
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
Standard discontinuous Galerkin methods, based on piecewise polynomials of degree , are considered for temporal semi-discretization for second-order hyperbolic equations. The main goal of this paper is to present a simple and straightforward a priori error analysis of optimal order with minimal regularity requirement on the solution. Uniform norm in time error estimates are also proved. To this end, energy identities and stability estimates of the discrete problem are proved for a slightly more general problem. These are used to prove optimal order a priori error estimates with minimal regularity requirement on the solution. The combination with the classic continuous Galerkin finite element discretization in space variable is used to formulate a full-discrete scheme. The a priori error analysis is presented. Numerical experiments are performed to verify the theoretical results.
1. Introduction
We study a priori error analysis of the discontinuous Galerkin methods of order , dG(
), for temporal semi-discretization of the second-order hyperbolic problems
(1)
(1) where A is a self-adjoint, positive definite, uniformly elliptic second-order operator on a Hilbert space H. We then combine the dG(
) method with a standard continuous Galerkin of order
, cG(
), for spatial discretization to formulate a full discrete scheme, to be called dG(
)-cG(
).
We may consider, as a prototype equation for such second-order hyperbolic equations, with homogeneous Dirichlet boundary conditions. That is, the classical wave equation,
(2)
(2) where Ω is a bounded and convex polygonal domain in
,
, with boundary Γ. We denote
and
. The present work also applies to wave phenomena with vector-valued solution
, such as wave elasticity.
We may also consider more general equations
(3)
(3) where
. That is,
(4)
(4) Here
is a smooth function and for two positive constants
and
,
We note that
can also be a uniformly symmetric positive definite matrix.
Throughout this paper, for simplicity, we consider (Equation2(2)
(2) ), and we remark on how the approach is applied to (Equation4
(4)
(4) ), too. The results and the corresponding proofs for
are very similar to case A, and, therefore, we will omit the proofs.
The discontinuous Galerkin-type methods for time or space discretization have been studied extensively in the literature for ordinary differential equations and parabolic/hyperbolic partial differential equations; see, for example, Refs. [Citation1,Citation3–6,Citation8,Citation10,Citation13,Citation16,Citation18,Citation19,Citation21,Citation24,Citation27,Citation28] and the references therein. In particular, several discontinuous and continuous Galerkin finite element methods, both in time and space variables, for solving second-order hyperbolic equations have appeared in the literature, see, e.g. Refs. [Citation1,Citation11,Citation12,Citation14,Citation25] and the references therein.
A dG(1)-cG(1) methods was studied in Ref. [Citation14]. This was extended by the study in Ref. [Citation1], where dG time-stepping methods were applied directly to the second-order ode system that arise from spatial semi-discretization by standard cG methods. Discontinuous spatial discretization of wave problems were studied in Refs. [Citation12,Citation20,Citation25].
Uniform in time stability analysis, also so-called strong stability or -stability, has been studied for parabolic problems, [Citation9,Citation18,Citation27], but not for second-order hyperbolic problems. An important tool for such analysis of parabolic problems is the smoothing property of the solution operator, thanks to analytic semigroup. For parabolic problems, in Ref. [Citation9], uniform in time stability and error estimates for dG(
),
, have been proved using the Dunford-Taylor formula based on smoothing properties of the analytic semigroups. For parabolic problems which are perturbed by a memory term, such analysis has been done for dG(0) and dG(1), using the linearity of the basis functions in time [Citation18]. Another way to analyse uniform in time stability is using a lifting operator technique to write the dG(
) formulation in a strong (pointwise) form [Citation27].
Second-order hyperbolic problems, unfortunately, do not enjoy such smoothing properties, due to the fact that the solution operator generates a -semigroup only, but not an analytic semigroup. However, one can use the linearity of the basis function in time in case of dG(0) and dG(1) to prove such a priori error estimates, which is a part of this work.
Optimal order estimates for Galerkin finite element approximation of the wave equation were first obtained by the study in Ref. [Citation7], and the regularity requirement for the initial displacement was not minimal. This was improved in Ref. [Citation2], and in Ref. [Citation23], it was shown that the resulting regularity requirement is optimal; see [Citation15, Lemma 4.4] for more details. A new approach was introduced for a priori error analysis of the second-order hyperbolic problems in the context of continuous Galerkin methods, spatial semi-discretization cG(1) in Ref. [Citation15] and cG(1)-cG(1) in Ref. [Citation17].
Here, we extend such a priori error analysis to dG() time-stepping for
, for (Equation2
(2)
(2) ), as the chief example for (Equation1
(1)
(1) ). We also present the a priori error analysis for a full discrete scheme by combining dG(
) with a standard cG(
),
, method for spatial discretization (see also Remark 3.1). The regularity requirements on the solution are minimal, which is important, in particular, for stochastic model problems and for second-order hyperbolic partial differential equations perturbed by a memory term, see Refs. [Citation15,Citation17,Citation26]. The approach presented here is simple and straightforward such that we can prove error estimates in several space-time norms. We also show how the same approach is used to prove uniform in time error estimates. We note that the error analysis in Ref. [Citation17] is based on energy arguments, while in Ref. [Citation26], it is via duality arguments. That is, we can use the presented approach of error analysis of dG methods via duality arguments, too.
To prove a priori error estimates at the time-mesh points and also uniform in time, we prove stability estimates and energy identity, respectively, for the discrete problem of a more general form, by considering an extra (artificial) load term in the so-called displacement-velocity formulation (see Remark 4.1). This gives the flexibility to obtain optimal order a priori error estimates with minimal regularity requirement on the solution. See Remark 4.2, too. For dG methods, long-time integration without error accumulation is possible since the stability constants are independent of the length of the time interval; see also Remark 6.1.
The outline of this paper is as follows. We provide some preliminaries and the weak formulation of the model problem, in § 2. In Section 3, we formulate the dG() method, and we obtain energy identity and stability estimates for the discrete problem of a slightly more general form. Then, in § 4, we prove optimal order a priori error estimates in
and
norms for the displacement and
-norm of the velocity, with minimal regularity requirement on the solution. We also prove uniform in time a priori error estimates. In § 5, we formulate the dG(
)-cG(
) scheme and study the stability of the discrete problem, to be used to prove a priori error estimates in Section 6. Finally, numerical experiments are presented in Section 7 in order to illustrate the theory.
2. Preliminaries
We let with the inner product
and the induced norm
. Denote
with the energy inner product
and the induced norm
. Let
be defined with homogeneous Dirichlet boundary conditions on
, and
be the eigenpairs of A, i.e.
It is known that
with
and the eigenvectors
form an orthonormal basis for H. Then
and we introduce the fractional-order spaces [Citation28],
We note that
and
. Defining the new variables
and
, we can write the velocity-displacement form of (Equation2
(2)
(2) ) as
for which the weak form is to find
and
such that
(5)
(5) This equation is used for dG(
) formulation.
Remark 2.1
For in (Equation4
(4)
(4) ), with homogeneous Dirichlet boundary conditions on
, we denote by
the eigenpairs of
, i.e.
Then
with
and the eigenvectors
form an orthonormal basis for H. Having
we can introduce the fractional-order spaces
We note that
and
. If we define an energy inner product
with the induced norm
, then the norms
and
are equivalent on
, that is
We also note that the norms
and
are equivalent on
.
Then, the weak form of (Equation4(4)
(4) ) is to find
and
such that
(6)
(6) This equation then can be used for the dG(
) formulation.
3. The discontinuous Galerkin time discretization
In this section, we apply the standard dG method in time variable using piecewise polynomials of degree , and we investigate the stability.
3.1. dG( ) formulation
) formulation
Let be a temporal mesh with time subintervals
and steps
, and the maximum step-size by
. Let
and define the finite element space
for each space-time 'Slab'
.
We follow the usual convention that a function is left-continuous at each time level
and we define
, writing
The dG method determines
on
for
by setting
, and then
(7)
(7) Now, we define the function space
consisting of functions that are piecewise smooth with respect to the temporal mesh with values in
. We note that
. Then we define the bilinear form B and the linear form L on
by
(8)
(8) Then
, the solution of discrete problem (Equation7
(7)
(7) ), satisfies
(9)
(9) We note that the solution
of (Equation5
(5)
(5) ) also satisfies
(10)
(10) These imply the Galerkin orthogonality for the error
, that is,
(11)
(11) Integration by parts yields an alternative expression for the bilinear form (Equation8
(8)
(8) ), as
(12)
(12)
Remark 3.1
We note that the framework also applies to spatial finite-dimensional function spaces , such as, a continuous Galerkin finite element method of order r for discretization in space variable. One can combine a continuous Galerkin finite element method in spatial variable to get a full discrete scheme. That is the subject of Section 5.
3.2. Stability
Here, we present a stability (energy) identity and stability estimate, which are used in a priori error analysis. In our error analysis, we need a stability identity for a slightly more general problem, that is such that
(13)
(13) where the linear form
is defined on
by
That is, instead of (Equation5
(5)
(5) ), we study the stability of the dG(
) discretization of a more general problem
See Remark 4.1.
We define the following norms
and
where
.
Theorem 3.1
Let be a solution of (Equation13
(13)
(13) ). Then for any
and
, we have the energy identity
(14)
(14) Moreover, for some constant
(independent of T), we have the stability estimate
(15)
(15)
Proof.
We set for
in (Equation13
(13)
(13) ) to obtain
Now writing the first two terms at the left side as
we have
Then, using (for
)
we conclude
Hence, having
we conclude the identity
Finally, to prove the stability estimate (Equation15
(15)
(15) ), recalling that all terms on the left side of the stability identity (Equation14
(14)
(14) ) are non-negative, we have
Using Cauchy-Schwarz inequality, we obtain
that, having
, implies
(16)
(16) Now, using the fact that for piecewise constant and piecewise linear functions, i.e. for
, we have
and that the inequality (Equation16
(16)
(16) ) holds for arbitrary N, we conclude in a standard way
This concludes the stability estimate (Equation15
(15)
(15) ), and the proof is now complete.
Remark 3.2
The dG() can be applied to (Equation4
(4)
(4) ), using the weak form (Equation6
(6)
(6) ). Then stability identity and estimates, similar to (Equation14
(14)
(14) ) and (Equation15
(15)
(15) ), are obtained with norms
, the energy inner product
and the operator
, instead of
and A, respectively.
4. A priori error estimates for temporal discretization
For a given function we define the interpolation
by
(17)
(17) where the latter condition is not used for
. By standard arguments, we then have
(18)
(18) where
, see [Citation22].
First we prove a priori error estimates for the dG() approximation solution at the nodal points, for which it is enough to use the stability estimate (Equation15
(15)
(15) ). Then, for uniform in time a priori error estimates, we need to use all information about the energy in the system, that is we need to use the energy identity (Equation14
(14)
(14) ). We note that our analysis is limited to
to use the linearity property of the basis function to be able to prove uniform in time error estimates, since the semigroup is not analytic.
4.1. Estimates at the nodes
Theorem 4.1
Let and
be the solutions of (Equation9
(9)
(9) ) and (Equation10
(10)
(10) ), respectively. Then with
and for some constant
(independent of T), we have
(19)
(19)
(20)
(20)
Proof.
1. We split the error into two terms, recalling the interpolation operator in (Equation17
(17)
(17) ),
We can estimate the interpolation error η by (Equation18
(18)
(18) ), so we need to find estimates for θ. Recalling Galerkin orthogonality (Equation11
(11)
(11) ), we have
Then, using the alternative expression (Equation12
(12)
(12) ), we have
Now, by the fact that
vanishes at the time nodes and using the definition of
, it follows that
and
are zero or constants on
and hence they are orthogonal to the interpolation error. We conclude that
satisfies the equation
(21)
(21) That is, θ satisfies (Equation13
(13)
(13) ) with
and
.
2. Then applying the stability estimate (Equation15(15)
(15) ) and recalling
, we have
(22)
(22) To prove the first a priori error estimate (Equation19
(19)
(19) ), we set
. In view of
and
, we have
Now, using (Equation18
(18)
(18) ) and
, the first a priori error estimate (Equation19
(19)
(19) ) is obtained.
For the second error estimate, we choose in (Equation22
(22)
(22) ). In view of
and
, we have
Now, using (Equation18
(18)
(18) ) and by the fact that
, implies the second a priori error estimate (Equation20
(20)
(20) ).
Remark 4.1
We note that (Equation21(21)
(21) ), means that
and
in (Equation13
(13)
(13) ), which is the reason for considering an extra load term in the first equation of (Equation5
(5)
(5) ). This way, we can balance between the right operators and suitable norms to get optimal order of convergence with minimal regularity requirement on the solution. Indeed, in Ref. [Citation23], it has been proved that the minimal regularity that is required for optimal order convergence for finite element discretization of the wave equation is one extra derivative compared to the optimal order of convergence, and it cannot be relaxed. This means that the regularity requirement on the solution in our error estimates is minimal. This is in agreement with the error estimates for continuous Galerkin finite element approximation of second-order hyperbolic problems, see, e.g. Refs. [Citation15,Citation17,Citation26].
4.2. Interior estimates
Now, we prove uniform in time a priori error estimates for dG(),
, based on the linearity of the basis functions.
Theorem 4.2
Let and
be the solutions of (Equation9
(9)
(9) ) and (Equation10
(10)
(10) ), respectively. Then with
and for some constant
(independent of T), we have
(23)
(23)
(24)
(24)
Proof.
1. We split the error into two terms, recalling the interpolation operator in (Equation17
(17)
(17) ),
We can estimate η by (Equation18
(18)
(18) ), so we need to find estimates for θ. Then, similar to the first part of the proof of Theorem 4.1, we obtain the equation (Equation21
(21)
(21) ). That is, θ satisfies (Equation13
(13)
(13) ) with
and
.
2. Then, using the energy identity (Equation14(14)
(14) ) and recalling
, we can write, for
,
where, Cauchy-Schwarz inequality was used. This implies
(25)
(25) Since
, we have
Note that
and hence
(26)
(26) and in a similar way for
, we have
(27)
(27) Now, using (Equation26
(26)
(26) ) and (Equation27
(27)
(27) ) in (Equation25
(25)
(25) ) and the fact that
for some
, we have
and as a result, we obtain
that implies
(28)
(28) To prove the first a priori error estimate (Equation23
(23)
(23) ), we set l = 0. In view of
, we have
Now, using (Equation18
(18)
(18) ), we have
that, having
, the first a priori error estimate (Equation23
(23)
(23) ) is obtained.
For the second error estimate, we choose in (Equation28
(28)
(28) ). In view of
, we have
Now, using (Equation18
(18)
(18) ) and by the fact that
, it implies the second a priori error estimate (Equation24
(24)
(24) ).
Remark 4.2
We note that in the second step of the proof of Theorem 4.1 it was enough to use the stability estimate (Equation15(15)
(15) ). But for uniform in time a priori error estimates (Equation23
(23)
(23) )–(Equation24
(24)
(24) ), we need to use all information about the jump terms, and therefore we used the energy identity (Equation14
(14)
(14) ) in the second step of Theorem 4.2.
Remark 4.3
Theorem 4.1 and Theorem 4.2, recalling Remark 3.2, hold true for the dG() approximation of (Equation4
(4)
(4) ), using the corresponding norms
and
, instead of
and
, respectively.
5. Full discretization
In this section, we study full discretization of (Equation2(2)
(2) ) by combining dG(
),
in time and continuous Galerkin method of order
, cG(
) in space, to be called dG(
)-cG(
). Then, we prove a stability identity and a stability estimate of the full discrete method. We use a combination of the idea in Section 4 with a priori error analysis for continuous Galerkin finite element approximation in Ref. [Citation15]. This idea was used in the context of continuous Galerkin approximation (only cG(1)-cG(1) in time and space) of some second-order hyperbolic integro-differential equations, with applications in linear/fractional-order viscoelasticity, see [Citation17,Citation26].
5.1. dG()-cG() formulation
Let be a family of finite element spaces of continuous piecewise polynomials of degree at most
, with h denoting the maximum diameter of the elements.
To apply dG() method to formulate the full discrete dG(
)-cG(
), recalling the notation in Section 3, we let
. For each time subinterval
we denote
, and define the finite element spaces
. We note that
and therefore we use the framework in Section 3. We denote the full discrete approximate solution by
, too.
Then , the solution of dG(
)-cG(
), satisfies
(29)
(29) where
, and
and
are suitable approximations (to be chosen) of the initial data
and
in
, respectively. Here, the linear form L is defined on
by
(30)
(30) This and (Equation10
(10)
(10) ) imply, for the error
,
Therefore, using the natural choice
(31)
(31) we have the Galerkin orthogonality
(32)
(32) Here, the orthogonal projections
and
are defined, respectively, by
(33)
(33) We define
and
, such that
and
, for
. We have the following error estimates:
(34)
(34)
(35)
(35) We define the discrete linear operator
by
and
, with discrete norms
We introduce
such that
for
. We note that
.
5.2. Stability
In this section, we present a stability (energy) identity and stability estimate, that is used in a priori error analysis. Therefore, similar to §3, we need a stability identity for a slightly more general problem, that is such that
(36)
(36) where the linear form
is defined on
by
Theorem 5.1
Let be a solution of (Equation36
(36)
(36) ). Then for any
and
, we have the energy identity
(37)
(37) Moreover, for some constant
(independent of T), we have the stability estimate
(38)
(38)
Proof.
We set for
in (Equation36
(36)
(36) ) to obtain
Now, similar to the proof Theorem 3.1, the stability identity (Equation37
(37)
(37) ) and stability estimate (Equation38
(38)
(38) ) are proved.
Remark 5.1
For the model problem (Equation4(4)
(4) ), we recall Remark 2.1, and we define the orthogonal projection
by
We define
, such that
, for
, and we have the following error estimates:
We also define the discrete linear operator
by
and
, with discrete norms
We introduce
such that
for
.
Now, Theorem 5.1, recalling Remark 3.2, holds true for the dG() approximation of (Equation4
(4)
(4) ), with norms
, the energy inner product
and the operators
and
, instead of
,
and
, respectively.
6. A priori error estimates for full dicretization
Here we combine the idea in Section 4 with the approach that was used for continuous Galerkin finite element approximation for second-order hyperbolic problems in Refs. [Citation15,Citation17,Citation26]. This is an extension of a priori error analysis to dG()-cG(
) methods.
Similar to the temporal discretization in Section 4, first , we prove a priori error estimates for a general dG()-cG(
) approximation solution at the temporal nodal points, for which it is enough to use the stability estimate (Equation38
(38)
(38) ). Then, for uniform in time a priori error estimates, we use the energy identity (Equation37
(37)
(37) ). Our analysis is limited to
, such that we can use the linearity property of the basis function to prove uniform in time error estimates.
Remark 6.1
For the error analysis of continuous Galerkin time-space discretization of second-order hyperbolic problems, see, e.g. [Citation26, Remark 3.2], we need to assume that , that is, we do not change the spatial mesh or just refine the spatial mesh from one-time level to the next one. This limitation on the spatial mesh is not needed for discontinuous Galerkin approximation in time, i.e. dG(
)-cG(
).
6.1. Estimates at the nodes
Theorem 6.1
Let and
be the solutions of (Equation36
(36)
(36) ) and (Equation10
(10)
(10) ), respectively. Then with
and for some constant
(independent of T), we have
(39)
(39)
(40)
(40)
Proof.
1. We split the error as:
where
is the linear interpolation operator defined by (Equation17
(17)
(17) ), and
(to be specified) is in terms of the projectors
or
in (Equation33
(33)
(33) ).
2. To prove the first error estimate, we choose
Therefore, using
and the Galerkin orthogonality (Equation32
(32)
(32) ), we get
Then, recalling the alternative expression (Equation12
(12)
(12) ), we have
Now, using the definition of
, in (Equation17
(17)
(17) ) and the definition of ω in (Equation33
(33)
(33) ), we conclude that
satisfies the equation
Consequently, we have
(41)
(41) that is, θ satisfies (Equation36
(36)
(36) ) with
and
.
Applying the stability estimate (Equation38(38)
(38) ), and recalling (Equation31
(31)
(31) ) such that
we have
Now, setting
and having
and
, we obtain
Using the fact
and
for all
, and
, we have
In view of
and
, we get
that, using (Equation18
(18)
(18) ) and (Equation34
(34)
(34) ), we imply a priori error estimate (Equation39
(39)
(39) ).
3. Finally, to prove the error estimate (Equation40(40)
(40) ), we alter the choice as
Now, using
and the Galerkin orthogonality (Equation32
(32)
(32) ), we have
Then, similar to the previous case, using the alternative expression (Equation12
(12)
(12) ), we have
Now, by the definition of
and ω, we conclude that
satisfies the equation
(42)
(42) which is of the form (Equation36
(36)
(36) ) with
and
.
Then applying the stability estimate (Equation38(38)
(38) ), and recalling (Equation31
(31)
(31) ) such that
we have
(43)
(43) Now, we set
, and we obtain
Then, since
in view of
,
, we conclude that
This implies that the last estimate by (Equation18
(18)
(18) ) and (Equation34
(34)
(34) ). The proof is now complete.
6.2. Interior estimates
Theorem 6.2
Let and
be the solutions of (Equation36
(36)
(36) ) and (Equation10
(10)
(10) ), respectively. Then with
and for some constant
(independent of T), we have
(44)
(44)
(45)
(45)
Proof.
1. We split the error as:
where
is the linear interpolation operator defined by (Equation17
(17)
(17) ), and
(to be specified) is in terms of the projectors
or
in (Equation33
(33)
(33) ).
2. To prove the first error estimate (Equation44(44)
(44) ), we choose
Similar to the second part of the proof of Theorem 6.1, we obtain equation (Equation41
(41)
(41) ), that is, θ satisfies (Equation36
(36)
(36) ) with
and
.
Then, using the energy identity (Equation37(37)
(37) ) and recalling
we have, for
,
where Cauchy-Schwarz inequality was used. That implies
(46)
(46) Since
, we have
Note that
and hence
(47)
(47) and in a similar way for
, we have
(48)
(48) Now, using (Equation47
(47)
(47) ) and (Equation48
(48)
(48) ) in (Equation46
(46)
(46) ) and the fact that
for some
, we have
and as a result, we obtain
that implies
Now, setting l = 0 and having
and
, we obtain
Using the fact that
,
and
, for all
, and
, we get
In view of
, we have
Now, using (Equation18
(18)
(18) ) and (Equation34
(34)
(34) ) we conclude a priori error estimate (Equation44
(44)
(44) ).
3. To prove the second error estimate (Equation45(45)
(45) ), we choose
Then, similar to the third part of the proof of Theorem 6.1, we obtain the equation (Equation42
(42)
(42) ), that is, θ satisfies (Equation36
(36)
(36) ) with
and
.
Then using the energy identity (Equation37(37)
(37) ) and recalling
, we get
Now, we set l = −1, and we obtain
Then since
In view of
, we have
Now, using (Equation18
(18)
(18) ) and (Equation34
(34)
(34) ) a priori error estimate (Equation45
(45)
(45) ) is obtained.
Remark 6.2
Theorem 6.1 and Theorem 6.2, recalling Remark 5.1, hold true for the dG()-cG(
) approximation of (Equation4
(4)
(4) ), using the corresponding norms
and
, instead of
and
, respectively.
7. Numerical example
In this section, we illustrate the temporal rate of convergence for dG(0)-cG(1) and dG(1)-cG(1), based on the uniform in time error estimates, by a simple example. We also present the pointwise (in time) error estimates and the discrete energy.
7.1. System of linear equations for dG(0) and dG(1) time-stepping
For the piecewise constant case, dG(0), we have the system of linear equations, for ,
where A and M are the stiffness and mass matrices, respectively, and
is the load vector.
For the piecewise linear case, dG(1), we define ,
and use the representation, for i = 1, 2,
Then, the system of linear equations, for
, is
where
, and
are the load vectors with components
.
7.2. Example
We consider (Equation2(2)
(2) ) in one dimension with homogeneous Dirichlet boundary condition, the source term
, and the initial conditions
and
, for which the exact solution is
,
.
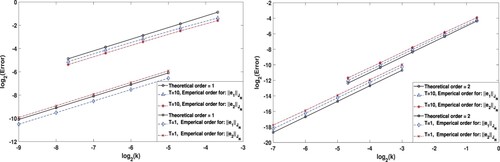
Figure shows the optimal rate of convergence for dG(0)-cG(1) and dG(1)-cG(1) with uniform in time -norm for the displacement and the velocity, that is in agreement with (Equation44
(44)
(44) ) and (Equation45
(45)
(45) ). We have used short time T = 1 and long time T = 10. The figures for the error estimates (Equation39
(39)
(39) ) and (Equation40
(40)
(40) ) are very similar, as expected, and therefore they are not presented here.
Figure 1. Temporal rate of convergence with uniform in time -norm for the displacement and the velocity, with T = 1, 10: (left) dG(0) (right) dG(1).
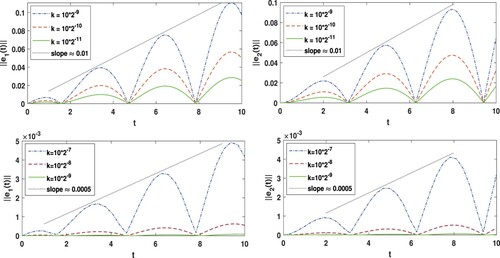
The behaviour of the errors and
in time are shown in Figure for both dG(0) and dG(1), with T = 10. We note that the slope of error accumulation is very small, in particular, for dG(1) in compare with the finest time mesh
. This shows that the error accumulation does not depend on time T in long-time integration, since the stability constants are independent of T.
Figure 2. Behaviour of the errors and
in time: (up) dG(0) (down) dG(1).
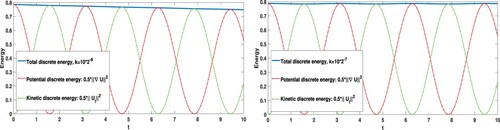
The total energy of the system is . The discrete energy (for three different time steps) has been compared with the theoretical energy in Figure , for both methods dG(0) and dG(1). In Figure , we show the discrete energy for dG(0) with the time step
, and for dG(1) with even a bigger time step
. In all experiments dG(1) outperforms dG(0). It is shown that dG(1) is much more accurate even with a considerably larger time step.
Figure 3. Comparison of the theoretical (continuous) energy and the discrete energy for different values of the time step k: (left) dG(0) (right) dG(1).
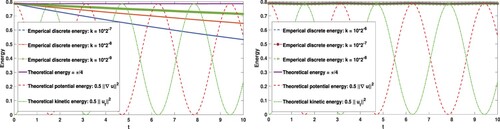
Figure 4. Discrete energy: (left) dG(0) with (right) dG(1) with
.
Acknowledgments
The authors would like to thank the anonymous referee for the constructive comments that helped us to improve the manuscript. The authors also thank Prof. Omar Lakkis for fruitful discussion and his constructive comments.
Disclosure statement
No potential conflict of interest was reported by the author(s).
References
- S. Adjerid and H. Temimi, A discontinuous Galerkin method for the wave equation, Comput. Methods Appl. Mech. Eng. 200 (2011), pp. 837–849.
- G.A. Baker, Error estimates for finite element methods for second order hyperbolic equations, SIAM J. Numer. Anal. 13 (1976), pp. 564–576.
- L. Banjai, E.H. Georgoulis, and O. Lijoka, A Trefftz polynomial space-time discontinuous Galerkin method for the second order wave equation, SIAM J. Numer. Anal. 55 (2017), pp. 63–86.
- P. Castillo, A superconvergence result for discontinuous Galerkin methods applied to elliptic problems, Comput. Methods Appl. Mech. Eng. 192 (2003), pp. 4675–4685.
- F. Celiker and B. Cockburn, Superconvergence of the numerical traces for discontinuous Galerkin and hybridized methods for convection-diffusion problems in one space dimension, Math. Comput. 76 (2007), pp. 67–96.
- M. Delfour, W. Hager, and F. Trochu, Discontinuous Galerkin methods for ordinary differential equations, Math. Comp. 36 (1981), pp. 455–473.
- T. Dupont, L2-estimates for Galerkin methods for second order hyperbolic equations, SIAM J. Numer. Anal. 10 (1973), pp. 880–889.
- K. Eriksson and C. Johnson, Adaptive finite element methods for parabolic problems I: A linear model problem, SIAM J. Numer. Anal. 28 (1991), pp. 43–77.
- K. Eriksson, C. Johnson, and S. Larsson, Adaptive finite element methods for parabolic problems IV: analytic semigroups, SIAM J. Numer. Anal. 35 (1998), pp. 1315–1325.
- K. Eriksson, C. Johnson, and V. Thomée, Time discretization of parabolic problems by the discontinuous Galerkin method, RAIRO Modél. Math. Anal. Numér. 19 (1985), pp. 611–643.
- D.A. French and T.E. Peterson, A continuous space-time finite element method for the wave equation, Math. Comput. 65 (1996), pp. 491–506.
- M.J. Grote, A. Schneebeli, and D. Schötzau, Discontinuous Galerkin finite element method for the wave equation, SIAM J. Numer. Anal. 6 (2006), pp. 2408–2431.
- C. Johnson, Error estimates and adaptive time-step control for a class of one-step methods for stiff ordinary differential equations, SIAM J. Numer. Anal. 25 (1988), pp. 908–926.
- C. Johnson, Discontinuous finite element for second-order hyperbolic problems, Comput. Methods Appl. Mech. Eng. 107 (1993), pp. 117–129.
- M. Kovács, S. Larsson, and F. Saedpanah, Finite element approximation for the linear stochastic wave equation with additive noise, SIAM J. Numer. Anal. 48 (2010), pp. 408–427.
- S. Larsson, M. Racheva, and F. Saedpanah, Discontinuous Galerkin method for an integro-differential equation modeling dynamic fractional order viscoelasticity, Comput. Methods Appl. Mech. Eng. 283 (2015), pp. 196–209.
- S. Larsson and F. Saedpanah, The continuous Galerkin method for an integro-differential equation modeling dynamic fractional order viscoelasticity, IMA J. Numer. Anal. 30 (2010), pp. 964–986.
- S. Larsson, V. Thomée, and L.B. Wahlbin, Numerical solution of parabolic integro-differential equations by the discontinuous Galerkin method, Math. Comp. 67 (1998), pp. 45–71.
- P. Lasaint and P.A. Raviart, On a finite element method for solving the neutron transport equation, in Mathematical Aspects of Finite Elements in Partial Differential Equations, Academic Press, New York, 1974, pp. 89–123.
- F. Müller, D. Schötzau, and Ch. Schwab, Discontinuous Galerkin methods for acoustic wave propagation in polygons, J. Sci. Comput. 77 (2018), pp. 1909–1935.
- K. Mustapha and W. Mclean, Discontinuous Galerkin method for an evolution equation with a memory term of positive type, Math. Comput. 78 (2009), pp. 1975–1995.
- A. Quarteroni and A. Valli, Numerical Approximation of Partial Differential Equations, Springer-Verlag, Berlin and Heidelberg, 1994.
- J. Rauch, On convergence of the finite element method for the wave equation, SIAM J. Numer. Anal.22 (1985), pp. 245–249.
- W. Reed and T. Hill, Triangular Mesh Methods for the Neutron Transport Equation, Technical Report LA- UR-73-479, Los Alamos Scientific Laboratory, Los Alamos, NM, 1973.
- B. Riviere and M. Wheeler, Discontinuous finite element methods for acoustic and elastic wave problems, Contemp. Math. 329 (2003), pp. 271–282.
- F. Saedpanah, Continuous Galerkin finite element methods for hyperbolic integro-differential equations, IMA J. Numer. Anal. 35 (2015), pp. 885–908.
- L. Schmutz and T.P. Wihler, The variable-order discontinuous Galerkin time stepping scheme for parabolic evolution problems is uniformly L∞-stable, SIAM J. Numer. Anal. 57 (2019), pp. 293–319.
- V. Thomée, Galerkin Finite Element Methods for Parabolic Problems, Springer- Verlag, Berlin, 2006.