
Abstract
In this work, the exact traveling wave solutions of the generalized Fisher’s equation and modified equal width equation are studied by using the -expansion method. As a result, many solitary wave solutions are derived from the solutions via hyperbolic functions, trigonometric functions and rational functions. When the parameters were taken at special values, the results obtained were compared with the solution via the tanh method established earlier. In fact, many general non-traveling wave solutions are obtained. The efficiency of the method is demonstrated by applying it for a variety of selected equations.
1 Introduction
In recent years, the exact solution of non-linear partial differential equations has been investigated by many authors (Krisnangkura et al., Citation2012; Wazwaz, Citation2004, Citation2006; Shi et al., Citation2012; Jabbari and Kheiri, Citation2010; Lee and Sakthivel, Citation2010a,Citationb, Citation2011a,Citationb, Citation2012; Parand and Rad, Citation2012; Elboree, Citation2012a,Citationb; Abdel Rady et al., Citation2012; Honga and Lub, Citation2012; Abbasbandy and Shirzadi, Citation2010; Taghizadeh et al., Citation2012; Babolian and Dastani, Citation2012; Kafash et al., Citation2013; Mu and Ye, Citation2011; Ebadi and Biswas, Citation2010a,Citationb; Kim and Sakthivel, Citation2010, Citation2011; Malik et al., Citation2010, Citation2012; Kabir et al., Citation2011; Feng et al., Citation2011; Jabbari et al., Citation2011; Ayhan and Bekir, Citation2012; Naher and Abdullah, Citation2012; Kraenkel et al., Citation2013; Taha and Noorani, Citation2013; Taha et al., Citation2013; Wang et al., Citation2008"), who are interested in non-linear physical phenomena in various fields of physics and engineering. Many powerful methods have been presented such as the tanh-method (Krisnangkura et al., Citation2012; Wazwaz, Citation2004"), sine–cosine method (Shi et al., Citation2012; Wazwaz, Citation2006"), tanh–coth method (Jabbari and Kheiri, Citation2010; Lee and Sakthivel, Citation2012, Citation2011a"), exp-function method (Lee and Sakthivel, Citation2010a, Citation2011b; Parand and Rad, Citation2012"), homogeneous-balance method (Elboree, Citation2012a; Abdel Rady et al., Citation2012"), Jacobi-elliptic function method (Honga and Lub, Citation2012; Lee and Sakthivel, Citation2010b"), first-integral method (Abbasbandy and Shirzadi, Citation2010; Taghizadeh et al., Citation2012"), similarity reduction method (Jie–Fang et al., Citation2013; Dai et al., Citation2012, Citation2010"), also many numerical method applied to solve nonlinear partial differential equations like homotopy perturbation method (Babolian and Dastani, Citation2012), variational iteration method (Kafash et al., Citation2013), finite volume method (Mu and Ye, Citation2011) and so on.
Figure 1 3D Graphs of a kink solution of (a) Eq. Equation(33)(33) when + sign is taken and (b) Eq. Equation(33)
(33) when −ve sign is taken.
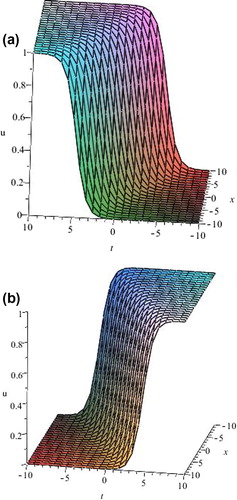
Figure 2 3D plot of Eq. Equation(35)(35) .
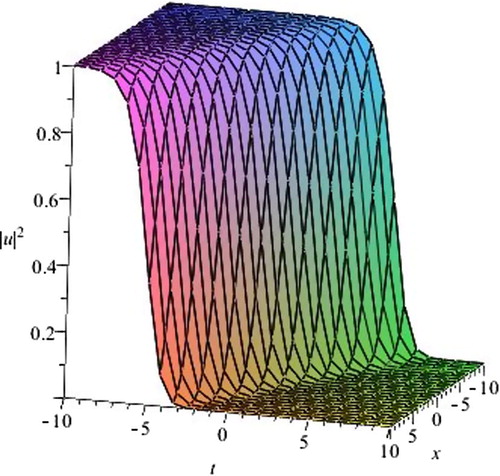
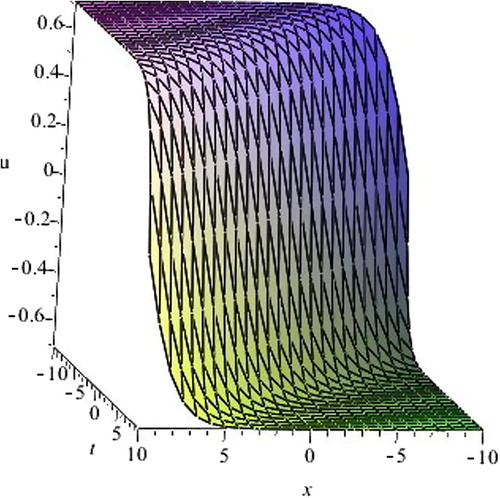
Figure 3 3D plot of Eq. Equation(18)(18) .
The objective of this paper is to use a powerful method which is called the -expansion method (Ebadi and Biswas, Citation2010a,Citationb; Kim and Sakthivel, Citation2010, Citation2011; Malik et al., Citation2010; Kabir et al., Citation2011; Feng et al., Citation2011; Jabbari et al., Citation2011; Ayhan and Bekir, Citation2012; Malik et al., Citation2012; Naher and Abdullah, Citation2012; Elboree, Citation2012b; Kraenkel et al., Citation2013; Taha and Noorani, Citation2013; Taha et al., Citation2013"), to obtain traveling wave solutions of such equations. The main ideas are that the traveling wave solutions of a non-linear equation can be expressed by a polynomial in
, where G = G(ζ) satisfies the second order linear ordinary differential equation: G″(ζ) + λG′(ζ) + μ G(ζ) = 0 , where ζ = x − ct and λ, μ,c are constants. The degree of this polynomial can be determined by considering the homogeneous balance between the highest order derivative and non-linear terms appearing in the given non-linear equations. The coefficients of the polynomial λ, μ, and c can be obtained by solving a set of algebraic equations resulting from the process of using the proposed method (Wang et al., Citation2008). Solitary wave solutions have been found to many nonlinear evolution equations and play a very important role in various areas of applied mathematics and theoretical physics (Antonova and Biswas, Citation2009; Biswas, Citation2009, Citation2010, Citation2011; Girgis et al., Citation2010; Krishnan et al., Citation2011; Girgis and Biswas, Citation2011; Krishnan et al., Citation2012; Razborova et al., Citation2013").
In this paper, the traveling wave solutions obtained via this method are expressed by hyperbolic functions, the trigonometric functions and the rational functions. In addition the solitary wave solutions are obtained from the generalized Fisher’s equation and modified equal width equation when the choice of parameters are taken at special values. Fisher’s equation is a partial differential equation introduced by Fisher in 1937. Fisher’s equation describes the process of interaction between diffusion and reaction, and this equation is encountered in chemical kinetics and population dynamics (Wazwaz, Citation2009). The modified equal width equation (MEW) is a non-linear partial differential equation which was introduced by Morrison and Meiss (Morrison et al., Citation1984). The wide applicability of these equations is the main reason why many mathematicians have used them (Cheng and Liew, Citation2012).
2 Summary of the -expansion method
-expansion method
In this section, we describe the -expansion method for finding traveling wave solutions of NLPDE. Suppose that a nonlinear partial differential equation, say in two independent variables x and t, is given by.
(1) where u = u(x,t) is an unknown function, P is a polynomial in u = u(x,t) and its various partial derivatives, in which highest order derivatives and nonlinear terms are involved.
The summary of the -expansion method, can be presented in the following six steps:
- Step 1:
To find the traveling wave solutions of Eq. Equation(1)
- Step 2:
If necessary we integrate Eq. Equation(3)
- Step 3:
We suppose the solution of nonlinear partial differential equation can be expressed by a polynomial in
- Step 4:
The positive integer m can be accomplished by considering the homogeneous balance between the highest order derivatives and nonlinear terms appearing in Eq. Equation(3)
- Step 5:
Substituting Eq. Equation(4)
- Step 6:
Substitute ai, c, λ and μ obtained in step 5 and the general solutions of Eq. Equation(5)
The advantages of the approach taken in this paper are as follows:
- •
It will be more important to seek solutions of higher-order nonlinear equations which can be reduced to ODEs of the order greater than 3.
- •
In the
- •
The general solution obtained by
- •
Finally, the solution procedure can be easily implemented in Mathematica or Maple.
3 Application the -expansion method
3.1 Modified equal width equation
In this section, we apply the -expansion method to solve the modified equal width equation. First, consider the modified equal width equation in the forms (Wazwaz, Citation2006).
(8) Using the wave transformation u(x,t) = u(ζ),ζ = x − ct. The following equation is obtained
(9) Integrating the equation and neglecting the constant of integration. Equation(9)
(9) becomes
(10) Considering the homogeneous balance between the highest order derivative and the non-linear term, then 3m = m + 2 gives m = 1 therefore, the solution of Equation(10)
(10) can be written in the form
(11) by Eqs. Equation(5)
(5) and Equation(11)
(11) we drive
(12)
(13) Substituting Equation(12)
(12) and Equation(13)
(13) into Equation(10)
(10) , collecting all terms with the same powers of
and setting each coefficient to zero, we obtain a system of algebraic equations for a0,a1,c, λ and μ as follows.
solving this system by Maple gives
(14) λ, b, c and a are arbitrary constants. Substituting the solution set Equation(14)
(14) into Equation(11)
(11) , the solution formulae of Eq. Equation(10)
(10) can be written as
(15)
Substituting the general solutions of second order linear ODE in to Equation(15)(15) gives three types of traveling wave solutions.
Case a. When λ2 − 4μ > 0, we obtain the hyperbolic function traveling wave solution(16)
(17) c1 and c2 are arbitrary constants. On the other hand, assuming c1 = 0 and c2 ≠ 0, the traveling wave solution of Equation(17)
(17) can be written as.
(18) assuming c2 = 0 and c1 ≠ 0, then we obtain
(19) where ζ = x − ct.
Case b. When λ2 − 4μ < 0, we obtain the trigonometric function traveling wave solutions(20)
(21) Also, if assume c1 = 0 and c2 ≠ 0, then
(22) and when c2 = 0,c1 ≠ 0, the solution of Eq. Equation(21)
(21) will be
(23) where ζ = x − ct.
Case c. When λ2 − 4μ = 0, we obtain the rational function solutions(24)
(25) where ζ = x − ct.
For the comparison between our solution and that of Wazwaz as given in Wazwaz (Citation2006), first we assume and then
we get the same as that of Wazwaz (Citation2006) (see ).
Table 1 Comparison of our solutions with Wazwaz solutions.
3.2 Generalized Fisher’s equation
In this section, we study generalized Fisher’s equation (Wazwaz, Citation2004)(26)
To solve the above generalized fisher’s equation by using the -expansion method, we use the transformations u(x,t) = u(ζ) with wave variable ζ = k(x − ct), the system Equation(26)
(26) is carried to a system of ODEs
(27)
According to the previous steps, using the balancing procedure between u3 and u″ in Equation(27)(27) we get m = 1. The solution of Equation(27)
(27) can be expressed by a polynomial in
as follows
(28)
On substituting Equation(28)(28) into ODEs Equation(27)
(27) , collecting all terms with the same powers of
and setting each cofficient to zero, we obtain the following system of algebraic equations
by using Maple, we get
(29) k and μ are arbitrary constants, substituting Equation(29)
(29) into Equation(28)
(28) the solution formulae of Equation(26)
(26) could be written:
(30) where ζ = k(x − ct) = kx.
(31) where
.
(32) where
.
Substituting general solution of Equation(5)(5) into (30)–(32) three types of traveling wave solutions of the generalized Fisher’s equations are obtained.
Hyperbolic function solutions
When λ2 − 4μ > 0, substituting the general solution of Equation(5)(5) into (30)–(32), we obtain the following traveling wave solution of Equation(26)
(26) :
where ζ = kx.
where
.
where
and c2 are arbitrary constants.
The various known results can be rediscovered, if c1 and c2 are taken as special values. For example:
If c2 = 0,c1 ≠ 0 and k = 1(33) On the other hand, if c1 = 0,c2 ≠ 0 and k = 1, the traveling wave solution can be written as
(34) where Equation(33)
(33) and Equation(34)
(34) are the same as the result obtained by the tanh method (Wazwaz, Citation2004).
Trigonometric function solutions
When λ2 − 4μ < 0, then we havewhere ζ = kx.
where
.
where
.
If c2 = 0 and k = 1, then u(ζ) becomes(35) If c1 = 0 and k = 1, the traveling wave solution can be written as
(36)
Rational function solution
When λ2 − 4 = 0, then(37) This solution is the exact same solution obtained byWazwaz’s (Wazwaz, Citation2004) see .
Table 2 Comparison of our solutions with Wazwaz solutions.
3.3 Graphical representations of the solutions
The graphical illustrations of the solutions are described in – with the aid of Maple. All solutions appear as kink wave solution (depending upon the choice of sign).
4 Conclusion
In this paper, we obtain the traveling wave solutions of generalized Fisher’s equation and modified equal width equation by using the -expansion method. We have seen that three types of traveling wave solutions were successfully found, in terms of hyperbolic, trigonometric and rational functions. Also comparison was made between the solution of the
-expansion method and the tanh method under special conditions. The solution of the
-expansion method is exactly the same as the solution of the tanh method. In our opinion the
-expansion method is more efficient from the tanh method. Moreover, the tanh method may give more than one soliton solution. But, the
-expansion method gives many-soliton solutions for nonlinear partial differential equations, this means the tanh method does not have this capability. Also, the solutions contain free parameters. These solutions will be very useful in various physical situations where these equations arise. We have noted that the
-expansion method changes the given difficult problems into simple problems which can be solved easily. We hope that they will be helpful for further studies in applied sciences.
Notes
Peer review under responsibility of University of Bahrain.
References
- S.AbbasbandyA.ShirzadiThe first integral method for modified Benjamin–Bona–Mahony equationCommunications in Nonlinear Science and Numerical Simulation15201017591764
- A.S.Abdel RadyE.S.OsmanM.KhalfallahOn soliton solutions of the (2+1) dimensional Boussinesq equationApplied Mathematics and Computation219201234143419
- M.AntonovaA.BiswasAdiabatic parameter dynamics of perturbed solitary wavesCommunications in Nonlinear Science and Numerical Simulation142009734748
- B.AyhanA.BekirThe -expansion method for the nonlinear lattice equationsCommunications in Nonlinear Science and Numerical Simulation17201234903498
- E.BabolianN.DastaniHes homotopy perturbation method: an effective tool for solving a nonlinear system of two-dimensional Volterra–Fredholm integral equationsMathematical and Computer Modelling55201212331244
- A.BiswasSolitary wave solution for KdV equation with power-law nonlinearity and time-dependent coefficientsNonlinear Dynamics582009345348
- A.BiswasSolitary waves for power-law regularized long-wave equation and R(m, n) equationNonlinear Dynamics592010423426
- A.BiswasA.H.KaraConservation laws for regularized long wave equation and R(m, n) equationAdvanced Science Letters42011168170
- R.J.ChengK.M.LiewAnalyzing modified equal width (MEW) wave equation using the improve element free Galerkin methodEngineering Analysis with Boundary Elements36201213221330
- C.DaiY.WangJ.ZhangAnalytical spatiotemporal localizations for the generalized (3+1)-dimensional nonlinear Schrdinger equationOptics Letters35201014371439
- C.-Q.DaiY.-Y.WangQ.TianJ.-F.ZhangThe management and containment of self-similar rogue waves in the inhomogeneous nonlinear Schrdinger equationAnnals of Physics3272012512521
- G.EbadiA.BiswasTravelling wave solutions for time-delayed nonlinear evolution equationsJournal of the Franklin Institute347201013911398
- G.EbadiA.BiswasApplication of the -expansion method for nonlinear diffusion equation swith nonlinear sourceJournal of the Franklin Institute347201013911398
- M.K.ElboreeNew soliton solutions for a Kadomtsev–Petviashvili (KP) like equation coupled to a Schrödinger equationApplied Mathematics and Computation218201259665973
- M.K.ElboreeHyperbolic and trigonometric solutions for some nonlinear evolution equationsCommunications in Nonlinear Science and Numerical Simulation17201240854096
- J.FengW.LiQ.WanUsing -expansion method to seek the traveling wave solution of Kolmogorov–Petrovskii–Piskunov equationApplied Mathematics and Computation217201158605865
- L.GirgisE.ZerradA.BiswasSolitary wave solutions of the peregrine equationInternational Journal of Oceans and Oceanography420104554
- L.GirgisA.BiswasA study of solitary waves by He’s semi-inverse variational principleWaves in Random and Complex Media21201196104
- B.HongaD.LubNew Jacobi elliptic function-like solutions for the general KdV equation with variable coefficientsMathematical and Computer Modelling55201215941600
- A.JabbariH.KheiriNew exact travelling wave solutions for the Kawahara and modified Kawahara equations by using modified tanh–coth methodActa Universitatis Apulensis2320102138
- A.JabbariH.KheiriA.BekirExact solutions of the coupled Higgs equation and the Maccari system using Hes semi-inverse method and -expansion methodComputers and Mathematics with Applications62201121772186
- Z.Jie-FangJ.Mei-ZhenH.Ji-DaL.Ji-HuiD.Chao-QingDynamics of optical rogue waves in inhomogeneous nonlinear waveguidesChinese Physics BB222013 054208–5
- M.M.KabirA.BorhanifarR.AbazariApplication of -expansion method to Regularized Long Wave (RLW) equationComputers and Mathematics with Applications61201120442047
- B.KafashA.DelavarkhalafiS.M.KarbassiApplication of variational iteration method for Hamilton–Jacobi–Bellman equationsApplied Mathematical Modelling37201339173928
- H.KimR.SakthivelTravelling wave solutions for time-delayed nonlinear evolution equationsApplied Mathematics Letters232010527532
- H.KimR.SakthivelExact solution of Wick-type stochastic equations with variable coefficientsReports on Mathematical Physics672011415429
- R.A.KraenkelK.ManikandanM.SenthilvelanOn certain new exact solutions of a diffusive predator–prey systemCommunications in Nonlinear Science and Numerical Simulation18201312691274
- E.V.KrishnanH.TrikiM.LabidiA.BiswasA study of shallow water waves with Gardner’s equationNonlinear Dynamics662011497507
- E.V.KrishnanS.KumarA.BiswasSolitons and other nonlinear waves of the Boussinesq equationNonlinear Dynamics70201212131221
- M.KrisnangkuraS.ChinviriyasitW.ChinviriyasitAnalytic study of the generalized Burgers–Huxley equation by hyperbolic tangent methodApplied Mathematics and Computation218201210,84310,847
- J.LeeR.SakthivelTravelling wave solutions for (N+1)-dimensional nonlinear evolution equationsPRAMANA-Journal of Physics752010565578
- J.LeeR.SakthivelExact traveling wave solutions of a higher-dimensional nonlinear evolution equationModern Physics Letters B24201010111021
- J.LeeR.SakthivelNew exact travelling wave solutions of bidirectional wave equationsPRAMANA-Journal of Physics762011819829
- J.LeeR.SakthivelExact travelling wave solutions of the Schamel–Korteweg de Vries equationReports on Mathematical Physics682011153161
- J.LeeR.SakthivelExact travelling wave solutions for some nonlinear (N+1)-dimensional evolution equationsComputational and Applied Mathematics312012219243
- A.MalikF.ChandS.C.MishraExact travelling wave solutions of some nonlinear equations by -expansion methodApplied Mathematics and Computation216201025962612
- A.MalikF.ChandH.KumarS.C.MishraExact solutions of the Bogoyavlenskii equation using the multiple -expansion methodComputers and Mathematics with Applications64201228502859
- P.J.MorrisonJ.D.MeissJ.R.CareyScattering of regularized long-wave solitary wavesPhysica11D1984324336
- L.MuX.YeA finite volume method for solving Navier–Stokes problemsNonlinear Analysis74201166866695
- H.NaherF.A.AbdullahSome new traveling wave solutions of the nonlinear reaction diffusion equation by using the improved -expansion methodMathematical Problems in Engineering201217 pages Article ID 871724
- K.ParandJ.A.RadExp-function method for some nonlinear pde’s and a nonlinear ode’sJournal of King Saud University-Science242012110
- P.RazborovaH.TrikiA.BiswasPerturbation of dispersive shallow water wavesOcean Engineering63201317
- Q.ShiQ.XiaoX.LiuExtended wave solutions for a nonlinear Klein–Gordon–Zakharov systemApplied Mathematics and Computation218201299229929
- N.TaghizadehM.MirzazadehF.TascanThe first-integral method applied to the Eckhaus equationApplied Mathematics Letters252012798802
- W.M.TahaM.S.M.NooraniExact solutions of equation generated by the Jaulent–Miodek Hierarchy by -expansion methodMathematical Problems in Engineering2013 7 pages, Article ID 392830
- W.M.TahaM.S.M.NooraniI.HashimNew application of the -expansion method for thin film equationsAbstract and Applied Analysis20136 pages Article ID 535138
- M.WangX.LiJ.ZhangThe -expansion method and travelling wave solutions of nonlinear evolution equations in mathematical physicsPhysics Letters A3722008417423
- A.M.WazwazThe tanh method for traveling wave solution of nonlinear equationsApplied Mathematics and Computation1542004713723
- A.M.WazwazThe tanh and sine–cosine method for a reliable treatment of the modified equal width equation and its variantsCommunications in Nonlinear Science and Numerical Simulation112006148160
- A.M.WazwazPartial Differential Equations and Solitary Wave Theory2009SpringerNew York