. 158 1991 407 413
- Nakajo K. Takahashi W. Strongly convergence theorems for nonexpansive mappings and nonexpansive semigroups J. Math. Anal. Appl. 279 2003 372 379
- Khan A.R. Gürsoy F. Karakaya V. Jungck–Khan iterative scheme and higher convergence rate Int. J. Comput. Math. 2015 10.1080/00207160.2015.1085030
- Berinde V. Picard iteration converges faster than the Mann iteration in the class of quasi-contractive operators Fixed Point Theory Appl. 2 2004 97 105
- Jachymski J. The contraction principle for mappings on a metric space with a graph Proc. Amer. Math. Soc. 136 4 2008 1359 1373
- Tiammee J. Kaewkhao A. Suantai S. On Browder’s convergence theorem and Halpern iteration process for G-nonexpansive mappings in Hilbert spaces endowed with graphs Fixed Point Theory Appl. 2015 2015 187 10.1186/s13663-015-0436-9
- Alfuraidan M.R. Fixed points of monotone nonexpansive mappings with a graph Fixed Point Theory Appl. 2015 2015 49 10.1186/s13663-015-0299-0
- Takahashi W. Nonlinear Functional Analysis 2000 Yokohama Publishers Yokohama
- Takahashi S. Takahashi W. Strong convergence theorem for a generalized equilibrium problem and a nonexpansive mapping in a Hilbert space Nonlinear Anal. 69 2008 1025 1033
- Kim T.H. Xu H.K. Strongly convergence of modified Mann iterations for with asymptotically nonexpansive mappings and semigroups Nonlinear Anal. 64 2006 1140 1152
- Chidume C.E. Ezeora J.N. Krasnoselkii-type algorithm for family of multi-valued strictly pseudo-contractive mappings Fixed Point Theory Appl. 2014 2014 111
- Marino G. Xu H.K. Weak and strong convergence theorems for strict pseudo-contractions in Hilbert spaces J. Math. Anal. Appl. 329 2007 336 346