
Abstract
The generalized (G′/G)-expansion method is thriving in finding exact traveling wave solutions of nonlinear evolution equations (NLEEs) in mathematical physics. In this paper, we bring to bear the generalized (G′/G)-expansion method to look for the exact solutions via the simplified MCH equation and the (1 + 1)-dimensional combined KdV–mKdV equations involving parameters. When the parameters take special values, solitary wave solutions are originated from the traveling wave solutions. It is established that the generalized (G′/G)-expansion method offers a further influential mathematical tool for constructing the exact solutions of NLEEs in mathematical physics.
1 Introduction
The importance of nonlinear evolution equations (NLEEs) is now well established, since these equations arise in various areas of science and engineering, especially in fluid mechanics, biology, plasma physics, solid-state physics, optical fibers, biophysics and so on. As a key problem, finding their analytical solutions is of great importance and is actually executed through various efficient and powerful methods such as the Miura transformation (CitationBock and Kruskal, 1979), the Jacobi elliptic function expansion method (Chen and Wang, Citation2005; Honga and Lub, Citation2012), the Adomian decomposition method (Adomain, Citation1994; Wazwaz, Citation2002), the method of bifurcation of planar dynamical systems (Li and Liu, Citation2000; Liu and Qian, Citation2001), the ansatz method (CitationHu, 2001), the Cole–Hopf transformation (CitationSalas and Gomez, 2010), the (G′/G)-expansion method (CitationZayed and Gepreel, 2009a,Citationb; Zayed, Citation2009; Wang et al., Citation2008; Taha and Noorani, Citation2013a,Citationb; Akbar et al., Citation2012a,Citationb,Citationc; Song and Ge, Citation2010), the (G′/G, 1/G)-expansion method (Zayed et al., Citation2012; Zayed and Ibrahim, Citation2013; Zayed and Abdelaziz, Citation2012; Yang, Citation2013), the improved (G′/G)-expansion method (CitationZhang et al., 2010), the modified simple equation method (Jawad et al., Citation2010; Khan et al., Citation2013; Khan and Akbar, Citation2013), the novel (G′/G)-expansion method (Alam et al., Citation2014; Alam and Akbar, Citation2014), the new generalized (G′/G)-expansion method (CitationNaher and Abdullah, 2013) and so on.
The objective of this article is to search for new study relating to the generalized (G′/G)-expansion method for solving the simplified MCH equation and the (1 + 1)-dimensional combined KdV–mKdV equations to demonstrate the suitability and straightforwardness of the method.
The article is organized as follows: in Section 2, we describe this method for finding exact traveling wave solutions of nonlinear evolution equations. In Section 3, we will apply this method to obtain the traveling wave solutions of the simplified MCH equation and the (1 + 1)-dimensional combined KdV–mKdV equations. In Section 4, physical explanations are offered. In Section 5 comparison and in Section 6 conclusions are conferred.
2 Material and method
In this section we describe the generalized (G′/G) expansion method for finding traveling wave solutions of nonlinear evolution equations. Let us consider a general nonlinear PDE in the form(1) where u = u(x, t) is an unknown function, P is a polynomial in u(x, t) and its derivatives in which highest order derivatives and nonlinear terms are involved and the subscripts stand for the partial derivatives.
Step 1: We combine the real variables x and t by a complex variable Φ(2) where V is the speed of the traveling wave. The traveling wave transformation (2) converts Eq. Equation(1)
(1) into an ordinary differential equation (ODE) for u = u(Φ):
(3) where Q is a polynomial of u and its derivatives and the superscripts indicate the ordinary derivatives with respect to Φ.
Step 2: According to possibility Eq. Equation(3)(3) can be integrated term by term one or more times, yields constant(s) of integration. The integral constant may be zero, for simplicity.
Step 3: Suppose the traveling wave solution of Eq. Equation(3)(3) can be expressed as follows:
(4) where either aN or bN may be zero, but both aN or bN could be zero at a time, ai (i = 0, 1, 2,
, N) and bi (i = 1, 2,
, N) and d are arbitrary constants to be determined later and H(Φ) is
(5) where G = G(Φ) satisfies the following auxiliary ordinary differential equation:
(6) Eq. Equation(6)
(6) has individual five solutions (see CitationLanlan and Huaitang, 2013)where the prime stands for derivative with respect to Φ; A, B,C and E are real parameters.
Step 4: To determine the positive integer N, taking the homogeneous balance between the highest order nonlinear terms and the derivatives of the highest order appearing in Eq. Equation(3)(3) .
Step 5: Substitute Eq. Equation(4)(4) and Eq. Equation(6)
(6) including Eq. Equation(5)
(5) into Eq. Equation(3)
(3) with the value of N obtained in Step 4, we obtain polynomials in (d + H)N (N = 0,1,2,
) and (d + H)−N (N = 0,1,2,
). Then, we collect each coefficient of the resulted polynomials to zero, yields a set of algebraic equations for ai (i = 0,1,2,
, N) and bi (i = 1,2,
, N), d and V.
Step 6: Suppose that the value of the constants ai (i = 0,1,2, , N), bi (i = 1,2,
, N), d and V can be found by solving the algebraic equations obtained in Step 5. Since the general solution of Eq. Equation(6)
(6) is well known to us, inserting the values of ai (i = 0,1,2,
, N), bi (i = 1,2,
, N), d and V into Eq. Equation(4)
(4) , we obtain more general type and new exact traveling wave solutions of the nonlinear partial differential equation Equation(1)
(1) .
Using the general solution of Eq. Equation(6)(6) , we have the following solutions of Eq. Equation(5)
(5) :
Family 1: When B ≠ 0, ψ = A − C and Ω = B2 + 4E(A − C) > 0,(7)
Family 2: When B ≠ 0, ψ = A − C and Ω = B2 + 4E(A − C) < 0,(8)
Family 3: When B ≠ 0, ψ = A − C and Ω = B2 + 4E(A − C) = 0,(9)
Family 4: When B = 0, ψ = A − C and Δ = ψE > 0,(10)
Family 5: When B = 0, ψ = A − C and Δ = ψE < 0,(11)
3 Applications
In this section, we will apply the generalized (G′/G) expansion method to find the exact solutions and the solitary wave solutions of the following two nonlinear evolution equations.
3.1 The simplified MCH equation
Now we will bring to bear the generalized (G′/G) expansion method to find exact solutions and then the solitary wave solutions of the simplified MCH equation in the form,(12)
Details of CH and MCH equations can be found in references (CitationLiu et al., 2010: Wazwaz, Citation2005; Camassa and Holm, Citation1993; Tian and Song, Citation2004; Boyd, Citation1997).
Now, we use the traveling wave transformation Eq. Equation(2)(2) into Eq. Equation(12)
(12) , which yields
(13) where the superscripts stand for the derivatives with respect to Φ.
Integrating Eq. Equation(13)(13) once with respect to Φ yields:
(14) where P is an integral constant that could be determined later.
Taking the homogeneous balance between u3 and in Eq. Equation(14)
(14) , we obtain N = 1. Therefore, the solution of Eq. Equation(14)
(14) is of the form
(15) where a0, a1, b1 and d are constants to be determined.
Substituting Eq. Equation(15)(15) together with Eqs. Equation(5)
(5) and Equation(6)
(6) into Eq. Equation(14)
(14) , the left-hand side is converted into polynomials in (d + H)N (N = 0,1,2,
) and (d + H)−N (N = 0,1,2,
). We collect each coefficient of these resulted polynomials to zero, yields a set of simultaneous algebraic equations (for simplicity which are not presented here) for a0, a1, b1, d and V. Solving these algebraic equations with the help of symbolic computation software, we obtain following:
(16) where
A, B, C and E are free parameters.
Substituting Eq. Equation(16)(16) into Eq. Equation(15)
(15) , along with Eq. Equation(7)
(7) and simplifying yields following traveling wave solutions (if C1 = 0 but C2 ≠ 0 and C2 = 0 but C1 ≠ 0), respectively:
where
.
Substituting Eq. Equation(16)(16) into Eq. Equation(15)
(15) , along with Eq. Equation(8)
(8) and simplifying, the obtained exact solutions become (if C1 = 0 but C2 ≠ 0; C2 = 0 but C1 ≠ 0), respectively:
Substituting Eq. Equation(16)(16) into Eq. Equation(15)
(15) together with Eq. Equation(9)
(9) and simplifying, we obtain
Substituting Eq. Equation(16)(16) into Eq. Equation(15)
(15) , along with Eq. Equation(10)
(10) and simplifying, we obtain following traveling wave solutions (if C1 = 0 but C2 ≠ 0; C2 = 0 but C1 ≠ 0), respectively:
Substituting Eq. Equation(16)(16) into Eq. Equation(15)
(15) , together with Eq. Equation(11)
(11) and simplifying, our obtained exact solutions become (if C1 = 0 but C2 ≠ 0; C2 = 0 but C1 ≠ 0), respectively:
3.2 The (1 + 1)-dimensional combined KdV–mKdV equation
In this section, we will apply the generalized (G′/G) expansion method to find exact solutions and then the solitary wave solutions of the (1 + 1)-dimensional combined KdV–mKdV equation (CitationZayed, 2011) in the form,(17) where α and β are nonzero constants. This equation may describe the wave propagation of the bound particle, sound wave and thermal pulse. This equation is the most popular soliton equation and often exists in practical problems such as fluid physics and quantum field theory.
The wave transformation equation u(Φ) = u(x,t), Φ = x − Vt. Reduces Eq. Equation(17)(17) into the following ODE:
(18) where the superscripts stand for the derivatives with respect to Φ.Integrating Eq. Equation(18)
(18) once with respect to Φ yields:
(19) where P is an integral constant that could be determined later.
Taking the homogeneous balance between u3 and in Eq. Equation(19)
(19) , we obtain N = 1. Therefore, the solution of Eq. Equation(19)
(19) is of the form
(20) where a0, a1, b1 and d are constants to be determined.
Substituting Eq. Equation(20)(20) together with Eqs. Equation(5)
(5) and Equation(6)
(6) into Eq. Equation(19)
(19) , the left-hand side is converted into polynomials in (d + H)N (N = 0,1,2,
) and (d + H)−N (N = 0,1,2,
). We collect each coefficient of these resulted polynomials to zero, yields a set of simultaneous algebraic equations (for simplicity which are not presented here) for a0, a1, b1, d and V. Solving these algebraic equations with the help of symbolic computation software, we obtain following:
(21) where ψ = A − C,
, m2 = −(Aαm1 − 12dψ − 6B) A, B, C and E are free parameters.
Substituting Eq. Equation(21)(21) into Eq. Equation(20)
(20) , along with Eq. Equation(7)
(7) and simplifying yields following traveling wave solutions (if C1 = 0 but C2 ≠ 0 and C2 = 0 but C1 ≠ 0), respectively:
where
.
Substituting Eq. Equation(21)(21) into Eq. Equation(20)
(20) , along with Eq. Equation(8)
(8) and simplifying, the obtained exact solutions become (if C1 = 0 but C2 ≠ 0;C2 = 0 but C1 ≠ 0), respectively:
Substituting Eq. Equation(21)(21) into Eq. Equation(20)
(20) together with Eq. Equation(9)
(9) and simplifying, we obtain
Substituting Eq. Equation(21)(21) into Eq. Equation(20)
(20) , along with Eq. Equation(10)
(10) and simplifying, we obtain following traveling wave solutions (if C1 = 0 but C2 ≠ 0;C2 = 0 but C1 ≠ 0), respectively:
Substituting Eq. Equation(21)(21) into Eq. Equation(20)
(20) , together with Eq. Equation(11)
(11) and simplifying, our obtained exact solutions become (if C1 = 0 but C2 ≠ 0; C2 = 0 but C1 ≠ 0), respectively:
4 Physical explanation
In this section we will put forth the physical significances and graphical representations of the obtained results of the simplified MCH equation and the (1 + 1)-dimensional combined KdV–mKdV equation.
4.1 Results and discussion
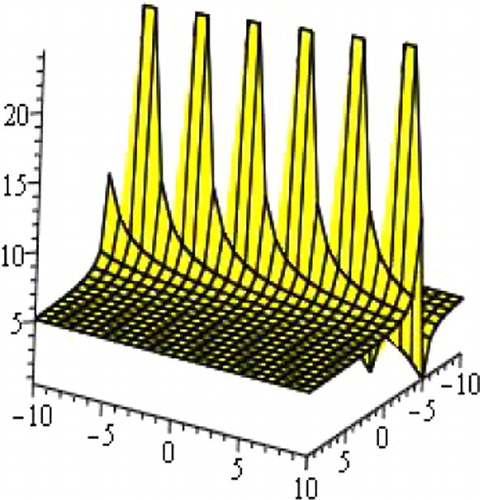
| i. | Solutions u1(Φ), u2(Φ), u6(Φ), u7(Φ), u10(Φ), u11(Φ), u15(Φ) and u16(Φ) are hyperbolic function solutions. Solutions u1(Φ), u6(Φ), u10(Φ) and u15(Φ) are the single soliton solution. shows the shape of the exact single soliton solution (only shows the shape of solution of u10(Φ) with A = 4, B = 1, C = 1, E = 1, α = 1, β = 1, d = 1 with −10 ⩽ x, t ⩽ 10). The shape of figure of solutions u1(Φ), u6(Φ) and u15(Φ) are similar to the figure of solution u10(Φ). Solutions u2(Φ) and u7(Φ) are the singular soliton solution. shows the shape of the exact singular soliton solution (only shows the shape of solution of u7(Φ) with A = 2, B = 0, C = 1, E = 1, k = 1, β = 1, d = 1 with −10 ⩽ x, t ⩽ 10). The shape of figure of solutions u2(Φ) are similar to the figure of solution u7(Φ). Solutions u11(Φ) and u16(Φ) are the Kink solutions. shows the shape of the exact Kink solution (only shows the shape of solution of u11(Φ) with A = 2, B = 0, C = 1, E = 1, α = 1, β = 1, d = 1 with −10 ⩽ x, t ⩽ 10). | ||||
| ii. | Solutions u3(Φ), u4(Φ), u8(Φ), u9(Φ), u12(Φ), u13(Φ), u17(Φ) and u18(Φ) are trigonometric function solutions. Solutions u3(Φ) and u12(Φ) are the single soliton solution. The shape of figure of solutions u3(Φ) and u12(Φ) are similar to the figure of solution u10(Φ). Solutions u4(Φ), u13(Φ), u17(Φ), u9(Φ) and u18(Φ) are the exact periodic traveling wave solutions. below shows the periodic solution of u9(Φ). Graph of periodic solution of u9(Φ), for A = 1, B = 0, C = 2, E = 2, k = 1, d = 1, β = 1 with −5 ⩽ x, t ⩽ 5. For convenience the figure is omitted. Solution u8(Φ) is the multiple soliton solution. shows the shape of the exact singular soliton solution (only shows the shape of solution of u8(Φ) with A = 1, B = 0, C = 2, E = 1, k = 1, β = 1, d = 1 with −1 ⩽ x, t ⩽ 1). | ||||
| iii. | Solutions u5(Φ) and u14(Φ) are complex rational traveling wave solutions. Solution u5(Φ) is the single soliton solution. The shape of figure of solution u5(Φ) is similar to the figure of solution u10(Φ). shows the shape of the exact singular Kink solution (only shows the shape of solution of u14(Φ) with A = 1, B = 2, C = 2, E = 1, α = 1, d = 1, C1 = 2, C2 = 1, β = 1 with −10 ⩽ x, t ⩽ 10). | ||||
Figure 1 Single soliton wave, the shape of solution of u10(Φ) with A = 4, B = 1, C = 1, E = 1, α = 1, β = 1, d = 1 with −10 ⩽ x, t ⩽ 10.
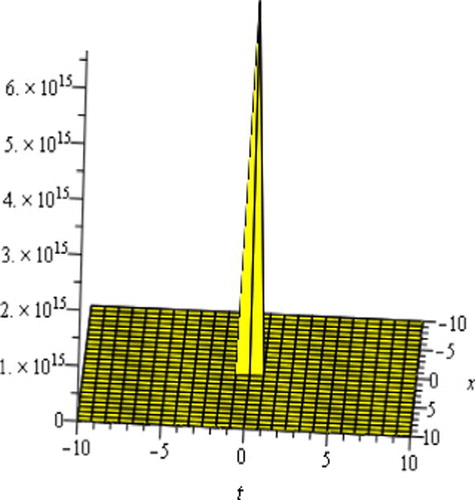
Figure 2 Singular soliton, the shape of solution of u7(Φ) with A = 2, B = 0, C = 1, E = 1, k = 1, β = 1, d = 1 with −10 ⩽ x, t ⩽ 10.
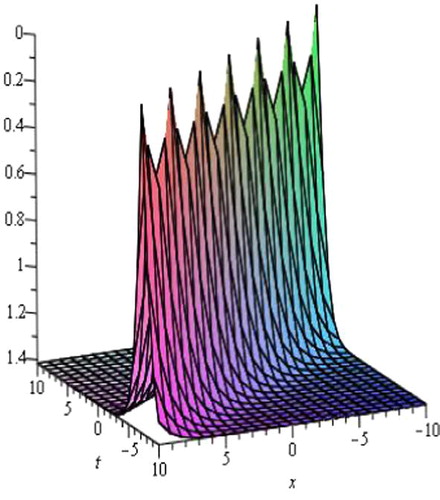
Figure 3 Kink solution, the shape of solution of u11(Φ) with A = 2, B = 0, C = 1, E = 1, α = 1, β = 1, d = 1 with −10 ⩽ x, t ⩽ 10.
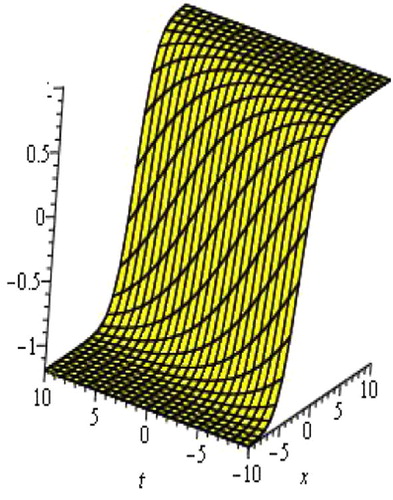
Figure 4 Periodic solutions of u9(Φ), for A = 1, B = 0, C = 2, E = 2, k = 1, d = 1, β = 1 with −5 ⩽ x, t ⩽ 5.
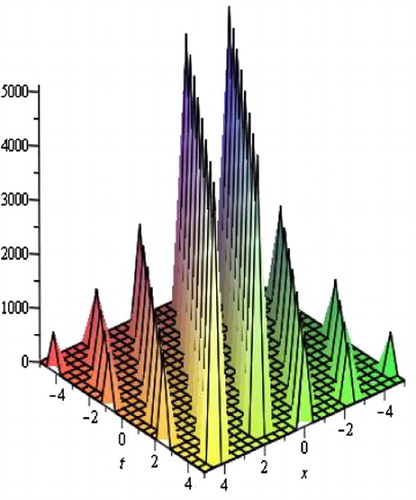
Figure 5 Multiple soliton solution, the shape of solution of u8(Φ) with A = 1, B = 0, C = 2, E = 1, k = 1, β = 1, d = 1 with −1 ⩽ x, t ⩽ 1.
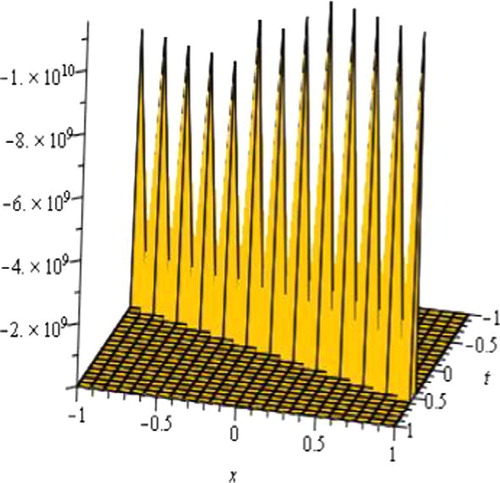
Figure 6 Singular Kink solution, the shape of solution of u14(Φ) with A = 1, B = 2, C = 2, E = 1, α = 1, d = 1, C1 = 2, C2 = 1, β = 1 with −10 ⩽ x, t ⩽ 10.
4.2 Graphical representation
The graphical demonstrations of obtained solutions for particular values of the arbitrary constants are shown in – with the aid of commercial software Maple.
5 Comparison
5.1 Comparison between CitationZayed (2011) solutions and our solutions
CitationZayed (2011) considered solutions of the (1 + 1)-dimensional combined KdV–mKdV equation using the basic (G′/G)-expansion method combined with the Riccati equation. The solutions of the (1 + 1)-dimensional combined KdV–mKdV equation obtained by the generalized (G′/G)-expansion method are different from those of the basic (G′/G)-expansion method combined with the Riccati equation. Moreover, in CitationZayed (2011) investigated the well-established (1 + 1)-dimensional combined KdV–mKdV equation to obtain exact solutions via the basic (G′/G)-expansion method and achieved only seven solutions (see Appendix). Furthermore, nine solutions of the well-known (1 + 1)-dimensional combined KdV–mKdV equation is constructed by applying the generalized (G′/G)-expansion method. On the other hand, the auxiliary equation used in this paper is different, so obtained solutions is also different. Similarly for any nonlinear evolution equation it can be shown that the generalized (G′/G)-expansion method is much easier than other methods.
5.2 Comparison between CitationLiu et al. (2010) solutions and our solutions
CitationLiu et al. (2010) investigated solutions of the well-established simplified MCH equation via the (G′/G)-expansion method wherein he used the linear ordinary differential equation as auxiliary equation and traveling wave solution was presented in the form
where am ≠ 0. It is noteworthy to point out that some of our solutions are coincided with already published results, if parameters taken particular values which authenticate our solutions. The comparison of CitationLiu et al. (2010) and the solutions obtained in this article are given in:
Table 1 Comparison between CitationLiu et al. (2010) solutions and our solutions.
In addition to this table, we obtain further new exact traveling wave solutions u2(Φ), u4(Φ), u7(Φ) and u9(Φ), which are not reported in the previous literature (CitationLiu et al., 2010). When the arbitrary constants assume particular values the obtained solutions reduce to some special functions. On the other hand, the auxiliary equation used in this paper is different, so obtained solutions is also different.
6 Conclusion
Some new exact traveling wave solutions of the simplified MCH equation and the (1 + 1)-dimensional combined KdV–mKdV equations are constructed in this article by applying the generalized (G′/G)-expansion method. The obtained solutions are presented in terms of hyperbolic, trigonometric and rational functions. Also, the solutions show that the application of the method is trustworthy, straightforward and gives many solutions. We have noted that the generalized (G′/G)-expansion method changes the given difficult problems into simple problems which can be solved easily. We hope this method can be more effectively used to solve many nonlinear partial differential equations in applied mathematics, engineering and mathematical physics.
Acknowledgments
The authors would like to express their sincere thanks to the anonymous referee(s) for their detail comments and valuable suggestions.
Notes
Peer review under responsibility of University of Bahrain.
References
- G.AdomainSolving Frontier Problems of Physics: The Decomposition Method1994Kluwer Academic PublishersBoston, MA
- M.A.AkbarN.H.M.AliE.M.E.ZayedAbundant exact traveling wave solutions of the generalized Bretherton equations via the (G′/G)-expansion methodCommun. Theor. Phys.572012173178
- M.A.AkbarN.H.M.AliE.M.E.ZayedA generalized and improved (G′/G)-expansion method for nonlinear evolution equationsMath. Prob. Eng.201220122210.1155/2012/459879
- M.A.AkbarN.H.M.AliS.T.Mohyud-DinThe alternative (G′/G)-expansion method with generalized Riccati equation: application to fifth order (1 + 1)-dimensional Caudrey–Dodd–Gibbon equationInt. J. Phys. Sci.752012743752
- M.N.AlamM.A.AkbarTraveling wave solutions of the nonlinear (1 + 1)-dimensional modified Benjamin–Bona–Mahony equation by using novel (G′/G)-expansionPhys. Rev. Res. Int.412014147165
- M.N.AlamM.A.AkbarS.T.Mohyud-DinA novel (G′/G)-expansion method and its application to the Boussinesq equationChin. Phys. B232201402020302021010.1088/1674-1056/23/2/020203 (Article ID 131006)
- T.L.BockM.D.KruskalA two-parameter Miura transformation of the Benjamin-one equationPhys. Lett. A741979173176
- J.P.BoydPeakons and cashoidal waves: traveling wave solutions of the Camassa–Holm equationAppl. Math. Comput.812–31997173187
- R.CamassaD.HolmAn integrable shallow water equation with peaked solitonsPhys. Rev. Lett.7111199316611664
- Y.ChenQ.WangExtended Jacobi elliptic function rational expansion method and abundant families of Jacobi elliptic functions solutions to (1 + 1)-dimensional dispersive long wave equationChaos, Solitons Fractals242005745757
- B.HongaD.LubNew Jacobi elliptic function-like solutions for the general KdV equation with variable coefficientsMath. Comput. Modell.55201215941660
- J.L.HuExplicit solutions to three nonlinear physical modelsPhys. Lett. A28720018189
- A.J.M.JawadM.D.PetkovicA.BiswasModified simple equation method for nonlinear evolution equationsAppl. Math. Comput.2172010869877
- K.KhanM.A.AkbarExact solutions of the (2 + 1)-dimensional cubic Klein–Gordon equation and the (3 + 1)-dimensional Zakharov–Kuznetsov equation using the modified simple equation methodJ. Assoc. Arab Univ. Basic Appl. Sci.201310.1016/j.jaubas.2013.05.001
- K.KhanM.A.AkbarM.N.AlamTraveling wave solutions of the nonlinear Drinfel’d-Sokolov–Wilson equation and modified Benjamin–Bona–Mahony equationsJ. Egypt. Math. Soc.21201323324010.1016/j.joems.2013.04.010
- X.LanlanC.HuaitangNew (G′/G)-expansion method and its applications to nonlinear PDEPhys. Rev. Res. Int.342013407415
- J.B.LiZ.R.LiuSmooth and non-smooth traveling waves in a nonlinearly dispersive equationAppl. Math. Model.2520004156
- Z.R.LiuT.F.QianPeakons and their bifurcation in a generalized Camassa–Holm equationInt. J. Bifurcation Chaos112001781792
- X.LiuL.TianY.WuApplication of the (G′/G)-expansion method to two nonlinear evolution equationsAppl. Math. Comput.217201013761384
- H.NaherF.A.AbdullahNew approach of (G′/G)-expansion method and new approach of generalized (G′/G)-expansion method for nonlinear evolution equationAIP Adv.3201303211610.1063/1.4794947
- A.H.SalasC.A.GomezApplication of the Cole–Hopf transformation for finding exact solutions to several forms of the seventh-order KdV equationMath. Prob. Eng.2010201014 (Article ID 194329)
- M.SongY.GeApplication of the (G′/G)-expansion method to (3 + 1)-dimensional nonlinear evolution equationsComput. Math. Appl.60201012201227
- W.M.TahaM.S.M.NooraniApplication of the (G′/G)-expansion method for the generalized Fisher equation and modified equal width equationJ. Assoc. Arab Univ. Basic Appl. Sci.201310.1016/j.jaubas.2013.05.006
- W.M.TahaM.S.M.NooraniExact solutions of equation generated by the Jaulent–Miodek hierarchy by the (G′/G)-expansion methodMath. Prob. Eng.1020137 (Article ID 392830)
- L.TianX.SongNew peaked solitary wave solutions of the generalized Camassa–Holm equationChaos Solitons Fractals192004621637
- M.L.WangX.Z.LiJ.ZhangThe (G′/G)-expansion method and traveling wave solutions of nonlinear evolution equations in mathematical physicsPhys. Lett. A3722008417423
- A.M.WazwazPartial Differential Equations: Method and Applications2002Taylor and Francis
- A.M.WazwazNew compact and noncompact solutions for variants of a modified Camassa–Holm equationAppl. Math. Comput.1633200511651179
- Y.J.YangNew application of the (G′/G, 1/G)-expansion method to KP equationAppl. Math. Sci.7202013959967
- E.M.E.ZayedThe (G′/G)-expansion method and its applications to some nonlinear evolution equations in mathematical physicsJ. Appl. Math. Comput.30200989103
- E.M.E.ZayedThe (G′/G)-expansion method combined with the Riccati equation for finding exact solutions of nonlinear PDEsJ. Appl. Math. Inf.291–22011351367
- E.M.E.ZayedM.A.M.AbdelazizThe two variable (G′/G,1/G)-expansion method for solving the nonlinear KdV–mKdV equationMath. Prob. Eng.201220121410.1155/2012/725061 (Article ID 725061)
- E.M.E.ZayedK.A.GepreelThe (G′/G)-expansion method for finding travelling wave solutions of nonlinear PDEs in mathematical physicsJ. Math. Phys.5012009013502013513
- E.M.E.ZayedK.A.GepreelSome applications of the (G′/G)-expansion method to nonlinear partial differential equationsAppl. Math. Comput.21212009113
- Zayed, E.M.E., Ibrahim, S.A.H., 2013. Two variables (G′/G, 1/G)-expansion method for finding exact traveling wave solutions of the (3 + 1)-dimensional nonlinear potential Yu–Toda–Sasa–Fukuyama equation. In: International Conference on Advanced Computer Science and Electronics Information (ICACSEI 2013). Atlantis Press (July 2013), pp. 388–392.
- E.M.E.ZayedS.A.H.IbrahimM.A.M.AbdelazizTraveling wave solutions of the nonlinear (3 + 1)-dimensional Kadomtsev–Petviashvili equation using the two variables (G′/G,1/G)-expansion methodJ. Appl. Math.20122012810.1155/2012/560531 (Article ID 560531)
- J.ZhangF.JiangX.ZhaoAn improved (G′/G)-expansion method for solving nonlinear evolution equationsInt. J. Comput. Math.878201017161725
Appendix A
CitationZayed (2011) studied solutions of the (1 + 1)-dimensional combined KdV–mKdV equation using the basic (G′/G)-expansion method combined with the Riccati equation and achieved the following calculations and exact solutions:(6)
Consequently the following algebraic equations(7)
Which can be solved to get(8)
Substituting (3.8) into (3.4) yields(9) Where
(10)
According to general solutions of the Riccati equations, (CitationZayed, 2011) got the following families of exact solutions:
Family 1. If , then
(11) Or
(12) Where
and
Family 2. If then
(13) Or
(14) Where
.
Family 3. If A = 1, B = −1, then(15) Where
.
Family 4. If A = B = 1, then(16) Where
.
Family 5. If A = 0, B ≠ 0, then(17) where
.
The general solutions of the Riccati equations are well known which are listed in the following table:
Table