
Abstract
Advances in assistive exoskeleton technology, and a boom in related scientific literature, prompted a need to review the potential use of exoskeletons in defence and security. A systematic review examined the evidence for successful augmentation of human performance in activities deemed most relevant to military tasks. Categories of activities were determined a priori through literature scoping and Human Factors workshops with military stakeholders. Workshops identified promising opportunities and risks for integration of exoskeletons into military use cases. The review revealed promising evidence for exoskeletons’ capacity to assist with load carriage, manual lifting, and working with tools. However, the review also revealed significant gaps in exoskeleton capabilities and likely performance levels required in the use case scenarios. Consequently, it was recommended that a future roadmap for introducing exoskeletons to military environments requires development of performance criteria for exoskeletons that can be used to implement a human-centred approach to research and development.
Practitioner Summary
We assessed the state-of-the-art for the use of wearable assistive exoskeletons in UK defence and security use cases. A full systematic review of the literature was undertaken, informed by use cases developed in military stakeholder workshops. Clear gaps in exoskeleton capability and use case requirements were identified, leading to recommendations for future work.
1. Introduction
Since the last turn of the century, significant effort has been injected to the development of wearable robotic exoskeletons intended to augment human performance. Augmentation in this context can mean enabling the user to optimise performance levels within their biological potential, or enhancing their capabilities beyond their biological potential. The applications for such devices are broad, with some designed as rehabilitation aids, others to enable movement following neuromuscular damage or disease, and many simply trying to augment the capabilities of healthy individuals. The latter focus has often been driven by defence and security organisations with an ultimate goal of enhancing the capabilities of military personnel. Augmented performance in walking, running, and load carriage has been a common goal in this context, with reducing the human energy cost of these activities being the main target of exoskeleton developers. As recently reviewed by Sawicki et al. (Citation2020), progress in this area in the last decade has been significant. From earlier tethered designs, through to current autonomous and fully wearable technologies, there are now multiple examples of both powered and passive exoskeletons that reduce the energy required from the human user to walk or run. Another key focus of exoskeleton technologies has been to assist with manual work. The primary goal of such exoskeletons has been to reduce the physical demands placed on workers and reduce the number of related injuries. Such devices have now reached the point of commercial development. With the great recent advancements in exoskeleton technology, it is timely to reconsider the potential for exoskeletons to be implemented in a defence and security setting. Mudie et al. (Citation2018) have recently published a conceptual framework that outlines key research stages that must be completed for exoskeletons to be introduced into service by the military. However, before procurement, it is prudent to investigate the existing opportunities across the military for implementing exoskeletons to augment humans performing job tasks, and review the existing evidence that exoskeletons can help with those tasks. By identifying current gaps in research or exoskeleton capabilities, a roadmap for introducing exoskeletons to military service can be further developed.
Therefore, the aim of this study was to systematically review the literature pertaining to exoskeletons for augmentation of human performance, within a UK military context. This review was undertaken to inform the development of a roadmap for the introduction of exoskeletons into military service. A preliminary sub-aim was to define and evaluate military use cases for exoskeletons in order to provide scope and context for the findings of the literature review.
2. Methods
2.1. Preliminary scoping review
To gauge the extent of the literature relevant to exoskeletons for augmentation of human performance, an initial scoping review was conducted. Databases searched were: Web of Science, IEEExplore, Athena (Ministry of Defence internal database) and Defence Technical Information Centre. The search terms and strategy (outlined in ) were designed to capture studies testing evidence of augmentation of human performance with wearable exoskeletons, but not testing of exoskeletons intended for medical purposes. Articles were then screened to identify what categories of exoskeleton had been tested in the published literature.
Table 1. Scoping search terms and strategy.
2.2. Human factors use case workshops with military stakeholders
Two human factors use case workshops were conducted with military stakeholders to separately evaluate two generalised military exoskeleton use cases for exoskeletons (). Each workshop was participated in by 4–6 currently serving UK military personnel, recruited for their relevant expertise, and including representatives of all main services (Army, Navy, Airforce). After being briefed on current exoskeleton technology and research, participants were asked to comment on the relevant exoskeleton use case. Participants were asked to identify the most promising opportunities, and the most important risks for implementing exoskeletons in that use case. The most important opportunities and risks were used to give specific military context to the discussion of the systematic literature review outcomes.
Table 2. Generalised military use case definitions.
2.3. Systematic review of literature
Following the scoping review and use case workshops, a full systematic search for literature was conducted in the following databases: PubMed, Web of Science, IEEEXplore, Scopus, and Athena. The search results were combined with those from the initial scoping review. The records were de-duplicated and initially screened for relevance based on title and abstract, with ineligible or irrelevant articles removed. The remaining results were eligibility screened based on the full text of the articles, and remaining ineligible articles removed. Articles that passed screening were categorised according to the scheme in before data extraction was completed and study quality was assessed.
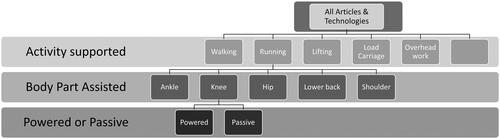
Figure 1. The hierarchical categorisation of scoped studies first categorised the articles based on the activity supported by the exoskeleton technology. Sub-categories were then created that organised the studies based on the body part where the device provided assistance, and whether the device used a power supply (powered) or relied on passive mechanisms.
2.3.1. Study identification (searching)
Based on the returned results, the search terms used during the scoping review were considered to be limited in capturing relevant studies that tested exoskeleton effectiveness without referring to augmentation or enhanced performance explicitly. In particular, many studies have focussed on mechanistic evidence for augmentation, such as reducing metabolic cost, electromyogram (EMG) activity, forces exerted on the user, or ratings of perceived exertion (RPE). It was also considered after pilot searching that the recent boom in wearable technologies for a vast range of purposes made the term ‘wearable technology’ too generic. shows the revised search terms as developed for Web of Science searching. The syntax used for the other databases is available in ESM 1. No limitations on study date were imposed, and the final search was completed on 30 May 2021.
Table 3. Revised database search strategy.
2.3.2. Selection of studies (screening)
Studies were screened against the exclusion criteria outlined in . Criterion EX2 () excluded studies that did not involve participants completing an activity identified through the workshops as being an opportunity of high importance for the use cases. This was done to focus the review on exoskeleton augmentation of activities of greatest value to military personnel. For studies to be included they must have tested exoskeleton augmentation of humans during load carriage, manual lifting, working with tools (overhead), or squatting and standing. Evidence for augmentation was considered as either direct evidence (improved task performance) or mechanistic evidence (measurements that indicate a mechanism for improved performance – e.g. metabolic power or EMG).
Table 4. Exclusion criteria.
2.3.3. Data extraction, quality assessment, and synthesis
Key data were extracted from studies that passed through screening and tabulated according to the categorisation scheme in . This included: participant group descriptors; study design; a broad description of the exoskeleton mechanism; the intended means of augmentation; main outcome measures used to assess augmentation; and whether or not the study showed evidence of augmentation. Each study also underwent a quality assessment using a modified version of a questionnaire developed by Harris, Wilson, and Vine (Citation2018), that drew its main items from the Quality Index of Down’s and Black (Downs and Black Citation1998), the Epidemiological Appraisal Instrument (Genaidy et al. Citation2007) and Durant’s (DuRant Citation1994) checklist for the evaluation of research articles. Harris, Wilson, and Vine (Citation2018) included items specific to their review purpose that were removed and replaced with items specifically linked to the current review topic. The final questionnaire consisted of 17 questions and is provided with study scoring in ESM 2. Each question was answered yes or no, and articles with 12 or more yes answers were considered high quality; 7–11 yes answers as medium quality; and articles with fewer than 7 yes answers as low quality. Study results were descriptively synthesised and a narrative review was composed.
3. Results
3.1. Scoping review outcomes
This initial search returned 289 articles that were imported into Endnote X8 software and de-duplicated. The literature scoping process identified that current literature had addressed seven activity categories for the top-level of hierarchical categorisation (). These categories were: walking, load carriage, running, manual lifting, manual work with tools (including overhead working), squatting and standing, and grasping. It was apparent that two broad applications of exoskeletons that encompassed sub-applications subject to similar general considerations had emerged: (1) Exoskeletons to augment performance in field operations (walking, load carriage, running); (2) Exoskeletons to augment performance in support operations (manual lifting, working with tools, squatting/standing).
3.2. Human factors use case workshop outcomes
In the operation use case workshop, participants reported and unanimously agreed across all three services, that the highest priority opportunity for the use of exoskeleton technology is in load carriage assistance over long distances, particularly in mountainous terrain. Rated slightly less important was the ability to increase speed of travel during a patrol. However, improved speed may result in an indirect benefit as the use of exoskeletons to support loads was expected to reduce fatigue and minimise the time required to rest. Improvement in cognitive performance (e.g. decision-making) was also identified as a potential indirect benefit resulting from reduced fatigue due to exoskeleton use. Unloaded walking and running were not prioritised as highly as load carriage, owing to the less frequent and less-demanding nature of these tasks.
In the support operations use case workshop, an opportunity for exoskeletons was identified to provide support for rearming of helicopters, specifically the fitting of Hellfire missiles to Apache aircraft. In the example, cranes and trolleys were deemed unsuitable given the variability of the terrain and the current requirement for personnel to lift missiles from the backs of trucks to then be fitted in confined spaces. A second opportunity also related to lifting support during maintenance/engineering tasks, but offered a speed advantage over the use of cranes or trolleys even when they were suitable. Both opportunities were considered as specific examples of the more general task of lifting and fitting heavy equipment.
3.3. Systematic literature review search results
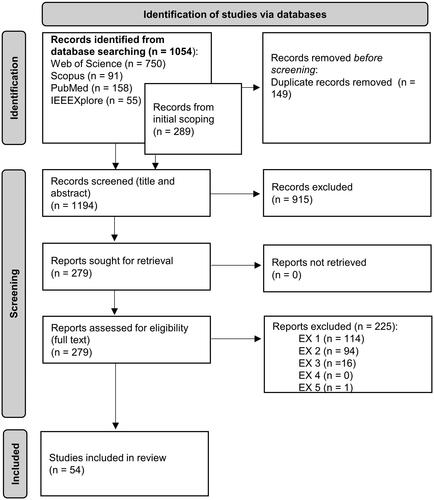
The finalised database searching returned 1054 records which were added to the existing records from the initial scoping search (289). Deduplication left 1194 items for title and abstract screening, and 279 items that went through to full text screening. After full text screening, 225 items were removed, linked to the following exclusion criteria: EX1 − 114, EX2 − 94, EX3 − 16, and EX5 − 1 (see for exclusion criteria definitions). This resulted in 54 articles for inclusion in the final review (process summarised in ).
Figure 2. PRISMA formatted flow diagram (Page et al. Citation2021) displaying literature search and screening results.
3.4. Summary of evidence extracted for exoskeletons to assist load carriage
Eighteen articles passed screening that described studies evaluating the ability of exoskeletons to augment human load carriage (). These were sub-categorised into passive and powered devices and are reported below with reference to which body parts they targeted with assistance.
Table 5. Key information extracted from studies evaluating the effects of exoskeletons for assisting load carriage.
3.4.1. Passive exoskeletons for load carriage
Four articles (Dijk, et al. Citation2018; Gregorczyk et al. Citation2010; Schiffman et al. Citation2008; Ketko et al. Citation2017) examined devices that passively offloaded multiple joints within the lower limb. Four of these devices sought to transfer backpack loads directly to the ground via passive links incorporating spring-damping elements, theoretically offloading the lower limbs. Van Dijk et al. (Citation2018) and Gregorczyk et al. (Citation2010) showed that passive leg support exoskeletons increased the rate of oxygen consumption (V̇O2) during walking with additional loads. However, van Dijk et al. (Citation2018) showed their device bore 30% of the backpack load, and reduced participants’ ratings of perceived exertion (RPE). Further to this, Schiffman et al. (Citation2008) tested the effects of the same exoskeleton as Gregorczyk et al. (Citation2010) on postural control and balance during standing. Bodily sway and limits of stability were reduced by the exoskeleton, but it is unclear if this is of benefit or hindrance to the wearer. Ketko et al. (Citation2017) evaluated a device that supported backpack load on a wheeled strut, pulled behind the user. Although this device reduced ground reaction force peaks (–40%) and pressure on the shoulders of the users, no direct testing for augmented performance was undertaken. Furthermore, Ketko et al.’s (Citation2017) device increased the stride-to-stride variability of underfoot centre of pressure location during loaded walking. Each of the experimental studies above were conducted with current or ex-military personnel as participants, and loads were representative of those carried by dismounted combatants in the US Army (Gregorczyk et al. Citation2010; Schiffman et al. Citation2008), Dutch Royal Marine Corps (Dijk, et al. Citation2018), or Israeli Defence Force (Ketko et al. Citation2017). One further study (Li et al. Citation2018) presented a spring-loaded knee device, designed to assist knee extension during stair climbing with added load. Although the results showed a general reduction in knee extensor muscle activity when the device was applied, this was not statistically confirmed and only five participants were included in the study.
3.4.2. Powered exoskeletons for load carriage
Exoskeletons that assisted the user with load carriage by applying powered support to lower limb joints were investigated in a further ten articles. Three studies (Lee et al. Citation2018; Malcolm et al. Citation2017; Panizzolo et al. Citation2016) used similar soft material exosuits with powered actuators to generate torque at the hip and ankle joints via cables routed from the lower back to the heel of a boot. In all cases using the device powered-on resulted in up to a 15% reduction in metabolic power during backpack loaded walking (loads were 6.8 kg and 23 kg). Sado et al. (Citation2018) used a full lower limb exoskeleton design that provided powered torque generation at the hip and knee joints to effect large reductions in vastus intermedius (43%) and gastrocnemius (60%) EMG magnitudes. These reductions were achieved for a task of walking while carrying a 2 kg toolbox in-hand. Also with a full lower limb device, Long et al. (Citation2018) provided powered torque assistance to the knee joint, and passive spring-loaded assistance to the hip and ankle joints during walking with a 30 kg backpack load. Although Long et al. (Citation2018) observed lower heart rates when using the exoskeleton, there was no statistical support for this outcome.
Three studies tested the use of powered exoskeletons that assisted at the hip joint only (Cao et al. Citation2021; Ding et al. Citation2016; Panizzolo et al. Citation2019). All three used similar exoskeleton design concepts, employing a soft exosuit with actuator-driven cables providing assistive torques at the hip joints. These studies showed that using a hip assisting device powered-on versus powered-off resulted in significant reductions in metabolic power (8–15%), with backpack loads of 15–23 kg. A further three studies tested exoskeletons that provided powered assistance to the ankle joint only. Ankle assistance reduced metabolic power (8–15%) in all three studies (Mooney, Rouse, and Herr Citation2014; Zhang et al. Citation2017; Galle et al. Citation2014).
A final category of exoskeletons to augment load carriage were powered devices that assisted the shoulders and lower back. Two studies were returned for this category (Poliero et al. Citation2020; Park et al. Citation2017). Park et al. (Citation2017) combined active and passive mechanisms to evenly distribute backpack load between shoulders and pelvis, and also bear the dynamic inertial forces generated by backpack motion. This device was shown to reduce metabolic power for walking with an additional load of 25% bodyweight (∼20 kg) by 8.7% (Park et al. Citation2017). Poliero et al. (Citation2020) showed that a powered exoskeleton assisting extension torque at the lower back and hips restricted hip motion and had no effect on lower back muscle EMG activity, when walking with up to 15 kg carried in-hand.
3.5. Summary of evidence extracted for exoskeletons to assist manual lifting
Twenty three articles passed screening that described studies evaluating the ability of exoskeletons to augment performance in manual lifting tasks. These were sub-categorised into passive and powered devices and are reported below with reference to which body parts they target with assistance.
3.5.1. Passive exoskeletons for manual lifting
Ten studies evaluated passive devices that provided assistance at the spine and pelvic region via stiff elastic elements (). One study assessed augmentation by testing the maximum weight an individual could lift (Baltrusch et al. Citation2018). By this metric no augmentation was achieved. Eight studies used EMG from spinal extensor muscles to evaluate the exoskeleton’s efficacy (Koopman, Kingma, et al. Citation2019; Madinei et al. Citation2020; Baltrusch et al. Citation2020; Koopman, Kingma, et al. Citation2020; Koopman, Kingma, et al. Citation2020; Baltrusch et al. Citation2019; Alemi et al. Citation2019; Thamsuwan et al. Citation2020). Findings were mixed, with three studies reporting that passive support did not affect EMG magnitudes (Koopman, Kingma, et al. Citation2019; Baltrusch et al. Citation2019; Thamsuwan et al. Citation2020), but the remaining five showing reductions in peak EMG signal up to 15–30% of maximal voluntary contractions (Madinei et al. Citation2020; Baltrusch et al. Citation2020; Koopman, Kingma, et al. Citation2020; Koopman, Kingma, et al. Citation2020; Alemi et al. Citation2019). One study also found that the exoskeleton device caused an increase in abdominal muscle peak EMG (Alemi et al. Citation2019). Mechanical loading on the lower back was assessed in four studies by calculating joint moments at the joint between the fifth lumbar vertebra and the sacrum (Koopman, Kingma, et al. Citation2019) or by using musculoskeletal modelling and simulation to calculate compressive loading in the lumbar spine (Koopman, Kingma, et al. Citation2020; Koopman, Kingma, et al. Citation2020; Picchiotti et al. Citation2019). Results were mixed, with two studies finding a reduction in spinal loading during lifting tasks with passive exoskeletons (Koopman, Kingma, et al. Citation2019; Koopman, Kingma, et al. Citation2020) and two finding no effect (Koopman, Kingma, et al. Citation2020; Picchiotti et al. Citation2019). Two studies employed measures of metabolic power during repetitive lifting tasks to evaluate their exoskeletons (Baltrusch et al. Citation2020; Baltrusch et al. Citation2019). Both studies found that the exoskeletons reduced metabolic costs of lifting tasks by 17–18% on average. However, Baltrusch et al. (Citation2019) showed that their lifting exoskeleton significantly increased the metabolic cost of walking by approximately 15%.
Table 6. Key information extracted from studies evaluating the effects of exoskeletons for assisting manual lifting.
There was one example of a passive exoskeleton that used springs to assist shoulder and arm muscles during lifting tasks (Theurel et al. Citation2018). Participants lifted, stacked and walked with a box weighing between 5 and 15 kg. Using the device during lifting and stacking tasks resulted in 50–70% reductions in shoulder muscle activity and was increasingly effective when larger masses were lifted. However, the stacking task took longer to complete with the exoskeleton, EMG in other muscles increased, and there was no effect on heart rate or perceived exertion of the participants.
3.5.2. Powered exoskeletons for manual lifting
Eleven studies tested exoskeletons to assist lifting using powered motors targeting the pelvic region and lower back. Ten of these studies used EMG recordings from spinal extensor muscles to assess such an exoskeleton’s ability to reduce muscular effort or load. Significant reductions in EMG signal magnitudes from spinal extensors were observed in eight of these studies; two showed reductions of approximately 15% (Huysamen, de Looze, et al. Citation2018; von Glinski et al. Citation2019), four studies observed reductions of 30–40% (Toxiri, Ortiz, et al. Citation2018; Yong et al. Citation2019; Koopman, Kingma, et al. Citation2019; Chen et al. Citation2018), and two 40–60% (Di Natali et al. Citation2021; Ji et al. Citation2020). One study additionally reported that an exoskeleton had no effect on heart rate variability or self-reported perceptions of exertion via the BORG scale despite reductions in EMG signals (von Glinski et al. Citation2019). A final study providing powered support at the pelvis and lower back recorded subjective user responses, but lacked a control condition for making comparisons relevant to this review (Toxiri, Ortiz, et al. Citation2018). Sado et al. (Citation2019) tested an exoskeleton that assisted using powered motors at the knee and hip, with a passive support connecting the exoskeleton frame across the ankle to the ground. Their results showed an average 36% reduction in EMG signal magnitude for one knee extensor muscle, and one ankle plantar flexor muscle.
3.6. Summary of evidence extracted for exoskeletons to assist overhead work & working with tools
Eight studies tested exoskeletons designed to assist overhead work or working with tools ( (Huysamen, de Looze, et al. Citation2018; Moyon, Poirson, and Petiot Citation2018; Otten, Weidner, and Argubi-Wollesen Citation2018; Spada et al. Citation2019; Spada et al. Citation2017; Hyun et al. Citation2019; de Vries, Krause, and de Looze Citation2021; Weston et al. Citation2018)). The tasks involved included: simulated engineering tasks with tools (Weston et al. Citation2018), drilling (Hyun et al. Citation2019), overhead setting screws and grinding (Otten, Weidner, and Argubi-Wollesen Citation2018), holding a tool overhead (Huysamen, de Looze, et al. Citation2018), overhead sanding (Moyon, Poirson, and Petiot Citation2018), and plastering (de Vries, Krause, and de Looze Citation2021). All of these papers assessed passive devices, seven of which used springs for support of the arms and shoulders (Huysamen, de Looze, et al. Citation2018; Moyon, Poirson, and Petiot Citation2018; Spada et al. Citation2019; Spada et al. Citation2017; Hyun et al. Citation2019; de Vries, Krause, and de Looze Citation2021; Weston et al. Citation2018), and one used pre-pressurised pneumatic gas struts (Otten, Weidner, and Argubi-Wollesen Citation2018). Three studies were assessed as being low quality and these showed mixed results (Moyon, Poirson, and Petiot Citation2018; Otten, Weidner, and Argubi-Wollesen Citation2018; Spada et al. Citation2017). Moyon, Poirson, and Petiot (Citation2018) and Otten, Weidner, and Argubi-Wollesen (Citation2018) showed reductions in cardiac cost and EMG from shoulder or arm muscles, respectively, but both only recorded these measures from a subset of participants. More positive findings were observed in medium and high quality studies. Huysamen, de Looze, et al. (Citation2018) found significant reductions in arm and back muscle EMG signals when holding a 2 kg weight overhead, and Spada et al. (Citation2019) showed a 56% increase in the time participants could hold their arms statically extended. In precision tasks, Spada et al. (Citation2019) also found exoskeletons resulted in faster execution times, greater precision scores, and lower self-reported exertion. EMG signals from arm and shoulder muscles were reduced by passive exoskeletons during drilling (Hyun et al. Citation2019) and plastering (de Vries, Krause, and de Looze Citation2021) tasks. However, Weston et al. (Citation2018) showed that an arm exoskeleton connected to a torso vest increased forces exerted by back muscles, and forces acting on the spine.
Table 7. Key information extracted from studies evaluating the effects of exoskeletons for assisting overhead work and work with tools.
3.7. Summary of evidence extracted for exoskeletons to assist standing and squatting
Five of the returned studies assessed exoskeletons to assist standing or squatting (). One study examined the effects of a passive knee exoskeleton on performance in a cognitive task (Sustained Attention to Response Test) lasting 4 minutes, while maintaining a semi-squatted posture (Bridger et al. Citation2018). Although heart rate was reduced (9 beats per minute) and participants’ perceived workload was lower with the exoskeleton, performance on the cognitive test was unaffected. Two studies used powered knee extension assistance during repeated sit-to-stand or squatting motions (Gams et al. Citation2013; Kim et al. Citation2013). Gams et al. (Citation2013) showed the exoskeleton significantly reduced metabolic power during five minutes of repeated squatting, and Kim et al. (Citation2013) found reductions in integrated EMG during sit-to-stand and squatting with loads up to 26 kg. One study presented unclear results for a passive knee extension-assist soft exosuit during 5 minutes of repeat sit-to-stand, with a statistically significant 3.2% reduction in metabolic power, no significant difference in RPE (despite a slight average reduction), and no consistent patterns in results for anaerobic threshold or EMG data (Lee, Kim, and Park Citation2020).
Table 8. Key information extracted from studies evaluating the effects of exoskeletons for assisting squatting and standing.
4. Discussion
4.1. Exoskeletons to assist load carriage
Carriage of additional loads beyond one’s own body mass significantly increases the energy cost of walking, and loads carried in backpacks are also a source of discomfort due to added pressure on the shoulders and torso (Knapik, Reynolds, and Harman Citation2004). Consequently, exoskeletons have been developed to bear some of the additional load and reduce the energy cost of walking while carrying such loads. In the military use case workshops, participants reported and unanimously agreed that the highest priority opportunity for the use of exoskeleton technology in defence and security is in the assistance it could provide the wearer in carrying heavy loads over long distances. The key benefit of any exoskeleton augmentation aimed at loaded walking will likely be to reduce the human energy cost. Workshop participants identified that this would benefit dismounted personnel by allowing them to walk for longer, covering greater distances, and/or arriving at their destination less fatigued (physically and cognitively) and in better condition to perform subsequent activities.
The main outcome measure used in the literature to evaluate exoskeleton effectiveness was the user’s metabolic power during loaded walking. Although metabolic power does not directly evidence augmentation, a reduction in metabolic power for a given walking speed theoretically predicts that the user could walk for longer before becoming fatigued or walk faster than usual for an equivalent energy cost. Of the studies returned, those that implemented powered assistance to the hip and/or ankle joints were most effective in reducing metabolic power for loaded walking, reporting reductions of 7–15% for carrying loads between 15 and 23 kg (Lee et al. Citation2018; Malcolm et al. Citation2017; Panizzolo et al. Citation2016; Sado et al. Citation2018; Cao et al. Citation2021; Ding et al. Citation2016; Panizzolo et al. Citation2019). No such reductions were achieved with passive devices that sought to unburden the user by transferring the backpack load directly to the ground (Dijk, et al. Citation2018; Gregorczyk et al. Citation2010; Ketko et al. Citation2017). This is despite passive load transfer devices significantly reducing the load borne by the user (Dijk, et al. Citation2018; Ketko et al. Citation2017). A probable explanation for this discrepancy is that the added mass of the passive devices offset the benefits of unloading, or that the semi-rigid designs restricted the user’s natural movement. This limitation highlights the need for lightweight designs that do not encumber the user’s movement and the potential value of the aforementioned fabric exosuit designs (e.g (Lee et al. Citation2018; Malcolm et al. Citation2017). However, the reductions in metabolic power observed with these exosuits have typically been reported by comparison of using the suit powered-on vs powered-off, when an ideal control condition would be loaded walking without wearing the suit at all. In these cases, it is not entirely clear if user performance is truly augmented compared to normal performance levels. Panizzolo et al. (Citation2016) showed that the reduction in metabolic power achieved was 7% when the mass of the device was accounted for, versus the 15% reported compared to a powered-off condition. Furthermore, there is evidence that wearing the aforementioned soft exosuit unpowered does not incur an increase in metabolic power relative to normal walking (Ding et al. Citation2016). These two results give confidence that the exosuits achieved a reduction in metabolic power, but it is likely closer to 7% than 15%. It should also be noted that some of the prototype designs tested did not require the user to carry the mass of the control system and actuators in any experimental condition (Malcolm et al. Citation2017; Ding et al. Citation2016; Zhang et al. Citation2017; Galle et al. Citation2014). Therefore, these particular studies show proof-of-concept for exoskeleton assistance rather than complete exoskeleton designs that can reduce the metabolic cost of load carriage.
Considering where on the lower limb to provide exoskeleton assistance, devices generating torque at the ankle or hip separately were able to reduce metabolic power by similar amounts (8–15%) for carrying loads of 15–23 kg (Lee et al. Citation2018; Malcolm et al. Citation2017; Sado et al. Citation2018; Cao et al. Citation2021; Ding et al. Citation2016; Panizzolo et al. Citation2019). However, the greater metabolic reductions observed for ankle exoskeletons were tested with only one participant as part of a larger study (Zhang et al. Citation2017). More complete work, showed an ankle exoskeleton to reduce metabolic power of walking with a 23 kg backpack by 8% (Mooney, Rouse, and Herr Citation2014). Interestingly, when exoskeletons were used to assist at both the hip and ankle, the metabolic power reduction was not further increased (Lee et al. Citation2018; Malcolm et al. Citation2017). The reason for this is unclear, although these different studies were not performed with the same exoskeleton hardware and control systems, making direct comparison challenging. Where best to provide assistance for load carriage remains an open question, although other factors such as locating device mass close to the body centre of mass will also affect this choice (adding mass distally to the limb is more metabolically costly). Powered assistance to hip and/or ankle joints appears a promising mode of exoskeleton assistance to augment load carriage, but it is worth noting that the studies reviewed here are entirely laboratory-based and involved highly controlled conditions. Studies were mostly conducted on treadmills at constant walking speeds. Adaptable control schemes that allow exoskeletons to adjust to the user task requirements outside the lab are becoming a reality (Kim et al. Citation2019), but are still in development. Furthermore, studies have begun to employ adaptation of exoskeleton control parameters to optimise performance for individual users, showing improved outcomes (Zhang et al. Citation2017). This highlights that a ‘one-size-fits-all’ approach to device assistance may be sub-optimal, and exoskeletons likely need to be programmed for each user to maximise benefits. Therefore exoskeleton designs with more tuneable control and stiffness parameters should be considered a priority for design and development.
Alternative to assisting the lower limb, two exoskeletons that assist load carriage at the torso and lower back were tested in the literature. Park et al. (Citation2017) used a device that combined passive backpack load distribution between shoulders and pelvis, with powered support to resist the backpack’s inertial forces. This combination reduced the metabolic cost of walking with an added load equivalent to 25% body weight by 8.7% (Park et al. Citation2017) and was linked to a reduction in EMG activity of associated muscles. However, Park et al.’s (Citation2017) result was in comparison to a control condition where the device was disconnected but still worn, so it is not clear if the benefits outweigh the unknown metabolic penalty for wearing the device alone. The device of Poliero et al. (Citation2020), was designed to assist manual lifting, however walking while carrying boxes with weight ranges from 1.2 to 15 kg was also assessed; users reported that the device hindered their walking, and hip range of motion and walking speed were reduced. This result highlights the significant challenge of designing exoskeletons to assist the main task performed by the user while not hindering other tasks that must be performed.
Considering the evidence above from a military use case perspective, it appears that exoskeletons for load carriage tested in the available literature are in very early stages of development. In the use case development and workshops, load carriage activities were considered of most importance to field-based operations for dismounted patrol. When undertaking long-distance load carriage walking activities, personnel will typically be spending extended periods away from their base of operations, potentially with limited or no vehicular support. This means that any equipment they take (including exoskeleton technology) will need to be carried/worn at all times. This is significant, as it raises a number of caveats and additional requirements associated with such exoskeleton technology. First, exoskeletons must not require access to external support (e.g. AC power) during the timeframe of the mission. Given that the most promising results identified above were for powered devices, a critical consideration will be whether power supply technology and device energy consumption are sufficiently developed for purpose. Here, exoskeletons that harvest energy to generate electricity (e.g. Donelan et al. Citation2008) may prove valuable. The workshops clearly identified a consideration that exoskeletons must not impede or hinder the many other activities that might be performed on patrol. At present, the reviewed work describes devices that support a specific task (e.g. walking on flat ground at a fixed speed). The only paper to investigate if an exoskeleton for one purpose hindered another activity showed that a lifting exoskeleton hindered walking performance (Poliero et al. Citation2020). Exoskeletons for military load carriage will need to be adaptable to dynamic user needs, or at least not hinder other activities when powered-off. Until these criteria are addressed, exoskeletons will not be suitable for deployment during combat operations. They also may need to be tuned to individual users, and the user familiarised with the exoskeleton, which links to another consideration raised in the workshops that there could be an increased training burden introduced by exoskeletons.
There is promising proof-of-concept evidence that exoskeletons could be used to augment load carriage by lowering the metabolic cost of loaded walking. The main application in defence and security would be for dismounted patrol, a task that introduces a number of considerations that must be taken into account in the development of load carriage exoskeletons moving forward. Mudie et al. (Citation2018) have proposed a framework for testing military exoskeletons that gradually increase the military-specific nature of testing protocols from lab-based experiments, to simulated field tasks, to military training exercises. This approach is logical, but we propose it could be augmented by integration into a broader human-centred design framework. Such an approach requires the military end-user to develop a priori requirements for exoskeleton performance that can be used in the decision to progress an exoskeleton from one stage of testing to the next. For example, what level of reduction in the metabolic cost of load carriage is sufficient evidence for augmented performance to warrant further investment in testing? What are the ‘deal-breakers’ or risks that an exoskeleton must be shown to avoid to warrant further investment? By adopting a human-centred design approach, the military end user can proactively influence the design process, leading to more efficient development of exoskeletons designed to fit the military use case.
4.2. Exoskeletons to assist manual lifting
Exoskeletons to assist manual lifting mostly used passive stiff-elastic elements or torque motors at the pelvis and lower back, to offload the spinal extensor muscles during lifting. These systems act in parallel with the lower spinal extensor muscles (erector spinae) and connect the torso to the pelvis and/or thighs in an effort to transfer loads between the two, bypassing the lumbar spine. Devices assessed in the literature were developed for the purpose of reducing the risk of lower-back injuries in industrial workforces who are required to perform repetitive manual lifting tasks. Although the present review was concerned with exoskeletons for human augmentation, as opposed to injury mitigation, the two purposes share a common mechanism of reducing the need for force production by the user’s muscles. Therefore, we reviewed studies that assessed whether exoskeletons could influence musculoskeletal loads, regardless of the intended purpose of the device. It is also valuable to compare the state-of-the-art to the needs of potential military use cases. The participants in the support use case workshop identified the opportunity for exoskeletons in assisting manual lifting tasks. A specific example was for arming Apache helicopters. It was considered that a trolley was impractical for this task due to potentially rough terrain and challenging access to the missile rail. However, the loads borne by personnel were greater than should be lifted manually, and if an exoskeleton could unload the user’s muscles sufficiently (augmenting user strength), this task could be made safer and more efficient. Therefore, the review also considers how relevant current findings are to this use case scenario.
The majority of studies used EMG from spinal extensor muscles to assess the load placed on the user, however the results were mixed. Thirteen studies showed that exoskeletons reduced spinal extensor EMG and seven showing no effect. Inconsistent results were present for both passive and powered devices, although powered devices more consistently reduced EMG signals. A potential explanation for the mixed results is the challenging nature of consistently measuring and interpreting EMG across studies. Spinal extensor muscles are complex, with multiple muscles and each having many compartments. EMG sensors record from a limited volume of muscle, and the signal recorded is sensitive to the exact location of the sensor relative to the underlying muscle. There are also many muscles in close proximity to the lumbar spine, resulting in potential cross-talk. Additionally there are deep spinal muscles that cannot be recorded from using surface EMG sensors. The choice of which metric to extract from the EMG signal is also problematic, with some studies choosing signal peaks (Koopman, Kingma, et al. Citation2020; Koopman, Kingma, et al. Citation2020; Thamsuwan et al. Citation2020; Huysamen, de Looze, et al. Citation2018; Toxiri, Ortiz, et al. Citation2018; Koopman, Kingma, et al. Citation2019; Lazzaroni et al. Citation2019), others integrate or take the root-mean-squared of the signal over the lifting task (von Glinski et al. Citation2019; Yong et al. Citation2019; Ji et al. Citation2020), some use the mean or median of the signal (Poliero et al. Citation2020; Koopman, Kingma, et al. Citation2019; Baltrusch et al. Citation2020; Baltrusch et al. Citation2019; Chen et al. Citation2018), and two took the average of the 90th percentile of the signal (Madinei et al. Citation2020; Di Natali et al. Citation2021). The choice of metric was not related to whether or not a study found a positive result. Furthermore, even with consistent methods, the relationship between a muscle’s EMG signal and the force that muscle is producing is highly complex. EMG is a measure of the neural drive reaching the muscle, and under static conditions has a reasonably linear relationship with that muscle’s force output (Enoka Citation2015). However, during dynamic movements the relationship is highly complex, being mediated by many factors including muscle length, velocity and contraction history (whether it has been lengthening or shortening for example) (Enoka Citation2015). Therefore, if an exoskeleton affects movement kinematics, a change in muscle activation may not correspond to a proportional change in muscle force. Some studies attempted to account for this by using EMG signals as input to computational musculoskeletal models that account for muscle length and velocity when computing muscle forces and spinal compression forces (Koopman, Kingma, et al. Citation2020; Koopman, Kingma, et al. Citation2020; Picchiotti et al. Citation2019). In two such studies with passive exoskeletons, one showed the exoskeleton reduced compressive load in the lumbar spine by up to 21%, but the other showed no effect (Koopman, Kingma, et al. Citation2020; Koopman, Kingma, et al. Citation2020). Koopman, Kingma, et al. (Citation2019) also used a musculoskeletal model to evidence that a powered exoskeleton reduced lumbar spine compression forces, although the exoskeleton also reduced movement speed. These mixed findings are despite similar methods for EMG measurement and musculoskeletal modelling. Therefore, the current evidence for whether exoskeletons to assist lifting are effective in reducing musculoskeletal loads in the lower back is unclear. Inconsistent application of EMG measurements and analysis may be partially responsible for mixed results, and incorporating musculoskeletal modelling to better estimate muscle and spinal forces should improve assessments of exoskeleton efficacy. However, musculoskeletal models are sensitive to model properties and the approach to computing muscle forces. Muscle forces are often computed using optimisation, and the chosen cost function to optimise can influence the outcomes. Therefore, researchers should also develop validated musculoskeletal models and simulation frameworks that can be used consistently across studies. Mudie et al. (Citation2018) recommended that a standard list of techniques, including EMG and musculoskeletal modelling, are used for the assessment of exoskeletons in development for military use. Here we recommend further that specific procedures for data acquisition, processing and analysis are determined for each technique, otherwise comparison between studies remains problematic.
A general opportunity raised in the support use case workshop was to augment the user’s lifting capacity such that tasks currently requiring a two-person lift or assistance with cranes could be carried out by an individual. However, only one study assessed whether a lifting exoskeleton could augment the user by increasing their maximal lifting capacity (Baltrusch et al. Citation2018). Although the result was that no augmentation was achieved, the study only required participants to lift a maximum of 23 kg, a load that participants were capable of lifting without an exoskeleton. If military organisations are to pursue exoskeletons for lifting, the weight of objects to be lifted must be identified in order to set targets for exoskeleton designers. In the example of arming a helicopter, the weight of the missile and the proportion of that weight which must be supported should be provided. To broaden the potential application, a review of similar tasks where a common exoskeleton design might be relevant could be undertaken to ascertain a minimum and maximum requirement for lifting capacity. In addition to lifting capacity, there are some other important distinctions between opportunities identified for the support use case and the problem of reducing lower back injuries that is considered by published work. First, exoskeletons for reducing lower back injuries are generally only concerned with offloading the lumbar spine. Therefore, such exoskeletons do not generally unload the upper or lower limbs. For significantly augmenting the user’s lifting capacity, it is likely that all involved muscle groups will require assistance. Only one study assessed an exoskeleton for assisting arm and shoulders muscles (Theurel et al. Citation2018), and this study showed mixed results in terms of the passive device’s ability to reduce EMG signals. One study assessed an exoskeleton that did provide support from the lower back down across to the lower extremities with connected torque motors at the hip and the knee and passive elements to transfer the load to the ground (Sado et al. Citation2019). This paper showed the exoskeleton successfully reduced selected leg muscle EMG. Therefore, it may well be possible to extend devices supporting the pelvis and lower back to also support the lower limb.
A common theme in the risks identified by workshop attendees was that the exoskeleton must not hinder performance of tasks that must be completed while wearing an exoskeleton. Some studies highlighted that their exoskeletons designed to assist lifting elevated metabolic cost (Baltrusch et al. Citation2019), reduced walking speed (Baltrusch et al. Citation2019), and restricted hip motion during walking (Poliero et al. Citation2020). Another showed an increase in abdominal muscle EMG during lifting tasks (Alemi et al. Citation2019). The vast majority of studies in the lifting category only evaluated the exoskeleton for a simple symmetrical lifting task. The fact that current lifting exoskeletons are designed for injury mitigation in industrial settings highlights the need for military end users to proactively set requirements for developers. Our workshops highlighted an opportunity for lifting exoskeletons in a military use case, but exoskeleton developers need to be informed of requirements and incentivised to develop appropriate exoskeletons. An understanding of what loads a lifting exoskeleton must bear to be of use to military support personnel and what concurrent activities must not be hindered for each use case is a necessary first step.
4.3. Exoskeletons to assist overhead work & working with tools
The exoskeletons tested in the eight returned studies were all passive. The exoskeletons supported the user by transferring loads that would normally be experienced by the arm to the torso or lower body. In principle, this mode of assistance should unload the smaller muscles of the arms, which are further disadvantaged when holding a tool with extended arms or working overhead. This category was reviewed as a specialised subset of lifting exoskeletons, as the main purpose is to alleviate muscular effort when working with additional mass in hand. However, it was considered separate, as the requirements differ in that the user is maintaining an upright body posture, and the arms are the main target for assistance. Overhead work or work with tools was deemed relevant to the military support use case as the workshop participants identified an opportunity to assist with removal and installation of components. The tasks assessed by studies were not military support tasks, but were considered relevant as generic examples of working overhead or with tools, potentially for extended periods of time. Most relevant perhaps was the simulated aerospace engineering tasks performed in Weston et al. (Citation2018). The value of supporting such tasks with an exoskeleton was anticipated to be reduced fatigue, increased working speed, and increased precision (due to reduced fatigue or discomfort). The higher quality studies in this category generally showed positive results in relation to each of these performance measures. Evidence from static (Huysamen, de Looze, et al. Citation2018) and dynamic (Hyun et al. Citation2019; de Vries, Krause, and de Looze Citation2021) tasks showed reductions in EMG activity with the use of exoskeletons. Furthermore, increased speed and precision of task performance was reported by Spada et al. (Citation2019). Positive findings were also supported by user reports of perceived effort (Spada et al. Citation2019; de Vries, Krause, and de Looze Citation2021). Therefore, evidence from generic tasks is promising for exoskeletons intended to assist overhead work or working with tools. However, there are some important further considerations. First, the same careful consideration of EMG data analysis and interpretation expressed in section 5.2 must be observed. Second, for military purposes, specific use case scenarios must be explored to understand user requirements and to design experiments to test these scenarios. Finally, it was shown by Weston et al. (Citation2018) that an exoskeleton transferring arm load to the torso increased back muscle and spine forces. This highlights the need for studies to assess if exoskeletons that offload the arms do so at the expense of other parts of the body. Exoskeletons that transfer the overhead load to the ground may have advantages over those that transfer the load to the body and require exploration.
4.4. Exoskeletons to assist standing and squatting
Squatting and standing are movements that cut across all aspects of activities performed within a defence and security context, including maintenance, routine support functions and front-line operations. In the case of dismounted patrol, this is likely to be a sub-function of an exoskeleton designed to assist loaded walking. For the support use case it is likely to be a sub-function of working with tools that involves standing or adopting a squatted posture for a prolonged period of time. Holding a squatted or standing position can be fatiguing and consequently affect personnel’s physiological, biomechanical and cognitive performance in concurrent tasks or tasks that follow. Bridger et al. (Citation2018) showed that, despite physiological effects and perceived assistance, an exoskeleton to support standing did not improve performance in cognitive tasks. One possible explanation for this is that the exoskeleton itself introduces a confounding cognitive demand, although it could simply be that the physiological benefit is too small (heart rate reduced by 9 beats.min−1) to affect cognitive function. Powered devices assisting at the knee were able to reduce the metabolic costs of repeat squatting or sit-to-stand (Gams et al. Citation2013; Kim et al. Citation2013), and one passive device supporting knee extension was shown to provide small (3.2%) but statistically significant reductions in metabolic cost during a repeated sit-to-stand task (Lee, Kim, and Park Citation2020). Alternatively, another study showed that passive hip assistance reduced the metabolic cost of sit-to-stand compared to wearing the device while it was not assisting (Junius et al. Citation2018). However, wearing the device alone increased the metabolic cost from not wearing the exoskeleton, resulting a net zero effect. The latter finding implies that passive assistance at the hip may be useful, if it can be applied with a device that hinders the user less. Therefore, evidence suggests that the demands of prolonged standing or squatting may be reduced with exoskeleton support. In the support use case such exoskeleton assistance might be most applicable when integrated with upper body devices to assist manual handling or work, meeting a need to transfer loads in-hand to the lower limb and potentially the ground. In particular, powered support to knee extensors seems beneficial. For dismounted patrol, support for standing is likely to be an additional benefit provided by a load carriage assist device. Exoskeletons acting at the knee specifically were not highlighted when reviewing the load carriage literature, but could become more important when studies consider incline and decline locomotion with added load (Nuckols et al. Citation2020), or energy harvesting functionality (Donelan et al. Citation2008).
4.5. Limitations
There are several limitations to the approach employed in this piece of work. Firstly, the use case workshops represented an exercise in technology-push. Participants were asked only to consider opportunities for exoskeletons to augment performance, not whether or not an exoskeleton was the most appropriate solution to the problem. Furthermore, the work only considered opportunities for exoskeletons to augment personnel in their roles as they currently exist. An alternative approach might also consider if exoskeletons could be employed to change the way military personnel operate for the better. In a similar vein, participants were briefed on exoskeletons using examples of extant technologies and were not asked to consider idealised technology solutions. This was to maintain realistic expectations given the state-of-the-art. Related to the literature review process, only papers published in peer-reviewed journals were considered. This may have excluded some grey literature produced by military sources. Furthermore, it is recognised that commercial exoskeletons may be developed without internal testing results being published in scientific literature. Therefore exoskeletons may have been developed and tested that could not be considered here. For example, some branches of the British armed forces have introduced a dynamic weight distribution system to assist with load carriage, but evidence for its effectiveness has not been openly published. Finally, the review scope was restricted to the most relevant categories of exoskeleton as determined from the workshops. This led to a wealth of papers examining exoskeletons to assist unloaded walking and running being omitted. The justification for this is that a dismounted patrol would rarely walk or run without any additional loads. For a review of state-of-the-art research on exoskeletons to assist unloaded locomotion, the reader is referred to Sawicki et al. (Citation2020).
4.6. Next steps towards a roadmap for introducing exoskeletons to military service
Several key emerging themes from the literature review have led to the following recommendations for the next steps in developing a roadmap for introducing exoskeletons to military service:
Research is required to develop ‘augmentation thresholds’ for experimentally measured changes in outcome variables that represent meaningful augmentation in each military use case. For example, what percent reduction in the metabolic cost of carrying a standard added load results in improved physical or cognitive performance during or at the end of a typical patrol?
Work must be done to establish a battery of tasks that personnel must complete during specific use cases. These can be used to design experiments that also test if an exoskeleton will hinder tasks other than the one it is designed to assist.
Use case-specific standardised experimental protocols should be designed to test if augmentation thresholds are met. These protocols can provide a standard test for exoskeletons designed for a given use case, and can be used to fairly compare different devices intended to provide the same function.
Use case-specific experimental measurement and data processing standards should be developed to ensure consistency across testing of different devices. This could include standard procedures for measurement of motion capture, ground reaction forces, and EMG, for example. It might also include approved processes for musculoskeletal modelling and data processing and analysis.
Augmentation thresholds, lists of tasks, standardised protocols and procedures should all be made available to researchers and developers to help drive design concepts towards military adoption.
Furthermore, elements from point five should be incorporated into a design specification that also outlines how exoskeletons must integrate with other body-borne systems, state what tasks it must not hinder, and specify other fundamental design features. Engaging developers with working towards such specifications may require significant investment from the military services.
Exoskeletons should be experimentally shown to meet augmentation thresholds and not hinder other tasks in a lab environment before progression to field testing. This does not preclude early stage engagement of military stakeholders, whose input could help shape the development and use of exoskeleton technologies.
Existing military exoskeleton testing frameworks should be expanded to incorporate more use cases beyond that of dismounted patrol.
Exoskeletons should not be evaluated in isolation from other research and development programmes seeking to address similar problems. This will help avoid progression of exoskeleton technologies that are superseded by alternative technologies or solutions.
Some valuable key points were also raised in relation to the most promising current design concepts. First, exoskeletons that can be tuned to assist individual users differently are likely to be more effective than a one-size-fits-all approach. Second, for the load carriage use case, exoskeletons that assist at the hip and ankle are most promising to pursue, particularly if they are lightweight. Third, due to the more predictable environment and the task-specific nature of current exoskeletons, implementing exoskeletons for a support use case is more feasible than for a dismounted patrol use case, in the shorter term.
4.7. Conclusions
Via scoping of the extant scientific literature, this study identified two generalised military use cases for exoskeletons. The dismounted patrol use case and the support operations use case were validated by suitably qualified and experienced serving members of the British Army, Royal Navy, Royal Marines and Royal Air Force. Validation occurred during human factors workshops that also identified a register of considerations for each use case, including opportunities and risks. The greatest opportunities for exoskeletons were to assist dismounted patrol in load carriage and to assist support personnel in lifting and fitting components, including arming aircraft with missiles. A systematic search and review of the literature highlighted promising evidence for exoskeletons’ capacity to assist with load carriage, manual lifting and working with tools. However, the review also revealed significant gaps in exoskeleton capabilities and likely performance levels required in the use case scenarios. Load carriage exoskeletons were considered to be in early stages of development, and exoskeletons for manual lifting and working with tools had been developed with a non-military purpose. It is recommended that military-specific device requirements be determined to inform the development of future exoskeletons for military use cases. Additionally, a human-centred design framework should be adopted in order to advance future research and development efforts. Research studies involving humans within this framework also require standardised experimental measurement procedures for data collection and analysis, to ensure consistency and valid comparisons between studies.
| Abbreviations | ||
| AC | = | alternating current |
| EMG | = | electromyogram |
| ESM | = | electronic supplementary material |
| RPE | = | ratings of perceived exertion |
TERG-2021-0525-File013.docx
Download MS Word (19.5 KB)TERG-2021-0525-File012.docx
Download MS Word (13.1 KB)Disclosure statement
No potential conflict of interest was reported by the authors.
Data availability statement
Data to accompany this article have been made available in the supplementary materials.
Additional information
Funding
Related Research Data
References
- Alemi, Mohammad Mehdi, Jack Geissinger, Athulya A. Simon, S Emily Chang, and Alan T. Asbeck. 2019. “A Passive Exoskeleton Reduces Peak and Mean EMG during Symmetric and Asymmetric Lifting.” Journal of Electromyography and Kinesiology 47: 25–34. doi:10.1016/j.jelekin.2019.05.003.
- Baltrusch, S J., J H. van Dieën, A S. Koopman, M B. Näf, C. Rodriguez-Guerrero, J. Babič, and H. Houdijk. 2020. “SPEXOR Passive Spinal Exoskeleton Decreases Metabolic Cost during Symmetric Repetitive Lifting.” European Journal of Applied Physiology 120 (2): 401–412. doi:10.1007/s00421-019-04284-6.
- Baltrusch, S J., J H. van Dieën, C A M. van Bennekom, and H. Houdijk. 2018. “The Effect of a Passive Trunk Exoskeleton on Functional Performance in Healthy Individuals.” Applied Ergonomics 72: 94–106. doi:10.1016/j.apergo.2018.04.007.
- Baltrusch, S J., J H. van Dieën, S M. Bruijn, A S. Koopman, C A M. van Bennekom, and H. Houdijk. 2019. “The Effect of a Passive Trunk Exoskeleton on Metabolic Costs during Lifting and Walking.” Ergonomics 62 (7): 903–916. doi:10.1080/00140139.2019.1602288.
- Bridger, R.S., A.I. Ashford, S. Wattie, K. Dobson, I. Fisher, and P.J. Pisula. 2018. “Sustained Attention When Squatting with and without an Exoskeleton for the Lower Limbs.” International Journal of Industrial Ergonomics 66: 230–239. doi:10.1016/j.ergon.2018.03.005.
- Cao, Wujing, Chunjie Chen, Hongyue Hu, Kai Fang, and Xinyu Wu. 2021. “Effect of Hip Assistance Modes on Metabolic Cost of Walking With a Soft Exoskeleton.” IEEE Transactions on Automation Science and Engineering 18 (2): 426–436. doi:10.1109/TASE.2020.3027748.
- Chen, B., L. Grazi, F. Lanotte, N. Vitiello, and S. Crea. 2018. “A Real-Time Lift Detection Strategy for a Hip Exoskeleton.” Front Neurorobot 12: 17.
- de Vries, A.W., F. Krause, and M.P. de Looze. 2021. “The Effectivity of a Passive Arm Support Exoskeleton in Reducing Muscle Activation and Perceived Exertion during Plastering Activities.” Ergonomics 64 (6): 712–721. doi:10.1080/00140139.2020.1868581.
- Di Natali, Christian, Giorgia Chini, Stefano Toxiri, Luigi Monica, Sara Anastasi, Francesco Draicchio, Darwin Caldwell, and Jesús Ortiz. 2021. “Equivalent Weight: Connecting Exoskeleton Effectiveness with Ergonomic Risk during Manual Material Handling.” International Journal of Environmental Research and Public Health 18 (5): 2677. doi:10.3390/ijerph18052677.
- Van Dijk, W., T. Van de Wijdeven, M.M. Holscher, R. Barents, R. Konemann, F. Krause, and C.L. Koerhuis. 2018. “Exobuddy – A Non-Anthropomorphic Quasi-Passive Exoskeleton for Load Carrying Assistance.” In 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob).
- Ding, Ye, Fausto A. Panizzolo, Christopher Siviy, Philippe Malcolm, Ignacio Galiana, Kenneth G. Holt, and Conor J. Walsh. 2016. “Effect of Timing of Hip Extension Assistance during Loaded Walking with a Soft Exosuit.” Journal of Neuroengineering and Rehabilitation 13 (1): 87.
- Donelan, J M., Q. Li, V. Naing, J A. Hoffer, D J. Weber, and A D. Kuo. 2008. “Biomechanical Energy Harvesting: Generating Electricity during Walking with Minimal User Effort.” Science 319 (5864): 807–810. doi:10.1126/science.1149860.
- Downs, S.H., and N. Black. 1998. “The Feasibility of Creating a Checklist for the Assessment of the Methodological Quality Both of Randomised and Non-Randomised Studies of Health Care Interventions.” Journal of Epidemiology and Community Health 52 (6): 377–384. doi:10.1136/jech.52.6.377.
- DuRant, R.H. 1994. “Checklist for the Evaluation of Research Articles.” The Journal of Adolescent Health 15 (1): 4–8. doi:10.1016/1054-139X(94)90381-6.
- Enoka, R.M. 2015. Neuromechanics of Human Movement, 5th ed. Champaign, IL: Human Kinetics.
- Galle, Samuel, Philippe Malcolm, Wim Derave, and Dirk De Clercq. 2014. “Enhancing Performance during Inclined Loaded Walking with a Powered Ankle-Foot Exoskeleton.” European Journal of Applied Physiology 114 (11): 2341–2351. doi:10.1007/s00421-014-2955-1.
- Gams, Andrej, Tadej Petric, Tadej Debevec, and Jan Babic. 2013. “Effects of Robotic Knee Exoskeleton on Human Energy Expenditure.” IEEE Transactions on Bio-Medical Engineering 60 (6): 1636–1644. doi:10.1109/TBME.2013.2240682.
- Genaidy, A M., G K. Lemasters, J. Lockey, P. Succop, J. Deddens, T. Sobeih, and K. Dunning. 2007. “An Epidemiological Appraisal Instrument – A Tool for Evaluation of Epidemiological Studies.” Ergonomics 50 (6): 920–960. doi:10.1080/00140130701237667.
- Gregorczyk, Karen N., Leif Hasselquist, Jeffrey M. Schiffman, Carolyn K. Bensel, John P. Obusek, and David J. Gutekunst. 2010. “Effects of a Lower-Body Exoskeleton Device on Metabolic Cost and Gait Biomechanics during Load Carriage.” Ergonomics 53 (10): 1263–1275. doi:10.1080/00140139.2010.512982.
- Harris, D.J., M.R. Wilson, and S.J. Vine. 2018. “A Systematic Review of Commercial Cognitive Training Devices: Implications for Use in Sport.” Frontiers in Psychology 9: 709.
- Huysamen, Kirsten, Michiel de Looze, Tim Bosch, Jesus Ortiz, Stefano Toxiri, and Leonard W. O'Sullivan. 2018. “Assessment of an Active Industrial Exoskeleton to Aid Dynamic Lifting and Lowering Manual Handling Tasks.” Applied Ergonomics 68: 125–131. doi:10.1016/j.apergo.2017.11.004.
- Huysamen, Kirsten, Tim Bosch, Michiel de Looze, Konrad S. Stadler, Eveline Graf, and Leonard W. O’Sullivan. 2018. “Evaluation of a Passive Exoskeleton for Static Upper Limb Activities.” Applied Ergonomics 70: 148–155. doi:10.1016/j.apergo.2018.02.009.
- Hyun, Dong Jin., KiHyeon Bae, KyuJung Kim, Seungkyu Nam, and Dong-hyun Lee. 2019. “A Light-Weight Passive Upper Arm Assistive Exoskeleton Based on Multi-Linkage Spring-Energy Dissipation Mechanism for Overhead Tasks.” Robotics and Autonomous Systems 122: 103309. doi:10.1016/j.robot.2019.103309.
- Ji, Xinyu, Dashuai Wang, Pengfei Li, Liangsheng Zheng, Jianquan Sun, and Xinyu Wu. 2020. “SIAT-WEXv2: A Wearable Exoskeleton for Reducing Lumbar Load during Lifting Tasks.” Complexity 2020: 1–12. doi:10.1155/2020/8849427.
- Junius, Karen, Nina Lefeber, Eva Swinnen, Bram Vanderborght, and Dirk Lefeber. 2018. “Metabolic Effects Induced by a Kinematically Compatible Hip Exoskeleton during STS.” IEEE Transactions on Bio-Medical Engineering 65 (6): 1399–1409. doi:10.1109/TBME.2017.2754922.
- Ketko, Itay, Meir Plotnik, Ran Yanovich, Amit Gefen, and Yuval Heled. 2017. “Wheeled Assistive Device for Load carriage - the effects on human gait and biomechanics.” Ergonomics 60 (10): 1415–1424. doi:10.1080/00140139.2017.1308561.
- Kim, Jinsoo, Giuk Lee, Roman Heimgartner, Dheepak Arumukhom Revi, Nikos Karavas, Danielle Nathanson, Ignacio Galiana, Asa Eckert-Erdheim, Patrick Murphy, David Perry, Nicolas Menard, Dabin Kim Choe, Philippe Malcolm, and Conor J. Walsh. 2019. “Reducing the Metabolic Rate of Walking and running with a versatile, portable exosuit.” Science 365 (6454): 668–672. doi:10.1126/science.aav7536.
- Kim, Kyung, Chang-Ho Yu, Gu-Young Jeong, Min Heo, and Tae-Kyu Kwon. 2013. “Analysis of the Assistance Characteristics for the Knee Extension Motion of Knee Orthosis Using Muscular Stiffness Force Feedback.” Journal of Mechanical Science and Technology 27 (10): 3161–3169. doi:10.1007/s12206-013-0837-9.
- Knapik, J.J., K.L. Reynolds, and E. Harman. 2004. “Soldier Load Carriage: Historical, Physiological, Biomechanical, and Medical Aspects.” Military Medicine 169 (1): 45–56. doi:10.7205/milmed.169.1.45.
- Koopman, Axel S., Idsart Kingma, Gert S. Faber, Michiel P. de Looze, and Jaap H. van Dieën. 2019. “Effects of a Passive Exoskeleton on the Mechanical Loading of the Low Back in Static Holding Tasks.” Journal of Biomechanics 83: 97–103. doi:10.1016/j.jbiomech.2018.11.033.
- Koopman, Axel S., Idsart Kingma, Michiel P. de Looze, and Jaap H. van Dieën. 2020. “Effects of a Passive Back Exoskeleton on the Mechanical Loading of the Low-Back during Symmetric Lifting.” Journal of Biomechanics 102: 109486. doi:10.1016/j.jbiomech.2019.109486.
- Koopman, Axel S., Matthias Näf, Saskia J. Baltrusch, Idsart Kingma, Carlos Rodriguez-Guerrero, Jan Babič, Michiel P. de Looze, and Jaap H. van Dieën. 2020. “Biomechanical Evaluation of a New Passive Back Support Exoskeleton.” Journal of Biomechanics 105: 109795. doi:10.1016/j.jbiomech.2020.109795.
- Koopman, Axel S., Stefano Toxiri, Valerie Power, Idsart Kingma, Jaap H. van Dieën, Jesús Ortiz, and Michiel P. de Looze. 2019. “The Effect of Control Strategies for an Active Back-Support Exoskeleton on Spine Loading and Kinematics during Lifting.” Journal of Biomechanics 91: 14–22. doi:10.1016/j.jbiomech.2019.04.044.
- Lazzaroni, M., S. Toxiri, D. G. Caldwell, S. Anastasi, L. Monica, E. D. Momi, and J. Ortiz. 2019. “Acceleration-Based Assistive Strategy to Control a Back-Support Exoskeleton for Load Handling: Preliminary Evaluation.” In 2019 IEEE 16th International Conference on Rehabilitation Robotics, 625–630. New York: IEEE.
- Lee, H., S.H. Kim, and H.S. Park. 2020. “A Fully Soft and Passive Assistive Device to Lower the Metabolic Cost of Sit-to-Stand.” Frontiers in Bioengineering and Biotechnology 8: 11. doi:10.3389/fbioe.2020.00966.
- Lee, Sangjun, Jinsoo Kim, Lauren Baker, Andrew Long, Nikos Karavas, Nicolas Menard, Ignacio Galiana, and Conor J. Walsh. 2018. “Autonomous Multi-Joint Soft Exosuit with Augmentation-Power-Based Control Parameter Tuning Reduces Energy Cost of Loaded Walking.” Journal of NeuroEngineering and Rehabilitation 15 (1): 9. doi:10.1186/s12984-018-0410-y.
- Li, Bo, Bo Yuan, Shuai Tang, Yuwen Mao, Dongmei Zhang, Changyun Huang, and Bilian Tan. 2018. “Biomechanical Design Analysis and Experiments Evaluation of a Passive Knee-Assisting Exoskeleton for Weight-Climbing.” Industrial Robot 45 (4): 436–445. doi:10.1108/IR-11-2017-0207.
- Long, Yi, Zhi-jiang Du, Wei-dong Wang, and Wei Dong. 2018. “Human Motion Intent Learning Based Motion Assistance Control for a Wearable Exoskeleton.” Robotics and Computer-Integrated Manufacturing 49: 317–327. doi:10.1016/j.rcim.2017.08.007.
- Madinei, Saman, Mohammad Mehdi Alemi, Sunwook Kim, Divya Srinivasan, and Maury A. Nussbaum. 2020. “Biomechanical Assessment of Two Back-Support Exoskeletons in Symmetric and Asymmetric Repetitive Lifting with Moderate Postural Demands.” Applied Ergonomics 88: 103156. doi:10.1016/j.apergo.2020.103156.
- Malcolm, Philippe, Sangjun Lee, Simona Crea, Christopher Siviy, Fabricio Saucedo, Ignacio Galiana, Fausto A. Panizzolo, Kenneth G. Holt, and Conor J. Walsh. 2017. “Varying Negative Work Assistance at the Ankle with a Soft Exosuit during Loaded Walking.” Journal of NeuroEngineering and Rehabilitation 14 (1): 12. doi:10.1186/s12984-017-0267-5.
- Mooney, L.M., E.J. Rouse, and H.M. Herr. 2014. “Autonomous Exoskeleton Reduces Metabolic Cost of Human Walking during load carriage.” Journal of Neuroengineering and Rehabilitation 11: 80. doi:10.1186/1743-0003-11-80.
- Moyon, A., E. Poirson, and J.-F. Petiot. 2018. “Experimental Study of the Physical Impact of a Passive Exoskeleton on Manual Sanding Operations.” Procedia CIRP 70: 284–289. doi:10.1016/j.procir.2018.04.028.
- Mudie, Kurt L., Angela C. Boynton, Thomas Karakolis, Meghan P. O’Donovan, Gregory B. Kanagaki, Harrison P. Crowell, Rezaul K. Begg, Michael E. LaFiandra, and Daniel C. Billing. 2018. “Consensus Paper on Testing and Evaluation of Military Exoskeletons for the Dismounted Combatant.” Journal of Science and Medicine in Sport 21 (11): 1154–1161. doi:10.1016/j.jsams.2018.05.016.
- Nuckols, Richard W., Kota Z. Takahashi, Dominic J. Farris, Sarai Mizrachi, Raziel Riemer, and Gregory S. Sawicki. 2020. “Mechanics of Walking and Running Up and Downhill: A Joint-Level Perspective to Guide Design of Lower-Limb Exoskeletons.” PLoS One 15 (8): e0231996. doi:10.1371/journal.pone.0231996.
- Otten, B.M., R. Weidner, and A. Argubi-Wollesen. 2018. “Evaluation of a Novel Active Exoskeleton for Tasks at or above Head Level.” IEEE Robotics and Automation Letters 3 (3): 2408–2415. doi:10.1109/LRA.2018.2812905.
- Page, Matthew J., Joanne E. McKenzie, Patrick M. Bossuyt, Isabelle Boutron, Tammy C. Hoffmann, Cynthia D. Mulrow, Larissa Shamseer, Jennifer M. Tetzlaff, Elie A. Akl, Sue E. Brennan, Roger Chou, Julie Glanville, Jeremy M. Grimshaw, Asbjørn Hróbjartsson, Manoj M. Lalu, Tianjing Li, Elizabeth W. Loder, Evan Mayo-Wilson, Steve McDonald, Luke A. McGuinness, Lesley A. Stewart, James Thomas, Andrea C. Tricco, Vivian A. Welch, Penny Whiting, and David Moher. 2021. “The PRISMA 2020 Statement: An Updated Guideline for Reporting Systematic Reviews.” BMJ 372: n71. doi:10.1136/bmj.n71.
- Panizzolo, Fausto A., Gregory M. Freisinger, Nikos Karavas, Asa M. Eckert-Erdheim, Christopher Siviy, Andrew Long, Rebecca A. Zifchock, Michael E. LaFiandra, and Conor J. Walsh. 2019. “Metabolic Cost Adaptations during Training with a Soft Exosuit Assisting the Hip Joint.” Scientific Reports 9 (1): 10. doi:10.1038/s41598-019-45914-5.
- Panizzolo, Fausto A., Ignacio Galiana, Alan T. Asbeck, Christopher Siviy, Kai Schmidt, Kenneth G. Holt, and Conor J. Walsh. 2016. “A Biologically-Inspired Multi-Joint Soft Exosuit That Can Reduce the Energy Cost of Loaded Walking.” Journal of NeuroEngineering and Rehabilitation 13 (1): 13. doi:10.1186/s12984-016-0150-9.
- Park, Joon-Hyuk, Paul Stegall, Haohan Zhang, and Sunil Agrawal. 2017. “Walking With aBackpack Using Load Distribution and Dynamic Load Compensation Reduces Metabolic Cost and Adaptations to Loads.” IEEE Transactions on Neural Systems and Rehabilitation Engineering 25 (9): 1419–1430. doi:10.1109/TNSRE.2016.2627057.
- Picchiotti, Michael T., Eric B. Weston, Gregory G. Knapik, Jonathan S. Dufour, and William S. Marras. 2019. “Impact of Two Postural Assist Exoskeletons on Biomechanical Loading of the Lumbar Spine.” Applied Ergonomics 75: 1–7. doi:10.1016/j.apergo.2018.09.006.
- Poliero, Tommaso, Maria Lazzaroni, Stefano Toxiri, Christian Di Natali, Darwin G. Caldwell, and Jesús Ortiz. 2020. “Applicability of an Active Back-Support Exoskeleton to Carrying Activities.” Frontiers in Robotics and AI 7: 13. doi:10.3389/frobt.2020.579963.
- Sado, Fatai, Hwa Jen Yap, Raja Ariffin Raja Ghazilla, and Norhafizan Ahmad. 2018. “Exoskeleton Robot Control for Synchronous Walking Assistance in Repetitive Manual Handling Works Based on Dual Unscented Kalman Filter.” PLoS One 13 (7): e0200193. doi:10.1371/journal.pone.0200193.
- Sado, Fatai, Hwa Jen Yap, Raja Ariffin Raja Ghazilla, and Norhafizan Ahmad. 2019. “Design and Control of a Wearable Lower-Body Exoskeleton for Squatting and Walking Assistance in Manual Handling Works.” Mechatronics 63: 102272. doi:10.1016/j.mechatronics.2019.102272.
- Sawicki, Gregory S., Owen N. Beck, Inseung Kang, and Aaron J. Young. 2020. “The Exoskeleton Expansion: Improving Walking and Running Economy.” Journal of NeuroEngineering and Rehabilitation 17 (1): 9. doi:10.1186/s12984-020-00663-9.
- Schiffman, Jeffrey M., Karen N. Gregorczyk, Carolyn K. Bensel, Leif Hasselquist, and John P. Obusek. 2008. “The Effects of a Lower Body Exoskeleton Load Carriage Assistive Device on Limits of Stability and Postural Sway.” Ergonomics 51 (10): 1515–1529. doi:10.1080/00140130802248084.
- Spada, S., L. Ghibaudo, C. Carnazzo, L. Gastaldi, M. P. Cavatorta. 2019. “Passive Upper Limb Exoskeletons: An Experimental Campaign with Workers.” In Proceedings of the 20th Congress of the International Ergonomics Association, edited by S. Bagnara., et al., 230–239. Cham: Springer International Publishing Ag.
- Spada, Stefania, Lidia Ghibaudo, Silvia Gilotta, Laura Gastaldi, and Maria Pia Cavatorta. 2017. “Investigation into the Applicability of a Passive Upper-Limb Exoskeleton in Automotive Industry.” Procedia Manufacturing 11: 1255–1262. doi:10.1016/j.promfg.2017.07.252.
- Thamsuwan, Ornwipa, Stephan Milosavljevic, Divya Srinivasan, and Catherine Trask. 2020. “Potential Exoskeleton Uses for Reducing Low Back Muscular Activity during Farm Tasks.” American Journal of Industrial Medicine 63 (11): 1017–1028. doi:10.1002/ajim.23180.
- Theurel, Jean, Kevin Desbrosses, Terence Roux, and Adriana Savescu. 2018. “Physiological Consequences of Using an Upper Limb Exoskeleton during Manual Handling Tasks.” Applied Ergonomics 67: 211–217. doi:10.1016/j.apergo.2017.10.008.
- Toxiri, S., J. Ortiz, and D.G. Caldwell. 2018. “Assistive Strategies for a Back Support Exoskeleton: Experimental Evaluation.” In Advances in Service and Industrial Robotics, edited by C. Ferraresi and G. Quaglia, 805–812. Switzerland: Springer Nature.
- Toxiri, Stefano, Axel S. Koopman, Maria Lazzaroni, Jesús Ortiz, Valerie Power, Michiel P. de Looze, Leonard O'Sullivan, and Darwin G. Caldwell. 2018. “Rationale, Implementation and Evaluation of Assistive Strategies for an Active Back-Support Exoskeleton.” Frontiers in Robotics and AI 5: 53. doi:10.3389/frobt.2018.00053.
- von Glinski, Alexander, Emre Yilmaz, Silvia Mrotzek, Eike Marek, Birger Jettkant, Alexis Brinkemper, Christian Fisahn, Thomas A. Schildhauer, and Jan Geßmann. 2019. “Effectiveness of an on-Body Lifting Aid (HAL® for Care Support) to Reduce Lower Back Muscle Activity during Repetitive Lifting Tasks.” Journal of Clinical Neuroscience 63: 249–255. doi:10.1016/j.jocn.2019.01.038.
- Weston, Eric B., Mina Alizadeh, Gregory G. Knapik, Xueke Wang, and William S. Marras. 2018. “Biomechanical Evaluation of Exoskeleton Use on Loading of the Lumbar Spine.” Applied Ergonomics 68: 101–108. doi:10.1016/j.apergo.2017.11.006.
- Yong, Xu, Zefeng Yan, Can Wang, Chao Wang, Nan Li, and Xinyu Wu. 2019. “Ergonomic Mechanical Design and Assessment of a Waist Assist Exoskeleton for Reducing Lumbar Loads during Lifting Task.” Micromachines 10 (7): 463. doi:10.3390/mi10070463.
- Zhang, Juanjuan, Pieter Fiers, Kirby A. Witte, Rachel W. Jackson, Katherine L. Poggensee, Christopher G. Atkeson, and Steven H. Collins. 2017. “Human-in-the-Loop Optimization of Exoskeleton Assistance during Walking.” Science 356 (6344): 1280–1284. doi:10.1126/science.aal5054.