
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
In this paper, a class of E-differentiable multiobjective programming with multiple objective functions and with both inequality and equality constraints is considered. The so-called E-Karush–Kuhn–Tucker necessary optimality conditions for a (weak LS-Pareto) LS-Pareto solution are established for the considered E-differentiable vector optimization problem with the multiple interval-valued objective functions. Also several sufficient optimality conditions for both LU and LS order relations are derived for such interval-valued vector optimization problems under (generalized) E-invexity hypotheses.
1. Introduction
In mathematical programming, the coefficients of problems are assumed to be fixed in value. However, there are many situations where this assumption is not valid because of unconfirmed environments. In such cases, the decision-making methods which solve extremum problems with uncertainty are needed. The interval analysis provides strict enclosures of the solution to a mathematical model. In this way, we can at least know for sure what a mathematical model tells us, and, from that, we might determine whether it properly represent reality. Optimization problems using inexact data are strongly connected to interval-valued optimization problems. In recent years, interval-valued optimization problems have been studied by many researchers in several directions (see, e.g., [Citation6,Citation7,Citation9–11,Citation13–20,Citation24–28,Citation31], and others).
Wu [Citation30–33] derived the KKT conditions for optimization problems with interval-valued objective functions. Sun and Wang [Citation29] gave the concept of an LU-optimal solution to nondifferentiable optimization problems with the interval-valued objective function and constraint crisp functions. Zhang et al. [Citation35] extended the concepts of invexity and preinvexity to interval-valued functions and established the KKT conditions for a class of optimization problems with an interval-valued objective function. Jayswal et al. [Citation12] established sufficient conditions for KKT optimality conditions for a feasible solution to be an LU-optimal solution under invexity hypotheses.
Youness [Citation34] introduced the concepts of E-convex sets and E-convex functions. Megahed et al. [Citation23] presented the concept of an E-differentiable function which transforms a (not necessarily) differentiable function to a differentiable function based on the effect of an operator . Antczak and Abdulaleem [Citation4] established the so-called E-optimality conditions for the E-differentiable E-convex vector optimization problem with the multiple interval-valued objective functions with both inequality and equality constraints. Abdulaleem [Citation3] extended the aforesaid results for a new class of not necessarily differentiable multicriteria optimization problems, namely for E-differentiable multiobjective programming problems involving E-type I functions.
In this paper, the class of E-differentiable E-invex multiobjective programming problem with the multiple interval-valued objective functions and with both inequality and equality constraints is considered. Based on the LU and LS order relations, we define various concepts of Pareto optimality for the considered interval-valued multiobjective programming problems. For this interval-valued multiobjective programming problem, we derive Karush–Kuhn–Tucker necessary optimality conditions for a weak LS-E-Pareto solution for the considered E-differentiable vector optimization problem with the multiple interval-valued objective functions. Further, we establish several sufficient optimality conditions of Karush–Kuhn–Tucker type for a class of E-differentiable interval-valued programming problems with (generalized) E-invexity functions.
2. Preliminaries
Let be the n-dimensional Euclidean space and
be its nonnegative orthant. The following convention for equalities and inequalities will be used in the paper.
For any vectors and
in
, we define:
x = y if and only if
for all
x>y if and only if
We denote by , the family of all bounded closed intervals in
, i.e.
where the width of the interval is b−a.
If , then we adopt the notation
, where
and
mean the lower and upper bounds of A, respectively. In other words, if
, then
. If
, then
is a real number.
Let ,
. Then, by definition, we have
(1)
(1)
(2)
(2) From (Equation1
(1)
(1) ) and (Equation2
(2)
(2) ), we have
and
.
In interval mathematics, an order relation is often used to rank interval numbers and it implies that an interval number is better than another but not that one is larger than another.
Definition 2.1
Let and
be two sets in
.
For , the width (spread) of A is defined by
. We propose the order relation between A and B by considering the maximization and minimization problems separately:
For maximization, we write
For minimization, we write
In this paper, we consider only the minimization problem. In this sense, we also write if and only if
and
. Equivalently,
if and only if
(4)
(4)
Proposition 2.2
Let A and B be two sets in . If
, then
.
Proof.
Since A and B are two sets in such that
, then
and
, that is,
and
. Thus
. Therefore,
.
It should be noted that the converse of Proposition 2.2 is not true. For example, if we consider and
, then
, but
.
Now, we give the definition of an E-invex set introduced by Abdulaleem [Citation1].
Definition 2.3
A set is said to be E-invex with respect to an operator
if and only if there exists a vector-valued function
such that the relation
holds for all
and
.
Definition 2.4
Let M be an open set in . A function
is called an interval-valued function if
with
such that
for each
.
Definition 2.5
Let M be an open set in . An interval-valued function
with
is called weakly differentiable at x if the real-valued functions
and
are differentiable at x (in the usual sense).
Now, we give the definition of E-differentiability to the case of an interval-valued function given by Antczak and Abdulaleem [Citation5].
Definition 2.6
Let ,
and
. It is said that f is weakly E-differentiable at
if and only if
and
are differentiable at
(in the usual sense), that is,
(5)
(5)
(6)
(6) where
,
as
.
Definition 2.7
Let ,
and
. It is said that f is weakly E-differentiable at
if and only if
and
are differentiable at
(in the usual sense), that is,
(7)
(7)
(8)
(8) where
,
as
.
The definition of an E-differentiable E-invex function was introduced by Abdulaleem [Citation1]. Now, for convenience, we recall this definition.
Definition 2.8
Let and
be E-differentiable at
. If there exists a vector-valued function
such that the inequality
(9)
(9) holds for all
, then f is said to be an E-differentiable E-invex function at
on
with respect to η. If (Equation9
(9)
(9) ) is fulfilled for all
, then f is said to be an E-differentiable E-invex function on
with respect to η. If (Equation9
(9)
(9) ) is fulfilled for all
, where M is an E-invex set with respect to η, then f is said to be an E-differentiable E-invex function on M with respect to η.
Now, we extend the definition of an E-invex function to the case of weakly E-differentiable interval-valued functions.
Definition 2.9
Let and
be a weakly E-differentiable interval-valued function at
. If there exists a vector-valued function
such that the inequalities
(10)
(10)
(11)
(11) hold for all
, then f is said to be LU-E-invex at
on
with respect to η. If (Equation10
(10)
(10) ) and (Equation11
(11)
(11) ) are fulfilled for all
, then f is said to be LU-E-invex on
with respect to η. If (Equation10
(10)
(10) ) and (Equation11
(11)
(11) ) are fulfilled for all
, then f is said to be LU-E-invex on M with respect to η.
Definition 2.10
Let and
be a weakly E-differentiable interval-valued function at
. If there exists a vector-valued function
such that the inequalities
(12)
(12)
(13)
(13) hold for all
, then f is said to be LS-E-invex at
on
with respect to η. If (Equation12
(12)
(12) ) and (Equation13
(13)
(13) ) are fulfilled for all
, then f is said to be LS-E-invex on
with respect to η. If (Equation12
(12)
(12) ) and (Equation13
(13)
(13) ) are fulfilled for all
, then f is said to be LS-E-invex on M with respect to η.
Proposition 2.11
Let and
be a weakly E-differentiable interval-valued function at
. Then we have following properties:
| (i) | f is LU-E-invex at | ||||
| (ii) | f is LS-E-invex at | ||||
| (iii) | If f is LS-E-invex at | ||||
Proof.
The proof of (i), (ii) follows directly from Definitions 2.9 and 2.10 and (iii) follows directly from Proposition 2.2.
Now, we give an example of such an LU-E-invex function which is not LS-E-invex.
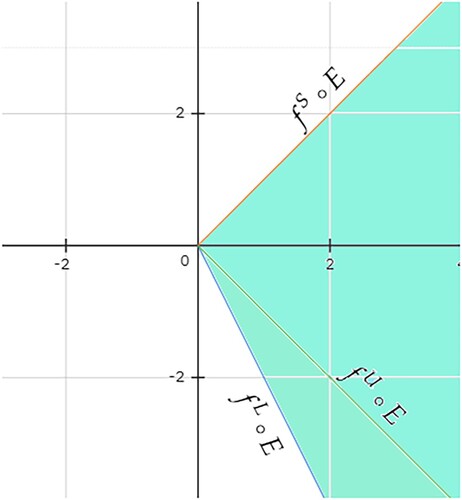
Example 2.12
Let ,
be a weakly E-differentiable interval-valued function on
defined by
From above we have
and
, therefore
. Then, by Definition 2.9, f is LU-E-invex on
with respect to η given above, while f is not LS-E-invex on
with respect to η given above, because for x = 1 and
, we have
Hence, by Definition 2.10, f is not LS-E-invex on
with respect to η given above (see Figure ).
Figure 1. Graphical view of in Example 2.12.
Definition 2.13
Let and
be a weakly E-differentiable interval-valued function at
. If there exists a vector-valued function
such that the inequalities
(14)
(14)
(15)
(15) hold for all
, then f is said to be strictly LU-E-invex at
on
with respect to η. If (Equation14
(14)
(14) ) and (Equation15
(15)
(15) ) are fulfilled for all
, then f is said to be strictly LU-E-invex on
with respect to η. If (Equation14
(14)
(14) ) and (Equation15
(15)
(15) ) are fulfilled for all
, then f is said to be strictly LU-E-invex on M with respect to η.
Definition 2.14
Let and
be a weakly E-differentiable interval-valued function at
. If there exists a vector-valued function
such that the inequalities
(16)
(16)
(17)
(17) hold for all
, then f is said to be strictly LS-E-invex at
on
with respect to η. If (Equation16
(16)
(16) ) and (Equation17
(17)
(17) ) are fulfilled for all
, then f is said to be strictly LS-E-invex on
with respect to η. If (Equation16
(16)
(16) ) and (Equation17
(17)
(17) ) are fulfilled for all
, then f is said to be strictly LS-E-invex on M with respect to η.
Now, we prove a sufficient condition for an E-differentiable interval-valued function to be E-invex.
Theorem 2.15
Let and
be a weakly E-differentiable interval-valued function at
with respect to the vector-valued function
such that the inequalities
(18)
(18)
(19)
(19) hold for any
. Then, f is a weakly E-differentiable LU-E-invex interval-valued function with respect to η.
Proof.
By (Equation18(18)
(18) ) and (Equation19
(19)
(19) ), we have that the inequalities
(20)
(20)
(21)
(21) hold for any
. Thus the above inequalities yields for any
,
(22)
(22)
(23)
(23) By assumption, f is weakly E-differentiable at
. Hence, by Definition 2.6, it follows that
is differentiable at
. Therefore, letting
, we obtain the inequalities (Equation10
(10)
(10) ) and (Equation11
(11)
(11) ).
Example 2.16
Let ,
be a weakly E-differentiable interval-valued function on
defined by
Note that f is not an E-differentiable E-convex interval-valued function as can be seen by taking
,
, since the inequalities
(24)
(24)
(25)
(25) hold. Hence, by the definition of an E-differentiable E-convex interval-valued function introduced by Antczak and Abdulaleem [Citation5], it follows that f is not an E-differentiable E-convex interval-valued function. However, the function f is an LU-E-invex function with respect to
Now, we extend the concepts of generalized E-invexity introduced by Abdulaleem [Citation1] for E-differentiable functions to the case of a weakly E-differentiable interval-valued function.
Definition 2.17
Let and
be a weakly E-differentiable interval-valued function at
. If there exists a vector-valued function
such that the following relations
(26)
(26)
(27)
(27) hold for all
, then f is said to be pseudo LU-E-invex at
on
with respect to η. If (Equation26
(26)
(26) ) and (Equation27
(27)
(27) ) are fulfilled for all
, then f is said to be pseudo LU-E-invex on
with respect to η. If (Equation26
(26)
(26) ) and (Equation27
(27)
(27) ) are fulfilled for all
, then f is said to be pseudo LU-E-invex on M with respect to η.
Definition 2.18
Let and
be a weakly E-differentiable interval-valued function at
. If there exists a vector-valued function
such that the following relations:
(28)
(28)
(29)
(29) hold for all
, then f is said to be pseudo LS-E-invex at
on
with respect to η. If (Equation28
(28)
(28) ) and (Equation29
(29)
(29) ) are fulfilled for all
, then f is said to be pseudo LS-E-invex on
with respect to η. If (Equation28
(28)
(28) ) and (Equation29
(29)
(29) ) are fulfilled for all
, then f is said to be pseudo LS-E-invex on M with respect to η.
Definition 2.19
Let and
be a weakly E-differentiable interval-valued function at
. If there exists a vector-valued function
such that the following relations:
(30)
(30)
(31)
(31) hold for all
, then f is said to be strictly pseudo LU-E-invex at
on
with respect to η. If (Equation30
(30)
(30) ) and (Equation31
(31)
(31) ) are fulfilled for all
, then f is said to be strictly pseudo LU-E-invex on
with respect to η. If (Equation30
(30)
(30) ) and (Equation31
(31)
(31) ) are fulfilled for all
, then f is said to be strictly pseudo LU-E-invex on M with respect to η.
Definition 2.20
Let and
be a weakly E-differentiable interval-valued function at
. If there exists a vector-valued function
such that the following relations:
(32)
(32)
(33)
(33) hold for all
, then f is said to be quasi LU-E-invex at
on
with respect to η. If (Equation32
(32)
(32) ) and (Equation33
(33)
(33) ) are fulfilled for all
, then f is said to be quasi LU-E-invex on
with respect to η. If (Equation32
(32)
(32) ) and (Equation33
(33)
(33) ) are fulfilled for all
, then f is said to be quasi LU-E-invex on M with respect to η.
Definition 2.21
Let and
be a weakly E-differentiable interval-valued function at
. If there exists a vector-valued function
such that the following relations:
(34)
(34)
(35)
(35) hold for all
, then f is said to be quasi LS-E-invex at
on
with respect to η. If (Equation34
(34)
(34) ) and (Equation35
(35)
(35) ) are fulfilled for all
, then f is said to be quasi LS-E-invex on
with respect to η. If (Equation34
(34)
(34) ) and (Equation35
(35)
(35) ) are fulfilled for all
, then f is said to be quasi LS-E-invex on M with respect to η.
Now, we present an example of such a weakly E-differentiable quasi LU-E-invex interval-valued function which is not LU-E-invex interval-valued function.
Example 2.22
Let ,
be a weakly E-differentiable interval-valued function on R defined by
Note that f is not an LU-E-invex function with respect to
as can be seen by taking x = 2,
, since the inequalities
hold. Hence, f is not an LU-E-invex function on R. However, f is a quasi LU-E-invex function on R. It can be shown that
,
are E-differentiable quasi LU-E-invex on R. Assume that
. We have
. This inequality implies that
. Hence, we have
. Further, assume that
. We have
. This inequality implies that
. Hence, we have
. Therefore, by Definition 2.21, f is quasi LU-E-invex on R.
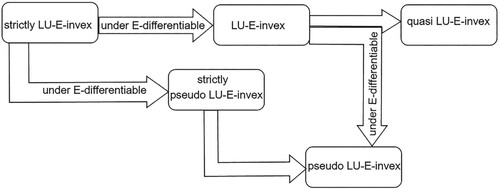
Note that every strictly pseudo E-invex interval-valued function is pseudo E-invex interval-valued function and every weakly E-differentiable pseudo E-convex interval-valued function is pseudo E-invex interval-valued function. Also, every pseudo E-convex interval-valued function is E-invex interval-valued function and every E-invex interval-valued function is pseudo E-invex interval-valued function for the same function η. Further, weakly E-differentiable quasi E-convex interval-valued function is trivially quasi E-invex interval-valued function and every pseudo E-invex interval-valued function is quasi E-invex interval-valued function, but the converse is not true (see Figure ).
Figure 2. Relationships between E-differentiable LU-E-invexity and different types of E-differentiable generalized LU-E-invexity.
3. E-differentiable interval-valued optimization problems
In the paper, consider the following (not necessarily differentiable) interval-valued multiobjective programming problem with both inequality and equality constraints:
where each
,
, is an interval-valued function defined on
, that is,
, and, moreover, each function
,
and each function
,
, are real-valued functions defined on
.
For the purpose of simplifying our presentation, we will next introduce some notations which will be used frequently throughout this paper. We will write and
for convenience. Let
be the set of all feasible solutions of (IVP).
Definition 3.1
[Citation32]
Let be a feasible solution of (IVP). We say that
is
a weak LU-Pareto (weakly LU-efficient) solution of (IVP) if and only if there exists no other feasible point
a LU-Pareto (LU-efficient) solution of (IVP) if and only if there exists no other feasible point
Definition 3.2
[Citation8]
Let be a feasible solution of (IVP). We say that
is
a weak LS-Pareto (weakly LS-efficient) solution of (IVP) if and only if there exists no other feasible point
an LS-Pareto (LS-efficient) solution of (IVP) if and only if there exists no other feasible point
Remark 3.1
[Citation32]
Let us denote by and
the set of LU-Pareto optimal solutions and weakly LU-Pareto optimal solutions, respectively. Then
.
Remark 3.2
[Citation27]
Let us denote by and
the set of LS-Pareto optimal solutions and weakly LS-Pareto optimal solutions, respectively. Then
.
Further, let be a given one-to-one and onto operator. Throughout the paper, we shall assume that the functions constituting the problem (IVP) are weakly E-differentiable. Therefore, for the considered interval-valued multiobjective programming problem (IVP), we construct the following associated vector optimization problem (IVP
) with the multiple interval-valued objective function:
where the functions
,
,
,
,
,
, are defined in the similar way as for (IVP). We call (IVP
) the E-vector optimization problem with the multiple interval-valued objective function or the interval-valued E-vector optimization problem. Let
be the set of all feasible solutions of (IVP
), that is,
Definition 3.3
[Citation5]
Let be a feasible solution of (IVP
). We say that
is
a weak LU-E-Pareto (weakly LU-E-efficient) solution of (IVP) if and only if there is no other feasible solution
a LU-E-Pareto (LU-E-efficient) solution of (IVP) if and only if there is no other feasible solution
Definition 3.4
Let be a feasible solution of (IVP
). We say that
is
a weak LS-E-Pareto (weakly LS-E-efficient) solution of (IVP) if and only if there is no other feasible solution
a LS-E-Pareto (LS-E-efficient) solution of (IVP) if and only if there is no other feasible solution
Lemma 3.5
[Citation4]
Let be an one-to-one and onto operator. Then
.
Remark 3.3
Let us denote by and
the set of LU-E-Pareto optimal solutions and weakly LU-E-Pareto optimal solutions, respectively. Then
.
Remark 3.4
Let us denote by and
the set of LS-E-Pareto optimal solutions and weakly LS-E-Pareto optimal solutions, respectively. Then
.
Theorem 3.6
Let be a one-to-one and onto operator and
be a feasible set of (IVP
). Then
| (i) |
| ||||
| (ii) |
| ||||
Proof.
Let be the feasible of (IVP
).
Assume that
Assume that
Lemma 3.7
[Citation5]
Let be a one-to-one and onto operator and let
be a weak LU-Pareto solution (a LU-Pareto solution) of the interval-valued problem (IVP
). Then
is a weak LU-Pareto solution (an LU-Pareto solution) of the problem (IVP).
Now, we prove the relationship between (weak) LS-Pareto optimal solutions in both interval-valued vector optimization problems (IVP) and (IVP).
Lemma 3.8
Let be a one-to-one and onto operator and
be a weak LS-Pareto solution (an LS-Pareto solution) of the problem (IVP). Then, there exists
such that
and
is a weak LS-Pareto solution (an LS-Pareto solution) of the problem (IVP
).
Proof.
Let be a weak LS-Pareto solution for (IVP). Moreover,
is assumed to be a one-to-one and onto operator. Hence, by Lemma 3.5, there exists
such that
. Now, we prove that
is a weak LS-Pareto solution of the problem (IVP
). By means of contradiction, suppose that
is not a weak LS-Pareto solution of the problem (IVP
). Then, by the definition of a weak LS-Pareto solution, there exists
such that
. Hence, by the definition of the relation
, it follows that, for any
,
By Lemma 3.5, we have that there exists
such that
. Taking also that
, the above inequalities yield, respectively,
(36)
(36) Hence, by the definition of the relation
, inequalities (Equation36
(36)
(36) ) imply that the inequality
is fulfilled, which is a contradiction to weakly LS-efficiency of
for the problem (IVP). The proof for the case, in which
is an LS-Pareto solution of the problem (IVP), is analogous and, therefore, it is omitted.
Lemma 3.9
Let be a one-to-one and onto operator and let
be a weak LS-Pareto solution (a LS-Pareto solution) of the interval-valued problem (IVP
). Then
is a weak LS-Pareto solution (an LS-Pareto solution) of the problem (IVP).
Proof.
Assume that is a weak LS-Pareto solution of the problem (IVP
). Note that, by Lemma 3.5,
. We proceed by contradiction. Suppose, contrary to the result, that
is not a weak LS-Pareto solution of the problem (IVP). Then, by Definition 3.1(i), there exists
such that
for each
. Hence, by Lemma 3.5, there exists
such that
. Thus, the inequality above implies that
for each
, which is a contradiction to weakly LS-efficiency of
for the problem (VP
). The proof when it is assumed that
is an LS-Pareto solution of the problem (VP
) is similar and, therefore, it is omitted.
Theorem 3.10
Let and
be a feasible solution of (IVP
). If
be a weak LU-Pareto solution (an LU-Pareto solution) of the problem (IVP
), then
is a weak LS-Pareto solution ( an LS-Pareto solution) of the problem (IVP
).
Proof.
Suppose that is not a weak LS-Pareto solution (an LS-Pareto solution) of the problem (IVP
). Then there exists
such that
for each
(
). From Proposition 2.2, we have that
for each
(
) which is a contradiction with the hypothesis of the theorem.
Theorem 3.11
[Citation5]
Let be a weak LU-Pareto solution of the (IVP
) (and, thus,
be a weak LU-E-Pareto solution of the problem (IVP)). Further, assume that the E-Kuhn–Tucker constraint qualification introduced by Antczak and Abdulaleem [Citation5] is satisfied at
. Then there exist
,
,
and
such that
(37)
(37)
(38)
(38)
(39)
(39)
Definition 3.12
[Citation21]
Let . It is said that
is a convergence vector for Y at
if there exist a sequence
in Y and a sequence
of strictly positive real numbers such that
Theorem 3.13
Let ,
and
. If
is a weak LS-Pareto solution for
on
(and, thus,
is a weak LS-E-Pareto solution for f on Ω), then no a convergence vector for
at
is strictly negative.
Proof.
is a weak LS-Pareto solution for
on
(and, thus,
is a weak LS-E-Pareto solution for f on Ω). Hence,
is a weak LS-Pareto solution for the set
. Let
be a convergence vector for
at
. Further, let
be the corresponding sequence converging to
. Consider a sequence
, that is,
such that
and
for any integer. This means that
and
for any integer. Since f is weakly E-differentiable at
, by Definitions 2.5 and 2.7, we have that the functions
and
are E-differentiable at
. By the differentiability of
and
at
, it follows that
and
are continuous at
. Thus the sequence
is convergent to
, which means that the sequences
and
are convergent to
and
, respectively. By means of contradiction, suppose that there exists a convergence vector
for
at
, which is a strictly negative. Then, by Definition 3.12, it follows that, for the sequence
,
, there exists a sequence of strictly positive real numbers
converging to 0 such that
(40)
(40) Since
for any integer and
, gives
(41)
(41) Using
,
and
, (Equation41
(41)
(41) ) yields
(42)
(42)
(43)
(43) By assumption,
. Hence, (Equation42
(42)
(42) )–(Equation43
(43)
(43) ) imply, respectively,
(44)
(44)
(45)
(45) Since
is a sequence of strictly positive real numbers for any integer, for each
, there exist
and
such that
(46)
(46)
(47)
(47) By Definition 2.4, it follows that
(48)
(48)
(49)
(49) Combining (Equation47
(47)
(47) ), (Equation48
(48)
(48) ) and (Equation49
(49)
(49) ), we get
(50)
(50)
(51)
(51) Let
. Then, (Equation50
(50)
(50) ) and (Equation51
(51)
(51) ) imply, respectively,
where
. This is a contradiction (for any sufficiently large j) to the assumption that
is a weak LS-Pareto solution for
on
and, thus,
is a weak LS-E-Pareto solution for f on Ω. Thus the proof of this theorem is completed.
Theorem 3.14
E-Karush–Kuhn–Tucker (E-KKT) necessary optimality conditions
Let be a weak LS-Pareto solution of the problem (IVP
) (and, thus,
be a weak LS-E-Pareto solution of the problem (IVP)). Further, assume that the E-Guignard constraint qualification (GCQ
) introduced by Abdulaleem [Citation2] is satisfied at
. Then there exist
,
,
and
such that
(52)
(52)
(53)
(53)
(54)
(54)
Proof.
Let be a weak LS-Pareto solution of the problem (IVP
). Hence, by Lemma 3.7,
is a (weak) LS-E-Pareto solution of the problem (IVP). Further, assume that the E-Guignard constraint qualification (GCQ
) introduced by Abdulaleem [Citation2] is satisfied at
. Therefore,
is a weak LS-Pareto solution for the set
. Let
be a convergence vector for the set
at
. Further, let
,
be the corresponding sequences, where
is a sequence of strictly positive real numbers. Then, we consider the sequences
and
such that
and
. By assumption,
is weakly E-differentiable at
. Thus, by Definition 2.7, it follows that
and
are differentiable at
. Hence, they are continuous at
. Then, by the continuity of
and
at
, the sequences
and
are convergent to
and
, respectively. By Definition 2.7, we have
(55)
(55)
(56)
(56) where
,
, when
Then, we have
(57)
(57)
(58)
(58) By (Equation57
(57)
(57) ), (Equation58
(58)
(58) ) and Definition 3.12, we conclude that the vectors
and
defined by
are convergence vectors for
and
, respectively. By the constraint qualification, it follows that
is a convergence for the set
if and only if d is a solution to the following system:
(59)
(59)
(60)
(60) Since
be a weak LS-Pareto solution of the problem (IVP
) and, thus,
is a (weak) LS-E-Pareto solution of the problem (IVP), by Theorem 3.13, we have that there is no a strictly negative convergence vector for the set
at
. Therefore, the system
(61)
(61)
(62)
(62)
(63)
(63) has no a solution
. Therefore, by Motzkin's theorem of the alternative introduced by Mangasarian [Citation22], there exist
,
,
,
,
, and
such that
(64)
(64) If we set
for all
, then (Equation64
(64)
(64) ) implies (Equation52
(52)
(52) ). Further, note that also the complementary slackness condition (Equation53
(53)
(53) ) is satisfied. Indeed, if
, then
and
. Hence, the proof of this theorem is completed.
Definition 3.15
The point is said to be an Karush–Kuhn–Tucker point (KKT point) for the E-vector optimization problem (IVP
) with the multiple interval-valued objective if the Karush–Kuhn–Tucker necessary optimality conditions (Equation37
(37)
(37) )–(Equation39
(39)
(39) ) (the Karush–Kuhn–Tucker necessary optimality conditions (Equation52
(52)
(52) )–(Equation54
(54)
(54) )) are satisfied at
with
,
, and
.
Now, we prove the sufficiency of the E-KKT necessary optimality conditions for E-differentiable interval-valued vector optimization problem (IVP) under E-invexity hypotheses.
Theorem 3.16
Let be a KKT point of the problem (IVP
). Let
and
. Furthermore, assume that the following hypotheses are fulfilled:
| (a) | the objective function f is LU-E-invex with respect to η at | ||||
| (b) | each function | ||||
| (c) | each function | ||||
| (d) | each function | ||||
Then is an LU-Pareto solution of the problem (IVP
) and, thus,
is an LU-E-Pareto solution of the problem (IVP).
Proof.
By assumption, is a KKT point of the problem (IVP
). Then, by Definition 3.15, the E-KKT necessary optimality conditions (Equation37
(37)
(37) )–(Equation39
(39)
(39) ) are satisfied at
with
,
, and
. We proceed by contradiction. Suppose, contrary to the result, that
is not an LU-Pareto solution of the problem (IVP
). Hence, by Definition 3.1(ii), there exists other
such that
(65)
(65) Hence, by the definition of the
relation and (Equation65
(65)
(65) ), we have
(66)
(66) Using hypotheses (a)–(d), by Definition 2.9, the following inequalities
(67)
(67)
(68)
(68)
(69)
(69)
(70)
(70)
(71)
(71) hold. Combining (Equation66
(66)
(66) )–(Equation68
(68)
(68) ), then multiplying the resulting inequalities by the corresponding Lagrange multipliers and adding both their sides, we get
(72)
(72) Multiplying inequalities (Equation69
(69)
(69) )–(Equation71
(71)
(71) ) by the corresponding Lagrange multipliers, respectively, we obtain
(73)
(73)
(74)
(74)
(75)
(75) Using the E-KKT necessary optimality condition (Equation38
(38)
(38) ) together with
and
, we obtain, respectively,
(76)
(76)
(77)
(77)
(78)
(78) Adding both sides of the above inequalities, by (Equation72
(72)
(72) ), we obtain that the inequality
holds, which is a contradiction to the E-KKT necessary optimality condition (Equation37
(37)
(37) ). Hence,
is an LU-Pareto solution of (IVP
). Thus, by Lemma 3.7, it follows directly that
is an LU-E-Pareto solution of (IVP). Then, the proof of this theorem is completed.
Remark 3.5
As it follows from the proof of Theorem 3.16, the sufficient conditions are also satisfied if all or some of the functions ,
,
,
,
,
, are E-differentiable quasi E-invex functions at
with respect to η on Ω.
Theorem 3.17
Let be a KKT point of (IVP
). Further, assume that the following hypotheses are fulfilled:
| (a) | the objective function f is strictly LU-E-invex with respect to η at | ||||
| (b) | each function | ||||
| (c) | each function | ||||
| (d) | each function | ||||
Then is a weak LU-Pareto solution of the problem (IVP) and, thus,
is a weak LU-E-Pareto solution of the problem (IVP).
Theorem 3.18
Let be a KKT point of the problem (IVP
). Let
and
. Furthermore, assume that the following hypotheses are fulfilled:
| (a) | the objective function f is LS-E-invex with respect to η at | ||||
| (b) | each function | ||||
| (c) | each function | ||||
| (d) | each function | ||||
Then is a LS-Pareto solution of the problem (IVP
) and, thus,
is an LS-E-Pareto solution of the problem (IVP).
Proof.
By assumption, is a KKT point of the problem (IVP
). Then, the E-KKT necessary optimality conditions (Equation52
(52)
(52) )–(Equation54
(54)
(54) ) are satisfied at
with
,
and
. We proceed by contradiction. Suppose, contrary to the result, that
is not an LS-Pareto solution of the problem (IVP
). Hence, by Definition 3.2(ii), there exists other
such that
(79)
(79) Hence, by the definition of the
relation and (Equation79
(79)
(79) ), we have
(80)
(80) Using hypotheses (a)–(d), by Definition 2.10, the following inequalities:
(81)
(81)
(82)
(82)
(83)
(83)
(84)
(84)
(85)
(85) hold, respectively. Combining (Equation80
(80)
(80) )–(Equation82
(82)
(82) ), then multiplying the resulting inequalities by the corresponding Lagrange multipliers and adding both their sides, we get
(86)
(86) Multiplying inequalities (Equation83
(83)
(83) )–(Equation85
(85)
(85) ) by the corresponding Lagrange multipliers, respectively, we obtain
(87)
(87)
(88)
(88)
(89)
(89) Using the E-KKT necessary optimality condition (Equation53
(53)
(53) ) together with
and
, we obtain, respectively,
(90)
(90)
(91)
(91)
(92)
(92) Adding both sides of the above inequalities, by (Equation86
(86)
(86) ), we obtain that the inequality
holds, which is a contradiction to the E-KKT necessary optimality condition (Equation52
(52)
(52) ). Hence,
is an LS-Pareto solution of (IVP
). Thus, by Lemma 3.9, it follows directly that
is an LS-E-Pareto solution of the problem (IVP). Then, the proof of this theorem is completed.
Now, under the concepts of generalized E-invexity, we prove the sufficient optimality conditions for a feasible solution to be a weak LU-E-Pareto solution of the problem (IVP).
Theorem 3.19
Let be a KKT point of the problem (IVP
). Let
and
. Furthermore, assume the following hypotheses:
| (a) | the objective function f is strictly pseudo LU-E-invex with respect to η at | ||||
| (b) | each function | ||||
| (c) | each function | ||||
| (d) | each function | ||||
Then is a weak LU-Pareto solution of the problem (IVP
) and, thus,
is a weak LU-E-Pareto solution of the problem (IVP).
Proof.
By assumption, is a KKT point of the problem (IVP
). Then, by Definition 3.15, the E-KKT necessary optimality conditions (Equation37
(37)
(37) )–(Equation39
(39)
(39) ) are satisfied at
with
,
and
. We proceed by contradiction. Suppose, contrary to the statement, that
is not a weak LU-Pareto solution of (IVP
). Hence, by Definition 3.1(i), there exists other
such that
(93)
(93) Thus, by the definition of the
relation, for each
, we have
(94)
(94) By hypothesis (a), the objective function f is an E-differentiable strictly pseudo E-invex function with respect to η at
on Ω. Then, (Equation93
(93)
(93) ) gives
(95)
(95)
(96)
(96) By the E-KKT necessary optimality condition (Equation39
(39)
(39) ), inequalities (Equation95
(95)
(95) ) and (Equation96
(96)
(96) ) yield
(97)
(97) Since
,
, we have
From the assumption, each
,
, is an E-differentiable quasi E-invex function with respect to η at
on
. Then, by Definition 2.21, the above inequalities yield
(98)
(98) Thus, by the E-KKT necessary optimality condition (Equation39
(39)
(39) ), (Equation98
(98)
(98) ) gives
Hence, taking into account that
,
, we have
(99)
(99) By
,
, it follows that
(100)
(100)
(101)
(101) Since each function
,
, and each function
,
, are E-differentiable quasi E-invex functions with respect to η at
on
, by Definition 2.20, (Equation100
(100)
(100) ), and (Equation101
(101)
(101) ) give, respectively,
(102)
(102)
(103)
(103) Thus (Equation102
(102)
(102) ) and (Equation103
(103)
(103) ) yield
Hence, taking into account
,
, we have
(104)
(104) Combining (Equation97
(97)
(97) ), (Equation99
(99)
(99) ) and (Equation104
(104)
(104) ), we get that the following inequality:
which is a contradiction to the E-KKT necessary optimality condition (Equation37
(37)
(37) ). Hence,
is an LU-Pareto solution of the problem (IVP
). Then, by Lemma 3.7, it follows directly that
is an LU-E-Pareto solution of the problem (IVP). Thus the proof of this theorem is completed.
Theorem 3.20
Let be a KKT point of the problem (IVP
). Let
and
. Furthermore, assume the following hypotheses:
| (a) | the objective function f is strictly pseudo LS-E-invex with respect to η at | ||||
| (b) | each function | ||||
| (c) | each function | ||||
| (d) | each function | ||||
Then is a weak LS-Pareto solution of the problem (IVP
) and, thus,
is a weak LS-E-Pareto solution of the problem (IVP).
Now, we illustrate the optimality results established in the paper by the example of nonconvex nondifferentiable vector optimization problems in which the involved functions are E-differentiable.
Example 3.21
Consider the following nonconvex nondifferentiable vector optimization problem:
Note that
. Let
,
be defined as follows
and
. Now, for the considered nondifferentiable interval-valued multiobjective programming problem (IVP1), we define its associated E-vector interval-valued optimization problem (IVP1
) as follows:
Note that
is a feasible solution of the problem (VP1
). Further, note that all functions constituting the vector optimization problem (IVP1) with the multiple interval-valued objective function are weakly E-differentiable at
. Then, it can also be shown that the E-KKT necessary optimality conditions (Equation37
(37)
(37) )–(Equation39
(39)
(39) ) are fulfilled at
with
,
,
,
,
,
,
, and
. Further, it can be proved that f is a pseudo E-invex interval-valued objective function at
on
with respect to η, the constraint functions
,
,
and
are quasi E-invex at
on
with respect to η. Hence, by Theorem 3.19,
is a weak LU-Pareto solution of the problem (IVP1
) and, thus,
is a weak LU-E-Pareto solution of the considered multicriteria optimization problem (IVP1) with the multiple interval-valued objective function. Further, by Theorem 3.20,
is a weak LS-Pareto solution of the problem (IVP1
) and, thus,
is a weak LS-E-Pareto solution of the considered multicriteria optimization problem (IVP1) with the multiple interval-valued objective function (see Figures , , ).
Figure 3. Graphical view of of the problem (IVP1
).
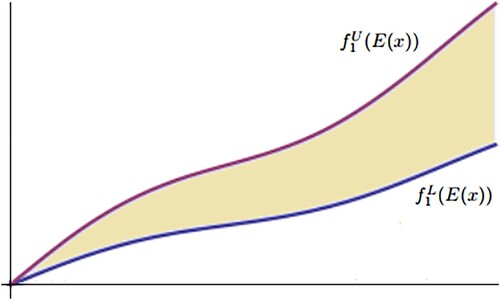
Figure 4. Graphical view of of the problem (IVP1
).
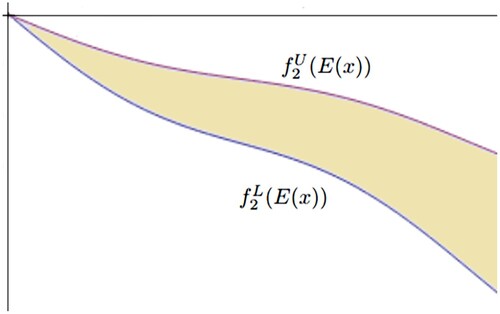
Figure 5. The set of all feasible solutions of (IVP1).
4. Concluding remarks
In this paper, we have considered E-differentiable interval-valued vector optimization problems in which their optimal solutions are defined by LU and LS relations. The so-called E-Karush–Kuhn–Tucker necessary optimality conditions have been established for the considered E-differentiable interval-valued vector optimization problem for a weak LS-E-Pareto solution. Further, the sufficient optimality conditions for the so-called (weak) LU-E-Pareto and LS-E-Pareto optimality have been derived for the considered E-differentiable vector optimization problem with multiple interval-valued objective function under E-invexity and/or generalized E-invexity hypotheses. For the case of the (weak) LU-E-Pareto optimality, the results obtained here are more general than those ones obtained previously by Antczak and Abdulaleem [Citation5]. This result has been illustrated in the paper by the suitable example of E-differentiable interval-valued vector optimization problem with E-differentiable E-invex function which is not an E-differentiable E-convex interval-valued function. For the (weak) LS-E-Pareto optimality, the results we obtained are novel for the class of E-differentiable vector optimization problems.
However, some interesting topics for further research remain. It would be of interest to investigate whether it is possible to prove similar optimality results for other classes of interval-valued optimization problems. We shall investigate these questions in subsequent papers.
Disclosure statement
No potential conflict of interest was reported by the author(s).
References
- N. Abdulaleem, E-optimality conditions for E-differentiable E-invex multiobjective programming problems, WSEAS Trans. Math. 18 (2019), pp. 14–27.
- N. Abdulaleem, E-invexity and generalized E-invexity in E-differentiable multiobjective programming, in ITM Web of Conferences, 2019, 24, 01002, pp. 1–12.
- N. Abdulaleem, Optimality and duality for E-differentiable multiobjective programming problems involving E-type I functions, J. Ind. Manag. Optim. 19(2) (2022), pp. 1513–1527.
- T. Antczak and N. Abdulaleem, E-optimality conditions and Wolfe E-duality for E-differentiable vector optimization problems with inequality and equality constraints, J. Nonlinear Sci. Appl. 12 (2019), pp. 745–764.
- T. Antczak and N. Abdulaleem, Optimality conditions for E-differentiable vector optimization problems with the multiple interval-valued objective function, J. Ind. Manag. Optim. 16 (2020), pp. 2971–2989.
- A.K. Bhurjee and G. Panda, Efficient solution of interval optimization problem, Math. Methods Oper. Res. 76 (2012), pp. 273–288.
- A.K. Bhurjee and S.K. Padhan, Optimality conditions and duality results for nondifferentiable interval optimization problems, J. Appl. Math. Comput. 50 (2016), pp. 59–71.
- Y. Chalco-Cano, W.A. Lodwick, and A. Rufián-Lizana, Optimality conditions of type KKT for optimization problem with interval-valued objective function via generalized derivative, Fuzzy Optim. Decis. Mak. 12 (2013), pp. 305–322.
- S. Chanas and D. Kuchta, Multiobjective programming in optimization of interval objective functions—A generalized approach, Eur. J. Oper. Res. 94 (1996), pp. 594–598.
- E. Hosseinzade and H. Hassanpour, The Karush–Kuhn–Tucker optimality conditions in interval-valued multiobjective programming problems, J. Appl. Math. Inform. 29 (2011), pp. 1157–1165.
- H. Ishibuchi and H. Tanaka, Multiobjective programming in optimization of the interval objective function, Eur. J. Oper. Res. 48 (1990), pp. 219–225.
- A. Jayswal, I. Stancu-Minasian, and I. Ahmad, On sufficiency and duality for a class of interval-valued programming problems, Appl. Math. Comput. 218 (2011), pp. 4119–4127.
- A. Jayswal, I. Stancu-Minasian, and J. Banerjee, Optimality conditions and duality for interval-valued optimization problems using convexifactors, Rend. Circ. Mat. Palermo. 65 (2016), pp. 17–32.
- A. Jayswal, I. Stancu-Minasian, J. Banerjee, and A.M. Stancu, Sufficiency and duality for optimization problems involving interval-valued invex functions in parametric form, Oper. Res. 15(1) (2015), pp. 137–161.
- A. Jayswal, I. Stancu-Minasian, and J. Banerjee, On interval-valued programming problem with invex functions, J. Nonlinear Convex Anal. 17(3) (2016), pp. 549–567.
- M. Jana and G. Panda, Solution of nonlinear interval vector optimization problem, Oper. Res. 14 (2014), pp. 71–85.
- S. Jha, P. Das, and S. Bandhyopadhyay, Characterization of LU-efficiency and saddle-point criteria for F-approximated multiobjective interval-valued variational problems, Results Cont. Optim. 4 (2021), pp. 100044, 1–11.
- S. Karmakar and A.K. Bhunia, An alternative optimization technique for interval objective constrained optimization problems via multiobjective programming, J. Egypt. Math. Soc. 22 (2014), pp. 292–303.
- V.I. Levin, Nonlinear optimization under interval uncertainty, Cybernet. Syst. Anal. 35 (1999), pp. 297–306.
- L. Li, S. Liu, and J. Zhang, On interval-valued invex mappings and optimality conditions for interval-valued optimization problems, J. Inequal. Appl. 179 (2015), pp. 1–19.
- J. Lin, Maximal vectors and multi-objective optimization, J. Optim. Theory Appl. 18 (1976), pp. 41–64.
- O.L. Mangasarian, Nonlinear Programming, McGraw-Hill Book Company, New York, 1969.
- A.E.M.A. Megahed, H.G. Gomma, E.A. Youness, and A.Z.H. El-Banna, Optimality conditions of E-convex programming for an E-differentiable function, J. Inequal. Appl. 246 (2013), pp. 1–11.
- R.E. Moore, Method and Applications of Interval Analysis, SIAM, Philadelphia, 1979.
- M.S. Rahman, A.A. Shaikh, and A.K. Bhunia, Necessary and sufficient optimality conditions for non-linear unconstrained and constrained optimization problem with interval valued objective function, Comput. Ind. Eng. 147 (2020), pp. 1–6.
- D. Singh, B.A. Dar, and A. Goyal, KKT optimality conditions for interval valued optimization problems, J. Nonlinear Anal. Optim. 5 (2014), pp. 91–103.
- D. Singh, B.A. Dar, and D.S. Kim, KKT optimality conditions in interval valued multi-objective programming with generalized differentiable functions, Eur. J. Oper. Res. 254 (2015), pp. 29–39.
- A.M. Stancu, Mathematical Programming with Type-I Functions, Matrix Rom, Bucharest.2013. p. 197.
- Y. Sun and L. Wang, Optimality conditions and duality in nondifferentiable interval-valued programming, J. Ind. Manag. Optim. 9 (2013), pp. 131–142.
- H-C. Wu, The Karush–Kuhn–Tucker optimality conditions in an optimization problem with interval-valued objective function, Eur. J. Oper. Res. 176 (2007), pp. 46–59.
- H-C. Wu, On interval-valued nonlinear programming problems, J. Math. Anal. Appl. 338 (2008), pp. 299–316.
- H-C. Wu, The Karush–Kuhn–Tucker optimality conditions in multiobjective programming problems with interval-valued objective functions, Eur. J. Oper. Res. 196 (2009), pp. 49–60.
- H-C. Wu, Duality theory for optimization problems with interval-valued objective functions, J. Optim. Theory Appl. 144 (2010), pp. 615–628.
- E.A. Youness, E-convex sets, E-convex functions, and E-convex programming, J. Optim. Theory Appl. 102 (1999), pp. 439–450.
- J.K. Zhang, S.Y. Liu, L.F. Li, and Q.X. Feng, The KKT optimality conditions in a class of generalized convex optimization problems with an interval-valued objective function, Optim. Lett. 8 (2014), pp. 607–631.