
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
This paper deals with the solutions of linear fuzzy Fredholm integral equation systems by using a combination of Bernstein and block-pulse functions on the interval [0, 1), that is called hybrid functions. Moreover, the existence of the solution and convergence of the proposed method is proved. Finally, illustrative examples are included in order to demonstrate the accuracy and the convergence of this method.
1 Introduction
The integral equations have been one of the principal tools in various areas of applied mathematics, physics and engineering. Many different basic functions have been used to estimate the solution of integral equations, such as orthonormal bases and wavelets [Citation1]. In recent years, the different kinds of hybrid functions are developing such as the hybrid functions consisting of the combination of block-pulse functions with Chebyshev polynomials [Citation2–Citation4] or Legendre polynomials [Citation5–Citation7].
Table 1 The maximum error of and
of Example 2 for N = 2 and M = 3.
Table 2 The maximum error of and
of Example 2 for N = 2 and M = 6.
The concept of fuzzy integral that was initiated by Dubois and Prade [Citation8] and investigated by Goetschel and Voxman [Citation9], Kaleva [Citation10], Nanda [Citation11] and others, attracted growing interest, in particular in relation to fuzzy control. There are several research papers about obtaining the numerical integration of fuzzy-valued functions and solving fuzzy Volterra and Fredholm integral equations, for example, the authors used Bernstein polynomials [Citation12], Lagrange interpolation [Citation13], divided and finite differences [Citation14], Legendre wavelets [Citation15], predictor–corrector procedures [Citation16] and Taylor expansion [Citation17] for solving fuzzy integral equations.
In this paper, we use a simple base, a combination of block-pulse functions on [0, 1) and Bernstein polynomials to solve linear Fredholm fuzzy integral equation systems. This paper is organized as follows. In Section 2, hybrid functions of block-pulse and Bernstein functions and its properties are introduced. In Section 3, we review some elementary concepts of the fuzzy calculus. In Section 4, fuzzy system of Fredholm integral equation is introduced. In Section 5, we prove the existence of the solution for systems of linear fuzzy Fredholm integral equations. In Section 6, we use the presented functions for approximating the solution of these systems. Convergence analysis of the presented method is discussed in Section 7. Section 8 includes two numerical examples for the proposed method. Finally, Section 9 gives our concluding remarks.
2 Properties of hybrid functions
2.1 Hybrid functions of block-pulse and Bernestein
Definition 1
[Citation18]
The Bernstein polynomials of the Mth degree are defined on the interval [0, 1] aswhere
.
There are (M + 1) Mth degree Bernstein basis polynomials. For mathematical convenience, we usually set Bm,M = 0 if m < 0 or m > M.
Definition 2
Hybrid functions bnm(t), n = 1, 2, …, N and m = 0, 1, …, M are defined on the interval [0, 1) as
where n and m are the orders of the block-pulse function and Bernestein polynomials, respectively.
2.2 Function approximation
A function f(x) ∈ L2[0, 1) may be approximated as(1)
(1) where
and
(2)
(2) where 〈 · , · 〉 is the standard inner product on L2[0, 1) and D is an N(M + 1) × N(M + 1) matrix that is said the dual matrix of B(x) that is
(3)
(3) We can specify the element of D′ as
where i, j = 0, 1, …, M. We can also approximate the function k(x, s) ∈ L2([0, 1) × [0, 1)) by double Fourier expansion as follows
(4)
(4) where K is an N(M + 1) × N(M + 1) matrix that according to Equation(2)
(2)
(2) we have
3 Basic concepts in fuzzy calculus
Definition 3
[Citation19]
A fuzzy number is a fuzzy set like u : R → [0, 1] which satisfies
| (i) | u is an upper semi-continuous function. | ||||
| (ii) | u(x) = 0 outside some interval [a, d]. | ||||
| (iii) | There are real numbers b, c such as a ≤ b ≤ c ≤ d and | ||||
| • | u(x) is a monotonic increasing function on [a, b]. | ||||
| • | u(x) is a monotonic decreasing function on [c, d]. | ||||
| • | u(x) = 1 for all x ∈ [b, c]. | ||||
Definition 4
An arbitrary fuzzy number in the parametric form is represented by an ordered pair of functions
which perform the following requirements
| • |
| ||||
| • |
| ||||
| • |
| ||||
| • | Addition: | ||||
| • | Subtraction: | ||||
| • | Scalar product: | ||||
| • | Multiplication: | ||||
Definition 5
For arbitrary fuzzy numbers and
the quantity
is the distance between
and
. This metric is equivalent to the one used by Puri and Ralescu [Citation21] and Kaleva [Citation10]. It is shown that (E1, D) is a complete metric space [Citation22]. Now we follow up of Goetschel and Voxman [Citation9] and define the integral of a fuzzy function using the Riemann integral concept.
Definition 6
A fuzzy function is said to be continuous for arbitrary fixed x0 ∈ [a, b] and ϵ > 0 there exists δ > 0 such that if |x − x0| < δ then
.
Definition 7
Let . For each partition P = {xo, x1, …, xn} of [a, b] and arbitrary ℑi : xi−1 ≤ ℑ i ≤ xi, i = 1, 2, …, n, let
and
. The integral of
over [a, b] is defined as follows
Proved that the limit exists in the metric D. If the fuzzy function
is continuous in the metric D, then its definite integral exists [Citation9], and also we have
It should be noted that the fuzzy integral also can be defined by using the Lebesgue-type approach [Citation10].
Definition 8
[Citation23]
is fuzzy-Riemann integrable to
if for any ɛ > 0, there exists δ > 0 such that for any division
of [a, b] with the norms Δ(P) < δ, we have
where
denotes the fuzzy summation.
Lemma 1
[Citation24] If are fuzzy continuous functions, then the function F : [a, b] → R+ by
is continuous on [a, b], and
Theorem 1
| • | The pair (E1, ⊕) is a commutative semigroup with | ||||
| • | For fuzzy numbers which are not crisp, there is no opposite element (that is, (E1, ⊕) cannot be a group). | ||||
| • | The function of || · ||F : E1 → R by | ||||
| • |
| ||||
4 Fuzzy system of Fredholm integral equation
Consider the following system of linear Fredholm integral equations(5)
(5) where
where ui(x), i = 1, 2, …, p are unknown functions, while fi(x) ∈ L2[0, 1] and the kernels ki, j(x, t) ∈ L2[0, 1], i, j = 1, 2, …, p are known functions. Clearly, if F(x) be a crisp function, then the solution of Equation(5)
(5)
(5) is crisp as well, otherwise these equations may only have fuzzy solutions. Let
and
be parametric form of F(x) and U(x), respectively. The system of the fuzzy Fredholm integral equations of the second kind in the parametric form is as follows
(6)
(6) where
and
5 Existence of the solution
In this section, we will study the solvability of the linear fuzzy Fredholm integral equation systems Eq. Equation(6)(6)
(6) . Assume that ki, j(x, t), i, j = 1, 2, …, p is continuous and therefore it is uniformly continuous with respect to t and there exists Mij > 0 such that
. Let M1 = max {Mij, i, j = 1, 2, …, p} and
be the space of fuzzy continuous functions with the metric
that it is called the uniform distance between fuzzy-number-valued functions.
Theorem 2
Let be the fuzzy continuous function and kij(x, t), i, j = 1, 2, …, p be continuous for 0 ≤ x, t ≤ 1.
If C = pM1 < 1 then the fuzzy system Eq. Equation(6)(6)
(6) has a unique solution
in Xp.
Proof
To proof this theorem we investigate the conditions of the Banach fixed point principle. First We define the operator H: Xp → Xp by
(8)
(8) We show that H maps Xp into Xp (i.e. H(Xp) ⊂ Xp). To the end, we show that the operator H is uniformly continuous. Since
is continuous on compact set of [0, 1], we deduce that it is uniformly continuous and hence for ɛi > 0, i = 1, 2, …, p exists δi > 0 such that
As described above, kij(x, t), i, j = 1, 2, …, p also is uniformly continuous, thus for ϵij > 0 exists δij > 0 such that
Let
and
. Therefore
and
So we have
Let
Therefore
By choosing
and
we derive
This shows that H is uniformly continuous for any
, and so continuous on [0, 1], and hence H(Xp) ⊂ Xp. Now, we prove that the operator H is a contraction map. So, for
and x ∈ [0, 1], we have
where
and
and thus,
. Since C < 1, the operator H is a contraction on the Banach space (Xp, D*). Consequently, the Banach fixed point principle implies that Eq. Equation(6)
(6)
(6) has a unique solution
in Xp. □
6 Approximation of linear Fredholm fuzzy integral equations system
We suppose that the system Equation(6)(6)
(6) has a unique solution. For convenience, consider the ith equation of Eq. Equation(6)
(6)
(6) as
(9)
(9) where
By using Eq. Equation(4)
(4)
(4) , we can approximate functions
,
and ki,j(x, t), i, j = 1, 2, …, p as follows
(10)
(10)
(11)
(11)
(12)
(12) where Ui, Fi are M(N + 1)-vector and Ki,j(x, t) is M(N + 1) × M(N + 1) matrix that were described in Section 2. After substituting Eqs. (10)–(12), in Eq. Equation(9)
(9)
(9) we have
(13)
(13) Therefore
So we can write system Equation(6)
(6)
(6) in the matrix form as follows
(14)
(14) where
and
are pM(N + 1)-vector in the following form
and
is pM(N + 1) × pM(N + 1) matrix as follows
where Ki,j, i, j = 1, 2, …, p and D are M(N + 1) × M(N + 1) matrix. So, we can rewrite Eq. Equation(14)
(14)
(14) as below
(15)
(15) where I is pM(N + 1) × pM(N + 1) identity matrix. After solving this linear system, we can approximate the solution of system Equation(6)
(6)
(6) with substituting Ui, i = 1, 2, …, p in Eq. Equation(10)
(10)
(10) .
7 Convergence analysis
In this section, we prove that the present numerical method converges to the exact solution.
Theorem 3
Suppose that and
are the approximate and exact solution of system Equation(6)
(6)
(6) , respectively. In the linear system Equation(6)
(6)
(6) , if ki,j(x, t), i, j = 1, 2, …, p and 0 ≤ x, t ≤ 1 are bounded and continuous, then
, as M, N→ ∞.
Proof
where
Therefore
So
thus, we have
By using Eq. Equation(1)
(1)
(1) we have
for i = 1, 2, …, p . Finally, since β is bounded, we conclude that
so the proof is completed. □
8 Numerical examples
In this section, two examples are given to certify the convergence and error bound of the presented method. All results are computed by using a program written in the Matlab. In this regard, we have presented with tables and figures.
Example 1
Consider the system of fuzzy linear Fredholm integral equations withand kernel functions
The exact solution in this case is given by
After solving this system by the proposed method with N = 1, M = 3 and r, x ∈ [0, 0.9], we see that the absolute error is zero. So the proposed method is accurate for this example.
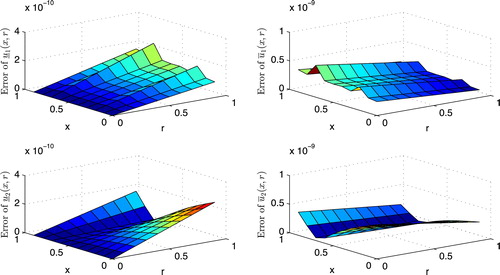
Example 2
Consider the system of fuzzy linear Fredholm integral equations withand kernel functions
The exact solution in this case is given by
and show the maximum error of
and
by the presented method for N = 2, M = 3 and M = 6, respectively. and display absolute error functions obtained by the present method for N = 2, M = 3 and M = 6, respectively.
Fig. 1 Absolute error functions obtained by the present method for N = 2 and M = 3 of Example 2.
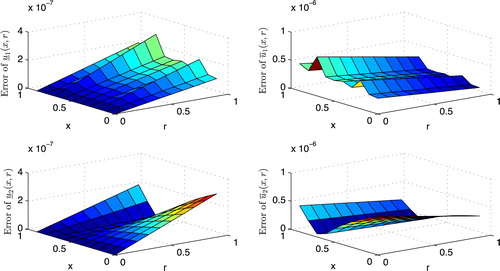
Fig. 2 Absolute error functions obtained by the present method for N = 2 and M = 6 of Example 2.
9 Conclusion
The fuzzy integral equations are important for studying and solving a large proportion of the problems in many topics in applied mathematics. In the present work the hybrid of Bernstein and block-pulse functions is used to solve linear fuzzy Fredholm integral equation systems. Also, we proved the convergence of this method. Illustrative numerical examples are included in order to test the accuracy and the convergence of the proposed method. In the above presented numerical examples we see that the proposed method well performs for system of linear fuzzy integral equations and the existence and convergence results (Theorems 2 and 3) are confirmed.
Acknowledgment
We are very grateful to an anonymous referee for the valuable comments and suggestions which have improved the manuscript.
Notes
Peer review under responsibility of Taibah University.
References
- K.MaleknejadM.Tavassoli KajaniY.MahmoudiNumerical solution of linear Fredholm and Volterra integral equation of the second kind by using Legendre waveletsJ. Sci. Islamic Repub. Iran1322003161166
- M.RazzaghiH.R.MarzbanDirect method for variational problems via hybrid of block-pulse and Chebyshev functionsMath. Prob. Eng.620008597
- M.Tavassoli KajaniA.H.VenchehSolving second kind integral equations with hybrid Chebyshev and block-pulse functionsAppl. Math. Comput.16320057177
- X.T.WangY.M.LiNumerical solutions of integro differential system by hybrid of general block-pulse functions the second Chebyshev polynomialsAppl. Math. Comput.2092009266272
- C.H.HsiaoHybrid function method for solving Fredholm and Volterra integral equations of the second kindJ. Comput. Appl. Math.23020095968
- H.R.MarzbanM.RazzaghiOptimal control of linear delay system via hybrid of block-pulse and Legendre polynomialsJ. Frank. Inst.3412004279293
- V.K.SinghR.K.PandcyS.SinghA stable algorithm for Hankel transforms using hybrid of block-pulse and Legendre polynomialsComput. Phys. Commun.1812010110
- D.DuboisH.PradeTowards fuzzy differential calculusFuzzy Sets Syst.8198217
- R.GoetschelW.VaxmanElementary calculusFuzzy Sets Syst.1819863143
- O.KalevaFuzzy differential equationsFuzzy Sets Syst.2421987301317
- S.NandaOn integration of fuzzy mappingsFuzzy Sets Syst.32198995101
- R.EzzatiS.ZiariNumerical solution and error estimation of fuzzy Fredholm integral equation using fuzzy Bernstein polynomialsAustralian J. Basic Appl. Sci.59201120722082
- M.A.Fariborzi AraghiN.ParandinNumerical solution of fuzzy Fredholm integral equations by the Lagrange interpolation based on the extension principleSoft Comput.15201124492456
- N.ParandinM.A.Fariborzi AraghiThe numerical solution of linear fuzzy Fredholm integral equations of the second kind by using finite and divided differences methodsSoft Comput.152010729741
- H.Sadeghi GogharyM.Sadeghi GogharyTwo computational methods for solving linear Fredholm fuzzy integral equations of the second kind by Adomian methodAppl. Math. Comput.1612005733744
- M.ShafieeS.AbbasbandyT.AllahviranlooPredictor–corrector method for nonlinear fuzzy Volterra integral equationsAustralian J. Basic Appl. Sci.512201128652874
- A.JafarianS.Measoomy NiaS.TavanM.BanifazelSolving linear Fredholm fuzzy integral equations system by Taylor expansion methodAppl. Math. Sci.683201241034117
- G.TachevPointwise approximation by Bernstein polynomialsBull. Aust. Math. Soc.8532012353358
- G.J.KlirU.S.ClairB.YuanFuzzy Set Theory: Foundations and Applications1997Prentice-Hall Inc.
- M.MaM.FriedmanA.KandelA new fuzzy arithmeticFuzzy Sets Syst.10819998390
- M.L.PuriD.RalescuDifferentials of fuzzy functionsJ. Math. Anal. Appl.911983552558
- M.L.PuriD.RalescuFuzzy random variablesJ. Math. Anal. Appl.114219864094
- H.C.WuThe fuzzy Riemann integral and its numerical integrationFuzzy Sets Syst.1102000125
- G.A.AnastassiouFuzzy Mathematics: Approximation Theory2010SpringerHeidelberg
- G.A.AnastassiouS.G.GalOn a fuzzy trigonometric approximation theorem of Weirstrass-typeJ. Fuzzy Math.932001701708
- A.M.BicaError estimation in the approximation of the solution of nonlinear fuzzy Fredholm integral equationsInf. Sci.178200812791292