
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
This paper presents a stability analysis of network-controlled direct current (DC) position servo system with time-delays (TDs). The usage of communication links and measurement devices in the network-controlled system involves a considerable amount of TDs. Those TDs would degrade the dynamic performance and causes instability to the DC position servo system. A less conservative delay-dependent stability (DDS) criterion is presented by using Lyapunov–Krasvoskii functional and linear matrix inequality techniques. The maximum allowable TD called delay margin (DM) is computed, which can be used to tune a proportional-integral (PI) controller of the DC position servo system. Two cases of TD are considered in this analysis: time-invariant and time-varying delays. The DDS approach is used to study the trade-off between the PI controller gains and the DMs. This approach together with numerical simulation gives the insightful trade-off between DM and dynamic performance of the system. Finally, the stability of the DC position servo system with PI controller is analysed in the presence of TD through the experimental setup.
1. Introduction
The direct current (DC) position servo system is used in industry for many applications such as robotics, process control, antenna positioning, etc. The usage of network-controlled techniques to the DC position servo system provides the application of long-distance control [Citation1]. The conventional network-controlled schemes involve dedicated communication channels for transmitting data between the controller and the plant. The network-controlled DC position servo system involves transmitting measured data from the controller to the plant and vice-versa. Although there is a time-delay (TD) introduced in the system, such a TD is usually ignored during design and operation of the network-controlled DC position servo system. The future usage of open communication channel for network-controlled systems involves both time-invariant and time-varying delays (TVDs) [Citation2,Citation3].
TDs become a significant issue in network control systems (NCSs). These TDs are due to the geological distance between controller and plant or may due to network traffic or network congestion [Citation4]. Further, the usage of sensors, actuators, and other relevant instrumentation which naturally leads to the existence of the TD in the feedback as well as the forward path of the control loop. It is well known that the presence of TD in dynamical systems may often lead to instability [Citation5]. The DC motor installed with communication channel is a typical TD system. However, unavoidable TD will affect the stability when the system is operated through the network. Hence, TD affects the stability of the overall closed-loop control system. This naturally leads to doing an investigation of the effect of TD on the system's stability [Citation6–13].
For stability analysis and design of the controller for TD system, it is mandatory to compute the maximum value of TD up to which the system can be retained stable is denoted as delay margin (DM) [Citation14,Citation15]. There are two methods for determining the stability and computing the DM of the TD systems: namely time-domain methods and frequency domain methods. In [Citation16], frequency-domain method is used to compute the DM of the load frequency control system with constant delay. The results obtained from this method are exact delay bounds. However, this method is not a generalized one and it is system-specific and restricted with constant delays. Time-domain methods are used to develop a generalized method for TD systems to compute the DMs for various delay effects such as time-invariant delay, TVD, and multiple delays [Citation17–19]. The most existing approaches on TD systems are delay-dependent stability (DDS) approach and delay-independent stability approach. From literature, it is evident that results derived from DDS approach are less conservative than the delay-independent approach for considering the additional information of the TD [Citation4,Citation20–24].
In the past few decades, research works have been carried out on reducing the conservativeness of the DDS results by constructing Lyapunov–Krasovskii functional (LKF) and choosing appropriate bounding technique in time-derivative of LKF [Citation3,Citation14,Citation15,Citation17,Citation18]. In [Citation9], the usage of Jenson inequality induces some conservativeness to the DDS results. Therefore, the performance of the DDS criterion is improved by using free-weighting matrices techniques, but it also increases the complexity by introducing additional slack variables [Citation4]. In [Citation25], reciprocally convex combination lemma was used to reduce the conservativeness of the results with less number of decision variables. In this paper, DDS criterion is derived by constructing the LKF and the integral term in time derivative of LKF is bounded using reciprocally convex combination lemma and free-weighting matrices and finally expressed in linear matrix inequalities (LMIs). The DDS criterion is solved to determine the DM of the DC position servo system.
Various stability results for TD systems under different delay effects have been reported in [Citation1–13,Citation29–37]. To the best of the authors' knowledge, only a few kinds of literature discuss the effect of TD in stability analysis of DC position servo systems [Citation1,Citation26–28]. This has motivated us to carry out the present research work. This paper investigates the DDS analysis of DC position servo system with constant TD and TVDs. After deriving the DDS criterion and DMs are computed for different values of the control parameters and the relation between control parameters and DM is established. The proposed outcomes are shown on the standard benchmark DC position servo system and reinforced reasonably by the simulation and experimental results. This paper is organized as follows: In Section 2, the DC position servo system with proportional-integral (PI) controller is modelled in the state-space framework with TD. Section 3 presents the DDS criterion for the TD system. Results and discussion are provided in Section 4. The simulation studies are carried out in Section 5. Section 6, discusses the experimental setup of the DC position servo system. Finally, conclusions are drawn in Section 7.
The notations used for DC position servo system are given in Table .
Table 1. Notations.
2. Model of DC position servo system with time-delay
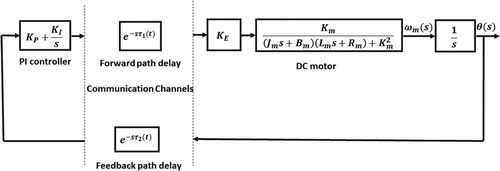
The conventional DC position servo system is modified with TD in the control loop. The PI controller is used in this model. It is assumed that TVD in the forward loop is and feedback loop is
are considered as the single delay component
[Citation2–4,Citation14,Citation15]. Figure shows the block diagram of DC position servo system.
Figure 1. Block diagram of DC position servo system.
The state-space equation of the TD system is given as follows:
(1)
(1)
(2)
(2) where
is the state vector,
and
are the system matrices.
satisfies the following conditions
(3)
(3)
(4)
(4) where
and δ are represent DM and delay derivative, respectively. It is assumed to be
for NCS through a delayed communication channel [Citation2,Citation4,Citation15,Citation22,Citation25,Citation37]. The controller is described as
(5)
(5) The state-space equation of the DC position servo system shown in Figure is given as
(6)
(6) where
is given as
(7)
(7) In the following section, the stability results for DC position servo system is presented.
3. Main result
The DDS criterion for the system (Equation1(1)
(1) ) is stated below:
Theorem 1
For scalars and
, the system (Equation1
(1)
(1) ) is stable if there exist symmetric positive-definite matrices U,
,
, M; and N is a free matrix of appropriate dimensions such that the following LMIs hold true
(8)
(8)
(9)
(9) where
(10)
(10)
(11)
(11)
(12)
(12)
The proof of the Theorem 1 is given in [Citation26]. The reciprocal convex combination lemma is applied to the Theorem 1 to bound the integral term in the time-derivative of the LKF [Citation25].
Remark 1
The use of reciprocal convex combination lemma in the Theorem 1 has reduced the number of decision variables comparable to those based on Jenson's inequality [Citation4]. Since, there is a further scope to reduce the conservativeness of proposed results in Theorem 1, a new DDS criterion will be derived by constructing LKF and choosing appropriate bounding technique. Similar to Theorem 1, the following result are presented using free-weighting matrices and Leibniz-Newton formula [Citation24].
Theorem 2
For scalars and
, the system (Equation1
(1)
(1) ) with
is asymptotically stable if there exist U>0,
,
,M>0,
and
such that
(13)
(13)
(14)
(14) where
(15)
(15)
(16)
(16)
(17)
(17)
(18)
(18)
Proof.
Construct the LKF
(19)
(19)
The time-derivative of is given by
(20)
(20) The integral term in (Equation20
(20)
(20) ) is bounded by the method reported in [Citation24]. Finally, equation (Equation20
(20)
(20) ) can be expressed in quadratic form as follows
(21)
(21) where
(22)
(22) if π is negative definite, then
and, therefore, in the sense of Lyapunov the given system is asymptotically stable. The maximum value of delay for which
will be the DM for the given system. Hence, this completes the proof of the Theorem 2.
Remark 2
When the rate of change of TD is constant, by setting in Theorem 2, the DDS criterion can be used to determine the stability of the system in the presence of constant delay. The usage of free-weighting matrices to bound the integral terms in time-derivative of LKF (20) increases the number of decision variables in Theorem 2.
4. Results and discussion
In this section, DMs are computed for different sets of the PI controller gains by using Theorem 2. The DC position servo system parameters used in this paper are taken from the laboratory motor as follows: ,
,
,
mH,
and
.
The results presented in Tables and are obtained by solving Theorem 2 for different values of and
. Results from Tables and show that DM of the system is quite higher for the constant TD as compared with the TVDs.
Table 2. Delay margin vs  (Theorem 2: ).
(Theorem 2: ).
Table 3. Delay margin vs (Theorem 2: ).
Figure shows the relation between and DM. The values of
are chosen to be
and
. In this graph, the DM increases for an increase in
value from 0.05 to 0.5 then, further increase in
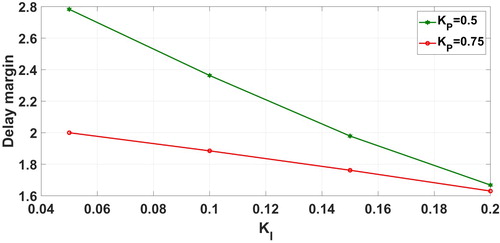
decreases the DM. Figure shows the relation between
and DM. The value of
are chosen to be
and
. This graph shows that DM decreases as
increases. For TVD and constant delay, DM decreases for an increase in
value. These finding can be used to tune the PI controller and maintain system stability in NCSs.
Figure 2. vs Delay margin.
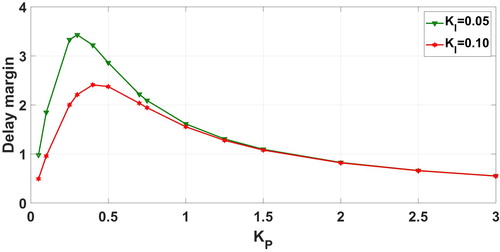
Figure 3. vs Delay margin.
5. Simulation validation of the Obtained results
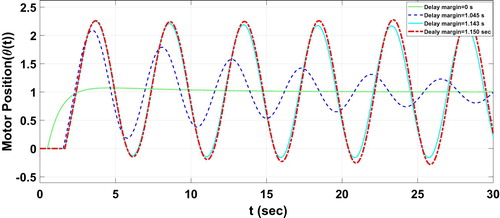
The simulation studies are accomplished using MATLAB to verify the accuracy of the obtained results from Theorem 2. To illustrate the verification, the gain of the PI controller chosen from Table are and
and corresponding DM is
s. This theoretical value of DM implies a marginally stable system at
s. The response of the DC position servo system is plotted for the step input. When
s system is asymptotically stable as shown in Figure . The system response with oscillations as compared to the delay-free system for DM
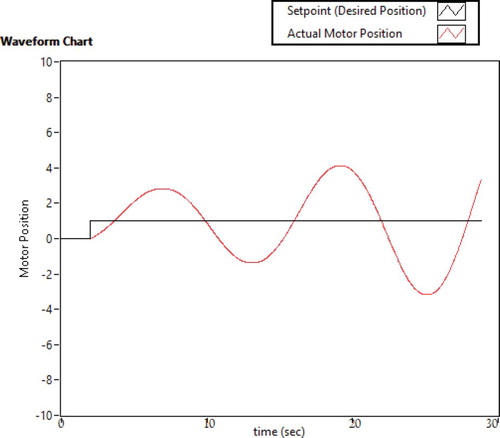
s ensures that system is under stable condition. Further, increase in DM for
s, system becomes marginally stable with sustained oscillations. However, the theoretical results shows that DM for sustained oscillation is 1.045 s. The difference between the theoretical values and simulation values shows the conservativeness of the proposed criterion. The system response results in increasing oscillations at
s hence, the system is under unstable condition.
Figure 4. Evolution of for different DMs (
,
).
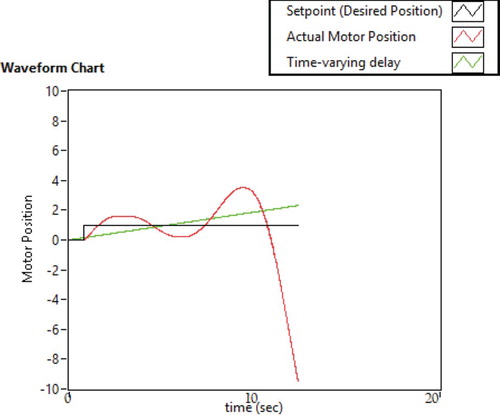
The simulations studies are carried-out on the bench mark DC position servo system having TVD specified with maximum delay bound and delay derivative. The evolution of state variable is monitored in DC position servo system when system is disturbed from the equilibrium position
at t = 0. From Table , the controller parameters employed for simulation study are
and
and their corresponding DM determined through Theorem 2 is 0.999 s. The model of TVD is given by
[Citation38]. In Figure , the TVD is assumed to be sinusoidal varying between
and satisfying
. If the TD is reduced from 0.999 s retaining
, deviation variable
converges to the equilibrium point ensures stable operation as shown in Figure for
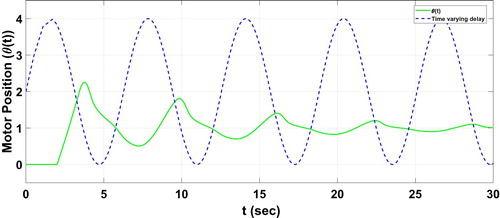
s. On the other hand, increase in the magnitude of TVD
increases the oscillations of the deviation variable
about the equilibrium point as shown in Figure .
Figure 5. Evolution of (
,
,
s).
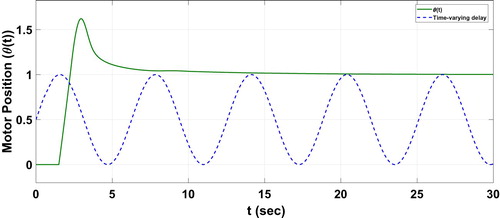
Figure 6. Evolution of (
,
,
s).
6. Experimental setup for DC position servo system
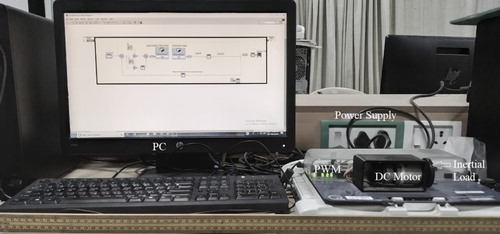
The experimental setup as shown in Figure , which includes the following devices: Computer with LabVIEW software, QNET DC motor hardware, National Instruments (NI) hardware with data acquisition system for transfer motor parameters to the personal computer (PC) and to send appropriate control signal to the DC motor. The data acquisition system provided in NI acquires the speed data from DC motor using tacho-generator and transferred to computer and a proposed controller algorithm developed in Labview generates the appropriate pulse-width-modulated signal to the converter driver.
Figure 7. Experimental setup.
To confirm the effectiveness of the proposed results, the position control of DC motor with TD is done through the experimental setup. Table shows comparison between analytical and experimental results. Two special instances are taken into consideration in which the PI controller parameters are chosen to be and
. In Case A, the stability of DC position servo system is analysed with constant TD. The DM determined from Theorem 2 for the controller parameter
and
is
s. In Case B, the stability of DC position servo system is analysed with TVD. The DM determined from Theorem 2 for the controller parameter
and
is
s.
Table 4. Delay margin obtained via Theorem 2 for .
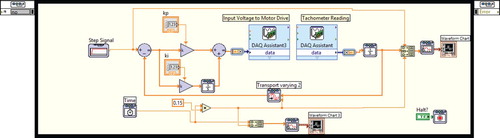
Case A: Constant TD: The control circuit for DC motor is given in Figure . The PI controller is chosen for overall closed-loop operation. The response of DC motor is observed for the step input with different DMs.
Figure 8. Control circuit of DC position servo system with constant TD in Labview.

Figure 9. Control circuit of DC position servo system with TVD in Labview.
The controller task is to maintain the stability of DC position servo system in the presence of the TD in the control loop. The chosen value of controller gain are and
. In Figure , the response of the DC motor is observed for delay-free system. It shows that system response reaches the steady state, which ensures that it is under stable condition. If TD increases from
s, then the system becomes unstable as shown in Figure . Hence the effect of constant TD on stability of the system is experimentally tested.
Figure 10. Evolution of for stable system.
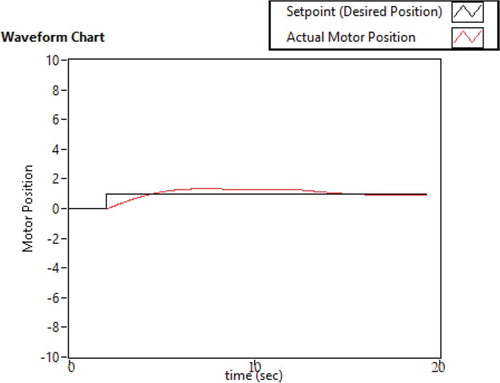
Figure 11. Evolution of for unstable system
Case B: The control circuit for position control of DC motor with TVD is shown in Figure .
Figure shows that system becomes unstable for increase in DM for
and
. Hence, the simulation and experimental result clearly bringing out the effect of TD and TVD on stability and performance of the DC position servo system.
Figure 12. Evolution of for unstable system (
).
Remark 3
The difference between the DMs of analytical and experimental value shows the conservativeness of the proposed DDS criterion and numerical approximations considered during the analysis.
7. Conclusion
In this paper, the DDS of network-controlled DC position servo system with the TD and TVD has been investigated. The chosen LKF and appropriate bounding methods for integral terms on the time-derivative of LKF decide the conservativeness of the proposed criterion. The usage of free-weighting matrices approach increases the estimation of DM. The stability of network-controlled DC position servo system is maintained by choosing the controller gains with concern to the TD. The results shows that gain of PI controller has influence on the DMs of the closed-loop system. For a fixed value, DM increases at first and then decreases, with the increase in
value. For fixed
value, DM decreases for increases in
value. A small reduction in controller gains have significant improvement in the DM. The DM decreases for increases in rate of change of TVD. Since there is a difference in the DM between theoretical and experimental results, it shows that there is a further scope to construct an LKF and choose an appropriate bounding technique. Thus, the proposed method provides set of tuning to the controller for NCS.
Acknowledgments
The authors wish to thank the Editor and the reviewers for their constructive comments and suggestions. This work is supported by Department of Atomic Energy, Government of India under grant No. 02011/6/2019 NBHM(R.P)/R&D II/1615.
Disclosure statement
No potential conflict of interest was reported by the authors.
Additional information
Funding
References
- Ayasun S. Stability analysis of time-delayed DC motor speed control system. Turk J Electr Eng Comput Sci. 2013;21:381–393.
- Jiang L, Yao W, Wu et al. QH. Delay-dependent stability for load frequency control with constant and time-varying delays. IEEE Trans Power Syst. 2012;27(2):932–941.
- Manikandan S, Kokil P. Delay-dependent stability analysis of network-based load frequency control of one and two area power system with time-varying delays. Fluct Noise Lett. 2019; 1950007,18:1–19.
- Liu Y, Li M. An improved delay-dependent stability criterion of networked control systems. J Franklin Inst. 2014;351(3):1540–1552.
- Ayasun S, Gelen A. Stability analysis of a generator excitation control system with time delays. Electr Eng. 2009;91(6):347–355.
- Li X. Control for formation of multi-agent systems with time-varying delays and uncertainties based on LMI. Automatika. 2016;57(2):441–451.
- Saito E, Katsura S. Compensation of integrated resonant and time delay system by using wave compensator. Automatika. 2013;54(1):28–38.
- Xi X, Zhao JF. Fault diagnosis and fault-tolerance control for system with fast time-varying delay. Automatika. 2019;60(4):462–479.
- Ko, Jeong, Poogyeon. Reciprocally convex approach for the stability of networked control systems. Lecture Notes Electr Eng. 2012;10. doi:10.1007/978-1-4614-1.
- Turksoy O, Ayasun S, Hames et al Y. Gain-phase margins-based delay-dependent stability analysis of pitch control system of large wind turbines. Trans Inst Meas Control. 2019;41(13):3626–3636.
- Khalil A, Peng A. A new method for computing the delay margin for the stability of load frequency control systems. Energies. 2018;11(12):1–18.
- Liu P, Huang Z, Liu Y, et al. Delay-dependent stability analysis for load frequency control systems with two delay components. 2018 Chinese Control And Decision Conference (CCDC); 2018; Shenyang. p. 6476–6481.
- Jin L, Zhang C, He Y, et al. Delay-dependent stability analysis of multi-Area load frequency control with enhanced accuracy and computation efficiency. IEEE Trans Power Syst. Sept. 2019;34(5):3687–3696.
- Ramakrishnan K, Ray G. Stability criteria for nonlinearly perturbed load frequency systems with time-delay. IEEE J Emer Sel Top Circ Syst. 2015;5(3):383–392.
- Ramakrishnan K, Pragatheeswaren JK, Ray G. Robust stability of networked load frequency control systems with time-varying delays. Electr Power Compon Syst. 2017;45(3):302–314.
- Sonmez S, Ayasun S, Nwankpa CO. An exact method for computing delay margin for the stability of load frequency control systems with constant communication delays. IEEE Trans Power Syst. 2016;31(1):370–377.
- Zhang CK, Jiang L, et al. QHWu. Delay-dependent robust load frequency control for time delay power systems. IEEE Trans Power Syst. 2013;28(3):2192–2201.
- Yu X, Tomsovic K. Application of linear matrix inequalities for load frequency control with communication delays. IEEE Trans Power Syst. 2004;19(3):1508–1515.
- Ayasun S. Computation of time-delay margin for DC motor speed control system with time-delays. Int Rev Autom Contr. 2010;3:485–491.
- Gu K, Niculescu SI. A survey on recent results in the stability and control of time-delay systems. ASME J Dyn Syst Meas Contr 2003;125:158–165.
- Ramakrishnan K, Ray G. An improved delay-dependent stability criterion for a class of lurie systems of neutral type. J Dyn Syst Meas Contr. 2012;134:011008-1–011008-6.
- Ramakrishnan K, Ray G. Stability criterion for network control systems with additive time- varying state-delays and bounded nonlinearity. Int J Syst Contr Commun. 2016;7(1):68–82.
- Dey R, Ghosh S, Ray G, et al. Hα load frequency control of interconnected power systems with communication delays. Electr Power Energy Syst. 2012;42:672–684.
- Shao H, Han QL. Less conservative delay-dependent stability criteria for linear systems with interval time-varying delays. Int J Syst. 2011;43(5):894–902.
- Park PG, Ko JW, Jeong C. Reciprocally convex approach to stability of systems with time-varying delay. Automatica. 2011;47(1):235–238.
- Manikandan S, Kokil P. Stability analysis of network controlled DC position servo system with constant and time-varying delays. 2019 IEEE 1st International Conference on Energy, Systems and Information Processing (ICESIP); 2019; Chennai. pp. 1–5.
- Talar S, Dariusz H, Wojciech G. Stability region of a simplified multirotor motor-rotor model with time delay and fractional-order PD controller. Automatika. 2017;58(4):384–390.
- Dubey GK. Fundamentals of electrical drives. New Delhi: Narosa Publishing House; 1995.
- Zhang CK, Jiang L, Wu QH, et al. Further results on delay-dependent stability of multi-area load frequency control. IEEE Trans Power Syst. 2013;28(4):4465–4474.
- Jiang X, Han QL. Hα control for the linear system with interval time-varying delay. Automatica. 2005;41(12):2099–2106.
- Motion control systems with network delay. Automatika. 2010;51(2):119–126.
- Yang F, He J, Wang J, et al. Auxiliary-function-based double integral inequality approach to stability analysis of load frequency control systems with interval time-varying delay. IET Control Theory Appl. 2017;12(5):601–612.
- Khoroshun AS. Stability and speed control of a series-Wound DC motor. Int Appl Mech. 2017;52:432–436.
- Shen L, Xiao H. Delay-dependent robust stability analysis of power systems with PID controller. Chin J Electr Eng. 2019;5(2):79–86.
- Naveed A, SÖnmez Ş, Ayasun S. Stability regions in the parameter space of PI controller for LFC system with EVs aggregator and incommensurate time delays. 2019 1st Global Power, Energy and Communication Conference (GPECOM); 2019; Nevsehir, Turkey. p. 461–466.
- Jin L, Zhang C, He Y, et al. Delay-Dependent stability analysis of multi-Area load frequency control with enhanced accuracy and computation efficiency. IEEE Trans Power Syst. 2019;34(5):3687–3696.
- Vijeswaran D, Ramakrishnan K, et al. Stability analysis of network controlled Micro-Grid systems with communication delays and nonlinear perturbations. 2019 IEEE 1st International Conference on Energy, Systems and Information Processing (ICESIP); 2019; Chennai. p. 1–6.
- Yang F, He J, et al. Auxiliary-function-based double integral inequality approach to stability analysis of load frequency control systems with interval time-varying delay. IET Control Theory Appl. 2018;12(5):601–612.