
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
The pressure waves propagating through an incompressible inviscid fluid that moves in a circular cylindrical long elastic tube are considered. The reductive perturbation method is used to derive the KdV equation from the hydrodynamic equations of the system. The Euler–Lagrange variational technique described by Agrawal has been applied to formulate the time-fractional KdV equation. The derived time-fractional KdV equation is solved by employing the variational-iteration method represented by He. The effects of the tube and fluid parameters and the time fractional order on the propagation of pressure waves are investigated.
1 Introduction
The propagation of pressure waves in fluid that moves in large vessels was studied by many authors, e.g. References Citation1–Citation[2]Citation[3]Citation[4]Citation[5]Citation[6]Citation[7]Citation[8]Citation[9]Citation[10]Citation[11]Citation[12]Citation[13]Citation[14]Citation[15]Citation16. Many of the works studied the small amplitude wave propagation in elastic tubes, ignored the nonlinear effects and focused on the dispersive characteristic [Citation3–Citation[4]Citation5]. When the nonlinear character appears, either finite amplitude or small-but-finite amplitude wave is considered, depending on the nonlinearity order. The propagation of finite waves through fluid filled elastic or viscoelastic tubes was studied [Citation6–Citation[7]Citation9]. Also, the small-but-finite amplitude waves propagating in distensible tubes were investigated [Citation10–Citation[11]Citation16], where the Korteweg–de Vries (KdV) equation appears due to the balancing between the nonlinearity and the dispersion effects.
The KdV equation as evolution and interaction model of nonlinear waves is employed to represent a wide range of physical phenomena. The KdV equation was first formulated as an evolution equation governing one-dimensional, small amplitude, long surface gravity waves propagating in a shallow water channel [Citation17]. Afterward, the KdV equation has appeared in a number of other physical problems such as ion-acoustic waves, collision-free hydro-magnetic waves, plasma physics, stratified internal waves, lattice dynamics, etc. [Citation18]. By means of the KdV model, some theoretical physics phenomena in quantum mechanics domain and continuum mechanics for shock wave formation are explained. The KdV model is also applied in many scientific fields like fluid dynamics, aerodynamics, solitons, turbulence, boundary layer behavior and mass transport.
Most of the forces in nature are non-conservative: dissipative and/or dispersive forces. The classical mechanics treated conservative forces using integer differential equations, while the non-conservative forces can be described in terms of the non-integer differential equations. Non-integer differentiation and integration is called Fractional Calculus, which is a field of mathematics study that generalizes the traditional definitions of calculus integral and derivative operators. During the last decades, Fractional Calculus has acquired importance due to its applications in various fields of science and engineering, including electrical networks, signal processing, optics, fluid flow, viscoelasticity, rheology, probability and statistics, dynamical process in self-similar and porous structures, diffusive transport, control theory of dynamical systems, electrochemistry of corrosion, and so on [Citation19–Citation[20]Citation[21]Citation[22]Citation[23]Citation[24]Citation[25]Citation[27]Citation[28]Citation[29]Citation[30]Citation[31]Citation[32]Citation[33]Citation[34]Citation[35]Citation35].
Riewe [Citation19,Citation20] used fractional derivatives [Citation21–Citation[22]Citation23] in the action to have non-conservative Euler–Lagrange equations. In terms of Riemann–Liouville fractional derivatives, Agrawal [Citation24–Citation[25]Citation26] used variational technique to formulate fractional equations of motion. These Euler–Lagrange equations are employed to investigate different real problems [Citation27–Citation[28]Citation[29]Citation[30]Citation[31]Citation[32]Citation[33]Citation[34]Citation[35]Citation35].
The fractional differential equations are solved by applying several methods such as: Fourier transformation method, Laplace transformation method, operational method, and the iteration method [Citation21–Citation[22]Citation23]. However, most of these methods are suitable only for special types of fractional differential equations, called linear with constant coefficients. Recently, there are some works dealing with the solutions of nonlinear fractional differential equations using techniques of nonlinear analysis such as: Adomian decomposition method (ADM) [Citation36–Citation[37]Citation[38]Citation[39]Citation[40]Citation[41]Citation42], variational-iteration method (VIM) [Citation43–Citation[44]Citation48], homotopy perturbation method (HPM) [Citation49,Citation50] and others. Adomian decomposition method [Citation36–Citation[37]Citation38] succeeded to solve accurately different types of fractional nonlinear differential equations by applying the Adomian polynomials. This method is applied to study many problems arising from applied sciences and engineering [Citation39–Citation[40]Citation42]. The variational-iteration method [Citation43–Citation[44]Citation46] was successfully employed to solve many types of linear, nonlinear and fractional differential equations that describe scientific and engineering problems [Citation46–Citation[47]Citation48]. As advantages over ADM, the VIM solves differential equations without using Adomian polynomials and has no linearization or perturbation for solving the nonlinear and fractional problems. The VIM principles for solving the differential equations are given in many papers, e.g. References Citation46–Citation[47]Citation48. The VIM solution is provided as a convergent series, which may lead to exact solution for linear differential equations and to an efficient numerical solution for nonlinear and fractional differential equations. The series solution begins with a trial function that can be used as the solution of the linear term of the differential equation.
Our main motive here is to study the time fractional parameter effects on the propagation of solitary pressure waves through a fluid filled elastic tube. Therefore, beside what is considered in Reference Citation16, the derived nonlinear KdV equation is transformed using variational technique described by Agrawal [Citation24–Citation[25]Citation26] into the time fractional KdV (TFKdV) equation [Citation45]. The TFKdV equation is solved by applying VIM [Citation46–Citation[47]Citation48] developed by He and the effect of the fractional order is studied.
This paper is organized as follows: The basic set of tube and fluid equations, which governs our system, is presented in section 2. In section 3, the KdV equation is derived by applying the reductive perturbation method [Citation51]. Section 4 is devoted to derive and solve the time fractional KdV (TFKdV) equation using variational methods. Finally, some results and discussion are presented in section 5.
2 Basic equations of motion of the tube and fluid
A circular cylindrical long tube of un-deformed radius , subjected to a uniform initial inner pressure
is considered. A position vector
of a general point on the tube is described as [Citation11,Citation12]:
(1a)
(1a)
(1b)
(1b) where
is the radius of the tube after a finite static deformation,
is a finite dynamic time dependent deformation in the tube radius,
and
are the radial and axial unit vectors, respectively in the cylindrical polar coordinates.
is the axial coordinate before the deformation,
is the axial coordinate after the static deformation and
is the axial stretch ratio. The equation of motion of a small element of the tube's wall in the radial direction is given by [Citation11,Citation12]
(2)
(2) where
and
are the mass density and the shear modulus of the tube material, respectively.
is the strain energy density function,
is the fluid pressure at the final inner deformed tube radius
and
is the initial un-deformed tube thickness.
and
are the radial and axial cylindrical coordinates, respectively after both static and dynamic deformations and
is the time parameter.
and
are the axial and radial direction stretches, respectively and are represented by [Citation11,Citation12]
(3a)
(3a)
(3b)
(3b)
(3c)
(3c) where
is the radial stretch ratio after finite static deformation.
Equation Equation(2)(2)
(2) has been derived by applying Newton's second law of motion for a small element of the tube wall material [Citation11,Citation12]. The term in the left hand side is Newton's second law force of the wall element. In the right hand side, the first term is the force due to axial tension of the tube wall, the second term is the force due to the tension in the radial direction and the third term is the force due to the inner fluid pressure on the tube wall element.
The value of the fluid pressure at the final radius of the deformed tube () can be obtained from (2) as
(4)
(4)
On the other hand, the fluid that filled the tube is considered to be an incompressible inviscid fluid. The ratio of the viscous term to the nonlinear term is assumed to be very small. Therefore, the viscous effect in comparison to the nonlinear effect will be neglected. Based on these assumptions, the incompressible inviscid fluid filled the tube has equations of axially symmetrical motion in the cylindrical polar coordinates represented by [Citation12,Citation13](5a)
(5a)
(5b)
(5b)
(5c)
(5c)
The first equation Equation(5a)(5a)
(5a) is the incompressibility condition (mass conservation) of the fluid, while Equation(5b)
(5b)
(5b) and Equation(5c)
(5c)
(5c) are conservative equations of fluid momentum in radial and axial directions, respectively.
These field equations (5) satisfy boundary conditions at the wall as follows:
The pressure at the final deformed radius of the tube is given as(6a)
(6a) while the fluid velocity at the wall is assumed to equal the radial velocity of the wall itself (no-slip condition) [Citation13], so
(6b)
(6b)
Here and
are the radial and axial fluid velocity components, respectively,
is the fluid pressure and
is the fluid mass density.
The strain energy density is generally a function of
and
. Expanding
into power series at its equilibrium, (4) can take the form [Citation16]
(7)
(7) where the coefficients
,
,
and
are defined by
(8a)
(8a)
(8b)
(8b)
Equations (5)–(7) give sufficient relations to determine the unknowns ,
,
, and
.
3 The Evolution equation
The following stretched co-ordinates can be introduced by applying the reductive perturbation theory [Citation51] as:(10)
(10) where
is a smallness parameter and
is the long wave approximation's phase velocity. The physical quantities represented in (5)–(8) are expanded as power series in
as:
(11a)
(11a)
(11b)
(11b)
(11c)
(11c)
(11d)
(11d)
Substituting (10) and (11) into (5) and (6), applying (7) and equating the coefficients of different powers of , the following results are obtained:
The coefficient of the first-order of is
(12a)
(12a) with the boundary condition
(12b)
(12b)
Meanwhile, the coefficients of are given as
(13a)
(13a)
(13b)
(13b) with boundary condition
(13c)
(13c) where
(13d)
(13d)
The coefficient of gives the following equation
(14a)
(14a) under the boundary condition
(14b)
(14b)
The coefficients of are given in the forms
(15a)
(15a)
(15b)
(15b)
with the boundary condition(15c)
(15c)
Eliminating the second order perturbation quantities ,
,
and
in (14) and (15) employing (12) and (13) to define the first order perturbation quantities
,
and
lead to KdV equation for the first-order perturbation pressure
in the form:
(16)
(16) where
represents the first-order perturbation pressure
. The nonlinear coefficient
and dispersion coefficient
are defined, respectively by
(17a)
(17a)
(17b)
(17b)
To study the effect of time fractional derivative on the pressure pulses propagation in inviscid non-Newtonian incompressible fluid, the KdV equation Equation(16)(16)
(16) must be represented in terms of time-fractional form as in the following section.
4 Time-fractional KdV equation and its solution
The TFKdV equation in (1 + 1) dimension can be formulated following El-Wakil et al. [Citation45] to have the form [see Appendix A]:(18)
(18)
where the Riesz fractional operator is represented by [Citation21–Citation[22]Citation23]
(19)
(19)
The TFKdV equation represented by (18) can be solved using the VIM [Citation43–Citation[44]Citation[45]Citation46] in terms of the following correction functional [see Appendix B](20)
(20)
where the Riesz integral operator is represented by [Citation21–Citation[22]Citation23]
(21)
(21)
If the parameter represents the time-variable in (18), the right Riemann–Liouville fractional derivative in Riesz fractional operator can be interpreted as future states of the system. Therefore, this term may be neglected in calculations, when the present state of the system does not depend on the results of the future development [Citation23].
The initial value of the state variable can be taken to represent the zero-order correction of the solution. This initial value is taken as the solution of the ordinary KdV equation at time equal to zero, in this case as:(22a)
(22a) where
,
.
Substituting the zero-order solution (22a) into (20) leads to the first order approximation as(22b)
(22b)
Substituting this equation into (20) and using the Mathematical package like Maple or Mathematica lead to the second order approximation in the form(22c)
(22c)
The higher order approximations can be calculated using a symbolic mathematical package to the appropriate order where the infinite approximation leads to exact solution.
5 Results and discussion
Blood is known to be an incompressible non-Newtonian fluid. The order of hematocrit ratio (red cell concentration) and the deformability of red blood cells are the main factors that make blood behave like a Newtonian fluid. Experimental observations show that blood behaves as a Newtonian fluid when the shear rate is high. Blood viscosity can be considered very small to be neglected with respect to its nonlinear term. Due to these observations, it can be assumed that blood can be treated as incompressible inviscid fluid.
The reductive perturbation method [Citation51] is applied to drive the KdV equation for a system of fluid filled elastic tube. A variational method suggested by Agrawal [Citation24–Citation[25]Citation26] is used to derive the TFKdV equation. The VIM [Citation43–Citation[44]Citation[45]Citation[46]Citation[47]Citation48] developed by He [Citation46] is employed to solve the derived equation by applying the Riemann–Liouville definition for the fractional derivative.
The numerical results are made physically relevant by applying parameters close to experimental data in dogs [Citation52,Citation53]. The average values of the parameters are founded experimentally as ,
,
,
,
,
,
,
,
,
and
. These experimental data are employed to study the pressure waves in dogs' blood and the wave forms are represented in different figures.
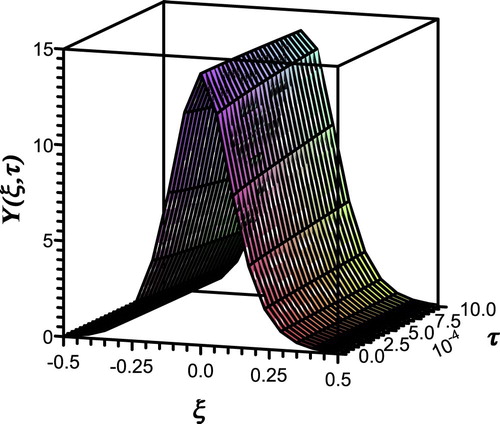
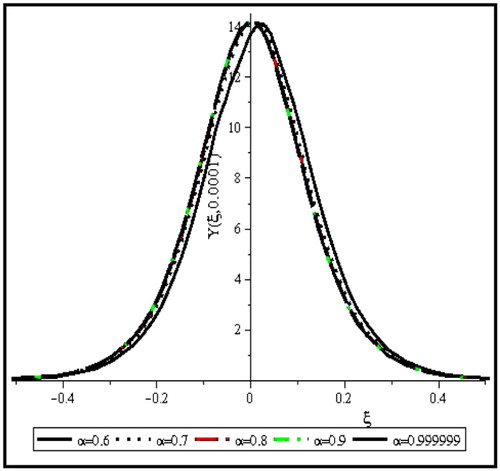
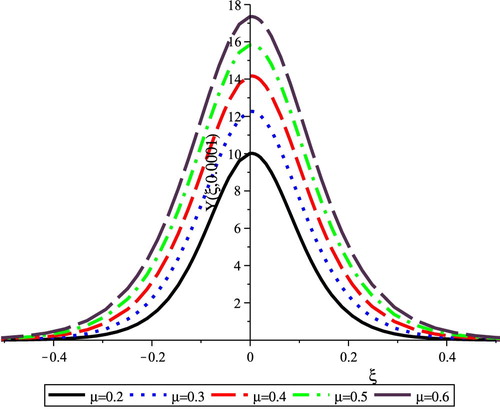
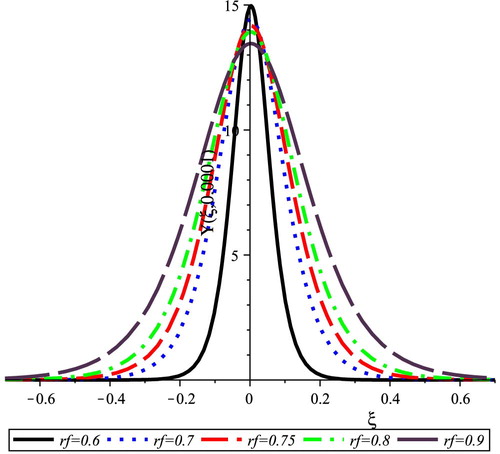
The pressure wave against space and time at fractional parameter has soliton shape as presented in Fig. 1, which means that the pressure wave has constant shape through the artery. Effect of the variation of
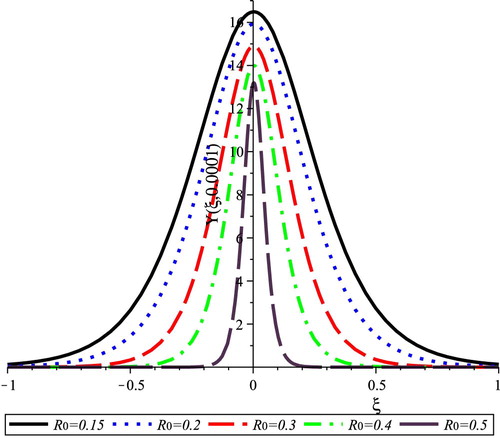
on the pressure wave is studied in Fig. 2. This figure shows that the fractional order of differentiation has a small effect only on the position of the wave peak. The initial radius of the blood-vessel
effect on the blood pressure wave is represented in Fig. 3, which shows that the increase of
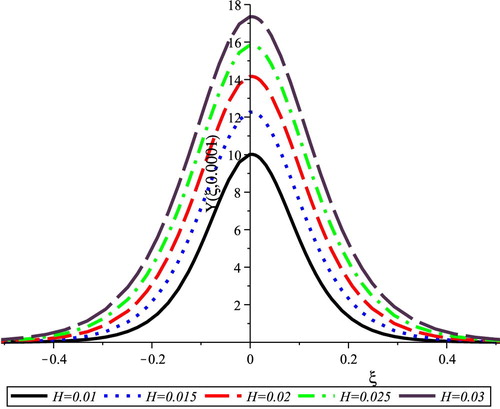
decreases both the amplitude and width of the pressure wave. In Fig. 4, the increase of the thickness of the blood-vessel wall
increases both of the amplitude and width of the blood pressure wave. The shear modulus of the blood-vessel wall material
effect on the blood pressure waves is given in Fig. 5. It is shown that the increase of
increases both the amplitude and width of the pressure wave. Figure 6 represents the effect of the final radius of the blood-vessel
on the pressure waves. The representation shows that the increase of
decreases the amplitude while it increases the width of the pressure wave.
The above calculations show that the blood-vessel characteristics modulate the shape of the pressure waves in the blood for both the amplitude and width while the fractional order of the evolution equation that describes the pressure wave propagation has a small effect on these waves.
Acknowledgements
All of the authors would like to pass their great thanks to their Professor S. A. El-Wakil, who is celebrating his Diamond Birthday, for his continuous encouragement, suggestions, and review of the work.
Notes
Dedicated to Prof. S. A. El-Wakil for his Diamond Birthday.
PACS: 47.53. + n; 05.30.Pr; 83.50.-v.
References
- T.J.PedleyFluid mechanics of large blood vessels1980Cambridge University PressCambridge
- K.RupA.DróżdżNumerical modeling of the pulse wave propagation in large blood vessels based on liquid and wall interactionJ Phys Conf Ser53012014012010
- A.FatimaZ.TajBehavior of viscoelastic fluid in presence of diffusion of chemically reactive speciesInt J Sci Eng Res582014487492
- A.J.RachevEffects of transmural pressure and muscular activity on pulse waves in arteriesJ Biomech Eng ASME1021980119123
- H.DemirayWave propagation through a viscous fluid contained in a pre-stressed thin elastic tubeInt J Eng Sci30199216071620
- Y.Y.ChoyK.G.TayC.T.OngNLS equation with variable coefficient in a stenosed elastic tube filled with an averaged inviscid fluidWorld Appl Sci J1642012622631
- K.AndoT.SanadaK.InabaJ.S.DamazoJ.E.ShepherdT.Coloniuset alShock propagation through a bubbly liquid in a deformable tubeJ Fluid Mech6712011339363
- Y.IkenagaS.NishiY.KomagataM.SaitoP.-Y.LagreeT.Asadaet alExperimental study on the pressure and pulse wave propagation in viscoelastic vessel tubes – effects of liquid viscosity and tube stiffnessIEEE Trans Ultrason Ferroelectr Freq Control6011201323812388
- Y.Y.ChoyK.G.TayC.T.OngModulation of nonlinear waves in an inviscid fluid (blood) contained in a stenosed arteryAppl Math Sci7101201350035012
- M.A.AbdouA.HendiH.K.AlanziNew exact solutions of KdV equation in an elastic tube filled with a variable viscosity fluidStud Nonlinear Sci3220126268
- T.K.GaikH.DemirayForced Korteweg-de Vries-Burgers equation in an elastic tube filled with a variable viscosity fluidChaos Soliton Fract384200811341145
- H.DemirayNonlinear wave modulation in a fluid-filled elastic tube with stenosisZ Naturforsch A63a20082434
- R.C.CascavalVariable coefficient KdV equations and waves in elastic tubesG.R.GoldsteinR.NagelS.RomanelliEvolution equations2003Marcel Dekker, Inc.New York, USA
- H.DemirayWeakly nonlinear waves in a fluid with variable viscosity contained in a pre-stressed thin elastic tubeChaos Soliton Fract3612008196202
- H.DemirayVariable coefficient modified KdV equation in fluid-filled elastic tubes with stenosisChaos soliton Fract4222009358364
- A.ElgarayhiE.K.El-ShewyA.A.MahmoudA.A.ElhakemPropagation of nonlinear pressure waves in bloodISRN Comput Biol20132013436267
- D.J.KortewegG.de VriesOn the change of form of long waves advancing in a rectangular canal and on a new type of long stationary wavesPhil Mag Ser 5392401892422443
- M.K.FungKdV equation as an Euler-Poincare equationChinese J Phys356II1997789796
- F.RieweNon-conservative Lagrangian and Hamiltonian mechanicsPhys Rev E532199618901899
- F.RieweMechanics with fractional derivativesPhys Rev E553199735813592
- K.S.MillerB.RossAn introduction to the fractional calculus and fractional differential equation1993John Wiley & Sons Inc.New York
- I.PodlubnyFractional differential equations1999Academic PressSan Diego
- A.A.KilbasH.M.SrivastavaJ.J.TrujilloTheory and applications of fractional differential equations2006Elsevier Science Inc.New York
- O.P.AgrawalFormulation of Euler-Lagrange equations for fractional variational problemsJ Math Anal Appl27212002368379
- O.P.AgrawalFractional variational calculus in terms of Riesz fractional derivativesJ Phys A Math Theor4024200762876303
- O.P.AgrawalA general finite element formulation for fractional variational problemsJ Math Anal Appl33712008112
- M.KlimikFractional sequential mechanics-models with symmetric fractional derivativeCzech J Phys5112200113481354
- N.HeymansFractional calculus description of non-linear viscoelastic behaviour of polymersNonlinear Dyn3812004221231
- J.SabatierO.P.AgrawalJ.A.Tenreiro MachadoAdvances in fractional calculus-theoretical developments and applications in physics and engineering2007SpringerDordrecht, Netherlands
- D.BaleanuS.I.MuslihLagrangian formulation of classical fields within Riemann-Liouville fractional derivativesPhys Scripta7212005119121
- E.M.RabeiS.I.MuslihD.BaleanuQuantization of fractional systems using WKB approximationCommun Nonlin Sci Numer Simul1542010807811
- V.E.TarasovG.M.ZaslavskyFractional Ginzburg-Landau equation for fractal mediaPhys A354152005249261
- S.BhalekarV.Daftardar-GejjiD.BaleanuR.MaginFractional Bloch equation with delayComput Math Appl615201113551365
- S.A.El-WakilE.M.AbulwafaE.K.El-ShewyA.A.MahmoudTime-fractional KdV equation for electron-acoustic waves in plasma of cold electron and two different temperature isothermal ionsAstrophys Space Sci33312011269276
- S.A.El-WakilE.M.AbulwafaE.K.El-ShewyA.A.MahmoudTime-fractional KdV equation for plasma of two different temperature electrons and stationary ionPhys Plasmas1892011092116
- G.AdomianA review of the decomposition method in applied mathematicsJ Math Anal Appl13521988501544
- H.JafariV.Daftardar-GejjiSolving a system of nonlinear fractional differential equations using Adomian decompositionJ Comp Appl Math19622006644651
- WangQ.Numerical solutions for fractional KdV-Burgers equation by Adomian decomposition methodAppl Math Comp1822200610481055
- H.FatoorehchiH.AbolghasemiA more realistic approach toward the differential equation governing the glass transition phenomenonIntermetallics3220133538
- H.FatoorehchiH.AbolghasemiR.RachM.AssarAn improved algorithm for calculation of the natural gas compressibility factor via the Hall-Yarborough equation of stateCan J Chem Eng9212201422112217
- H.FatoorehchiH.AbolghasemiR.RachAn accurate explicit form of the Hankinson-Thomas-Phillips correlation for prediction of the natural gas compressibility factorJ Petrol Sci Eng11720144653
- H.FatoorehchiH.AbolghasemiR.RachA new parametric algorithm for isothermal flash calculations by the Adomian decomposition of Michaelis-Menten type nonlinearitiesFluid Phase Equilibr395120154450
- S.MomaniZ.OdibatA.AlawnahVariational iteration method for solving the space- and time-fractional KdV equationNumer Method Part Differ Eq2412008262271
- WuG.-C.E.W.M.LeeFractional variational iteration method and its applicationPhys Let A37425201025062509
- S.A.El-WakilE.M.AbulwafaM.ZahranA.A.MahmoudTime-fractional KdV Equation: formulation and solution using variational methodsNonlinear Dyn651–220115563
- HeJ.-H.Approximate analytical solution for seepage flow with fractional derivatives in porous mediaComput Methods Appl Mech Eng1671–219985768
- R.Y.MolliqM.S.NooraniI.HashimVariational iteration method for fractional heat- and wave-like equationsNonlinear Anal Real World Appl103200918541869
- H.FatoorehchiH.AbolghasemiThe variational iteration method for theoretical investigation of falling film absorbersNatl Acad Sci Let38120156770
- HeJ.-H.Homotopy perturbation techniqueComput Methods Appl Mech Eng1781999157162
- HeJ.-H.A coupling method of homotopy technique and perturbation technique for nonlinear problemsInt J Nonlinear Mech35120003743
- H.WashimiT.TaniutiPropagation of ion-acoustic solitary waves of small amplitudePhys Rev Let17191966996997
- S.YomosaSolitary waves in large blood vesselsJ Phys Soc Jpn5621987506520
- H.DemiraySolitary waves in prestressed elastic tubesBull Math Biol5851996939955
Appendix A
Time-fractional KdV-equation formulation
The TFKdV equation in (1 + 1) dimension can be formulated as follows [Citation45]:
Using a potential function where
gives the potential equation of the regular KdV equation Equation(16)
(16)
(16) in the form
(A1)
(A1)
The functional of this equation can be represented by(A2)
(A2) where
,
, and
are unknown constants to be determined. Integrating this equation by parts where
gives
(A3)
(A3)
Taking the variation for the result with respect to leads to
,
,
.
So, the functional gives the Lagrangian of the potential equation as(A4)
(A4)
Similar to this form, the Lagrangian of the potential equation in the time-fractional domain can be written as(A5)
(A5)
where the left Riemann–Liouville fractional derivative is represented by [Citation21–Citation[22]Citation23]
(A6)
(A6)
The functional of the time-fractional potential equation can be represented in the form(A7)
(A7) where the time-fractional Lagrangian
is defined by (A5).
The variation of the functional with respect to leads to
(A8)
(A8)
Integrating the right-hand side of this equation by parts leads to(A9)
(A9)
This is done by taking the fractional integrating by parts formula [Citation21–Citation[22]Citation23](A10)
(A10) where the right Riemann–Liouville fractional derivative
is defined by [Citation21–Citation[22]Citation23]
(A11)
(A11)
Optimizing this variation of the functional , i.e.,
, gives the Euler–Lagrange equation for the time-fractional of the potential equation in the form
(A12)
(A12)
Substituting from the Lagrangian equation into this Euler–Lagrange formula gives(A13)
(A13)
Substituting for the potential function gives the time-fractional KdV equation for the state function
in the form
(A14)
(A14) where the fractional derivatives
and
are the left and right Riemann–Liouville fractional derivatives respectively.
Appendix B
Time-fractional KdV equation solution
The TFKdV equation represented by (18) can be solved using the VIM [Citation43–Citation[44]Citation[45]Citation[46]Citation[47]Citation48] as follows:
Affecting from left by the fractional operator on (18) leads to
(B1)
(B1)
Taking into account the following fractional derivative property [Citation21–Citation[22]Citation23](B2)
(B2)
The Riesz fractional derivative is considered as Riesz fractional integral
that is defined by [Citation21–Citation[22]Citation23]
(B3)
(B3)
The iterative correction functional of (B1) is given as(B4)
(B4) where the function
is considered as a restricted variation function, i.e.,
. The extreme of the variation of (B4) using the restricted variation function leads to
(B5)
(B5)
This relation leads to the stationary conditions and
, which leads to the Lagrangian multiplier as
. Therefore, the iterative correction functional has the form
(B6)
(B6)