
Abstract
We consider a Markovian queueing system with N heterogeneous service facilities, each of which has multiple servers available, linear holding costs, a fixed value of service and a first-come-first-serve queue discipline. Customers arriving in the system can be either rejected or sent to one of the N facilities. Two different types of control policies are considered, which we refer to as ‘selfishly optimal’ and ‘socially optimal’. We prove the equivalence of two different Markov Decision Process formulations, and then show that classical M/M/1 queue results from the early literature on behavioural queueing theory can be generalized to multiple dimensions in an elegant way. In particular, the state space of the continuous-time Markov process induced by a socially optimal policy is contained within that of the selfishly optimal policy. We also show that this result holds when customers are divided into an arbitrary number of heterogeneous classes, provided that the service rates remain non-discriminatory.
after two revisions
The online version of this article is available Open Access
1. Introduction
One of the most persistent themes in the literature on behavioural queueing theory is the sub-optimality of greedy or ‘selfish’ customer behaviour in the context of overall social welfare. In order to induce the most favourable scenario for society as a whole, customers are typically required to deviate in some way from the actions that they would choose if they were motivated only by their own interests. This principle has been observed in many of the classical queueing system models, including M/M/1, GI/M/1, GI/M/s and others (see, eg, CitationNaor, 1969; CitationYechiali, 1971; CitationKnudsen, 1972; CitationYechiali, 1972; CitationLittlechild, 1974; CitationEdelson and Hildebrand, 1975; CitationLippman and Stidham, 1977; CitationStidham, 1978). More recently, this theme has been explored in applications including queues with setup and closedown times (CitationSun et al, 2010), queues with server breakdowns and delayed repairs (CitationWang and Zhang, 2011), vacation queues with partial information (CitationGuo and Li, 2013), queues with compartmented waiting space (CitationEconomou and Kanta, 2008) and routing in public services (CitationKnight et al, 2012; CitationKnight and Harper, 2013). More generally, the implications of selfish and social decision making have been studied in various applications of economics and computer science; CitationRoughgarden’s (2005) monograph provides an overview of this work and poses some open problems.
The first author to compare ‘self-optimization’ with ‘overall optimization’ in a queueing setting was CitationNaor (1969), whose classical model consists of an M/M/1 system with linear waiting costs and a fixed service value. The general queueing system that we consider in this paper may be regarded as an extension of Naor’s model to a higher-dimensional space. We consider a system with N⩾2 heterogeneous service facilities in parallel, each of which has its own queue and operates with a cost and reward structure similar to that of Naor’s single-server model (see ). In addition, we generalize the system by assuming that each facility i may serve up to ci customers simultaneously, so that we are essentially considering a network of non-identical M/M/ci queues.
Figure 1 A diagrammatic representation of the queueing system.
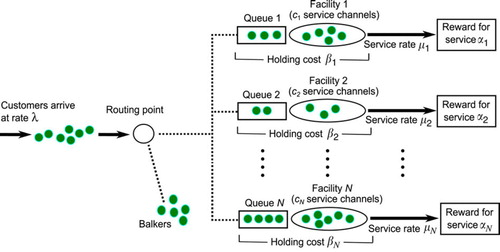
The inspiration for our work is derived primarily from public service settings in which customers may receive service at any one of a number of different locations. For example, in a healthcare setting, patients requiring a particular operation procedure might choose between various different healthcare providers (or a choice might be made on their behalf by a central authority). In this context, the ith provider is able to treat up to ci patients at once, and any further arrivals are required to join a waiting list, or seek treatment elsewhere. A further application of this work involves the queueing process at immigration control at ports and/or airports. These queues are often centrally controlled by an officer aiming to ensure that congestion is reduced. Finally, computer data traffic provides yet another application of this work. When transferring packets of data over a network, there arise instances at which choices of available servers can have a major impact on the efficacy of the entire network.
The queueing system that we consider in this work evolves stochastically according to transitions which we assume are governed by Markovian distributions. We address the problem of finding an optimal routing and admission control policy and model this as a Markov Decision Process (MDP) (see, eg, CitationPuterman, 1994) for a complete description and rigorous theoretical treatment of MDPs). CitationStidham and Weber (1993) provide an overview of MDP models for the control of queueing networks. It is well-known that optimal policies for the allocation of customers to parallel heterogeneous queues are not easy to characterize; for this reason, heuristic approaches have been developed which have achieved promising results in applications (see CitationArgon et al, 2009; CitationGlazebrook et al, 2009). In attempting to identify or approximate an optimal policy, one aims to find a dynamic decision-making scheme which optimizes the overall performance of the system with respect to a given criterion; we refer to such a scheme as a socially optimal solution to the optimization problem associated with the MDP. In this paper our objective is to draw inferences about the nature of a socially optimal solution from the structure of the corresponding selfishly optimal solution. A selfishly optimal solution may be regarded as a simple heuristic rule which optimizes a customer’s immediate outcome without giving due consideration to long-term consequences. The remaining sections in this paper are organized as follows:
In Section 2 we provide an MDP formulation of our queueing system and define all of the input parameters. We also offer an alternative formulation and show that it is equivalent.
In Section 3 we define ‘selfishly optimal’ and ‘socially optimal’ policies in more detail. We then show that our model satisfies certain conditions which imply the existence of a stationary socially optimal policy, and prove an important relationship between the structures of the selfishly and socially optimal policies.
In Section 4 we draw comparisons between the results of Section 3 and known results for systems of unobservable queues.
In Section 5 we show that the results of Section 3 hold when customers are divided into an arbitrary number of heterogeneous classes. These classes are heterogeneous with respect to demand rates, holding costs and service values, but not service rates.
Finally, in Section 6, we discuss the results of this paper and possible avenues for future research.
2. Model formulation
We consider a queueing system with N service facilities. Customers arrive from a single demand node according to a stationary Poisson process with demand rate λ>0. Let facility i (for i=1, 2, …, N) have ci identical service channels, a linear holding cost βi>0 per customer per unit time, and a fixed value of service (or fixed reward) αi>0. Service times at any server of facility i are assumed to be exponentially distributed with mean μi−1. We assume αi⩾βi/μi for each facility i in order to avoid degenerate cases where the reward for service fails to compensate for the expected costs accrued during a service time. When a customer arrives, they can proceed to one of the N facilities or, alternatively, exit from the system without receiving service (referred to as balking). Thus, there are N+1 possible decisions that can be made upon a customer’s arrival. The decision chosen is assumed to be irrevocable; we do not allow reneging or jockeying between queues. The queue discipline at each facility is first-come-first-served (FCFS). A diagrammatic representation of the system is given in .
We define to be the state space of our system, where xi (the ith component of the vector x) is the number of customers present (including those in service and those waiting in the queue) at facility i. It is assumed that the system state is always known and can be used to inform decision making.
No binding assumption is made in this paper as to whether decisions are made by individual customers themselves, or whether actions are chosen on their behalf by a central controller. It is natural to suppose that selfish decision making occurs in the former case, whereas socially optimal behaviour requires some form of central control, and the discussion in this paper will tend to be consistent with this viewpoint; however, the results in this paper remain valid under alternative perspectives (eg, socially optimal behaviour might arise from selfless co-operation between customers).
We do not assume any upper bound on the value of λ in terms of the other parameters. However, the types of policies that we consider in this work always induce system stability. For convenience, we will use the notation xi+ to denote the state which is identical to x except that one extra customer is present at facility i; similarly, when xi⩾1, we use xi− to denote the state with one fewer customer present at facility i. That is:
where ei is the ith vector in the standard orthonormal basis of
Let us discretize the system by defining:
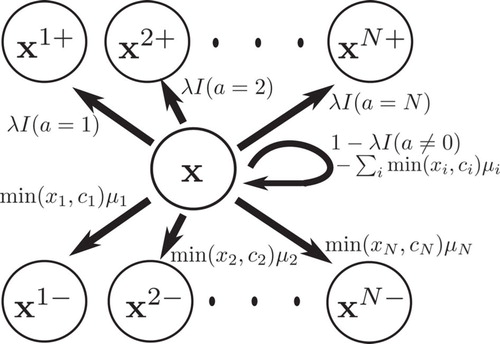
and considering an MDP which evolves in discrete time steps of size Δ. Using the well-known technique of uniformization, usually attributed to CitationLippman (1975) (see also CitationSerfozo, 1979), we can analyse the system within a discrete-time framework, in which arrivals and service completions occur only at the ‘jump times’ of the discretized process. At any time step, the probability that a customer arrives is λΔ, and the probability that a service completes at facility i is either ciμiΔ or xiμiΔ, depending on whether or not all of the channels at facility i are in use. At each time step, an action a∈{0, 1, 2, …, N} is chosen which represents the destination of any customer who arrives at that particular step; if a=0 then the customer balks from the system, and if a=i (for i∈{1, 2, …, N}) then the customer joins facility i. This leads to the following definition for the transition probabilities pxy(a) for transferring from state x to y in a single discrete time step, given that action a is chosen:
Here we have used I to denote the indicator function. Since the units of time can always be re-scaled, we may assume Δ=1 without loss of generality, and we therefore suppress Δ in the remainder of this work. illustrates these transition probabilities diagrammatically.
Figure 2 Transition probabilities (marked next to arrows) from an arbitrary state x∈S.
If the system is in some state x∈S at a particular time step, the sum of the holding costs incurred is Σi=1Nβixi; meanwhile, services are completing at an overall rate Σi=1Nmin(xi, ci)μi and the value of service at facility i is αi. This leads to the following definition for the single-step expected net reward r(x) associated with being in state x at a particular time step:
The system may be controlled by means of a policy which determines, for each the action an to be chosen after n time steps. In this paper we focus on stationary non-randomized policies, under which the action an is chosen deterministically according to the accompanying system state xn, and is not dependent on other factors (such as the history of past states and actions, or the time index n). In Section 3 it will be shown that it is always possible to find a policy of the aforementioned type which achieves optimality in our system. Let xn and an be, respectively, the state of the system and accompanying action chosen after n time steps, and let us use θ to denote the stationary policy being followed. The long-run average net reward gθ(x, r) per time step, given an initial state x0=x and reward function r, is given by:
where the dependence of xn on the previous state xn−1 and action an−1 is implicit. Before proceeding, we will show that an alternative definition of the reward function r yields the same long-run average reward (assuming that the same policy is followed). If a customer joins facility i under system state x, then their individual expected net reward, taking into account the expected waiting time, holding cost βi and value of service αi, is given by αi−βi/μi if they begin service immediately, and αi−βi(xi+1)/(ciμi) otherwise. Given that the probability of a customer arriving at any time step is λ, this suggests the possibility of a new reward function which (unlike the function r defined in (1)) depends on the chosen action a in addition to the state x:
The two reward functions in (1) and (3) look very different at first sight, but both formulations are entirely logical. The original definition in (1) is based on the real-time holding costs and rewards accrued during the system’s evolution, while the alternative formulation in (3) is based on an unbiased estimate of each individual customer’s contribution to the aggregate net reward, made at the time of their entry to the system. We will henceforth refer to the function r in (1) as the real-time reward function, and the function in (3) as the anticipatory reward function. Our first result proves algebraically that these two reward formulations are equivalent.
For any stationary policy θ we have:
where r and
are defined as in (1) and (3) respectively. That is, the long-run average net reward under θ is the same under either reward formulation.
Lemma 1
We assume the existence of a stationary distribution {πθ(x)}x∈S, where πθ(x) is the steady-state probability of being in state x∈S under the stationary policy θ and ∑x∈Sπθ(x)=1. If no such distribution exists, then the system is unstable under θ and both quantities in (4) are infinite. Under steady-state conditions, we can write:
noting, as before, that
We begin by partitioning the state space S into disjoint subsets. For each facility i∈{1, 2, …, N}, let Si denote the (possibly empty) set of states at which the action chosen under the policy θ is to join i. Then Si=Si−∪Si+, where:
We also let S0 denote the set of states at which the action chosen under θ is to balk. Now let gθ (x, r) and
By referring to (1) and (3), it can be checked that gθ(x,r)=gθ+(x,r)+gθ−(x,r) and
Using the detailed balance equations for ergodic Markov chains under steady-state conditions (see, eg, CitationCinlar, 1975) we may assert that for every facility i and k⩾0, the total flow from all states x∈S with xi=k up to states with xi=k+1 must equal the total flow from states with xi=k+1 down to xi=k. Hence:
Summing over all
which holds for i∈{1, 2, …, N}. The physical interpretation of (6) is that, under steady-state conditions, the rate at which customers join facility i is equal to the rate at which service completions occur at i. Multiplying both sides of (6) by αi and summing over i∈{1, 2, …, N}, we have:
which states that
Suppose we multiply both sides of (7) by ci+1. Since the sum on the left-hand side is over
We can write similar expressions with k=ci+1, ci+2 and so on. Recall that
Note also that multiplying both sides of (5) by βi/μi and summing over all k<ci (and recalling that
Hence, from (9) and (10) we have:
Summing over i∈{1, 2, …, N} gives
Proof
It follows from Lemma 1 that any policy which is optimal among stationary policies under one reward formulation (either r or ) is likewise optimal under the other formulation, with the same long-run average reward. The interchangeability of these two reward formulations will assist us in proving later results.
3. Containment of socially optimal policies
Let us define what we will refer to as ‘selfishly optimal’ and ‘socially optimal’ policies. The terminology used in this paper is slightly incongruous to that which is typically found in the literature on MDPs, and the main reason for this is that we wish to draw analogies with the work of CitationNaor (1969). The policies which we describe as ‘socially optimal’ are those which satisfy the well-known Bellman optimality equations of dynamic programming (introduced by CitationBellman, 1957), and would be referred to by many authors simply as ‘optimal’ policies; on the other hand, the ‘selfishly optimal’ policies that we will describe could alternatively be referred to as ‘greedy’ or ‘myopic’ policies.
We begin with selfishly optimal policies. Suppose that each customer arriving in the system is allowed to make his or her own decision (as opposed to being directed by a central decision-maker). It is assumed throughout this work that the queueing system is fully observable and therefore the customer is able to observe the exact state of the system, including the length of each queue and the occupancy of each facility (the case of unobservable queues is a separate problem; see, eg, CitationBell and Stidham, 1983; CitationHaviv and Roughgarden, 2007; CitationShone et al, 2013). Under this scenario, a customer may calculate their expected net reward (taking into account the expected cost of waiting and the value of service) at each facility based on the number of customers present there using a formula similar to (3); if they act selfishly, they will simply choose the option which maximizes this expected net reward. If the congestion level of the system is such that all of these expected net rewards are negative, we assume that the (selfish) customer’s decision is to balk. This definition of selfish behaviour generalizes Naor’s simple decision rule for deciding whether to join or balk in an M/M/1 system. We note that since the FCFS queue discipline is assumed at each facility, a selfish customer’s behaviour depends only on the existing state, and is not influenced by the knowledge that other customers act selfishly.
Taking advantage of the ‘anticipatory’ reward formulation in (3), we can define a selfishly optimal policy by:
In the case of ties, we assume that the customer joins the facility with the smallest index i; however, balking is never chosen over joining facility i when This is in keeping with Naor’s convention.
A socially optimal policy, denoted θ*, is any policy which maximizes the long-run average net reward defined in (2). The optimality equations for our system, derived from the classical Bellman optimality equations for average reward problems (see, eg, CitationPuterman, 1994) and assuming the real-time reward formulation in (1), may be expressed as:
where h(x) is a relative value function and g* is the optimal long-run average net reward. (We adopt the notational convention that x0+=x to deal with the case where balking is optimal in (11).) Under the anticipatory reward formulation in (3) these optimality equations are similar except that r(x) is replaced by , which must obviously be included within the maximization operator. Indeed, by adopting
as our reward formulation we may observe the fundamental difference between the selfishly and socially optimal policies: the selfish policy simply maximizes the immediate reward
, without taking into account the extra term h(xa+); this is why it may be called a myopic policy. The physical interpretation is that under the selfish policy, customers consider only the outcome to themselves, without taking into account the implications for future customers, who may suffer undesirable consequences as a result of their behaviour.
In this work we assume an infinite time horizon, but we use the method of successive approximations (see CitationRoss, 1983) to treat the infinite horizon problem as the limiting case of a finite horizon problem. We therefore state the finite horizon optimality equations corresponding to the infinite horizon equations in (11):
where v*n(x) is the maximal expected total reward from a problem with n time steps, given an initial state x∈S (we define v*0(x)=0 for all x∈S).
It has already been shown (Lemma 1) that, in an infinite-horizon problem, a stationary policy earns the same long-run average reward under either of the reward formulations r and
Remark
Given that selfish customers refuse to choose facility i if it follows that for i=1, 2, …, N there exists an upper threshold bi which represents the greatest possible number of customers at i under steady-state conditions. The value bi can be derived from (3) as:
where denotes the integer part. Two important ways in which the selfishly optimal policy
differs from a socially optimal policy are as follows:
The decisions made under
The threshold bi (representing the steady-state maximum occupancy at i) is independent of the parameters for the other facilities j≠i.
Because of the thresholds bi, a selfishly optimal policy induces an ergodic Markov chain defined on a finite set of states
Formally, we have:
We will refer to as the selfishly optimal state space. Note that, due to the convention that the facility with the smallest index i is chosen in the case of a tie between the expected net rewards at two or more facilities, the selfishly optimal policy
is unique in any given problem. Changing the ordering of the facilities (and thereby the tie-breaking rules) affects the policy
but does not alter the boundaries of
Let denote the set of positive recurrent states belonging to the Markov chain induced by a socially optimal policy θ* satisfying the optimality equations in (11). The main result to be proved in this section is that
is not only finite, but must also be contained in
.
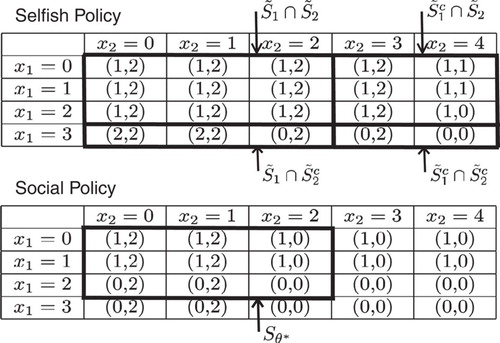
Consider a system with demand rate λ=12 and only two facilities. The first facility has two channels available (c1=2) and a service rate μ1=5, holding cost β1=3 and fixed reward α1=1. The parameters for the second facility are c2=2, μ2=1, β2=3 and α2=3, so it offers a higher reward but a slower service rate. We can uniformize the system by taking Δ=1/24, so that (λ+∑iciμi)Δ=1. The selfishly optimal state space
Figure 3 Selfishly and socially optimal policies for Example 1.
Note: For each state
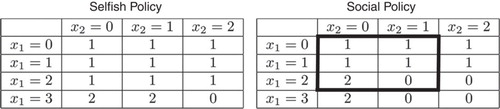
By comparing the tables in we may observe the differences between the policies
Example 1
It is known that for a general MDP defined on an infinite set of states, an average reward optimal policy need not exist, and that even if such a policy exists, it may be non-stationary. In Citation1983, Ross provides counter-examples to demonstrate both of these facts. Thus, it is desirable to establish the existence of an optimal stationary policy before aiming to examine its properties. Our approach in this section is based on the results of CitationSennott (1989), who has established sufficient conditions for the existence of an average reward optimal stationary policy for an MDP defined on an infinite state space (this problem has also been addressed by other authors; see, eg, CitationZijm, 1985; CitationCavazos-Cadena, 1989). We will proceed to show that Sennott’s conditions are satisfied for our system, and then deduce that for any socially optimal policy θ*, must be contained in
Sennott’s approach is based on the theory of discounted reward problems, in which a reward earned n steps into the future is discounted by a factor γn, where 0<γ<1. A policy θ is said to be γ-discount optimal if it maximizes the total expected discounted reward (abbreviated henceforth as TEDR) over an infinite time horizon, defined (for reward function
) as:
Let θ*γ denote an optimal policy under discount rate γ, and let be the corresponding TEDR, so that
It is known that
satisfies the discount optimality equations (see CitationPuterman, 1994):
We proceed to show that in our system, the discount optimal value function v*γ satisfies conditions which are sufficient for the existence of an average reward optimal stationary policy. In the proofs of the upcoming results, we adopt the anticipatory reward function defined in (3).
For every statex∈S and discount rate 0<γ<1:
Lemma 2
Let θ0 be the trivial policy of balking under every state. Each reward
Proof
The next result establishes an important monotonicity property of the function which, incidentally, does not hold for its counterpart
under the real-time reward formulation (1).
For every statex∈S, discount rate 0<γ<1 and facility i∈{1, 2, …, N}, we have:
Lemma 3
We rely on the finite horizon optimality equations (for discounted problems) and prove the result using induction on the number of stages. The finite horizon optimality equations are:
It is sufficient to show that for each state x∈S, discount rate 0<γ<1, facility i∈{1, 2, …, N} and integer n⩾0:
We define
Indeed, let
Now let us assume that (16) also holds for n=k, where k⩾1 is arbitrary, and aim to show
Note that the indicator term in (17) arises because, under state xi+, there may (or may not) be one extra service in progress at facility i, depending on whether or not xi<ci. Recall that we assume λ+Σi=1Nciμi=1, hence (1−λ−Σj=1Nmin(xj,cj)μj−I(xi<ci)μi) must always be non-negative. We also have
Here, let a* be a maximizing action on the left-hand side, that is
By the monotonicity of
Hence the left-hand side of (18) is bounded above by
Proof
We require another lemma to establish a state-dependent lower bound for the relative value function h.
For everyx∈S, there exists a value M(x)>0 such that, for every discount rate 0<γ<1:
where0denotes the ‘empty system’ state, (0, 0, …, 0).
Lemma 4
Let αmax=maxi∈{1, 2, …, N}αi denote the maximum value of service across all facilities. For each discount rate 0<γ<1 and policy θ, let us define a new function wθ,γ by:
By comparison with the definition of vθ,γ in (14), we have:
and since the subtraction of a constant from each single-step reward does not affect our optimality criterion, we also have:
where
Consider x=0i+, for an arbitrary i∈{1, 2, …, N}. Using (20) we have, for all actions a:
In particular, if the action a=0 is to balk then
Then, since γ⩽1 and by the non-positivity of
From (19) and (21) we derive:
so we have a lower bound for
We have ψ(0)=0 and, from (22), ψ(0i+)=μi−1 for i=1, 2, …, N. Let us aim to show that (23) holds for an arbitrary x≠0, under the assumption that for all j∈{1, 2, …, N} with xj⩾1, (23) holds for the state xj−. Using similar steps to those used for 0i+ earlier, we have:
and hence:
Then, using our inductive assumption that, for each j∈{1,2,…,N},
Using (19), we conclude that the right-hand side of (24) is also a lower bound for
with the result that
Proof
For all statesx∈S and actions a∈{0, 1, 2, …, N}:
Where−M(y) is the lower bound for
Lemma 5
This is immediate from Lemma 4 since, for any x∈S, the number of ‘neighbouring’ states y that can be reached via a single transition from x is finite (regardless of the action chosen), and each M(y) is finite. □
Proof
The results presented in this section thus far confirm that our system satisfies CitationSennott’s (1989) conditions for the existence of an average reward optimal stationary policy. We now state this as a theorem.
Consider a sequence of discount rates (γn) converging to 1, with
exists, and the stationary policy θ* is average reward optimal. Furthermore, the policy θ* yields an average reward
Theorem 1
We refer to CitationSennott (1989), who presents four assumptions which (together) are sufficient for the existence of an average reward optimal stationary policy in an MDP with an infinite state space. From Lemma 2 we have
Proof
Our next result establishes the containment property of socially optimal policies which we alluded to earlier in this section.
There exists a stationary policy θ* which satisfies the average reward optimality equations and which induces an ergodic Markov chain on some finite set
Theorem 2
Informally, we say ‘the socially optimal state space is contained within the selfishly optimal state space’.
From the definition of
that is, joining i is preferable to balking at state x. Given that xi=bi, we have
Proof
Having shown that some socially optimal policy exists which induces a Markov chain with a positive recurrent class of states contained in , we proceed to show that, in fact, any socially optimal policy has this property.
Any stationary policy θ* which maximizes the long-run average reward defined in (2) induces an ergodic Markov chain on some set of states contained in
Lemma 6
Suppose, for a contradiction, that we have a stationary policy θ which maximizes (2) and
Initially, x(0)=y(0)=x0. Let t1 denote the first time, during the system’s evolution, that the first process is in state
Using similar arguments, we can say that if t2 denotes the time of the next visit (after u1) of the first process to state
Proof
Theorem 1 may be regarded as a generalisation of a famous result which is due to Naor. In Citation1969, Naor shows (in the context of a single M/M/1 queue) that the selfishly optimal and socially optimal strategies are both threshold strategies, with thresholds ns and no, respectively, and that no⩽ns. This is the M/M/1 version of the containment property which we have proved for multiple, heterogeneous facilities (each with multiple service channels allowed). We also note that Theorem 1 assures us of being able to find a socially optimal policy by searching within the class of stationary policies which remain ‘contained’ in the finite set . This means that we can apply the established techniques of dynamic programming (eg, value iteration, policy improvement) by restricting the state space so that it only includes states in
; any policy that would take us outside
can be ignored, since we know that such a policy would be sub-optimal. For example, when implementing value iteration, we loop over all states in
on each iteration and simply restrict the set of actions so that joining facility i is not allowed at any state x with xi=bi. This ‘capping’ technique enables us to avoid the use of alternative techniques which have been proposed in the literature for searching for optimal policies on infinite state spaces (see, eg, the method of ‘approximating sequences’ proposed by CitationSennott (1991), or CitationHa’s (1997) method of approximating the limiting behaviour of the value function).
4. Comparison with unobservable systems
The results proved in Section 3 bear certain analogies to results which may be proved for systems of unobservable queues, in which routing decisions are made independently of the state of the system. In this section we briefly discuss the case of unobservable queues, in order to draw comparisons with the observable case. Comparisons between selfishly and socially optimal policies in unobservable queueing systems have already received considerable attention in the literature (see, eg, CitationLittlechild, 1974; CitationEdelson and Hildebrand, 1975; CitationBell and Stidham, 1983; CitationHaviv and Roughgarden, 2007; CitationKnight and Harper, 2013).
Consider a multiple-facility queueing system with a formulation identical to that given in Section 2, but with the added stipulation that the action an chosen at time step n must be selected independently of the system state xn. In effect, we assume that the system state is hidden from the decision-maker. Furthermore, the decision-maker lacks the ability to ‘guess’ the state of the system based on the waiting times of customers who have already passed through the system, and must simply assign customers to facilities according to a vector of routing probabilities (p1, p2, …, pN) which remains constant over time. We assume that Σi=1Npi⩽1, where pi is the probability of routing a customer to facility i. Hence, p0≔1−Σi=1Npi is the probability that a customer will be rejected.
Naturally, the arrival process at facility i∈{1, 2, …, N} under a randomized admission policy is a Poisson process with demand rate λi:=λpi, where (as before) λ is the demand rate for the system as a whole. Let gi(λi) denote the expected average net reward per unit time at facility i, given that it operates with a Poisson arrival rate λi. Then:
where Li(λi) is the expected number of customers present at i under demand rate λi. In this context, a socially optimal policy is a vector (λ*1,λ*2, …,λ*N) which maximizes the sum Σi=1Ngi(λ*i). On the other hand, a selfishly optimal policy is a vector which causes the system to remain in equilibrium, in the sense that no self-interested customer has an incentive to deviate from the randomized policy in question (see CitationBell and Stidham, 1983, p 834). More specifically, individual customers make decisions according to a probability distribution
(where
for each i∈{1, 2, …, N}) and, in order for equilibrium to be maintained, it is necessary for all of the actions chosen with non-zero probability to yield the same expected net reward.
First of all, it is worth making the point that no theoretical upper bound exists for the number of customers who may be present at any individual facility i under a Poisson demand rate λi which is independent of the system state (unless, of course, λi=0). Indeed, standard results for M/M/c queues (see CitationGross and Harris, 1998, p 69) imply that the steady-state probability of n customers being present at a facility with a positive demand rate is positive for each n⩾0. As such, the positive recurrent state spaces under the selfishly and socially optimal policies are both unbounded in the unobservable case, and there is no prospect of being able to prove a ‘containment’ result similar to that of Theorem 2. However, it is straightforward to prove an alternative result involving the total effective admission rates under the two policies which is consistent with the general theme of socially optimal policies generating ‘less busy’ systems than their selfish counterparts.
illustrates the general shapes of the expected net reward for an individual customer (henceforth denoted wi(λi)) and the expected long-run average reward gi(λi) as functions of the Poisson queue-joining rate λi at an individual facility i. Naturally, wi(λi) is a strictly decreasing function of λi and, assuming that the demand rate for the system is sufficiently large, the joining rate at facility i under an equilibrium (selfish) policy is the unique value which equates wi(λi) to zero. Indeed, if this were not the case, then a selfish customer would deviate from the equilibrium policy by choosing to join the queue with probability 1 (if wi(λi) was positive) or balk with probability 1 (if wi(λi) was negative). On the other hand, it is known from the queueing theory literature (see CitationGrassmann, 1983; CitationLee and Cohen, 1983) that the expected queue length Li(λi) is a strictly convex function of λi, and hence the function gi(λi) in (27) is strictly concave in λi. Under a socially optimal policy, the joining rate at facility i is the unique value λ*i which maximizes gi(λi) (assuming, once again, that the demand rate for the system as a whole is large enough to permit this flow of traffic at facility i).
Figure 4 The general shapes of wi(λi) and gi(λi) as functions of λi.
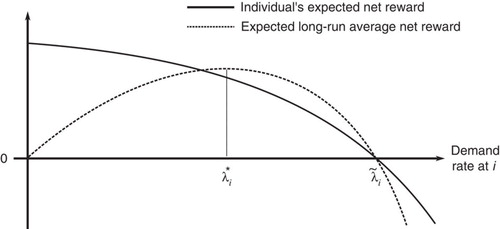
It is worth noting that the theory of non-atomic routing games (see CitationRoughgarden, 2005) assures us that the equilibrium and socially optimal policies both exist and are unique. This allows a simple argument to be formed in order to show that the sum of the joining rates at the individual facilities under a socially optimal policy (let us denote this by η*) cannot possibly exceed the corresponding sum under an equilibrium policy (denoted . Indeed, it is clear that if the system demand rate λ is sufficiently large, then the selfishly and socially optimal joining rates at any individual facility i will attain their ‘ideal’ values
and λ*i (as depicted in ), respectively, and so in this case it follows trivially that
. On the other hand, suppose that λ is not large enough to permit wi(λi)=0 for all facilities i. In this case, wi(λi) must be strictly positive for some facility i, and therefore the probability of a customer balking under an equilibrium strategy is zero (since balking is unfavourable in comparison to joining facility i). Hence, one has
in this case, and since η* is also bounded above by λ the result
follows.
The conclusion of this section is that, while the ‘containment’ property of observable systems proved in Section 3 does not have an exact analogue in the unobservable case, the general principle that selfish customers create ‘busier’ systems still persists (albeit in a slightly different guise).
5. Heterogeneous customers
An advantage of the anticipatory reward formulation in (3) is that it enables the results from Section 3 to be extended to a scenario involving heterogeneous customers without a re-description of the state space S being required. Suppose we have M⩾2 customer classes, and customers of the ith class arrive in the system via their own independent Poisson process with demand rate λi (i=1, 2, .., M). In this case we assume, without loss of generality, that ∑iλi+∑jcjμj=1. For convenience we will define λ:=∑iλi as the total demand rate. We allow the holding costs and fixed rewards in our model (but not the service rates) to depend on these customer classes; that is, the fixed reward for serving a customer of class i at facility j is now αij, and the holding cost (per unit time) is βij. Various physical interpretations of this model are possible; for example, suppose we have a healthcare system in which patients arrive from various different geographical locations. Then the parameters αij and βij may be configured according to the distance of service provider j from region i (among other factors), so that patients’ commuting costs are taken into account.
Suppose we wanted to use a ‘real-time’ reward formulation, similar to (1), for the reward r(⋅) in our extended model. Then the system state would need to include information about the classes of customers in service at each facility, and also the total number of customers of each class waiting in each queue. However, using an ‘anticipatory’ reward formulation, we can allow the state space representation to be the same as before; that is, , where xj is simply the number of customers present (irrespective of class) at facility j, for j=1, 2, …, N. On the other hand, the set of actions A available at each state x∈S has a more complicated representation. We now define A as follows:
That is, the action a is a vector which prescribes, for each customer class i∈{1, 2, …, M}, the destination ai of any customer of class i who arrives at the present epoch of time, with the system having been uniformized so that it evolves in discrete time steps of size Δ=(∑iλi+∑jcjμj)−1. The reward for taking action a∈A at state x is then:
where ai is the ith component of a, and:
for i=1, 2 …, M. We note that expanding the action set in this manner is not the only possible way of formulating our new model (with heterogeneous customers) as an MDP, but it is the natural extension of the formulation adopted in the previous section. An alternative approach would be to augment the state space so that information about the class of the most recent customer to arrive is included in the state description; actions would then need to be chosen only at arrival epochs, and these actions would simply be integers in the set {0, 1, …, N} as opposed to vectors (see CitationPuterman, 1994, p 568) for an example involving admission control in an M/M/1 queue). By keeping the state space S unchanged, however, we are able to show that the results of Section 3 can be generalized very easily.
Under our new formulation, the discount optimality equations (using the anticipatory reward functions ) are as follows:
Note that the maximization in (28) can be carried out in a componentwise fashion, so that instead of having to find the maximizer among all vectors a in A (of which the total number is (N+1)M), we can simply find, for each customer class i∈M, the ‘marginal’ action ai which maximizes . This can be exploited in the implementation of dynamic programming algorithms (eg, value iteration), so that computation times increase only in proportion to the number of customer classes M.
As before, we define the selfishly optimal policy to be the policy under which the action chosen for each customer arriving in the system is the action which maximizes (obviously this action now depends on the customer class). A selfish customer of class i accepts service at facility j if and only if, prior to joining, the number xj of customers at facility j, satisfies xj⩽bij, where:
Consequently, under steady-state conditions, the number of customers present at facility j is bounded above by maxibij. It follows that we now have the following definition for the selfishly optimal state space :
We modify Example 1 from earlier so that there are now two classes of customer, with demand rates λ1=12 and λ2=10 respectively. The first class has the same cost and reward parameters as in Example 1; that is, β11=3, α11=1 (for the first facility) and β12=3, α12=3 (for the second facility). The second class of customer has steeper holding costs and a much greater value of service at the second facility: β21=β22=5, α21=1, α22=12. Both facilities have two service channels and the service rates μ1=5 and μ2=1 remain independent of customer class. We take Δ=(∑iλi+∑jcjμj)−1=1/34 to uniformize the system.
We have previously seen that customers of the first class acting selfishly will cause the system state to remain within a set of 12 states under steady-state conditions, withx1⩽3 andx2⩽2 at all times. The incorporation of a second class of customer has no effect on the selfish decisions made by the first class of customer, so (as shown in ) these decisions remain the same as shown in previously. The first table in shows that selfish customers of the second class are unwilling to join the first facility whenx1⩾2; however, under certain states they will choose to join the second facility whenx2=3 (but never when x2>3). As a result, the selfish state space
Figure 5 Selfishly and socially optimal policies for Example 2.
Note: At each state x=(x1, x2), the corresponding decision vector a=(a1, a2) is shown.
shows that the new selfish state space
It is somewhat interesting to observe that
The policy θ* depicted in the second table in has been obtained using value iteration, and illustrates the containment property for systems with heterogeneous customer classes. It may easily be seen that the socially optimal state space
Example 2
It can be verified that the results of Lemmas 2–5, Theorems 1–2 and Lemma 6 apply to the model with heterogeneous customers, with only small modifications required to the proofs. For example, in Lemma 3 we prove the inequality by showing that, for all classes i∈{1, 2,…, M} and facilities j∈{1, 2, …, N}, we have:
for all . In Lemma 4, we can define αmax=maxi,jαij and establish a lower bound for
similar to (22) by writing
and
instead of
and
respectively (so that the action at state 0j+ is the zero vector 0, ie all customer classes balk); the rest of the inductive proof goes through using similar adjustments. Theorem 2 holds because if
was not contained in
, then the discount optimality equations would imply, for some i∈{1, 2, …, M} and j∈{1, 2, …, N}:
with , thus contradicting the result of (the modified) Lemma 3. The sample path argument in Lemma 6 can be applied to a customer of any class, with only trivial adjustments needed.
6. Conclusions
The principle that selfish users create busier systems is well-observed in the literature on behavioural queueing theory. While this principle is interesting in itself, we also believe that it has the potential to be utilized much more widely in applications. As we have demonstrated, the search for a socially optimal policy may be greatly simplified by reducing the search space according to the bounds of the corresponding ‘selfish’ policy, so that the methods of dynamic programming can be more easily employed.
Our results in this paper hold for an arbitrary number of facilities N, and (in addition) the results in Section 5 hold for an arbitrary number of customer classes M. This lack of restriction makes the results powerful from a theoretical point of view, but we must also point out that in practice, the ‘curse of dimensionality’ often prohibits the exact computation of optimal policies in large-scale systems, even when the state space can be assumed finite. This problem could be partially addressed if certain structural properties (eg monotonicity properties) of socially optimal policies could be proved with the same level of generality as our ‘containment’ results. It can be shown trivially that selfish policies are monotonic in various respects (eg, balking at the state x implies balking at state xj+, for any facility j) and, indeed, the optimality of monotone policies is a popular theme in the literature, although in our experience these properties are usually not trivial to prove for an arbitrary number of facilities. In future work, we intend to investigate how the search for socially optimal policies can be further simplified by exploiting their theoretical structure.
References
- ArgonNTDingLGlazebrookKDZiyaSDynamic routing of customers with general delay costs in a multiserver queuing systemProbability in the Engineering and Informational Sciences200923217520310.1017/S0269964809000138
- BellCEStidhamSIndividual versus social optimization in the allocation of customers to alternative serversManagement Science198329783183910.1287/mnsc.29.7.831
- BellmanREDynamic Programming1957
- Cavazos-CadenaRWeak conditions for the existence of optimal stationary policies in average markov decision chains with unbounded costsKybernetika1989253145156
- CinlarEIntroduction to Stochastic Processes1975
- EconomouAKantaSOptimal balking strategies and pricing for the single server Markovian queue with compartmented waiting spaceQueueing Systems200859323726910.1007/s11134-008-9083-8
- EdelsonNMHildebrandDKCongestion tolls for poisson queuing processesEconometrica1975431819210.2307/1913415
- GlazebrookKDKirkbrideCOuennicheJIndex policies for the admission control and routing of impatient customers to heterogeneous service stationsOperations Research200957497598910.1287/opre.1080.0632
- GrassmannWThe convexity of the mean queue size of the M/M/c queue with respect to the traffic intensityJournal of Applied Probability198320491691910.1017/S0021900200024244
- GrossDHarrisCFundamentals of Queueing Theory1998
- GuoPLiQStrategic behavior and social optimization in partially-observable Markovian vacation queuesOperations Research Letters201341327728410.1016/j.orl.2013.02.005
- HaAOptimal dynamic scheduling policy for a make-to-stock production systemOperations Research1997451425310.1287/opre.45.1.42
- HavivMRoughgardenTThe price of anarchy in an exponential multi-serverOperations Research Letters200735442142610.1016/j.orl.2006.09.005
- KnightVAHarperPRSelfish routing in public servicesEuropean Journal of Operational Research2013230112213210.1016/j.ejor.2013.04.003
- KnightVAWilliamsJEReynoldsIModelling patient choice in healthcare systems: Development and application of a discrete event simulation with agent-based decision makingJournal of Simulation2012629210210.1057/jos.2011.21
- KnudsenNCIndividual and social optimization in a multiserver queue with a general cost-benefit structureEconometrica197240351552810.2307/1913182
- LeeHLCohenAMA note on the convexity of performance measures of M/M/c Queueing systemsJournal of Applied Probability198320492092310.1017/S0021900200024256
- LippmanSAApplying a new device in the optimisation of exponential queueing systemsOperations Research197523468771010.1287/opre.23.4.687
- LippmanSAStidhamSIndividual versus social optimization in exponential congestion systemsOperations Research197725223324710.1287/opre.25.2.233
- LittlechildSCOptimal arrival rate in a simple queueing systemInternational Journal of Production Research197412339139710.1080/00207547408919563
- NaorPThe regulation of queue size by levying tollsEconometrica1969371152410.2307/1909200
- PutermanMLMarkov Decision Processes—Discrete Stochastic Dynamic Programming1994
- RossSMIntroduction to Stochastic Dynamic Programming1983
- RoughgardenTSelfish Routing and the Price of Anarchy2005
- SennottLIAverage cost optimal stationary policies in infinite state markov decision processes with unbounded costsOperations Research198937462663310.1287/opre.37.4.626
- SennottLIValue iteration in countable state average cost markov decision processes with unbounded costsAnnals of Operations Research199128126127210.1007/BF02055585
- SerfozoRAn equivalence between continuous and discrete time Markov decision processesOperations Research197927361662010.1287/opre.27.3.616
- ShoneRKnightVAWilliamsJEComparisons between observable and unobservable M/M/1 queues with respect to optimal customer behaviorEuropean Journal of Operational Research2013227113314110.1016/j.ejor.2012.12.016
- StidhamSSocially and individually optimal control of arrivals to a GI/M/1 queueManagement Science197824151598161010.1287/mnsc.24.15.1598
- StidhamSWeberRRA survey of Markov decision models for control of networks of queuesQueueing Systems199313129131410.1007/BF01158935
- SunWGuoPTianNEquilibrium threshold strategies in observable queueing systems with setup/closedown timesCentral European Journal of Operations Research201018324126810.1007/s10100-009-0104-4
- WangJZhangFEquilibrium analysis of the observable queues with balking and delayed repairsApplied Mathematics and Computation201121862716272910.1016/j.amc.2011.08.012
- YechialiUOn optimal balking rules and toll charges in the GI/M/1 queuing processOperations Research197119234937010.1287/opre.19.2.349
- YechialiUCustomers’ optimal joining rules for the GI/M/s queueManagement Science197218743444310.1287/mnsc.18.7.434
- ZijmHThe optimality equations in multichain denumerable state markov decision proceses with the average cost criterion: The bounded cost caseStatistics and Decisions198531143165