
Abstract
This paper witnesses the application of a tri-prong scheme comprising the well-known Variational Iteration (VIM), Adomian’s polynomials and an auxiliary parameter to obtain solutions of regularized long wave (RLW) equation in large domain. Computational work elucidates the solution procedure appropriately and comparison with results by the standard variational iteration method shows that the auxiliary parameter proves very effective to control the convergence region of approximate solutions.
1 Introduction
Recently, lot of attention is being given to nonlinear sciences due to the fact that most of the physical phenomenons are nonlinear in nature. The regularized long wave (RLW) equation is one of the important partial differential equations of the nonlinear dispersive waves. Solitary waves are wave packet or pulses, which propagate in nonlinear dispersive media. Due to dynamical balance between the nonlinear and dispersive effects, these waves retain a stable wave form. The one-dimensional RLW equation is as follows:(1) with the physical initial condition
where γ > 0 is constant. This equation was first proposed by Peregrine in 1966 (Peregrine, Citation1966) as an alternative model to the KdV equation. The word “regularized” refers to the fact that the RLW equation has been studied extensively by Benjamin, Bona and Mahoney (Benjamin et al., Citation1972) and indeed, the equation is also referred to as the BBM equation. The RLW equation plays a major role in the study of non-linear dispersive waves (Abdulloev et al., Citation1976; Bona et al., Citation1985") because of its description of a larger number of important physical phenomena, such as shallow water waves and ion acoustic plasma waves. Experimental evidence suggests that this description breaks down if the amplitude of any wave exceeds about 0.28, as wave breaking is observed with water waves (Dogan, Citation2002).
Figure 1d 4th- order approximation solution by present technique when h = 0.4476 in Example 4.1.
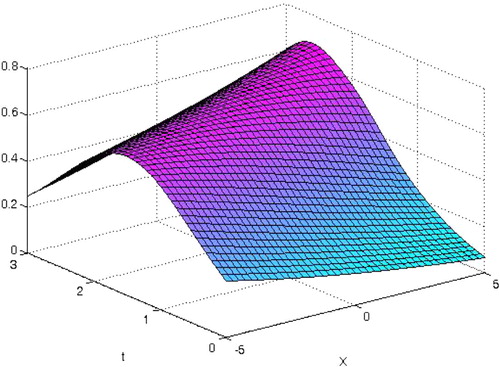
Figure 1e 4th-order approximation solution by standard VIM in Example 4.1.
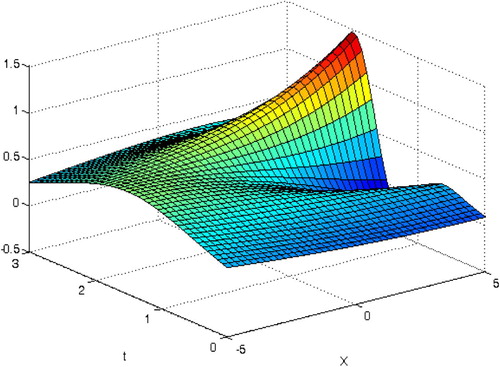
Figure 4 Error analysis of solution of Eq. Equation(13)(13) by finite difference method.
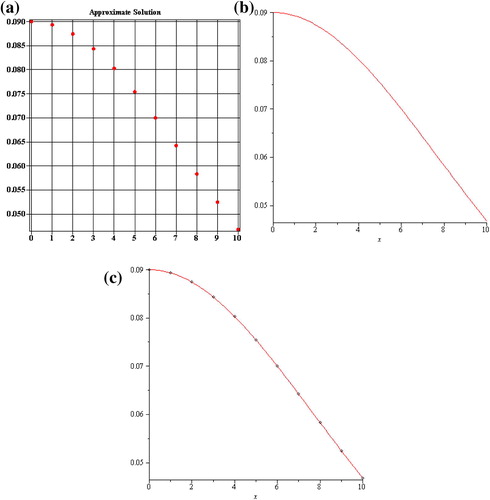
Figure 5a Absolute error for the 3rd-order approximation by standard VIM for u3(x,t) in Example 4.3.
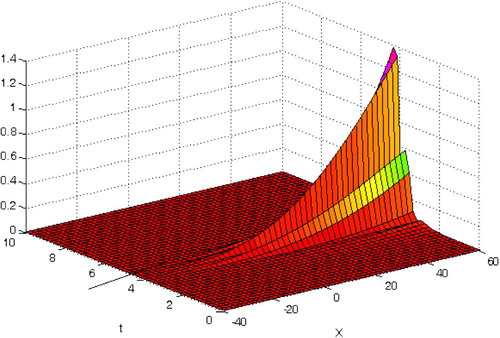
Figure 5b Absolute error for the 3rd-order approximation by present technique when h = 0.2712 in Example 4.3.
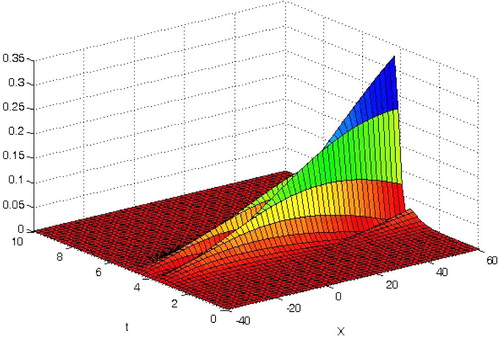
Figure 6 Error analysis of solution of Example 4.3 by finite difference method.
The RLW equation has solitary wave solutions similar to those of the KdV equation, and the interaction of solitary waves studied by Benjamin et al. (Citation1972); Bona et al. (Citation1980) suggested that the RLW wave interactions are inelastic, it was shown by Olver (Citation1979) that the equation has three independent solution invariants. The possession of only a finite number of conservation conditions indicates that the equation is non-integrable and it is not amenable to attack by the IST method (Sloan, Citation1991). Since the analytical solution of the RLW equation is not very useful, the availability of accurate and efficient numerical methods is essential.
The numerical solution of the RLW equation has been considered by many authors. Peregrine used a finite-difference scheme to solve this equation, which is second-order in space and first-order in time (Peregrine, Citation1966). Bona and Pritchard applied the Runge–Kutta and predictor/corrector methods to obtain RLW equation (Bona et al., Citation1985). Various numerical studies have been reported based on the finite difference (Qianshun et al., Citation1995), pseudo-spectral (Gou and Cao, Citation1988), splitting (Jain et al., Citation1993) and Galerkin methods (Sanz-Serna and Christie, Citation1981). Gardner et al. used a least-squares technique with space linear finite elements to construct a numerical solution for this equation (Gardner et al., Citation1996). In addition, finite element method based on both quadratic and cubic B-spline finite elements within Galerkin’s method has been used for obtaining the solutions of the RLW equation by Gardner et al., Citation1995. Soliman and Raslan solved the RLW equation by using the collocation method with quadratic B-spline at the midpoint (Soliman and Raslan, Citation2001). Soliman and Hussein used the collocation method with septic spline to solve the RLW equation (Soliman and Hussien, Citation2005). Dong solved the RLW equation with the petrov-Galerkin method using quadratic B-spline finite elements (Dogan, Citation2001). Shokri and Dehghan used a mesh less method by the radial basis functions for numerical solution of the RLW equation (Shokri and Dehghan, Citation2010). Recently, semi-analytic methods have been used to solve the RLW equation. Some of these methods are the Adomian decomposition method (El-Danaf et al., Citation2005), homotopy analysis method (Rashidi et al., Citation2009), homotopy perturbation method (Inc and Uğurlu, Citation2007) and variational iteration method (Yusufoglu and Bekir, Citation2007).
In He, Citation1999, Ji-Huan He gave a very lucid as well as elementary discussion of the variational iteration method; the method was further developed by the originator himself (He, Citation2006, Citation2007; He et al., Citation2010"). The main property of the method is its flexibility and ability to obtain solutions of nonlinear equations accurately and conveniently (CitationNoor and Mohyud-Din, 2008 ; Herişanu and Marinca, Citation2010; Yilmaz and Inc, Citation2010"). Also, there are many modifications of the variational iteration method, among which Herisanu and Marinca’s modification is much more attractive, where the variational iteration method is coupled with the least squares technology, and one iteration leads to ideal results (He, Citation2007). Yilmaz and Inc constructed a variational iteration algorithm, where an auxiliary parameter was introduced to adjust the convergence rate, but they did not give a general rule for the best choice of the auxiliary parameter (Yilmaz and Inc, Citation2010). This modified method was further developed by Hosseini et al. (Citation2010a,Citationb, Citation2012)"; Ghaneai et al. (Citation2012) by introducing some profitable rules for optimal determination of the auxiliary parameter. It is to be highlighted that Abbasbandy (Citation2007a,Citationb)" introduced Adomian’s polynomials in the traditional VIM for solving quadratic Riccati differential and Klein-Gordon equations and subsequently CitationNoor and Mohyud-Din (2008) for solving singular and nonsingular initial and boundary value problems. Ref., (Biswas and Zerrad, Citation2007; Biswas, Citation2010; Biswas and Kara, Citation2011; Girgis et al., Citation2010; Girgis and Biswas, Citation2011; Antonova and Biswas, Citation2009; Girgis and Biswas, Citation2010; Labidi et al., Citation2012; Kirshnan et al., Citation2011; Kirshnan et al., Citation2012") also discuss regularized long wave equation in detail. Recently, Hosseini et al. (Citation2011) made an elegant coupling of Auxiliary parameter, Adomian’s polynomials and correction functional to solve nonlinear problems. Inspired and motivated by the ongoing research in this area, we apply the tri-prong algorithm (Hosseini et al., Citation2011) which is obtained by inserting Adomian’s polynomials in the correction functional having auxiliary parameter to find approximate solutions of RLW equation.
2 Variational Iteration Method (VIM)
Hereby, we briefly recapitulate the standard solution procedure of the variational iteration method. Consider the following functional equation:(2) where L is the highest order derivative that is assumed to be easily invertible, R is a linear differential operator of order less than L, Nu represents the nonlinear terms, and g is the source term. The basic characteristic of He’s method is to construct a correction functional for Eq. Equation(2)
(2) , which reads:
(3) where λ is a Lagrange multiplier which can be identified optimally via variational theory, un is the nth approximate solution, and
denotes a restricted variation, i.e.,
. After identification of the multiplier, a variational iteration algorithm is constructed, an exact solution can be achieved when n tends to infinity:
(4) In summary, we have the following variational iteration formula for Equation(2)
(2) :
(5)
3 Auxiliary parameter in variational iteration algorithm
An unknown auxiliary parameter h can be inserted into the variational iteration algorithm, Eq. Equation(5)(5) :
(6) It should be emphasized that un(x,h),n ⩾ 1 can be computed by symbolic computation software such as Maple or Mathematica. The approximate solutions un(x,h),n ⩾ 1 contain the auxiliary parameter h. The validity of the method is based on such an assumption that the approximation un(x,h),n ⩾ 0 converges to the exact solution. It is the auxiliary parameter h that ensures that the assumption can be satisfied. In general, by means of the error of norm two of the residual function, it is straightforward to choose a proper value of h which ensures that the approximate solutions are convergent (Hosseini et al., Citation2010a,Citationb, Citation2012; Ghaneai et al., Citation2012"). In fact, the proposed technology is very simple, easier to implement and is able to approximate the solution more accurately in a large solution domain.
4 Numerical examples
To elucidate the solution procedure, three examples are given.
Example 4.1
Consider the following RLW equation (Rashidi et al., Citation2009):(7) which admits the solution u(x,t) = 3α sech2(β [x − (1 + α)t]), where α > 0 is constant and
. Take (x,t) ∈ [ − 5,5] × [0,3]. According to the traditional Variational Iteration Method, we get
(8) Now, using algorithm defined in Hosseini et al. (Citation2010a,Citationb, Citation2011, Citation2012), Ghaneai et al. (Citation2012)", we have the following correction functional using Adomian’s polynomials:
(9) where An are the so-called Adomian’s polynomials. Now, beginning with u0(x,t) = u(x,0) = 3α sech2(βx) and α = 0.2, we stop the solution procedure at u4(x,t). , is the absolute error of u4(x,t) for (x,t) ∈ [ − 5,5] × [0,3], showing that the solution u4(x,t) is not valid for large values of x and t, of course, the accuracy can be improved if the iteration procedure continues and the exact solution can be obtained when n tends to infinity. Now, using the recursive scheme Equation(6)
(6) , we have:
and in general,
(10)
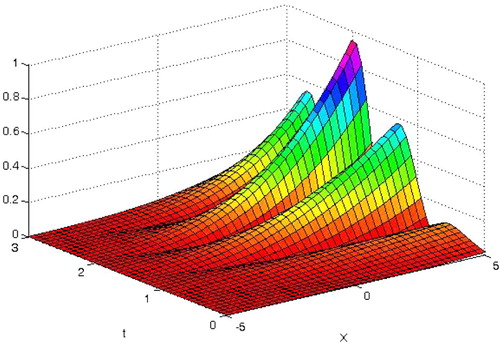
Figure 1a Absolute error for the 4th-order approximation by standard VIM in Example 4.1.
In order to find a proper value of h for the approximate solutions Equation(9)(9) , we define the following residual function,
(11) and the following error of norm two of the residual function,
(12) Here, we apply numerical integration to calculate the approximate e4 (h). For obtaining an optimal value of h, we choose the minimum point of the error of norm two of residual function Equation(12)
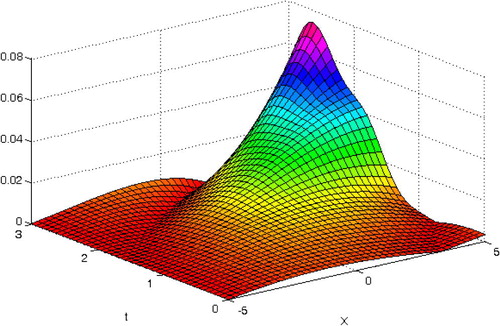
(12) . The minimum point of e4(h), as h = 0.4476, is obtained by using Maple software. By substituting h = 0.4476 in u4(x,t,h), the absolute error of the 4th-order approximation of the proposed method reduces remarkably, as shown in .
Figure 1b Absolute error for the 4th-order approximation by present technique when h = 0.4476 in Example 4.1.
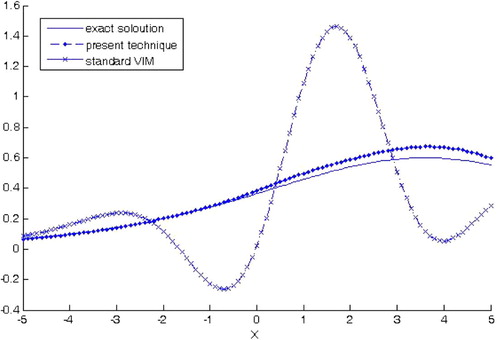
shows the exact solution, and and show the 4th- approximation solution by standard VIM and the present technique, respectively. In addition, the plot of numerical results for u4(x,t) by standard VIM and present technique in comparison with the exact solution at t = 3 s, is shown in . The results show the high efficiency of the proposed method in this example.
Figure 1c Exact solution for Example 4.1.
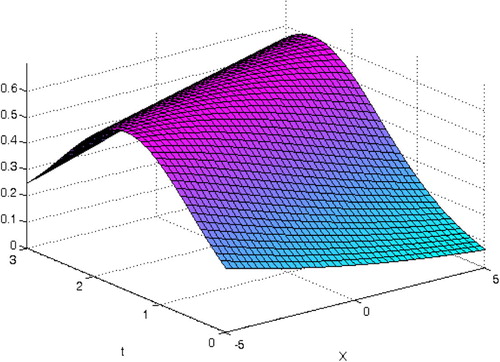
Figure 1f The plot of numerical results for u4(x,t) by standard VIM and present technique in comparison with the exact solution at t = 3 s, in Example 4.1.
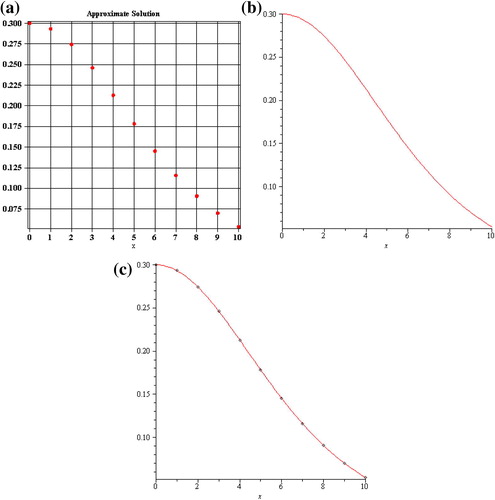
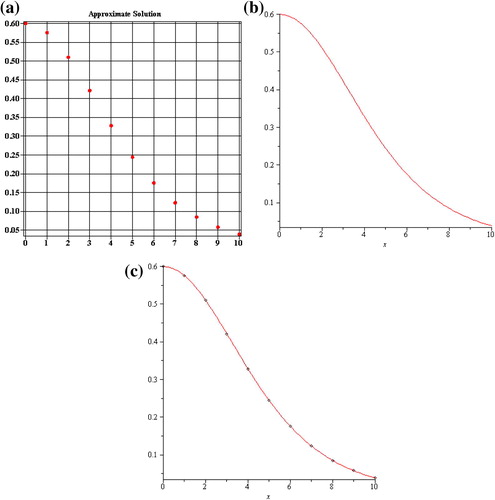
Using forward difference (Liszka and Orkisz, Citation1980) for time derivative and center difference for x direction we get the required formThe initial and boundary conditions are given as
Let us denote
This numerical scheme has traction error of O(k) + O(h2) which is similar to Kutluay and Esen, Citation2006. Since the stability parameter k/h2 depends not only on the form of the proposed finite difference scheme but also generally upon the solution u(x,t) being obtained, the complications and difficulties may arise in the analysis of stability. Let us take m = 5 and n = 5 where m and n are number of meshes in x and t directions where x = ih and t = jk. According to this
and
. Taking i = 1, 2, 3, 4 and j = 0, 1, 2, 3, 4, 5. Using initial and boundary data we can have tri diagonal matrix of the form for j = 0 and i = 1, 2, 3, 4.
After solving we have the following error table.
Example 4.2
Consider the following RLW equation (Yusufoglu and Bekir, Citation2007):(13) It is easy to verify that u(x,t) = 3c sech2(p(x − vt − x0)), where
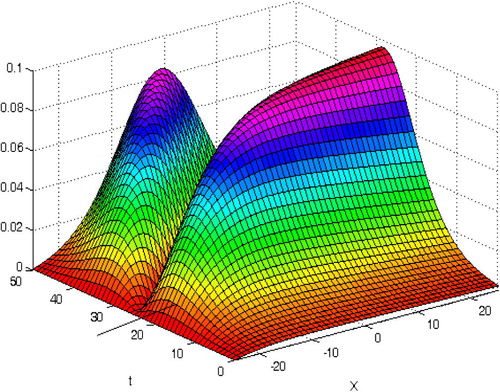
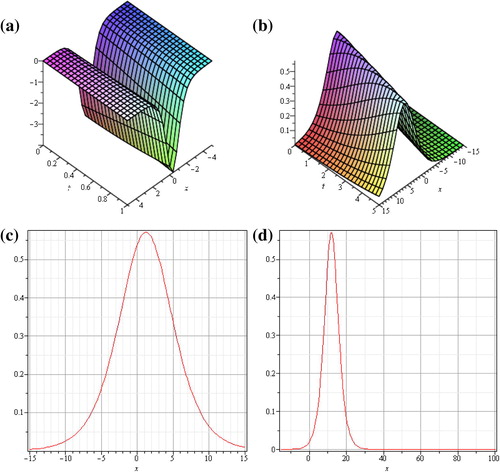
and c is constant. We take the solution domain as (x,t) ∈ [ − 25,25] × [0,50]. Similarly, the absolute error of u3(x,t) for (x,t) ∈ [ − 25,25] × [0,50], c = 0.03, γ = 1, and x0 = 0 tends to be very large when time tends to 50, as illustrated in (a).
Figure 2 Error analysis of solution of Eq. Equation(7)(7) by finite difference method.
According to the traditional Variational Iteration Method, we get(14) Now, using algorithm defined in Hosseini et al. (Citation2010a,Citationb, Citation2011, Citation2012), Ghaneai et al. (Citation2012)", we have the following correction functional using Adomian’s polynomials:
(15) where An are the so-called Adomian’s polynomials. Now, using the iteration formulation Equation(6)
(6) , we successively have
and in general,
We define the following residual function,
and the following error of norm two of the residual function,
clearly, suitable value of h is the global minimum point of e3 (h) which we obtain as h = 0.025 using Maple software. The absolute error of 3rd-order approximation of the proposed method in the solution domain (x,t) ∈ [ − 25,25] × [0,50], is given in Fig. 2(b), the accuracy is remarkably improved by the optimal choice of h.
After solving by FDM, we have the following error table.
Example 4.3
Consider the RLW Eq. Equation(13)(13) , in a third numerical experiment, we take c = 0.1, γ = 1, x0 = 0 through the interval [ − 40,60] × [0,10]. According to the standard VIM, we have the following variational iteration formula:
Beginning with
, we calculate the approximate solution till u3(x,t). The absolute error is shown in , it is obvious that the same problem keeps unchanged. Similarly, by the iteration algorithm Equation(6)
(6) , we have
and in general
We define the residual function of u3(x,t) as,
(16)
Figure 3a Absolute error for the 3rd-order approximation by standard VIM for u3(x,t) in Example 4.2.
For obtaining an optimal value of h, we choose the global minimum point of the error of norm two of residual function Equation(16)(16) :
thus we select h = 0.2712. The absolute error of 3rd-order approximation of the proposed method in the solution domain (x,t) ∈ [ − 25,25] × [0,50], is given in , the accuracy is remarkably improved by the optimal choice of h (see and ).
Figure 3b Absolute error for the 3rd-order approximation by present technique when h = 0.025 in Example 4.2.
After solving by FDM, we have the following error table.
By using the transformation ξ = kx + ωt, and sech method of the Eq. Equation(1)(1) , we get
Consider the trial solution u(ξ) = a0 + a1 sech(ξ) + a2 sech2(ξ), then follow the methodology given in Davodi et al., Citation2009, we have the following solution set
Their corresponding solution is
(16) For
and γ = 1, Eq. Equation(16)
(16) becomes the solution to Eq. Equation(7)
(7) , for k = 0.0853320186 and γ = 1, Eq. Equation(16)
(16) becomes the solution to Eq. Equation(13)
(13) , and for k = 0.1507556723, and γ = 1, Eq. Equation(16)
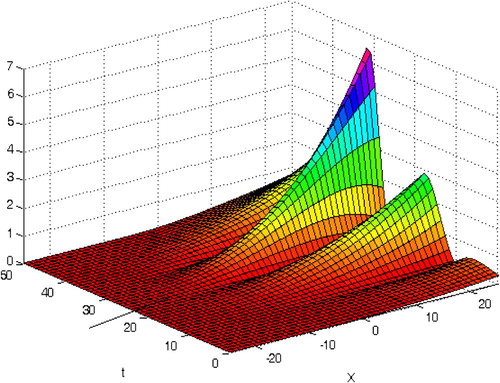
(16) becomes the solution to Example 3.3. Their graphical representation is give in .
Figure 7 Travelling wave solution of Eq. Equation(1)(1) for different values of parameters.
5 Conclusion
The present technique provides a simple way to adjust and control the convergence region of approximate solution of regularized long wave (RLW) equation for any values of t and x. An optimal auxiliary parameter can be determined by the error of norm two of the residual function. The obtained results are compared with numerical method “Finite Difference Method”. Tables 1-3 represent the error table for different values of k and ,, represent the error analysis. Sech method was also applied hence different values of k in their solution are identical to the proposed algorithms and represents the physical interpretation in 2D and 3D of Eq. Equation(1)(1) , this graph shows solitary wave solution, i. e., as t increases the graph travels at a constant speed and maintains its shape. Numerical results and graphical representations explicitly reveal the complete reliability of proposed method. It needs to be highlighted that the proposed variational iteration algorithm involving an auxiliary parameter is particularly suitable for inverse problems and differential-difference equations with large domain.
Notes
Peer review under responsibility of University of Bahrain.
References
- S.AbbasbandyNumerical solutions of nonlinear Klein–Gordon equation by variational iteration methodInt. J. Numer. Methods Eng.702007876881
- S.AbbasbandyA new application of He’s variational iteration method for quadratic Riccati differential equation by using Adomian’s polynomialsJ. Comput. Appl. Math.20720075963
- K.O.AbdulloevI.L.BogolubskyV.G.MakhankovOne more example of inelastic soliton interactionPhys. Lett. A561976427428
- M.AntonovaA.BiswasAdiabatic parameter dynamics of perturbed solitary wavesCommun. Nonlinear Sci. Numer. Simul.1432009734748
- T.B.BenjaminJ.L.BonaJ.J.MahoneyModel equations for long waves in nonlinear dispersive systemsPhilos. Trans. Roy. Soc. Lond. Ser. A, Math. Phys. Sci.27219724778
- A.BiswasSolitary wave for power-law regularized long wave equation and R(m;n) equationNonlinear Dyn.5932010423426
- A.BiswasA.H.KaraConservation laws for regularized long wave equations and R(m;n) equationsAdv. Sci. Lett.412011168170
- A.BiswasE.ZerradSoliton perturbation theory for the splitted regularized long wave equationAdv. Study Theor. Phys.162007295300
- J.L.BonaW.G.PritchardL.R.ScottSolitary-wave interactionPhys. Fluids231980438441
- J.L.BonaW.G.PritchardL.R.ScottNumerical schemes for a model of nonlinear dispersive wavesJ. Comput. Phys.6021985167196
- A.G.DavodiD.D.GanjiM.M.AlipourNumerous exact solutions for the Dodd Bullough Mikhailov equation by some different methodsAppl. Math.10220098194
- A.DoganNumerical solution of regularized long wave equation using Petrov–Galerkin methodCommun. Numer. Methods Eng.172001485494
- A.DoganNumerical solution of RLW equation using linear finite elements within Galerkin’s methodAppl. Math. Model.262002771783
- T.S.El-DanafM.A.RamadanA.AlaalThe use Adomian decomposition method for solving the regularized long-wave equationChaos Solitons Fractals262005747757
- L.R.T.GardnerG.A.Gardnerİ.DağA B-spline finite element method for the regularized long wave equationCommun. Numer. Methods Eng.1119955968
- L.R.T.GardnerG.A.GardnerA.DoganA least-squares FE scheme for the RLW equationCommun. Numer. Methods Eng.121996795804
- H.GhaneaiM.M.HosseiniS.T.Mohyud-DinModified variational iteration method for solving a neutral functional-differential equation with proportional delaysInt. J. Numer. Methods Heat Fluid Flow228201210861095
- L.GirgisA.BiswasSoliton perturbation theory for nonlinear wave equationsAppl. Math. Comput.2167201022262231
- L.GirgisA.BiswasA study of solitary wave by He’s semi inverse variational principleWaves Random Complex Media211201196104
- L.GirgisE.ZerredA.BiswasSolitary wave solutions of the peregrine equationInt. J. Oceans Oceanogr.4120104554
- B.Y.GouW.M.CaoThe Fourier pseudospectral method with a restrain operator for the RLW equationJ. Comput. Phys.741988110126
- J.H.HeVariational iteration method – a kind of non-linear analytical technique: some examplesInt. J. Non-Linear Mech.3441999699708
- J.H.HeSome asymptotic methods for strongly nonlinear equationsJ. Modern Phys. B2010200611411199
- J.H.HeVariational iteration method – some recent results and new interpretationsJ. Comput. Appl. Math.20712007317
- J.H.HeG.C.WuF.AustinThe variational iteration method which should be followedNonlinear Sci. Lett. A-Math., Phys. Mech.12010130
- N.HerişanuV.MarincaA modified variational iteration method for strongly nonlinear problemsNonlinear Sci. Lett. A122010183192
- M.M.HosseiniS.T.Mohyud-DinH.GhaneaiVariational iteration method for nonlinear age-structured population models using auxiliary parameterZeitschrift für Naturforschung-A6512201011371142
- M.M.HosseiniS.T.Mohyud-DinH.GhaneaiM.UsmanAuxiliary parameter in the variational iteration method and its optimal determinationInt. J. Nonlinear Sci. Numer. Simul.1172010495502
- M.M.HosseiniS.T.Mohyud-DinH.GhaneaiOn the coupling of Auxiliary parameter, Adomian’s polynomials and correction functionalMath. Comput. Appl.1642011959968
- M.M.HosseiniS.T.Mohyud-DinH.GhaneaiVariational iteration method for Hirota-Satsuma coupled KdV equation using auxiliary parameterInt. J. Numer. Methods Heat Fluid Flow2232012277286
- M.IncY.UğurluNumerical simulation of the regularized long wave equation by He’s homotopy perturbation methodPhys. Lett. A3692007173179
- P.C.JainR.ShankarT.V.SinghNumerical solution of regularized long-wave equationCommun. Numer. Methods Eng.91993587594
- E.V.KirshnanS.KumerA.BiswasSoliton and other nonlinear waves of the Boussinesq equationNonlinear Dyn.702201212131221
- E.V.KirshnanH.TrikiM.LabidiA.BiswasA study of shallow water waves with Gardner’s equationNonlinear Dyn.6642011497507
- Kutluay, S., Esen, A. 2006. A Finite Difference Solution of the Regularized Long-wave Equation. Mathematical Problems in Engineering.
- M.LabidiH.TrikiE.V.KirshnanA.BiswasSoliton solutions of the Long-shortwave equation with power law nonlinearityJ. Appl. Nonlinear Dyn.122012125140
- T.LiszkaJ.OrkiszThe finite difference method at arbitrary irregular grids and its application in applied mechanicsComput. Struct.1119808395
- M.A.NoorS.T.Mohyud-DinSolution of singular and nonsingular initial and boundary value problems by modified variational iteration methodMath. Problems Eng.2008200810.1155/2008/917407 Article ID 917407, 23 pages
- M.A.NoorS.T.Mohyud-DinVariational iteration method for solving higher-order nonlinear boundary value problems using He’s polynomialsInt. J. Nonlinear Sci. Numer. Simul.92008141156
- P.J.OlverEuler operators and conservation laws of the BBM equationMath. Proc. Cambridge Philos. Soc.851979143160
- D.H.PeregrineCalculations of the development of an undular boreJ. Fluid Mech.251966321330
- C.QianshunG.WangB.GuoConservative scheme for a model of nonlinear dispersive waves and its solitary waves induced by boundary motionJ. Comput. Phys.931995360375
- M.M.RashidiG.DomairryS.DinarvandApproximate solutions for the Burger and regularized long wave equations by means of the homotopy analysis methodCommun. Nonlinear Sci. Numer. Simul.142009708717
- J.M.Sanz-SernaI.ChristiePetrov–Galerkin methods for nonlinear dispersive waveJ. Comput. Phys.39198194102
- A.ShokriM.DehghanA Meshless method using the radial basis functions for numerical solution of the regularized long wave equationNumer. Methods Partial Differential Equations262010807825
- D.M.SloanFourier pseudospectral solution of the regularised long wave equationJ. Comput. Appl. Math.361991159179
- A.A.SolimanM.H.HussienCollocation solution for RLW equation with septic splineAppl. Math. Comput.1612005623636
- A.A.SolimanK.R.RaslanCollocation method using quadratic B-spline for the RLW equationInt. J. Comput. Math.782001399412
- E.YilmazM.IncNumerical simulation of the squeezing flow between two infinite plates by means of the modified variational iteration method with an auxiliary parameterNonlinear Sci. Lett. A132010297306
- E.YusufogluA.BekirApplication of the variational iteration method to the regularized long wave equationComput. Math. Appl.54200711541161