
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
In this paper, we explore new applications of the extended method. We apply this method to the nonlinear Calogero–Bogoyavlinskii–Schiff equation of fractional order. As results, some new exact traveling wave solutions are obtained which include solitary wave solutions. The traveling wave solutions are expressed by hyperbolic and trigonometric functions.
1 Introduction
In the recent years, the exact solutions of nonlinear partial differential equations (NLPDEs) have been investigated by many authors who are interested in nonlinear phenomena which exist in all fields including either the scientific works or engineering fields, such as fluid mechanics, chemical physics, chemical kinematics, plasma physics, elastic media, optical fibers, solid state physics, biology, atmospheric and oceanic phenomena and so on. The research of traveling wave solutions of some nonlinear evolution equations derived from such fields played an important role in the analysis of some phenomena. To obtain traveling wave solutions, many effective methods have been presented in the literature, such that the homogeneous balance method [Citation1,Citation2], the hyperbolic tangent expansion method [Citation3,Citation4], the trial function method [Citation5], the tanh-function method [Citation6–Citation9], the theta function method [Citation10–Citation12], the nonlinear transform method [Citation13], the Hirota bilinear method [Citation14,Citation15], the Weierstrass elliptic function method [Citation16], the F-function expansion method [Citation17–Citation19], the inverse scattering transform [Citation20], the exp-function expansion method [Citation21], the Jacobi elliptic function expansion [Citation2,Citation11,Citation22–Citation26], the Backlund transform method [Citation27,Citation28], the generalized Riccati equation method [Citation29], the original method [Citation30], the sub-ODE method [Citation30,Citation31,Citation32,Citation33], and so on. Recently, Wang et al. [Citation30] first introduced the expansion method to look for traveling wave solutions of nonlinear evolution equations. By means of this method, Wang et al. [Citation30] and other authors obtained more traveling wave solutions of different NLPDEs. More recently, Guo and Zhou [Citation34] first proposed the extended
method based on new ansatze. Theyapplied this method to the Whitham–Broer–Kaup-Like equations and coupled Hirota–Satsuma K dV equation. Recently, Zayed et al. [Citation35] have applied the extended
method to some different nonlinear PDEs and found the exact traveling wave solutions. The objective of the present work is to apply the extended
method which has been proposed by Hayek [Citation36] for the nonlinear Calogero–Bogoyavlinskii–Schiff equation of fractional order.
2 Preliminaries and notations
We give some basic definitions and properties of the fractional calculus theory which are used further in this paper.
2.1 Definition
A real function f(t), t > 0, is said to be in the space cμ, μ ∈ R if there exists a real number p(>μ), such that f(t) = tpf1(t), where f1(t) ∈ C[0, ∞], and it is said to be in the space iff fm ∈ Cμ, m ∈ N.
2.2 Definition
The Riemann–Liouville fractional integral operator of order α ≥ 0, of a function f ∈ Cμ, μ ≥−1, is defined asproperties of the operator Jα can be found in [Citation37–Citation39], we mention only the following: For f ∈ Cμ, μ ≥−1, α, β ≥ 0 and γ >−1:
| 1. | JαJβf(t) = Jα+βf(t). | ||||
| 2. | JαJβf(t) = JβJαf(t). | ||||
| 3. | |||||
2.3 Definition
The fractional derivative of f(t) in the Caputo sense is defined asfor
.
3 Description of the extended  method
method
Suppose we have the following nonlinear PDE of the type(3.1)
(3.1) where u(ξ) = u(x, z, t) is an unknown function, P is a polynomial in u = u(x, z, t) and its various partial derivatives, in which the highest order partial derivatives and the nonlinear terms are involved.
In the following, we give the main steps of the extended method [Citation34–Citation36]:
| Step 1: | Combining the independent variables x, z and t into one variable ξ, we suppose that | ||||
| Step 2: | If possible, integrate Eq. Equation(3.3) | ||||
| Step 3: | Suppose the traveling wave solution of Eq. Equation(3.3)
| ||||
| Step 4: | The positive integer m can be determined by considering the homogeneous balance between the highest order derivatives and the nonlinear terms appearing in Eq. Equation(3.3) | ||||
| Step 5: | We substitute Eq. Equation(3.4) | ||||
| Step 6: | Since the general solution of Eq. Equation(3.5) | ||||
Remark 1
The nonzero parameter μ in Eq. Equation(3.5)(3.5)
(3.5) plays an essential role in the determination of the type of the solutions. Indeed,
| (i) | If μ < 0, then we find the hyperbolic-type solutions and we have | ||||
| (ii) | If μ > 0, then we find the trigonometric-type solutions and we have | ||||
4 Applications
In this section, we apply the extended method to construct some new traveling wave solutions of thenonlinear Calogero–Bogoyavlinskii–Schiff equation of fractional order in mathematical physics which have been paid attention by many researchers. Inspired and motivated by the ongoing research in this area, we apply the extended
method for searching its new solitary wave solutions. Let us consider the Calogero–Bogoyavlinskii–Schiff equation with fractional derivative
(4.1)
(4.1) Consider the following transformation to convert Eq. Equation(4.1)
(4.1)
(4.1) into ordinary differential equation
(4.2)
(4.2) where ω is a real constant. Substituting Eq. Equation(4.2)
(4.2)
(4.2) into Eq. Equation(4.1)
(4.1)
(4.1) and using the chain rule, we obtained the following ODE
(4.3)
(4.3) Integrating Eq. Equation(4.3)
(4.3)
(4.3) once with respect to ξ, we get
(4.4)
(4.4) where C is a constant of integration. Now balancing the term u‴ and
, yields n = 1.
Hence for n = 1, Eq. Equation(3.4)(3.4)
(3.4) reduces to
(4.5)
(4.5) where a0, a1, b1, c1, d1 are constants to be determined and G = G(ξ) satisfies Eq. Equation(3.5)
(3.5)
(3.5) .
Substituting Eq. Equation(4.5)(4.5)
(4.5) along with Eq. Equation(3.5)
(3.5)
(3.5) into Eq. Equation(4.3)
(4.3)
(4.3) , we obtain a polynomial in
. On equating the coefficients of this polynomial to zero, we get a system of algebraic equations as follows:
(4.6)
(4.6) On solving the above system of algebraic equations Equation(4.6)
(4.6)
(4.6) by Maple 13, we obtain the following results:
| Case 1: | |||||
| Case 2: | a0 = a0, a1 = 2, b1 = 0, c1 = 0, d1 = 0, ω = 4 µ, C = 0. | ||||
| Case 3: | a0 = a0, a1 = 0, b1 = 0, c1 =−2 µ, d1 = 0, ω = 4 µ, C = 0. | ||||
| Case 4: | a0 = a0, a1 = 1, b1 = b1, c1 =− µ, d1 = σb1, ω = µ, C =−15 µ 2. | ||||
| Case 5: | |||||
| Case 6: | |||||
(a) Hyperbolic function solutions
Substituting Equation(3.7)(3.7)
(3.7) into Equation(4.5)
(4.5)
(4.5) , we get the following hyperbolic traveling wave solutions:
Case 1 gives(4.7)
(4.7) where
and μ, a1 and a0 are arbitrary constants.
Case 2 gives(4.8)
(4.8) where
, and μ, a1 and a0 are arbitrary constants.
Case 3 gives(4.9)
(4.9) where
, and μ, a1 and a0 are arbitrary constants.
Case 4 gives(4.10)
(4.10) where
, and μ, a1 and a0 are arbitrary constants.
Case 5 gives(4.11)
(4.11) where
, and μ, a1 and a0 are arbitrary constants.
Case 6 gives(4.12)
(4.12) where
, and μ, a1 and a0 are arbitrary constants.
(b) Trigonometric function solutions
Substituting Equation(3.8)(3.8)
(3.8) into Equation(4.5)
(4.5)
(4.5) , we get the following trigonometric traveling wave solutions:
Case 1 gives(4.13)
(4.13) where
, and μ, a1 and a0 are arbitrary constants.
Case 2 gives(4.14)
(4.14) where
, and μ, a1 and a0 are arbitrary constants.
Case 3 gives(4.15)
(4.15) where
, and μ, a1 and a0 are arbitrary constants.
Case 4 gives(4.16)
(4.16) where
, and μ, a1 and a0 are arbitrary constants.
Case 5 gives(4.17)
(4.17) where
, and μ, a1 and a0 are arbitrary constants.
Case 6 gives(4.18)
(4.18) where
, and μ, a1 and a0 are arbitrary constants.
(c) Particular cases
(I) If μ < 0, setting A1 = 0, A2 ≠ 0 in (4.7)–(4.12), we obtain respectively the solitary wave solutions:(4.19)
(4.19)
(4.20)
(4.20)
(4.21)
(4.21)
(4.22)
(4.22)
(4.23)
(4.23)
(4.24)
(4.24) Similarly, if A2 = 0, A1 ≠ 0, we get more solitary wave solutions which are omitted.
(II) If μ < 0, setting then we deduce respectively from (4.7)–(4.12), the solitary wave solutions:
(4.25)
(4.25)
(4.26)
(4.26)
(4.27)
(4.27)
(4.28)
(4.28)
(4.29)
(4.29)
(4.30)
(4.30) where
.
(III) If μ > 0, setting A1 = 0, A2 ≠ 0 in (4.13)–(4.18), we obtain respectively the solitary wave solutions:(4.31)
(4.31)
(4.32)
(4.32)
(4.33)
(4.33)
(4.34)
(4.34)
(4.35)
(4.35)
(4.36)
(4.36) Similarly, if A2 = 0, A1 ≠ 0, we get more solitary wave solutions which are omitted.
(IV) If μ > 0, setting , then we deduce respectively from (4.13)–(4.18), the solitary wave solutions:
(4.37)
(4.37)
(4.38)
(4.38)
(4.39)
(4.39)
(4.40)
(4.40)
(4.41)
(4.41)
(4.42)
(4.42) where
.
5 Graphical illustration of some obtained solutions
Graph is a powerful tool for communication and describes lucidly the solutions of the problems. Therefore, we make graphs of obtained solutions, so that they can represent the importance of each obtained solution and physically interpret the importance of parameters. Some of our obtained traveling wave solutions are represented in – with the aid of Maple 13.
Fig. 1 2D soliton profile of Eq. Equation(4.8)(4.8)
(4.8) for different values of α.
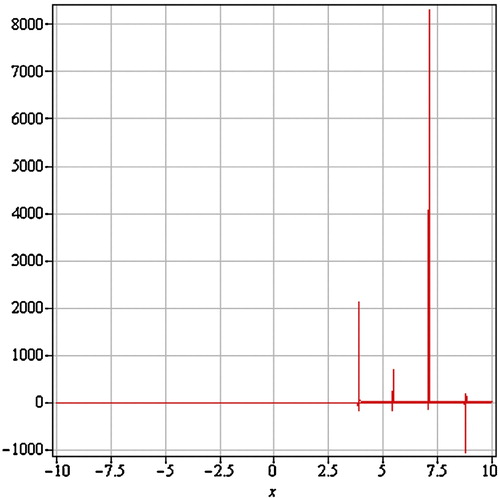
Fig. 2 3D soliton profile of Eq. Equation(4.8)(4.8)
(4.8) for different values of α.
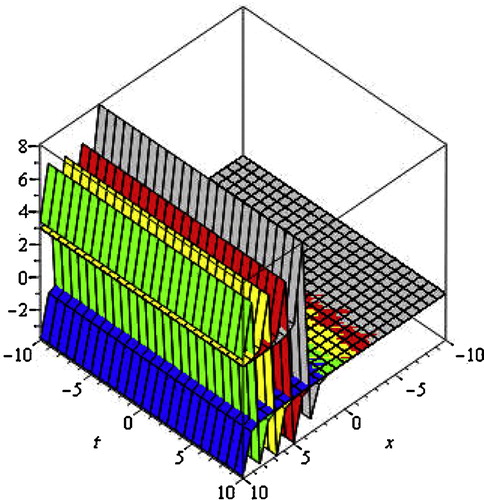
Fig. 3 2D soliton profile of Eq. Equation(4.16)(4.16)
(4.16) for different values of α.
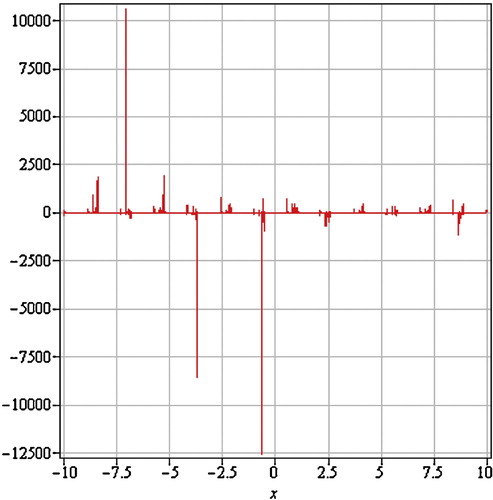
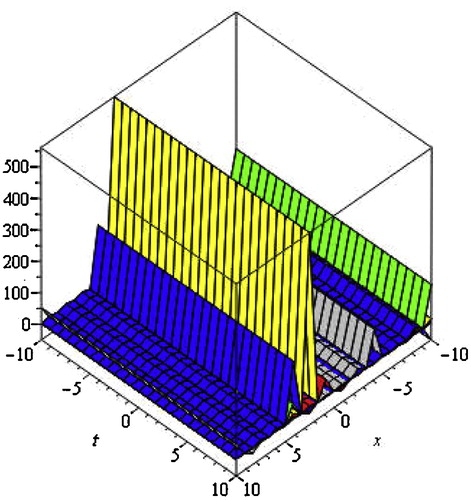
Fig. 4 3D soliton profile of Eq. Equation(4.16)(4.16)
(4.16) for different values of α.
6 Conclusions
In this paper, we applied the extended method for the nonlinear Calogero–Bogoyavlinskii–Schiff equation of fractional order. By using this method, some new traveling wave solutions of this equation are successfully obtained. These solutions include hyperbolic function solutions and trigonometric function solutions. When the parameters are taken as special values, new solitary wave solutions, periodic solutions are given. The resultshow that the extended
method is direct, effective and can be applied to many other nonlinear fractional PDEs in mathematical physics.
Notes
Peer review under responsibility of Taibah University.
References
- M.L.WangY.B.ZhouZ.B.LiApplication of homogeneous balance method to exact solutions of nonlinear equations in mathematical physicsPhys. Lett. A21619966775
- E.M.E.ZayedH.A.ZedanK.A.GepreelOn the solitary wave solutions for nonlinear Hirota–Satsuma coupled K dV equationsChaos Solitons Fractals222004285303
- L.YangJ.LiuK.YangExact solutions of nonlinear PDE, nonlinear transformations and reduction of nonlinear PDE to a quadraturePhys. Lett. A2782001267270
- E.M.E.ZayedH.A.ZedanK.A.GepreelOn the solitary wave solutions for nonlinear Euler equationsAppl. Anal.83200411011132
- N.A.KudryashovExact solutions of the generalized Kuramoto–Sivashinsky equationPhys. Lett. A1471990287
- W.MalflietSolitary wave solutions of nonlinear wave equationsJ. Am. Phys.601992650
- E.J.ParkesB.R.DuffyTravelling solitary wave solutions to a compound K dV-Burgers equationComput. Phys. Commun.981996288
- Z.Y.YanNew explicit travelling wave solutions for two new integrable coupled nonlinear evolution equationsPhys. Lett. A2922001100106
- M.L.WangX.Z.LiApplications of F-expansion to periodic wave solutions for a new Hamiltonnian amplitude equationChaos Solitons Fractals24200512571268
- K.W.ChowA class of exact, periodic solutions of nonlinear envelope equationsJ. Math. Phys.36199541254137
- E.G.FanExtended tanh-function method and its applications to nonlinear equationsPhys. Lett. A2772000212218
- E.G.FanMultiple travelling wave solutions of nonlinear evolution equations using a unified algebraic methodJ. Phys. A35200268536872
- J.L.HuA new method of exact travelling wave solution for coupled nonlinear differential equationsPhys. Lett. A3222004211216
- R.HirotaExact N-soliton solutions of the wave equation of long waves in shallow-water and in nonlinear latticesJ. Math. Phys.141973810816
- R.HirotaJ.SatsumaSoliton solutions of a coupled Korteweg–de Vries equationPhys. Lett. A851981407408
- A.V.PorubovPeriodical solution to the nonlinear dissipative equation for surface waves in a convecting liquid layerPhys. Lett. A2211996391
- M.L.WangY.B.ZhouThe periodic wave solutions for the Klein–Gordon–Schrodinger equationsPhys. Lett. A318200384
- M.L.WangX.LiExtended F-expansion and periodic wave solutions for the generalized Zakharov equationsPhys. Lett. A34320054854
- M.L.WangX.LiApplications of F-expansion to periodic wave solutions for a new Hamiltonian amplitude equationChaos Solitons Fractals24200512571268
- M.J.AblowitzP.A.ClarksonSolitons, Nonlinear Evolution Equations and Inverse. Scattering Transform1991Cambridge University PressCambridge
- J.H.HeX.H.WuExp-function method for nonlinear wave equationsChaos Solitons Fractals302006700708
- M.IncD.J.EvansOn traveling wave solutions of some nonlinear evolution equationsInt. J. Comput. Math.812004191
- S.K.LiuZ.T.FuS.D.LiuQ.ZhaoNew Jacobi elliptic function expansion and new wave solutions of nonlinear wave equationsPhys. Lett. A289200169
- Z.Y.YanAbundant families of Jacobi elliptic function solutions of the (2 + 1)-dimensional integrable Davey–Stewartson-type equation via a new methodChaos Solitons Fractals182003299
- E.M.E.ZayedH.A.ZedanK.A.GepreelA modified extended method to find a series of exact solutions for a system of complex coupled K dV equationsAppl. Anal.842005523541
- E.M.E.ZayedA.M.AbourabiaK.A.GepreelM.M.HorbatyTraveling solitary wave solutions for nonlinear coupled K dV systemChaos Solitons Fractals342007292306
- M.R.MiuraBacklund Transformation1978Springer-VerlagBerlin
- C.RogersW.F.ShadwickBacklund Transformation1982AcademicNew York
- Z.YanH.Q.ZhangNew explicit solitary wave solutions and periodic wave solutions for Whitham–Broer–Kaup equation in shallow waterPhys. Lett. A2852001355362
- M.L.WangX.Z.LiJ.L.ZhangThe expansion method and travelling wave solutions of nonlinear evolution equations in mathematical physicsPhys. Lett. A3722008417423
- Z.Y.YanH.Q.ZhangNew explicit and exact travelling wave solutions for a system of variant Boussinesq equation in mathematical physicsPhys. Lett. A2521999291296
- X.Z.LiM.L.WangA sub-ODE method for finding exact solutions of a generalized K dV–mK dV equation with high-order nonlinear termsPhys. Lett. A3612007115118
- M.L.WangX.Z.LiJ.L.ZhangSub-ODE method and solitary wave solutions for higher order nonlinear Schrodinger equationPhys. Lett. A363200796101
- S.GuoY.ZhouThe extended G′G-expansion method and its applications to the Whitham–Broer–Kaup-Like equations and coupled Hirota–Satsuma K dV equationsAppl. Math. Comput.215201032143221
- E.M.E.ZayedS.Al-JoudiApplications of an extended G′G-expansion method to find exact solutions of nonlinear PDEs in mathematical physicsMath. Probl. Eng.20102010 Article ID 768573, 19 pp.
- M.HayekConstructing of exact solutions to the K dV and Burgers equations with power-law nonlinearity by the extended G′G-expansion methodAppl. Math. Comput.2172010212221
- A.Y.LuchkoR.GrorefloThe Initial Value Problem for Some Fractional Differential Equations with the Caputo Derivative, Preprint Series A08-981998Fachbreich Mathematik und Informatik, Freic Universitat Berlin
- K.S.MillerB.RossAn Introduction to the Fractional Calculus and Fractional Differential Equations1993John Wiley and Sons Inc.New York
- K.B.OldhamJ.SpanierThe Fractional Calculus1974Academic PressNew York
- M.CaputoLinear models of dissipation whose Q is almost frequency independent. Part IIJ. R. Astron. Soc.131967529539