
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
A physics-based model for the prediction of wildfire propagation, which combines the cellular automata concept with virtual Lagrangian fire particles, is further developed to include fire extinction actions. Deposition of water and firebreaks are included in the formulation. The fire propagation model is then coupled with a Monte Carlo Tree Search (MCTS) algorithm to optimize the allocation of fire extinction actions. Starting from an ignited fire, and fixing the amount of resources available for firefighting, the model suggests which series of actions minimizes the loss of wildland. The model has been assessed and validated with model fires and then applied to a realistic scenario. MCTS optimization is found to autonomously outperform human intuition for medium-scale fires and to successfully enhance human decision-making capabilities for large-scale fires with the use of convolution-based terrain re-sampling. This study opens up new possibilities for the development of decision-making tools to assist the real-time allocation of firefighting resources as well as to support the design of preventive measures to preserve the environment and reduce the potential impact of wildfires.
Introduction
Wildfires are natural phenomena of immense proportions. So-called mega-fires threaten the property and lives of many people, impact the global climate by releasing vast amounts of carbon dioxide emissions and create individual weather systems (DellaSala et al. Citation2022; Penney, Habibi, and Cattani Citation2019). The frequency of wildfires has been increasing in recent years (Xu et al. Citation2020), demanding huge investments and use of resources for firefighting and protection of both rural and urban areas. In most cases, firefighting efforts are based on subjective decisions made with insufficient information by individual fire brigade commanders (Griffith et al. Citation2017), which often lead to waste or ineffective use of available resources. The optimal use of firefighting resources needs to consider a wide range of factors, which could change in both space and time. These include local wind and weather conditions, as well as the topology of the terrain and fuel available (e.g., type and density of vegetation and buildings). Practices developed over the years could fail in case of exceptional weather conditions (Mastorakos et al. Citation2023) or without effective means to monitor the first development of the fire. Therefore, there is an urgent need to develop tools for resource allocation for successful wildfire suppression. With the progress in modeling and simulation of fire propagation, e.g. Wahlqvist et al. (Citation2021), Cheng et al. (Citation2022), Haghani et al. (Citation2022), computational methods are becoming increasingly important to assist the design of firefighting systems and decision-making processes. The development of firefighting-assistance computational tools requires at least three modeling steps: a fast and accurate model for fire ignition and propagation; models of fire suppression strategies; and an optimization algorithm for the selection of the optimal use of firefighting resources. As far as the modeling of fire propagation is concerned, this work will take advantage of a model recently proposed by Mastorakos et al. (Citation2023), which is based on the combination of a cellular automata framework, e.g., Karafyllidis and Thanailakis (Citation1997), Berjak and Hearne (Citation2002), Alexandridis et al. (Citation2008), and stochastic virtual fire particles.
Fire suppression is an intricate problem that must consider many different factors and requirements, including avoiding propagation at the urban-wildland interface and preservation of biodiversity (DellaSala et al. Citation2022). Sometimes, active fire management has detrimental effects on forest development (DellaSala et al. Citation2022), with related impact on sustainability of prevention actions. In general, it is not possible to make wildland areas intrinsically safe since there will always be vegetation and other ignitable materials that could generate a self-sustained fire. Therefore, a reliable plan for firefighting actions must always be put in place. Ten possible suppression strategies are aggregated from the literature (National Wildfire Coordinating Group Citation1996) and summarized in . The two most common strategies for wildfire fighting are direct aerial water attack and firebreaks (Ingalsbee and Raja Citation2015), the latter also commonly used as prevention strategy. Therefore, the focus of this work will be on these two strategies to set up and demonstrate a framework for decision-making support. Extension to other firefighting strategies is left for future work. Water is a very common substance used in direct aerial attack as it is inexpensive and widely available. In National Wildfire Coordinating Group (Citation1996), different delivery techniques and the corresponding variable parameters of water extinction (e.g., amount, form, and place) are discussed in depth. Spray patterns (sometimes also: “fog patterns”) are in general very effective due to their high surface area, which enhances vaporization and therefore leads to a larger decrease in temperature of the flaming area (Grant, Brenton, and Drysdale Citation2000). However, direct deposition of liquid water on the burning surface is also often used. Attempts to model firefighting tactics can be found in the literature, e.g., Alexandridis et al. (Citation2011), Russo et al. (Citation2016). While all these models aim at including the main physics of the various firefighting actions, their implementation characteristics generally depend on the specific modeling framework that is used to predict fire propagation.
Table 1. Summary of the most typical wildfire suppression strategies (National Wildfire Coordinating Group Citation1996).
The problem of optimal resource allocation in the context of wildfire suppression is commonly approached in the literature by modeling it as a Markov Decision Process (MDP). In this framework, the chain of decisions is expressed with both probabilistic and deterministic elements (Bertsimas et al. Citation2017; Griffith et al. Citation2017). Two key elements must be considered for the evaluation of fire suppression MDP approaches: firstly, choice of scope, and secondly, choice of method. Some studies extend the scope beyond reactive fire suppression and also include preemptive fuel management, such as effective forestry or intelligent infrastructure planning (Minas, Hearne, and Martell Citation2014). The idea of accounting for firefighting costs in addition to maximizing the remaining land value has also been explored, which enables pareto-optimal solutions where no dimension can be further optimized without tarnishing another (Zhou and Erdogan Citation2019). When optimization strategies are selected, a trade-off between complexity and completeness has to be made. Refining the model does increase computational expenses and reduces ease of operability. In this work, the Monte Carlo Tree Search (MCTS) method is used for optimization. This method, commonly employed in game theory, allows for a very generic approach to the optimal resource allocation problem and has been identified as an extremely novel but promising approach for dynamic resource allocation for wildfire suppression (Bertsimas et al. Citation2017; Griffith et al. Citation2017). MCTS has been deployed in the past to tackle problems that contain a probabilistic element (Eyerich, Keller, and Helmert Citation2010) and also problems that exhibit large action spaces (Couëtoux et al. Citation2011). Large action space hereby refers to a large number of possible “moves” from any given node, which is commonly encountered in continuous settings (e.g., positioning of an extinction action during wildfire suppression).
The main aim of this work is to further develop the model proposed by Mastorakos et al. (Citation2023) to allow for optimal allocation of a limited number of extinction actions. More in detail, the objectives are to (i) develop a simple model for aerial attack and firebreaks as extinction actions to be used in the selected fire propagation model; (ii) couple the fire propagation model with an optimization algorithm based on MCTS to suggest the area of application and sequence of the selected limited extinction actions and maximize the protection of the environment and urban areas; (iii) assess the model against model fires and a realistic scenario. The paper is organized as follows. First, the methods are introduced with details on the optimization procedure. Results are then presented and discussed to show the capabilities and limits of the current implementation. Concluding remarks close the paper.
Methods
Fire propagation
The underlying model for the prediction of fire propagation, which is used by the optimization algorithm, is based on a recent model developed by Mastorakos et al. (Citation2023). From a conceptual point of view, the model could be described as a combination of the cellular automata approach and a Lagrangian tracking of virtual fire particles, which transport the information of fire propagation (Efstathiou et al. Citation2023; Mastorakos et al. Citation2023). The model was inspired by an established model for the prediction of ignition probability in engines (de Oliveira et al. Citation2021; Neophytou, Richardson, and Mastorakos Citation2012). In this novel approach, the area of interest is modeled with a two-dimensional grid, with each cell representing a portion of the terrain and/or buildings characterized by an assigned composition in terms of fuel and thermal properties. After an ignition source is established, multiple Lagrangian fire particles are injected from burning cells. In this context, each fire particle represents a different mode of propagation (e.g., convection of hot combustion products by the wind, transport of embers, and radiation). The movement of particles, which contains elements of stochasticity, e.g. related to the turbulent boundary layer (Efstathiou et al. Citation2023), will determine the fire propagation. The model used in this work is a revised version of the model discussed in Mastorakos et al. (Citation2023). In this revised version, equations for the conservation of energy and mass are applied to both the terrain cells and the Lagrangian fire particles representing the mode of propagation by wind convection. The conservation of energy enables the implementation of fire chemistry in the moving particles, heat exchange with the land, and release of fuel from the land through volatilization (Sullivan Citation2017). Each cell of the terrain is modeled as a solid with a given amount of fuel and given thermal properties. The terrain exchanges energy with active fire particles (e.g., through convection), leading to an increase in temperature of the terrain cell. The volatilization of the fuel (e.g., cellulose), modeled with an Arrhenius-type equation (Sullivan Citation2017), leads to the release of fuel into the atmosphere. The generation of gaseous fuel determines the release of a fire particle representing convection of hot gases. Oxidation process is included in the evolution of the fire particle, whose temperature increases due to exothermic reactions. Air entrainment in the fire particles and cooling of the terrain by the cold air are also included in the formulation. In the simulations shown in this work, only the mode of propagation related to the convection of hot gases is considered, whereas Lagrangian fire particles representing radiation and transport of embers are not included.
Extinction actions
Firebreaks (i.e., the extinction action of preemptively removing all fuel from the terrain by scrapping it down to mineral soil) are commonly created by ground forces utilizing chainsaws, other mechanical tools, or explosives (National Wildfire Coordinating Group Citation1996). We model this action by simply setting the mass of fuel to zero for the cells of the terrain where the action is applied. Direct aerial water attack is modeled here using an instantaneous vaporization assumption, which implies that all the water evaporates in the timestep when the water is deposited on the terrain. It is also assumed that the energy required to vaporize the water comes from the solid material on the land, which for the sake of simplicity will be referred to as “fuel”, although it could also contain a percentage of non-burning material. Therefore, the aerial attack action results in a decrease in the temperature of the fuel, which, if the decrease in temperature is sufficiently high, will eventually inhibit the release of volatile. Under these assumptions, the change in temperature of the solid fuel can be expressed as , where
is the latent heat of evaporation of water (note that only the contribution from the latent heat is considered, whereas the change in sensible enthalpy is not included),
is the mass of water deposited by the aerial attack,
is the mass of fuel, and
is the fuel specific heat.
It is important to note that the time required to fully vaporize the water depends on many factors, e.g. the temperature of the terrain and the amount of water deposited per unit area. Preliminary estimations based on heat transfer between a layer of water film and the solid fuel underneath (assumed to be at high temperature, i.e. in the vicinity of the fire front) have shown that the evaporation time of water could be of the order of a few seconds. Since the timestep used in the simulations is relatively large (1 s) and the total simulated time is often at least two orders of magnitude higher, the modeling of vaporization as an instantaneous process seems reasonable. Therefore, it is sufficient to model the heat exchange from the solid fuel to the water film and the consequent drop in temperature of the fuel over the course of a single simulation timestep only. Further assessment and improvements should be done in the future, also considering heat transfer between the water and the flame.
It is important to point out that preliminary evaluations performed on model fires using the fire propagation model used in this work have shown that the critical width of firebreaks needed for successful fire containment is of the same order of magnitude as stated in the literature (National Wildfire Coordinating Group Citation1996). However, the critical amount of water needed during a direct aerial attack is underestimated by the model. The likely reason for this behavior is identified to be related to aerial descend vaporization due to convective and radiative heat transfer from the flames, which is not currently accounted for in our modeling framework, in addition to uncertainties in the characterization of the terrain and related fuel. These should be carefully addressed in future studies.
Search algorithm
The key novelty of this paper lies in combining Monte Carlo Tree Search (MCTS) with the fire propagation model discussed above. To quantify the success of a suppression effort, a metric terrain utility function, , is introduced. The utility function is computed as the sum of all destroyed cell utilities,
, and is defined in EquationEquation 1
(1)
(1) . The utility of a cell,
, represents the value of the associated plot of land (the higher the utility, the higher the value). The utility function, as defined here, represents the loss of utility and by definition it cannot be positive:
where the sum is performed over all the destroyed cells at a given time .
In the context of wildfire propagation, MCTS is used as follows. Each stage represents an extinction action, which is specified by spatial position and shape, time of application (each action is performed in one particular simulation timestep), and type (firebreak or direct aerial water attack). Using one timestep only for each action remains justified as long as the individual actions are kept small in size. This is chosen to keep the model complexity to a minimum. Note that keeping the action size small can be easily achieved, e.g. by splitting up a long fireline into multiple small unit actions. Additionally, it is chosen to optimize only in space, not in time. Future work should focus also on time optimization as well as on the implementation of extinction actions that last over a time period.
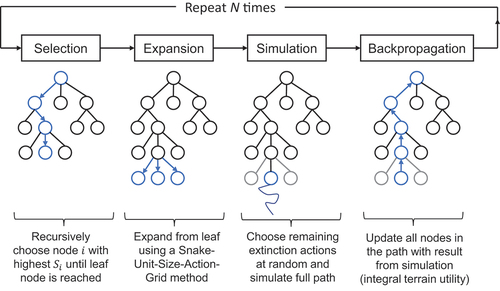
An iteration of MCTS consists in four main steps, as schematically shown in : selection, expansion, simulation, and backpropagation. Each stage of the tree describes one extinction action with a fixed time of application, but varying position. Each node describes one extinction action with a fixed time of application and a fixed position. The goal of the Monte Carlo Tree Search process is to find the path (i.e., the sequence of extinction actions) that preserves the most terrain utility.
Figure 1. Monte Carlo Tree Search algorithm (e.g., see Chaslot et al. Citation2021) adapted for wildfire suppression.
In the context of wildfire propagation, two new definitions are introduced: firstly, the integral utility, , which is the integral of the utility function,
, over the whole duration of a simulation involving a node
,
secondly, the theoretical minimum of the integral utility, , i.e. the value of
if all cells were to be destroyed immediately at the point of ignition
.
is defined as:
where is a constant equal to the utility function if all cells in the terrain are destroyed.
Using both definitions, the MCTS selection function is defined as:
The sum of the node integral utilities, , normalized by the absolute value of the theoretical minimum of the integral utility,
, quantifies the quality of a path, whereas the number of stage simulations,
, and the number of node simulations,
, quantify the novelty of a path. By pre-testing and inspection of algorithm results, we found a constant weighting factor
necessary to balance the effects of exploitation term (quality) and exploration term (novelty).
Choosing to use the integral utility (and not, e.g., the final remaining terrain utility
) is an important MCTS performance improvement. The normalization of
with
is performed to eliminate the dependence of the exploitation term on absolute terrain size and absolute cell utility values. The absolute value of the so created exploitation term,
, then represents the fraction of the integral utility that has been destroyed, averaged over all simulations that involve node
. Note that a value of the exploitation term equal to
expresses that in every epoch involving node
, the whole terrain was immediately and fully destroyed at the start of the simulation (
). In general, we have:
EquationEquation 5(5)
(5) holds because the exploitation term is normalized using
. As the initial value of the terrain utility function is defined as 0, both
and
are lower than 0, and also by definition
. The higher the value of the exploitation term (i.e., much closer to 0), the lower the loss of utility.
In the algorithm implemented in the present work, the expansion step of MCTS was performed using a Snake-Unit-Size-Action-Grid method, which selects a traceable, discrete set of terrain positions as possible nodes. More specifically, this method consists of a set of rules that aim to reduce computational complexity by only testing promising strategies: extinction actions must be rectangular, non-overlapping, and vertically/horizontally oriented. In addition, they must form a connected chain with the actions of the same type that have already been applied. For large-scale fire modeling, preprocessing is required to keep MCTS runtime within acceptable bounds. To handle large terrain resolutions of more than a few hundred cells, critical area cutting and image compression using bicubic interpolation are applied.
To summarize, multiple extinction actions with pre-specified time of application are optimized spatially using Monte Carlo Tree Search. At each epoch of the search algorithm, a full sequence of all available extinction actions is investigated during the third step of the MCTS (simulation) by utilizing the fire propagation model, which enables the evaluation of the utility function to be given back to the next step (backpropagation) of the MCTS algorithm. Multiple evaluations of the fire propagation are therefore performed, which makes it essential to develop a fast model to predict the evolution of fires.
Results and discussion
Model fires
The performance of the method is first assessed by simulating a number of model fires. An example is shown in . An area of high-utility (a treasure – e.g., a building or a deposit of fuel) is placed in a central position along the southern boundary of the area of interest. This high-utility area is highlighted in black in . A double fire front (from both east and west boundaries) moves toward the high-utility area. The resources for firefighting are limited to three actions, all applied at the same time (i.e., three units of fire brigades are working simultaneously). The algorithm finds a solution with a normalized integral utility of . The high-utility area is protected successfully. Snapshots from the fire propagation simulation, with corresponding utility maps and time evolution of the utility function, are shown in Figure A1 of the Supplementary Material. A Monte Carlo tree excerpt is given in Figure A2.
Figure 2. Terrain schematic with the three firebreak extinction actions for the model fire simulation. The action (green) corresponds to the first stage, the
action (yellow) corresponds to the second stage, and the
action (gray) corresponds to the third stage in the underlying Monte Carlo tree (see Supplementary Material, Figure A2). The treasure is displayed in black.
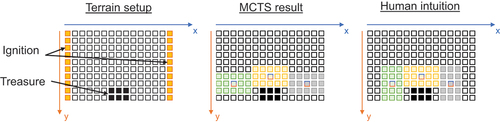
The results produced by the algorithm suggest that the present methodology outperforms human intuition, which would suggest to fully seal the treasure with a sequence of a vertical, horizontal, and another vertical action. Both the actual algorithm outcome and the extinction action sequence that would be produced by human intuition are displayed in . This outcome is the result of the combination of the MCTS optimization algorithm with a model for the prediction of fire propagation. Since the fire model predicts that a narrow 1-cell grass passage does not provide a sufficient amount of fuel for a self-sustained fire, the optimization algorithm actually manages to find a solution which saves more utility than human intuition. It is clear that to provide a reliable support for decision-making, it is of paramount importance to have a robust and validated model for fire propagation (Efstathiou et al. Citation2023).
As far as the computational time is concerned, using an Intel (R) Core (TM) i7–4770 CPU @ 3.40 GHz machine for epochs yielded an average runtime of
, which is considered to be computationally expensive. To make the simulation of very large-scale terrains accessible, the speed of the algorithm should be further improved, e.g., by taking advantage of parallel computing.
Real fire scenario
The analysis of the performance of the model in a realistic fire scenario is performed by analyzing the Mati fire (Greece, 2018). This case was already investigated by Mastorakos et al. (Citation2023). The revised version of the fire propagation algorithm is applied in this study. A critical region to be protected is selected (see red frame in , left). This area is analyzed with MCTS optimization to find the optimal distribution of four firebreaks to maximize the preservation of the area. The terrain spans a much larger area than the small-scale model fire presented above. The critical region measures and is chosen because it is the region where the fire reaches the outskirts of the town (as shown in ). To increase the challenge for the algorithm, not all four extinction actions are placed at the same time, but rather at
s,
s,
s, and
s. This reflects real-time resource limitations and removes the trivial solution of cutting off the complete fire front at the start. Note that the set of actions and the related timing imposed in this simulation have been selected mainly for the purpose of testing of the algorithm. In general, the characteristics of extinction actions (e.g., size and timing) depend on many factors and have to be specified as user input prior to running the simulation on the basis of the available firefighting resources.
Figure 3. Selected area of investigation for the real fire scenario (left) and terrain schematic with the four firebreak extinction actions obtained from MCTS (right). The action (green) corresponds to the first stage, the
action (yellow) corresponds to the second stage, the
action (gray) corresponds to the third stage, and the
action (dark gray) corresponds to the fourth stage in the underlying Monte Carlo tree (see Figure A3 in the Supplementary Material). The red star on the left map indicates the ignition location of the fire in the real scenario (Mastorakos et al. Citation2023). The fire in the area of interest is modeled as a fire front approaching the domain from west to east.
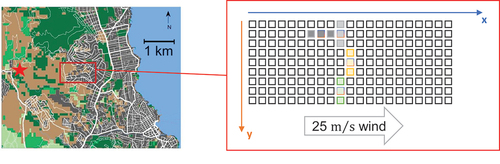
The four firebreaks have dimensions , which corresponds to a unit size
cells. The algorithm performs MCTS with
epochs. The fire is started via left-line ignition (west). The domain used in the simulations (see and ) exhibits notably coarse resolution with cell dimensions
. Due to algorithmic scaling-up issues, a convolution mask for the terrain and a corresponding reduction factor for wind speed are applied (and reversed prior to plotting), and fire particles are assumed to die if they pass a firebreak (of 50 m width).
Table 2. Space and time model parameters for the real fire scenario: is the total simulated time,
is the simulation timestep,
and
indicate the grid size in the
and
directions,
and
are the number of cells in the
and
directions, respectively.
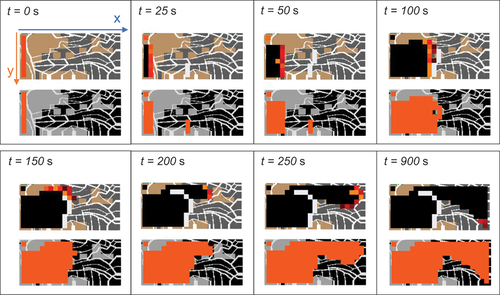
Terrain conformation, including building and road location, is reconstructed from Google Maps. Information about the type of vegetation is taken from the Copernicus database. This is given as an input to the model. Snapshots of the fire propagation simulation at different time instants are displayed in . The utility maps show buildings (cell utility equal to 100) in black, cropland (utility equal to 3) in gray and roads (utility equal to 1) in white. The terrain maps depict the sequence of firebreaks according to their specified times of application. An excerpt of the first two stages of the underlying Monte Carlo tree is shown in Figure A3 of the Supplementary Material. Interestingly, in only the south-eastern quarter of the critical region is saved. The first extinction actions (applied at s and
s) are placed at
m even though the third extinction action at
s is placed too late to reliably contain the fire. At
s, zero fire particles remain in the area of interest (i.e., the fire cannot propagate any further in the investigated area) and the normalized integral utility is
. Note that the fire propagation model is characterised by elements of stochasticity. Therefore, different simulations with the same configuration of firebreaks may result in different evolutions of the fire and different values of the integral utility (in some cases the first three firebreaks may also be able to contain the fire). The final optimization outcome for extinction action placement is shown in , right. This outcome may look questionable, because an operator would know that the town stretches beyond the critical area analyzed by the algorithm and it may therefore be preferable to contain the fire fully, even if most of the area has to be sacrificed to achieve that. Keeping in mind that the algorithm only analyzes the terrain extract given as input, and also that it uses the integral utility as a metric (which rewards savings higher if they are made earlier on during the firefighting process), the outcome is very much in agreement with the implementation and does provide useful fire suppression insights. This example is also useful to remark that the entire area to protect must be included in the domain for a comprehensive evaluation operated by the optimization algorithm. It is clear that the limited amount of possible extinction actions made it possible to save only part of the area of high-utility. More actions are necessary to save a larger area. However, this case provides a good example of the capability of the model to find an optimal use of a limited number of firefighting resources. Note that ethics in the decision-making process must always be considered and should always be put at the forefront of any decision suggested by any algorithm.
Figure 4. Simulation result at different time instants for the real fire scenario. For each time, the top plot shows the advancement of the fire front (burnt area is indicated by black color); the bottom plot shows the utility map with orange color used to indicate the destroyed cells.
Concluding remarks
A model for the prediction of fire propagation based on the combination of cellular automata approach and Lagrangian fire particles has been coupled with Monte Carlo Tree Search (MCTS) to optimize the allocation of a limited number of firefighting actions. The resulting framework has the potential to assist both the preventive design of the landscape and real-time management of existing fires. Two extinction actions have been implemented into the fire propagation model, namely firebreaks and direct aerial water attack. The algorithm is found to outperform human intuition for small-scale fires and augment human decision-making for large-scale terrains. This is achieved by leveraging an MCTS methodology in combination with utility map inputs to suggest a spatially optimized sequence of extinction actions. For large-scale terrains, it is concluded that the current MCTS algorithm can also enhance the quality of human decision-making, if convolution-based terrain resampling is applied to keep runtime tractable.
Author contributions
Conceptualization: JEP, AG; Methodology: JEP (MCTS and fire extinction actions), SK, AG, SG, EM (fire propagation model); Formal analysis and investigation: JEP; Writing – original draft preparation: JEP, AG; Writing – review and editing: JEP, SK, SG, EM, AG; Supervision: AG.
Supplemental Material
Download PDF (644.6 KB)Disclosure statement
No potential conflict of interest was reported by the author(s).
Supplementary material
Supplemental data for this article can be accessed online at https://doi.org/10.1080/00102202.2023.2246195
References
- Alexandridis, A., L. Russo, D. Vakalis, G. V. Bafas, and C. I. Siettos. 2011. Wildland fire spread modelling using cellular automata: Evolution in large-scale spatially heterogeneous environments under fire suppression tactics. Int. J. Wildland Fire 20 (5):633–47. doi:10.1071/WF09119.
- Alexandridis, A., D. Vakalis, C. Siettos, and G. Bafas. 2008. A cellular automata model for forest fire spread prediction: The case of the wildfire that swept through Spetses island in 1990. Appl. Math. Comput. 204 (1):191–201. doi:10.1016/j.amc.2008.06.046.
- Berjak, S. G., and J. W. Hearne. 2002. An improved cellular automaton model for simulating fire in a spatially heterogeneous savanna system. Ecol. Modell 148 (2):133–51. doi:10.1016/S0304-3800(01)00423-9.
- Bertsimas, D., J. D. Griffith, V. Gupta, M. J. Kochenderfer, and V. V. Mišić. 2017. A comparison of monte carlo tree search and rolling horizon optimization for large-scale dynamic resource allocation problems. Eur. J. Oper. Res. 263 (2):664–78. doi:10.1016/j.ejor.2017.05.032.
- Chaslot, G., S. Bakkes, I. Szita, and P. Spronck. 2021. Monte-Carlo Tree Search: A new framework for game AI. Proceedings of the AAAI Conference on Artificial Intelligence and Interactive Digital Entertainment 4 (1):216–217. doi:10.1609/aiide.v4i1.18700.
- Cheng, S., I. C. Prentice, Y. Huang, Y. Jin, Y.-K. Guo, and R. Arcucci. 2022. Data-driven surrogate model with latent data assimilation: Application to wildfire forecasting. J. Comput. Phys. 464:111302. doi:10.1016/j.jcp.2022.111302.
- Couëtoux, A., J.-B. Hoock, N. Sokolovska, O. Teytaud, and N. Bonnard. 2011. Continuous Upper Confidence Trees. In Learning and Intelligent Optimization. LION 2011. Lecture Notes in Computer Science, ed. C. A. C. Coello, Vol. 6683. Berlin, Heidelberg: Springer. doi:10.1007/978-3-642-25566-3_32.
- DellaSala, D. A., B. C. Baker, C. T. Hanson, L. Ruediger, and W. Baker. 2022. Have western USA fire suppression and megafire active management approaches become a contemporary Sisyphus? Biol. Conserv. 268:109499. doi:10.1016/j.biocon.2022.109499.
- de Oliveira, P. M., M. P. Sitte, M. Zedda, A. Giusti, and E. Mastorakos. 2021. Low-order modeling of high-altitude relight of jet engine combustors. Int. J. Spray Combust. Dyn. 13 (1–2):20–34. doi:10.1177/17568277211021322.
- Efstathiou, G., S. Gkantonas, A. Giusti, E. Mastorakos, C. M. Foale, and R. R. Foale. 2023. Simulation of the December 2021 Marshall fire with a hybrid stochastic Lagrangian-cellular automata model. Fire Saf. J. 138:103795. doi:10.1016/j.firesaf.2023.103795.
- Eyerich, P., T. Keller, and M. Helmert. 2010. High-quality policies for the Canadian traveler’s problem. Proceedings of the AAAI Conference on Artificial Intelligence 24 (1):51–58. doi:10.1609/aaai.v24i1.7542 .
- Grant, G., J. Brenton, and D. Drysdale. 2000. Fire suppression by water sprays. Prog. Energ. Combust. 26 (2):79–130. doi:10.1016/S0360-1285(99)00012-X.
- Griffith, J. D., M. J. Kochenderfer, R. J. Moss, V. V. Mišić, V. Gupta, and D. Bertsimas. 2017. Automated dynamic resource allocation for wildfire suppression. Lincoln Lab J. 22 (2): 38–59.
- Haghani, M., E. Kuligowski, A. Rajabifard, and C. A. Kolden. 2022. The state of wildfire and bushfire science: Temporal trends, research divisions and knowledge gaps. Saf. Sci. 153:105797. doi:10.1016/j.ssci.2022.105797.
- Ingalsbee, T., and U. Raja. 2015. The rising costs of wildfire suppression and the case for ecological fire use. ‘The Ecol. Importance Of Mixed-Severity Fire’, Chapter. 12:348–71.
- Karafyllidis, I., and A. Thanailakis. 1997. A model for predicting forest fire spreading using cellular automata. Ecol Modell 99 (1):87–97. doi:10.1016/S0304-3800(96)01942-4.
- Mastorakos, E., S. Gkantonas, G. Efstathiou, and A. Giusti. 2023. A hybrid stochastic Lagrangian - cellular automata framework for modelling fire propagation in inhomogeneous terrains. Proc. Combust. Inst. 39 (3):3853–3862. doi:10.1016/j.proci.2022.07.240.
- Minas J. P., J. W. Hearne, and D. L. Martell. 2014. A spatial optimisation model for multi-period landscape level fuel management to mitigate wildfire impacts. Eur. J. Oper. Res. 232(2):412–422. doi:10.1016/j.ejor.2013.07.026.
- National Wildfire Coordinating Group. 1996. Wildland Fire Suppression Tactics Reference Guide. Boise, ID, US: National Wildfire Coordinating Group.
- Neophytou, A., E. Richardson, and E. Mastorakos. 2012. Spark ignition of turbulent recirculating non-premixed gas and spray flames: A model for predicting ignition probability. Combust. Flame 159 (4):1503–22. doi:10.1016/j.combustflame.2011.12.015.
- Penney, G., D. Habibi, and M. Cattani. 2019. Firefighter tenability and its influence on wildfire suppression. Fire Saf. J. 106:38–51. doi:10.1016/j.firesaf.2019.03.012.
- Russo, L., P. Russo, C. I. Siettos, and M. Hanewinkel. 2016. A complex network theory approach for the spatial distribution of fire breaks in heterogeneous forest landscapes for the control of wildland fires. PLoS One 11 (10):1–18. doi:10.1371/journal.pone.0163226.
- Sullivan, A. L. 2017. Inside the inferno: Fundamental processes of wildland fire behaviour. Curr. For. Rep. 3 (2):132–49. doi:10.1007/s40725-017-0057-0.
- Wahlqvist, J., E. Ronchi, S. M. Gwynne, M. Kinateder, G. Rein, H. Mitchell, N. Bénichou, C. Ma, A. Kimball, and E. Kuligowski. 2021. The simulation of wildland-urban interface fire evacuation: The wui-nity platform. Saf. Sci. 136:105145. doi:10.1016/j.ssci.2020.105145.
- Xu, R., P. Yu, M. J. Abramson, F. H. Johnston, J. M. Samet, M. L. Bell, A. Haines, K. L. Ebi, S. Li, and Y. Guo. 2020. Wildfires, global climate change, and human health. N. Engl. J. Med. 383 (22):2173–81. doi:10.1056/NEJMsr2028985.
- Zhou, S., and A. Erdogan. 2019. A spatial optimization model for resource allocation for wildfire suppression and resident evacuation. Comput. Ind. Eng. 138:106101. doi:10.1016/j.cie.2019.106101.