
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
In this article, we established abundant traveling wave solutions for nonlinear evolution equations. The exp(–φ(η))-expansion method is used to construct traveling wave solutions for the generalized Zakharov–Kuznetsov–Benjamin–Bona–Mahony equation and Simplified Modified form of Camassa–Holm equation. The traveling wave solutions are expressed in terms of the hyperbolic functions, the trigonometric functions and the rational functions. The proposed solutions are found to be important for the explanation of some practical physical problems in mathematical physics and engineering.
1 Introduction
It is well known that seeking exact solutions [Citation1–Citation[2]Citation[3]Citation[4]Citation[5]Citation[6]Citation[7]Citation[11]Citation[12]Citation[13]Citation[15]Citation[16]Citation[17]Citation[18]Citation[19]Citation[20]Citation[21]Citation[22]Citation[23]Citation[24]Citation[25]Citation[26]Citation[27]Citation[28]Citation[29]Citation[30]Citation[31]Citation[32]Citation[33]Citation[34]Citation[35]Citation[36]Citation[37]Citation[38]Citation[39]Citation[40]Citation[41]Citation[42]Citation[43]Citation[44]Citation[45]Citation[46]Citation[47]Citation[48]Citation[49]Citation[50]Citation[51]Citation[52]Citation53] for nonlinear evolution equations (NLEES) plays an important role in mathematical physics. For instance, nonlinear evolution equations (NEEs) are widely used as models to describe complex physical phenomena in various fields of sciences, especially in fluid mechanics, solid-state physics, plasma physics, plasma waves and biology. One of the basic physical problems for those models is to obtain their travelling wave solutions. In particular, various methods have been utilized to explore different kinds of solutions of physical models described by nonlinear partial differential equations (NPDEs). In the past few decades or so, many effective methods have been presented, which contain the inverse scattering transform method, the Backlund transformation [Citation1], bilinear transformation, the tanh-sech method [Citation2], the extended tanh method, the pseudo-spectral method [Citation3,Citation8–Citation[9]Citation10,Citation14,Citation15], trial function and the sine-cosine method [Citation4,Citation5], Hirota method [Citation6], tanh-coth method [Citation2,Citation7,Citation11,Citation13], the exponential function method [Citation16–Citation[17]Citation[18]Citation[19]Citation[20]Citation[21]Citation[22]Citation[23]Citation24], the (G′/G)-expansion method [Citation25–Citation[26]Citation[27]Citation[28]Citation29], the homogeneous balance method [Citation30,Citation31], F-expansion method [Citation33–Citation[34]Citation35] and the Jacobi elliptic function expansion method [Citation36–Citation[37]Citation38] and so on. In a subsequent work, Ma et al. [Citation39] developed the complexiton solutions for Toda lattice equation through the Casoratian formulation and hence obtained a set of coupled conditions which guaranteed Casorati determinants to be the solution of Toda Lattice which consequently produced complexiton solutions. Moreover, Ma and You [Citation40] used variation of parameters for solving the involved non-homogeneous partial differential equations and obtained solution formulas helpful in constructing the existing solutions coupled with a number of other new solutions including rational solutions, solitons, positions, negatons, breathers, complexions and interaction solutions of the KdV equations. It is needed to be highlighted that the basic spirit of the exp-function method which is the conversion of nonlinear partial differential equations into integrable ordinary differential equations was explicitly presented and minutely analyzed in 1996 by Ma and Fuchssteiner [Citation41]. In fact, the exp-function method is restricted to produce rational solutions in the form of transformed variables and such solutions can be obtained easily by making use of other techniques including Wronskian and Casoratian [Citation41–Citation[42]Citation43]. Recently, Ma, Wu and He [Citation44] presented a much more general idea to yield exact solutions to nonlinear wave equations by searching for the so-called Frobenius transformations. Some recently developed methods, such as, the modified simple equation [Citation45–Citation[46]Citation[47]Citation49], the enhanced Exp(–φ(ξ))-expansion method [Citation50,Citation51], the Enhanced (G′/G)-Expansion method [Citation52,Citation53], etc. which provide useful exact solutions to NLEEs have been discussed.
The objective of this article is to apply the exp(–φ(η))-expansion method to construct the exact solutions for nonlinear evolution equations in mathematical physics via generalized Zakharov–Kuznetsov–Benjamin–Bona–Mahony equation and Simplified Modified form of Camassa–Holm equation. The subject matter of this method is that the traveling wave solutions of a nonlinear evolution equation can be expressed by a polynomial in exp(–φ(η)), where φ(η) satisfies the ordinary differential equation (ODE):(1)
(1)
Where η = x − Vt.
2 Description of exp(–φ(η))-expansion method
Now we explain the exp(–φ(η))-expansion method for finding traveling wave solutions of nonlinear evolution equations. Let us consider the general nonlinear partial differential equation of the form.(2)
(2)
where is an unknown function, P is a polynomial in
and its various partial derivatives, in which the highest order derivatives and nonlinear terms are involved. In order to solve Eq. Equation(2)
(2)
(2) by using the exp(–φ(η))-expansion method we have to follow the following steps.
Step 1. Combining the real variables x and t by a compound variable η we assume(3)
(3)
where V is the speed of the traveling wave. Using the traveling wave variable Equation(3)(3)
(3) , Eq. Equation(2)
(2)
(2) is reduced to the following ODE for
(4)
(4)
where Q is a function of and its derivatives, prime denotes derivative with respect to η.
Step 2. Suppose the solution of (4) can be expressed by a polynomial in exp(–φ(η)) as follows(5)
(5)
where and V are constants to determined later such that an ≠ 0 and
satisfies Eq. Equation(1)
(1)
(1) .
Step 3. By using the homogenous principal, we can evaluate the value of positive integer n between the highest order linear terms and nonlinear terms of the highest order in Eq. Equation(4)(4)
(4) . Our solutions now depend on the parameters involved in Eq. Equation(1)
(1)
(1) .
Case 1
λ2 − 4µ > 0 and µ ≠ 0,(6)
(6)
where c1 is a constant of integration.
Case 2
λ2 − 4µ < 0 and µ ≠ 0,(7)
(7)
Case 3
µ = 0 and λ ≠ 0,(8)
(8)
Case 4
, and µ ≠ 0,
(9)
(9)
Case 5
λ = 0, and µ = 0,(10)
(10)
Step 4. Substitute Eq. Equation(5)(5)
(5) into Eq. Equation(4)
(4)
(4) and using Eq. Equation(1)
(1)
(1) , the left hand side is converted into a polynomial in
. Equating each coefficient of this polynomial to zero, we obtain a set of algebraic equations for
.
Step 5. Eventually, solving the algebraic system of equations obtained in Step 4 by the use of Maple or Mathematica, we obtain the values of the constants and µ. Substituting
and the general solution of Eq. Equation(1)
(1)
(1) into solution of Eq. Equation(5)
(5)
(5) , we obtain some valuable traveling wave solutions of Eq. Equation(2)
(2)
(2) .
3 Solution procedure
3.1 Generalized Zakharov–Kuznetsov–Benjamin–Bona–Mahony equation
Let us consider the generalized Zakharov–Kuznetsov–Benjamin–Bona–Mahony equation.(11)
(11)
where a and b are some nonzero parameters. We utilize the traveling wave variable ,
, we can convert Eq. Equation(11)
(11)
(11) into an ordinary differential equation.
(12)
(12)
where the prime denotes the derivative with respect to η. Now integrating Eq. Equation(12)(12)
(12) we have,
(13)
(13)
Balancing the u'' and u2 by using homogenous principal, we have
Then the trial solution of Eq. Equation(12)(12)
(12) can be expressed as follows,
(14)
(14)
where α1 ≠ 0 and α0 is a constant to determined, while λ, µ are arbitrary constants.
Substituting into Eq. Equation(13)
(13)
(13) and then equating the coefficients of
to zero, we get
(15)
(15)
Solving the set of algebraic equations, we obtain the following solution.
where λ and µ are arbitrary constants. Now substituting the values into Eq. Equation(14)(14)
(14) , we obtain
(16)
(16)
where . Now substituting Eq. Equation(6)
(6)
(6) to Eq. Equation(10)
(10)
(10) into Eq. Equation(16)
(16)
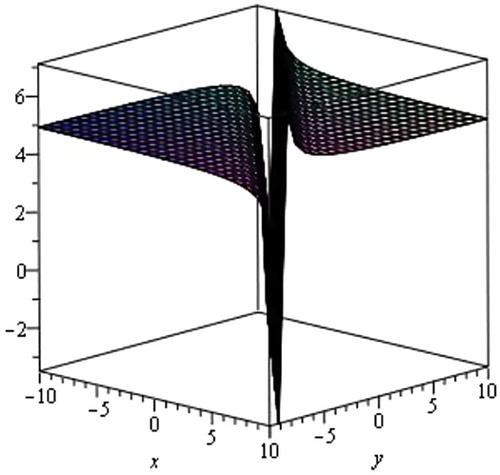
(16) respectively, we get the following five traveling wave solutions of generalized Zakharov–Kuznetsov–Benjamin–Bona–Mahony equation.
Case 1
When λ2 − 4µ > 0 and µ ≠ 0, we obtain the hyperbolic function traveling wave solution.
where η = x + y − Vt and where c1 is an arbitrary constant.
Case 2
When λ2 − 4µ < 0 and µ ≠ 0, we obtain trigonometric solution.
where η = x + y − Vt and where c1 is an arbitrary constant.
Case 3
When µ = 0 and λ ≠ 0, we obtain exponential solution.
where η = x + y − Vt and where c1 is an arbitrary constant.
Case 4
When and µ ≠ 0, we obtain rational function solution.
where η = x + y − Vt and where c1 is an arbitrary constant.
Case 5
When λ = 0, and µ = 0, we obtain rational function solution.
where η = x + y − Vt and where c1 is an arbitrary constant.
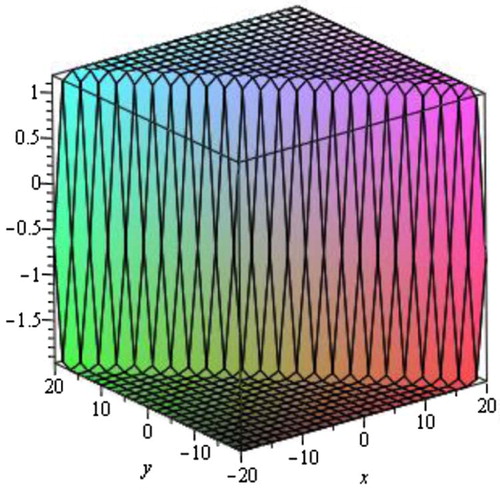
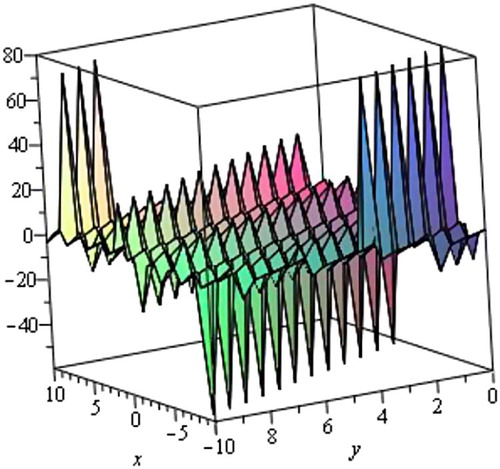
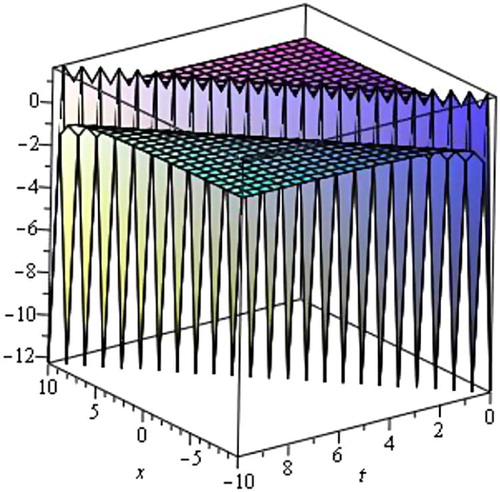
Graphical representation of the solutions:
The graphical illustrations of the solutions are given below in the figures with the aid of Maple (Figs. 1–Fig. 2Fig. 3Fig. 45).
3.2 Simplified Modified form of Camassa–Holm equation
Let us consider Simplified Modified form of Camassa–Holm equation.(17)
(17)
where β and δ are some nonzero parameters.
We utilize the traveling wave variable, η = x − Vt, we can convert Eq. Equation(17)
(17)
(17) into an ordinary differential equation.
(18)
(18)
where the prime denotes the derivative with respect to η.
Now integrating Eq. Equation(18)(18)
(18) we have,
(19)
(19)
Balancing the u' and u2 by using homogenous principal, we have
Then the trial solution of Eq. Equation(18)(18)
(18) can be expressed as follows,
(20)
(20)
where α1 ≠ 0, α0 is a constant to determined, while λ, µ are arbitrary constants.
Substituting into Eq. Equation(19)
(19)
(19) and then equating the coefficients of
to zero, we get
(21)
(21)
Solving the set of algebraic equations, we obtain the following solution.
where λ and µ are arbitrary constants.
Now substituting the values into Eq. Equation(20)(20)
(20) , we obtain,
(22)
(22)
Where η = x − Vt.
Now substituting Eq. Equation(6)(6)
(6) to Eq. Equation(10)
(10)
(10) into Eq. Equation(22)
(22)
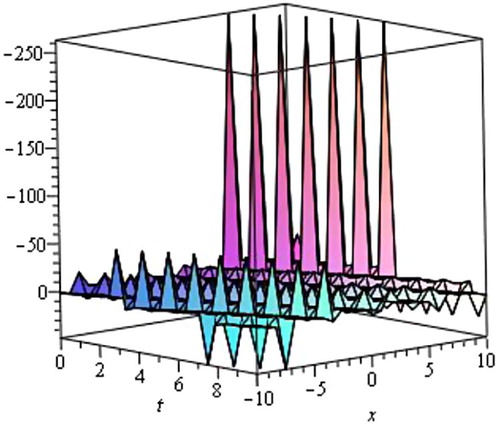
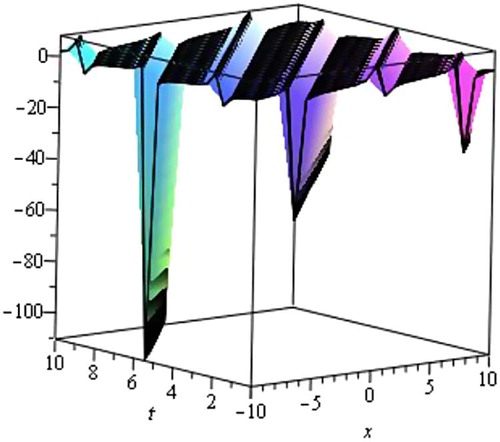
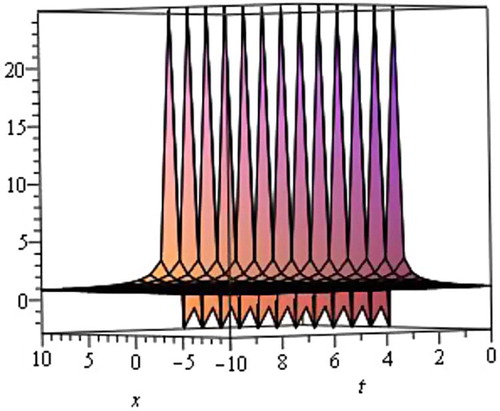
(22) respectively, we get the following five traveling wave solutions of the Simplified Modified form of Camassa–Holm equation.
Case 1
When λ2 − 4µ > 0 and µ ≠ 0, we obtain the hyperbolic function traveling wave solution.
where η = x − Vt and where c1 is an arbitrary constant.
Case 2
When λ2 − 4µ < 0 and µ ≠ 0, we obtain trigonometric solution.
where η = x − Vt and where c1 is an arbitrary constant.
Case 3
When µ = 0 and λ ≠ 0, we obtain exponential solution.
where η = x − Vt and where c1 is an arbitrary constant.
Case 4
When , and µ ≠ 0, we obtain rational function solution.
where η = x − Vt and where c1 is an arbitrary constant.
Case 5
when λ = 0, and µ = 0, we obtain rational function solution.
where η = x − Vt and where c1 is an arbitrary constant.
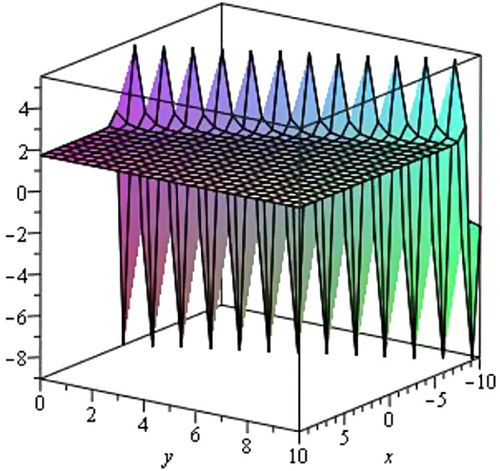
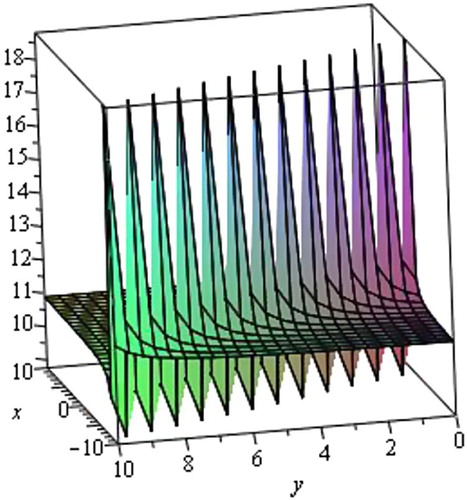
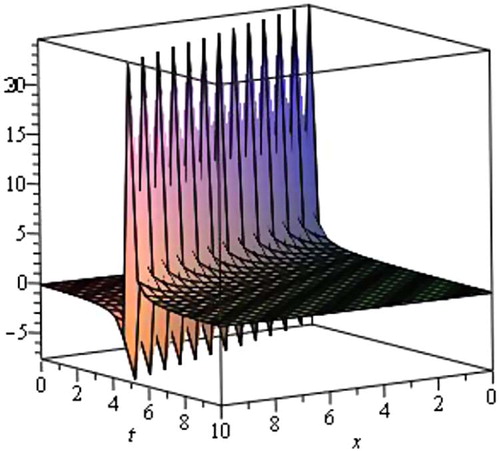
Graphical representation of the solutions:
The graphical illustrations of the solutions are given below in the figures with the aid of Maple (Figs. 6–Fig. 7Fig. 8Fig. 910).
Conclusions: The -expansion method is very important in finding the exact solutions of nonlinear evolution equations. In this article, we have successfully formulated the exact and traveling wave solutions to the generalized Zakharov–Kuznetsov–Benjamin–Bona–Mahony equation and Simplified Modified form of Camassa–Holm equation. The wave solutions are obtained through the hyperbolic, trigonometric, exponential and rational functions. The calculation procedure is simple, direct and constructive. This study shows that the method is quite efficient and much effective for finding exact solutions of nonlinear evolution equations (NLEEs). Also, we observe that the method is straightforward and can be applied to many other nonlinear evolution equations.
References
- M.J.AblowitzP.A.ClarksonSolitons, nonlinear evolution equations and inverse scattering1991Cambridge University PressNew York
- A.M.WazwazThe tanh-method for traveling wave solutions of nonlinear equationsAppl Math Comput1542004713723
- P.RosenauJ.M.HymanCompactons: solitons with finite wavelengthsPhys Rev Lett701993564567
- A.M.WazwazAn analytic study of compactons structures in a class of nonlinear dispersive equationsMath Comput Simul6320033544
- A.M.WazwazA sine–cosine method for handling nonlinear wave equationsMath Comput Model402004499508
- R.HirotaExact solutions of the Korteweg-de-Vries equation for multiple collisions of solitonsPhys Lett A27197111921194
- W.MalflietW.HeremanThe tanh method: exact solutions of nonlinear evolution and wave equationsPhys Scr541996563568
- M.A.AbdouThe extended tanh method and its applications for solving nonlinear physical modelsAppl Math Comput1902007988996
- S.A.El-WakilM.A.AbdouNew exact traveling wave solutions using modified extended tanh-function methodChaos Solit Fract312007840852
- FanE.G.Extended tanh-function method and its applications to nonlinear equationsPhys Lett A2772000212218
- A.M.WazwazThe tanh-method for traveling wave solutions of nonlinear wave equationsAppl Math Comput187200711311142
- E.M.E.ZayedH.M.Abdel RahmanThe extended tanh-method for finding traveling wave solutions of nonlinear PDEsNonlin Sci Lett A122010193200
- E.M.E.ZayedH.M.Abdel RahmanThe tanh-function method using a generalized wave transformation for nonlinear equationsInt J Nonlin Sci Numer Simul112010595601
- A.M.WazwazThe extended tanh-method for new compact and non-compact solutions for the KP–BBM and the ZK–BBM equationsChaos Solit Fract38200815051516
- M.Yaghobi MoghaddamA.AsgariH.YazdaniExact travelling wave solutions for the generalized nonlinear Schrödinger (GNLS) equation with a source by extended tanh-coth, sine-cosine and exp-function methodsAppl Math Comput2102009422435
- S.T.Mohyud-DinSolution of nonlinear differential equations by exp-function methodWorld Appl Sci J72009116147
- WuH.X.HeJ.H.Exp-function method and its application to nonlinear equationsChaos Solit Fract302006700708
- WuX.H.HeJ.H.Solitary solutions, periodic solutions and compacton like solutions using the exp-function methodComput Math Appl542007966986
- M.A.AbdouA.A.SolimanS.T.BasyonyNew application of exp-function method for improved Boussinesq equationPhys Lett A3692007469475
- A.BekirA.BozExact solutions for nonlinear evolution equation using exp-function methodPhys Lett A372200816191625
- WuX.H.HeJ.H.Exp-function method and its application to nonlinear equationsChaos Solit Fract382008903910
- M.A.NoorS.T.Mohyud-DinA.WaheedExp-function method for solving Kuramoto–Sivashinsky and Boussinesq equationsJ Appl Math Comput29200811310.1007/s12190-008-0083-y
- H.NaherF.A.AbdullahM.A.AkbarNew travelling wave solutions of the higher dimensional nonlinear partial differential equation by the exp-function methodJ Appl Math142012
- ZhuS.D.Exp-function method for the discrete m KdV latticeInt J Nonlin Sci Numer Simul82007465469
- WangM.LiX.ZhangJ.The (G′/G)-expansion method and travelling wave solutions of nonlinear evolution equations in mathematical physicsPhys Lett A3722008417423
- G.EbadiA.BiswasThe (G′/G)-expansion method and topological soliton solution of the K(m,n) equationCommun Nonlinear Sci Numer Simulat16201123772382
- E.M.E.ZayedK.A.GepreelThe (G′/G)-expansion method for finding traveling wave solutions of nonlinear partial differential equations in mathematical physicsJ Math Phys5020091350213512
- E.M.E.ZayedM.A.S.EL-MalkyThe extended (G′/G)-expansion method and its applications for solving the (3+1)-dimensional nonlinear evolution equations in mathematical physcisGlob J Sci Front Res112011
- M.EkiciD.DuranA.SonmezogluConstructing of exact solutions to the (2+1)-dimensional breaking soliton equations by the multiple (G′/G)-expansion methodJ Adv Math Stud720142744
- FanE.ZhangH.A note on the homogeneous balance methodPhys Lett A2461998403406
- WangM.Solitary wave solutions for variant Boussinesq equationsPhys Lett A1991995169172
- ChenH.T.ZhangH.Q.New double periodic and multiple soliton solutions of the generalized (2 + 1)-dimensional Boussinesq equationChaos Solit Fract202004765769
- A.EbaidE.H.AlyExact solutions for the transformed reduced Ostrovsky equation via the F-expansion method in terms of Weierstrass-elliptic and Jacobian-elliptic functionsWave Motion492012296308
- A.FilizM.EkiciA.SonmezogluF-expansion method and new exact solutions of the SchrÄodinger-KdV equationSci World J20142014 Article ID 534063
- M.A.AbdouThe extended F-expansion method and its applications for a class of nonlinear evolution equationsChaos Solit Fract31200795104
- DaiC.Q.ZhangJ.F.Jacobian elliptic function method for nonlinear differential–difference equationsChaos Solit Fract27200610421047
- LiuD.Jacobi elliptic function solutions for two variant Boussinesq equationsChaos Solit Fract24200513731385
- ChenY.WangQ.Extended Jacobi elliptic function rational expansion method and abundant families of Jacobi elliptic functions solutions to (1+1)-dimensional dispersive long wave equationChaos Solit Fract242005745757
- MaW.X.K.MarunoComplexiton solutions of the Toda lattice equationPhys A3432004219237
- MaW.X.ZhouD.T.Explicit exact solution of a generalized KdV equationActa Math Sci171997168174
- MaW.X.YouY.Solving the Korteweg-de Vries equation by its bilinear form: wronskian solutionsTrans Am Math Soc357200417531778
- MaW.X.YouY.Rational solutions of the Toda lattice equation in Casoratian formChaos Solitons Fractals222004395406
- MaW.X.B.FuchssteinerExplicit and exact solutions of Kolmogorov–PetrovskII–Piskunov equationInt J Nonlin Mech3131996329338
- MaW.X.WuH.Y.HeJ.S.Partial differential equations possessing Frobenius integrable decompositionsPhys Lett A36420072932
- K.KhanM.A.AkbarExact and solitary wave solutions for the Tzitzeica–Dodd–Bullough and the modified KdV–Zakharov–Kuznetsov equations using the modified simple equation methodAin Shams Eng J442013903909
- K.KhanM.A.AkbarTraveling wave solutions of the (2+ 1)-dimensional Zoomeron equation and the Burgers equations via the MSE method and the exp-function methodAin Shams Eng J512014247256
- K.KhanM.A.AkbarM.N.AlamTraveling wave solutions of the nonlinear Drinfel'd–Sokolov–Wilson equation and modified Benjamin–Bona–Mahony equationsJ Egyp Math Soc2132013233240
- K.KhanM.A.AkbarExact solutions of the (2+ 1)-dimensional cubic Klein–Gordon equation and the (3+ 1)-dimensional Zakharov–Kuznetsov equation using the modified simple equation methodJ Assoc Arab Uni Basic Appl Sci1520147481
- M.T.AhmedK.KhanM.A.AkbarStudy of nonlinear evolution equations to construct traveling wave solutions via modified simple equation methodPhy Rev Res Int342013490503
- K.KhanM.A.AkbarApplication of Exp(–φ(η))-expansion method to find the exact solutions of Modified Benjamin–Bona-Mahony equationWorld Appl Sci J2410201313731377
- S.AkhtetH.RoshidM.N.AlamN.RahmanK.KhanM.A.AkbarApplication of exp(–φ(η))-expansion method to find the exact solutions of nonlinear evolution equationsIOSR-JM962014106113
- K.KhanM.A.AkbarExact traveling wave solutions of nonlinear evolution equation via enhanced (G′/G)-expansion methodBr J Math Comp Sci410201413181334
- K.KhanM.A.AkbarTraveling wave solutions of nonlinear evolution equations via the enhanced (G′/G)-expansion methodJ Egyp Math Soc2222014220226