
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
By scaling in the complex domain (namely, complex scaling) the return difference relations of linear continuous-time periodic (LCP) feedback systems, we generalise the 2-regularised stability criteria for asymptotic stability in this paper. The stability conditions of the generalised criterion are necessary and sufficient, and involve neither contour and locus orientation specification, nor open-loop Floquet factorisation and its eigenvalues distribution. Finite-dimensional implementation of the suggested criteria is considered via a two-step truncation approach. The finite-dimensional criteria are implementable either graphically with locus plotting, or numerically without locus plotting, besides retaining the aforementioned technical advantages. Furthermore, also exploiting the complex scaling technique, stabilisation of LCP systems with static state feedback is worked out in the internal or external stability sense, whose alternative interpretations in terms of the small-gain theorem and the Gronwall inequality are explicated. To illustrate the main results, the lossy Mathieu differential equation is investigated.
1. Introduction
Stability analysis and stabilisation are inevitably more difficult when linear continuous-time periodic (LCP) systems (Bittanti & Colaneri, Citation2001; Farkas, Citation1994; Halanay, Citation1966; Montagnier, Spiteri, & Angeles, Citation2004; Zhou & Hagiwara, Citation2005; Zhou, Hagiwara, & Araki, Citation2002) are considered, due to issues in transition matrix computing and Floquet factorisation for Floquet-Lyapunov coordinates transformation. We are frequently confronted with LCP models in engineering applications such as modelling flapping dynamics of helicopter rotor blades (Dugundji & Wendelll, Citation1983) and describing rolling motion of ships in waves (Allievi & Soudack, Citation1990). Miscellaneous stability terminologies and techniques for LCP systems are discussed. For example, absolute stability of LCP systems with nonlinearities subject to integral quadratic constraints is dealt with in Kao, Megretski, and J"e;onsson (Citation2001) and Yakubovich (Citation1988) by the cutting plane algorithm and the Hamiltonian approach, respectively, while input/output stability and Youla-style parametrization of stabilising controllers are discussed in Cantoni and Glover (Citation2000) via the graph representation. The Fredholm theory is adopted in stability testing and computation by Lampe and Rossenwasser (Citation2010, Citation2011). As is well known, the Floquet theorem reflects asymptotic stability in LCP systems by eigenvalues distribution of the so-called monodromies that can only be calculated generally via numerical integral. Asymptotic stability in LCP systems has also been attacked by the Lyapunov method (Bolzern & Colaneri, Citation1988) and the harmonic analysis (Zhou et al., Citation2002). Perturbation methods to study stability in LCP systems can be found in Nayfeh and Mook (Citation1979); Zhou and Qian (Citation2017a). Indeed, LCP systems belong to a big class of complicated systems nearest to LTI ones, which have been investigated quite intensively via the harmonic analysis (Zhou & Hagiwara, Citation2005; Zhou et al., Citation2002; Zhou, Lu, & Qian, Citation2016).
In feedback configurations with LCP plants, a stability criterion is suggested in Hall and Wereley (Citation1990), which is integral-operator-based (namely, integral operator modelling of periodic systems). Regarding infinite-dimensionality and truncation convergence issues in the Hill-determinant, the result validity in Hall and Wereley (Citation1990) was not given. Recently, a generalised Nyquist criterion in 2-regularised determinant is reported in Zhou and Hagiwara (Citation2005). Although implementation algorithms are also contrived in Zhou and Hagiwara (Citation2005), the algorithms entail Floquet factorizations for providing open-loop poles distribution and guarantee numerical convergence in truncating infinite-dimensional Toeplitz operators during locus plotting. As is well known, transition matrices in LCP systems are hard to fix and so are their Floquet factorizations. Since irreducible/reducible Floquet factorizations may yield controllability/observability discrepancies (Zhou et al., Citation2016), internal stability may not be reflected appropriately and rigorously.
To surmount various algebraic and structural obstacles in stability analysis and stabilisation (Zhou, Qian, & Lu, Citation2017), the complex scaling technique is suggested and brings us with fruitful results in complicated feedback systems, say fractional-order (Zhou, Citation2017), sampled-data (Zhou & Qian, Citation2017b), time-delayed (Zhou, Gao, & Lu, Citation2018) and even nonlinear systems (Zhou, Citation2018). It must be stressed that although the same mathematical tool is adopted in the studies, different types of return difference relations with essentially different properties must be dealt with. This is also the case in LCP systems, whose complex-domain relations are infinite-dimensional.
In this paper, the feedback connections with LCP plants and controllers are attacked via complex scaling. More precisely, the harmonic return difference relation (Zhou & Hagiwara, Citation2005) is re-written into a complex scaling manner by separating the open- and closed-loop characteristic polynomials, with respect to prescribed scaling comparators. Based on the argument principle of complex analysis, we validate rigorously the complex scaling 2-regularised criteria for asymptotic stability in LCP systems (Zhou, Citation2013). The suggested stability conditions are necessary and sufficient. Different from the criteria of (Zhou & Hagiwara, Citation2005; Zhou et al., Citation2002), however, the complex scaling ones involve no open-loop Floquet factorisation and are stated with self-defined contour and locus orientation conditions. Implementation algorithms are proposed via truncating the harmonic transfer operators, in terms of finite-dimensional LTI system approximations. Moreover, the finite-dimensional criteria can be employed graphically with locus plotting, or numerically by computing complex argument incremental; the latter makes the approach be numerically tractable so that it is suitable for stabilisation as well.
Outline. Section 2 gives preliminaries to Toeplitz transformation of periodic functions and harmonic transfer operators. In Section 3, the complex scaling return difference relation is created, and the complex scaling stability criteria are claimed. Finite-dimensional implementation and its numerical convergence are considered in Section 4. Stabilization design for LCP systems is examined in Section 5. The lossy Mathieu equation is examined to illustrate the main results in Section 6. Conclusions are summarised in Section 7.
2. Notations and preliminaries to LCP systems
2.1. Notations and terminologies
In the paper, denotes the absolute value of a scalar, the Euclidean vector norm and the induced matrix norm.
is the set of all infinite-dimensional vectors
with
, where
is the m-th entry of
.
denotes the
-induced norm for an operator
.
is the linear space of all measurable functions
defined on
with
.
is the field of all complex numbers and
is the ring of all integers.
denotes the set of all eigenvalues of
, while the k-th one is meant by
. We denote the subsets
,
, and
. PCD implies
is piecewise continuous and differentiable a.e. (almost everywhere); PCC implies that
is piecewise continuous and its Fourier series is convergent a.e., and AC means that the Fourier series of
is absolutely convergent.
To understand the 2-regularised determinant, let denote the i-th eigenvalue of a linear compact operator
and
be its i-th singular value. For p=1,2, the set of all compact operators satisfying
is denoted by
and
, respectively. The operators in
are trace class while those in
are Hilbert-Schmidt (Böttcher & Silbermann, Citation1990; Gohberg, Goldberg, & Krupnik, Citation2000). Clearly,
. For
, the operator trace and determinant
,
are well-defined if the infinite summation and product converge. For
, let
. Thus,
is the 2-regularised determinant of I+A.
Expand to its Fourier series
with
. The Toeplitz transformation of
, denoted by
, maps
into a doubly infinite-dimensional block Toeplitz operator (or block Laurent operator (Gohberg, Goldberg, & Kaashoek, Citation1993, p. 564)) as
2.2. Preliminaries to LCP systems
Firstly, consider the LCP system
(1)
(1) where
and
are h-periodically time-varying. Let
be the transition matrix. By the Floquet theorem (Lukes, Citation1982), if
, then
is absolutely continuous in t and has Floquet factorisation
, where
is absolutely continuous, nonsingular and h-periodic in t, and Q is a constant (probably complex) matrix. The system is asymptotically stable if and only if all eigenvalues of Q lie in the open left-half plane.
Secondly, we define ,
,
,
,
and
, where
and I is the
identity matrix. In addition,
, which is dense in
. It is easy to see that
and
are unbounded and densely defined on
and satisfy
(2)
(2) Moreover, the system is asymptotically stable if and only if all eigenvalues of
lie in the open left-half plane. Also,
.
Thirdly, we introduce the harmonic transfer operator of (Equation1(1)
(1) ) by
(3)
(3) To ensure well-definedness of
and
, let us define a domain
to satisfy: (A1). Ω is simply connected and has a simple closed boundary
; also,
over
. (A2). For each
,
is an invertible mapping from
to
. (A3). For each
,
is an invertible mapping from
to
with
being bounded.
When the domain Ω is meant as above, for all , we have
(4)
(4) which says that
is well-defined for all
.
Finally, for each , it holds that
(5)
(5) where
is analytic and vanishes nowhere over
. Also,
is invertible for each
and the inverse is bounded on
. In other words, asymptotic stability of (Equation1
(1)
(1) ) is reflected by the zeros of
. This is the starting point of the study.
3. Complex scaling stability criterion
In this section, we develop a complex scaling criterion for stability of LCP feedback connections. More precisely, let ,
,
, to which an h-periodic output feedback
is installed. This yields us the closed-loop LCP system
(6)
(6) Here v is a new reference and assume that
. Clearly,
.
can also be formed with a dynamic controller. Such cases bring no essential problems. For simplicity, we only address asymptotic stability of (Equation6
(6)
(6) ) by examining stability conditions in term of the 2-regularised determinant.
3.1. Cauchy contour and 2-regularised determinant return difference relation
We recall by the block diagonal expression of : (i) all eigenvalues of
are located in a vertical strip region; (ii) all the eigenvalues in the horizontal fundamental strip
(7)
(7) unfold themselves vertically to
and
with period
. Thus, if we know the eigenvalues distribution of
in
, the whole eigenvalues distribution of
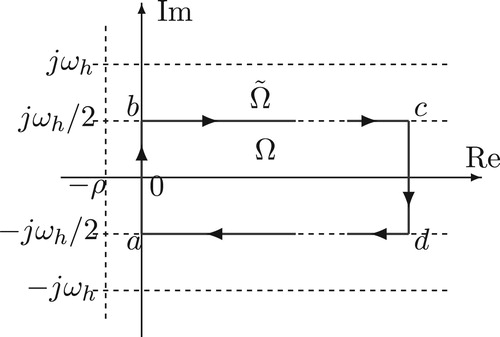
is clarified. Based on these facts, let the Cauchy integral contour be the boundary of the right-half portion of
, namely the bold-line curve
in Figure , whose interior is denoted by Ω. By Figure , we have
Since
may not be well-defined for some
if
is not empty (namely,
has eigenvalues on
),
must detour these points in
. If
is not empty, the contour will be slightly shifted as
, where α and β are small constants. Since Λ is the set of isolated points,
always exists. In the sequel, we do not specify which contour is meant by
.
As is known by Zhou and Hagiwara (Citation2005), the return difference relation between the open-loop and closed-loop characteristic polynomials is rigorously established and quoted as follows.
(8)
(8) where
and
(9)
(9) In (Equation8
(8)
(8) ) and (Equation9
(9)
(9) ),
is introduced to guarantee that
exists when s is running over the imaginary axis portion of the Cauchy contour. Independent of
, the zeros of
and those of
are nothing but the zeros of the closed-loop and open-loop characteristic polynomials, respectively.
Figure 1. Cauchy contour for asymptotic stability in LCP systems.
3.2. Complex scaling stability locus
To define the complex scaling locus, we re-write (Equation8(8)
(8) ) as
(10)
(10) Thus, we can re-write the open- and closed-loop characteristic polynomials in (Equation8
(8)
(8) ) into a separate fashion with the complex scaling comparator
. The comparator satisfies
is meromorphic and Hurwitz. Factor cancellations between
Zeros of
Indeed, we can simply define
(11)
(11) where
can be any Hurwitz matrix. Obviously, the above conditions are satisfied by this scaling comparator. In the sequel,
of (Equation11
(11)
(11) ) is always meant.
Now, let us see how a complex scaling locus is yielded according to (Equation10(10)
(10) ) along
. We segment
into
,
,
and
as in Figure and do the following observations.
Since
If
In summary, the locus forms a closed curve. To investigate its encirclement around the origin with respect to the whole
, it is enough to see only the segments corresponding to
,
and
. In the sequel, the closed curve of piecing together the segments corresponding to
,
and
is called the complex scaling locus.
3.3. Complex scaling stability criterion
Now we are ready to state and show the complex scaling stability criterion.
Theorem 3.1
Assume that of the LCP system (Equation1
(1)
(1) ) and the feedback matrix
belong to
. Then, the closed-loop system (Equation6
(6)
(6) ) is asymptotically stable if and only if the complex scaling locus
, or simply
, vanishes nowhere over
, and the number of the clockwise encirclements around the origin is equal to that of the counter-clockwise encirclements around the origin. In the above,
and
are defined in (Equation10
(10)
(10) ) and (Equation11
(11)
(11) ), respectively, and
.
Proof.
Apply the argument principle (Stein & Shakarchi, Citation2003, p. 90) to (Equation10(10)
(10) ). It follows that
(12)
(12) where
and
denote the zeros and poles numbers of
, respectively, in Ω, while
and
mean the clockwise and counter-clockwise encirclement numbers of a locus
, respectively.
Further, by the definitions of and
, they have the same denominator polynomial, which is the nominator of
. Hence, it is easy to see that
(13)
(13) and
(14)
(14) The relations in (Equation14
(14)
(14) ) must be interpreted before removing all reducible factors between
and
as appropriately.
Substituting the above results for (Equation12(12)
(12) ), we can write
(15)
(15) It follows immediately that if
, and thus
. This tells us exactly that the closed-loop LCP system has no poles in Ω. This leads to asymptotical stability, and the sufficiency is proved.
To see the necessity, assume that the closed-loop system is asymptotically stable. Thus, . Based on (Equation14
(14)
(14) ) and (Equation15
(15)
(15) ), we notice that
, which says that the complex scaling locus has the same clockwise and counter-clockwise encirclements around the origin. This accomplishes the proof.
Some remarks about Theorem 3.1:
Clearly, the complex scaling 2-regularised determinant return difference relation (Equation10
Reducible factors between
Stability in Theorem 3.1 is meant in asymptotical stability. If the state decreasing ratio is examined, the conditions should be interpreted in exponential stability. It is simple to see that such stability analysis can be achieved by replacing the contour
4. Finite-dimensional versions of Theorem 3.1
Since the 2-regularised determinant and trace of infinite dimensionality operators are involved, we must consider how to implement Theorem 3.1 by operator matrix truncations. Then, stability analysis is reduced to that of finite-dimensional LTI systems.
4.1. Two-step truncation on Toeplitz operators
Firstly, let us truncate to
with
and
(16)
(16) We similarly define
(resp.,
),
(resp.,
) and
(resp.,
)
Secondly, based on the two-step truncation, is approximated by
(17)
(17) where
(18)
(18) with
.
Finally, we apply the two-step truncation on to obtain
(19)
(19) where
(20)
(20)
4.2. Convergence lemma about the two-step truncation
We collect convergence relations for the two-step truncations in the 2-regularised determinant and trace, which can be shown by the proof techniques in Zhou and Hagiwara (Citation2005).
Lemma 4.1
Assume in the FDLCP system (Equation1(1)
(1) ) that
and
, and the domain
satisfies (A1). Then for any
and each fixed N>0, there exists an integer
such that for all
and uniformly over
, it holds
Now we show that the truncated version can actually be reduced to finite-dimensional computations with convergence being ensured. Indeed, by definition, we have
(21)
(21) where
in which
.
Under the assumptions of Lemma 4.1, for any fixed N>0, it holds uniformly over that
The above convergence relations, together with (Equation21
(21)
(21) ), imply that for any
sufficiently small and fixed N>0 sufficiently large, it holds as
that
(22)
(22)
4.3. Finite-dimensional complex scaling stability criterion
Summarizing the above discussions, we are led to the following theorem, which reduces the infinite-dimensional criterion of Theorem 3.1 to a finite-dimensional version.
Theorem 4.1
Suppose in the LCP system (Equation1(1)
(1) ) that
,
,
. Let the feedback matrix
belong to
. Then, the closed-loop system (Equation6
(6)
(6) ) is asymptotically stable if and only if there exist sufficiently large integers N>0 and
such that the finite-dimensional complex scaling locus
(23)
(23) vanishes nowhere over
, and the number of the clockwise encirclements around the origin is equal to that of the counter-clockwise encirclements.
In the above, is arbitrarily taken, and
and
are defined in (Equation18
(18)
(18) ) and (Equation20
(20)
(20) ), respectively, with m=0. Also
(24)
(24) where
with
being some arbitrary Hurwitz matrix, and
is the
identity matrix.
is defined in Theorem 3.1.
Proof.
The stability assertion follows from Theorem 3.1 if we notice the truncation convergence is guaranteed when N>0 and are sufficiently large by Lemma 4.1. This gives the convergence properties between the infinite- and finite-dimensional complex scaling loci as in (Equation22
(22)
(22) ). From this, we can assert that the finite-dimensional complex scaling locus defined by (Equation23
(23)
(23) ) must lie in a narrow neighbourhood along the infinite-dimensional complex scaling locus of Theorem 3.1. This in turn implies that the finite-dimensional locus vanishes nowhere, and has the same number of clockwise and counter-clockwise encirclements around the origin of the complex plane, if and only if the infinite-dimensional one does so. Based on this and applying the argument principle to
along
, together with the fact that the comparator
have no eigenvalues in Ω, we can say that the closed-loop characteristic polynomial
has no eigenvalues in Ω, either. Thus, asymptotic stability in the closed-loop system is confirmed.
Some remarks about Theorem 4.1:
Since no open-loop poles are involved, the stability conditions can be implemented without locus plotting. That is, we can implement the criterion by computing the argument incremental
5. Stabilization in LCP systems
In this section, we propose several design algorithms in term of static state feedback for stabilising LCP systems that have h-periodic state matrices but the input matrices are constant. That is, we consider the following LCP system
(25)
(25) where
is h-periodic and
is constant. To (Equation25
(25)
(25) ), we introduce a state feedback
(26)
(26) where
is constant and
is a new reference. The closed-loop LCP system is
(27)
(27) Our problem hereafter is: fix possible constant feedback gain matrix
such that the closed-loop LCP system is asymptotically stable.
5.1. Stabilization design via the complex scaling approach
To facilitate our statements, let us define the closed-loop characteristic polynomial as
where
,
and
, while
; that is,
is the infinite- dimensional matrix after removing all the block-diagonal terms from
. Let us write
and then we observe that
The last equation follows from the fact that
is block-diagonal, and all the diagonal blocks in
are zero. Then,
.
Now let us further choose the complex scaling comparator
(28)
(28) where is a Hurwitz polynomial if all the eigenvalues of
can be assigned to have negative real parts by choosing
appropriately.
Using , we define the complex scaling function
(29)
(29) Now let us examine what happens in
as the variable s travels along the Cauchy contour
. We observe the following facts:
If
With respect to the expected eigenvalues of
Based on the above observations, we claim the following results for stabilisation.
Theorem 5.1
Consider the LCP system (Equation25(25)
(25) ) with
under the static state feedback (Equation26
(26)
(26) ). Let the pair
be controllable. If there is a feedback gain
satisfying (Equation30
(30)
(30) ) and
is Hurwitz, then the closed-loop LCP system (Equation27
(27)
(27) ) is asymptotically stabilised.
Proof.
Under the assumptions, let be (Equation28
(28)
(28) ), which is Hurwitz due to our pole assignment with
. Then, by (Equation29
(29)
(29) ), we can investigate the following stability locus with respect to
.
(31)
(31) Therefore, stabilisation is attainable if we can assert that the locus does not encircle the origin under the feedback gain
. Or equivalently,
exists such that all roots of
are assigned to the left half-plane.
To this end, let us note that the operator is compact, which has infinitely countable eigenvalues. By Theorem 4.4 of (Conway, Citation1990, p. 41), we see that there exists an operators sequence
of finite rank such that for each fixed s,
as
. Actually, we can define
where
denotes an infinite-dimensional matrix defined on
, whose block-wise
sub-matrix at its centre is that of
and all other blocks are zero matrices. By this definition,
is of finite rank and compact. This says that the eigenvalues of
are well-defined, and the i-th one is denoted by
with
. That is, the set
contains all eigenvalues of
.
Next, it is also clear by (Equation30(30)
(30) ) that for any specific
Together with
, we see that
. Note that
is continuous in
and s. Thus, we can conclude from (Equation30
(30)
(30) ) that
uniformly over
for some
sufficiently small.
Using , we notice by the 2-regularised determinant theory that
The last relation follows from the fact that
. This is a direct result of the specific zero-diagonal expression of
.
From the definition formula of , the following points follow readily.
Firstly, since for each i over
, thus
for all
. Thus, the locus of
vanishes nowhere; or equivalently, we write
over
.
Secondly, and
for each fixed
. This implies that for any
, each
forms a complex phaser from
to a point in some closed κ-related neighbourhood around the point
. The complex argument
, namely the angle subtended by the phaser and the positive real axis, satisfies
uniformly over
as
for all
. Then, we conclude that
This in turn implies that
Bearing this in mind, after plotting
that consists of the locus portion in s and that in
, which is symmetric with respect to the real axis, the total complex argument of the locus at s and
is strictly less than
so that the locus cannot encircle the origin
. This says exactly nothing but that the entire locus
is within a bounded range around the point
that excludes
. It follows that under the given assumptions, the entire locus
has no encirclements around the origin.
Thirdly, after trivial algebras based on (Equation30(30)
(30) ), we obtain that
as k>0 is sufficiently large. This says that the locus
must be within a narrow neighbourhood of the locus
. Therefore, what we have claimed on the latter can also be retrieved on the former; in particular, the locus
has no encirclements around the origin. Based on the argument principle, it follows that the closed-loop characteristic polynomial
has no zeros in the closed right half-strip of the fundamental strip
.
Stabilization design procedures based on Theorem 5.1:
Step 1.Compute
Step 2.Prescribe expected eigenvalues
Step 3.Fix
Clearly, the inequality (Equation30(30)
(30) ) is satisfied as long as (Equation32
(32)
(32) ) is true. In addition, it is well known that
can be manipulated arbitrarily by the
norm performance optimisation technique (Zhou & Doyle, Citation1998). In fact, by the block-diagonal expression of
, it is simple to see that
.
5.2. Stabilization design via the small-gain theorem
In this subsection, we show that stabilisation can be achieved by working with the small-gain theorem (Haddad & Chellabonina, Citation2008; Khalil, Citation2000) under the inequality condition
(33)
(33) To this end, let us note that the closed-loop LCP system (Equation27
(27)
(27) ) can be equivalently intrepreted as a feedback configuration in the state-space equation form of
(34)
(34) where
is viewed as a harmonic feedback combination term.
We observe by the Parseval theorem that
In the above,
denotes the
-norm of
.
Now let us assume in (Equation34(34)
(34) ) that
for all t. It follows that
(35)
(35) The upper bounded-ness in (Equation35
(35)
(35) ) follows from the assumption that
. Furthermore, note that the LTI system (Equation34
(34)
(34) ) with
satisfies
(36)
(36) which is the
norm between
and
of (Equation34
(34)
(34) ); or the
-gain from
to
is equivalent to its operator norm induced by the
-norm (Zhou & Doyle, Citation1998).
Based on (Equation33(33)
(33) ), (Equation35
(35)
(35) ) and (Equation36
(36)
(36) ), the small-gain theorem (Haddad & Chellabonina, Citation2008; Khalil, Citation2000) produces us with the following stabilisation but in the
-stability sense.
Theorem 5.2
Consider the LCP system (Equation25(25)
(25) ) with
under the static state feedback (Equation26
(26)
(26) ). Let
be controllable. If there is a feedback gain
satisfying (Equation33
(33)
(33) ) and
is Hurwitz, then the closed-loop LCP system (Equation27
(27)
(27) ) is
-stabilised.
Some remarks about Theorem 5.2:
Note that (Equation32
The inequality (Equation32
Since the measured output of (Equation34
5.3. Stabilization design via the gronwall inequality
By the variation-of-constants formula (Lukes, Citation1982) for solutions to differential equations, the zero-input state solution to (Equation27(27)
(27) ) is given by
which yields that
If
is Hurwitz, there exist constants
and K>0 satisfying
,
(Bernstein, Citation2009; Lukes, Citation1982). Indeed,
can be any positive number satisfying
for all k, and K>0 is a positive number depending on
and
. Then, it is true that
Or equivalently, it holds that
which leads by the Gronwall inequality (Lakshmikantham, Leela, & Martynyuk, Citation1989, p. 2, Theorem 1.1.1) that
Thus,
as
if
, or the system is asymptotically stable. This is attainable as
is Hurwitz by choosing
with
being sufficiently large.
6. Numerical illustrations
The lossy Mathieu differential equation is frequently encountered in studies like rolling motion of ships (Allievi & Soudack, Citation1990) and pendulum motions with periodically excited support (Guckenheimer & Holmes, Citation1983). Comprehensive studies can be found in Richards (Citation1983).
from which we construct the following state-space model
where
Note that
and
are constant but the Fourier series of
has nonzero terms only up to the first-order harmonic wave, whose entries are continuous and differentiable on
.
Now introduce the static output feedback , where k is a scalar constant to the lossy Mathieu equation, and then the closed-loop LCP system is formed. In this subsection, we illustrate stability analysis of the closed-loop LCP system.
Note again that ,
are constant and the Fourier series of
has nonzero terms up to the first-order harmonic wave. Therefore, any first-step truncation of
yields truncated matrices with the same nonzero entries as those of N=1. In view of this, the two-step truncation can be defined by N=1 and M=5 reasonably. Indeed, our numerical simulations with N=1 and M>5 show no obvious difference.
is taken in all simulations. The open-loop system has a zero eigenvalue, and thus a shifting factor
is used. The comparator
in (Equation11
(11)
(11) ) is constructed with
.
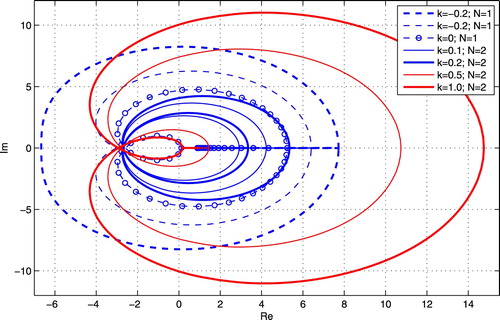
In the following figures, the dashed curves denote the complex scaling loci that have non-zero net encirclements around the origin, while the solid curves denote those that have zero net encirclements. The thick curves stand for those with respect to k=0. In the legends boxes, the number N means the net encirclements number, which is computed numerically (independent of the loci) through complex argument incremental integral as explained about Theorem 4.1.
6.1. Stability analysis illustration
Figure presents us the complex scaling loci about the k-related cases when and
are specified.The closed-loop LCP system is stable when k>0 is relatively small, if we notice that all loci with k>0 (plotted with solid lines) neither pass through nor encircle the origin. When k<0, the closed-loop LCP system is unstable, since all the complex scaling loci (plotted with dashed lines) encircle the origin once. The assertions with
and
coincide with what we have seen by the harmonic approach (Zhou et al., Citation2002), and the 2-regularised determinant method (Zhou & Hagiwara, Citation2005).
Figure presents the stability loci about the k-related cases when and
are specified. Clearly, each and all the loci have one or two net encirclement(s) around the origin. Thus, in each case the closed-loop system is unstable by Theorem 4.1.
Figure 2. Complex scaling loci with and
.
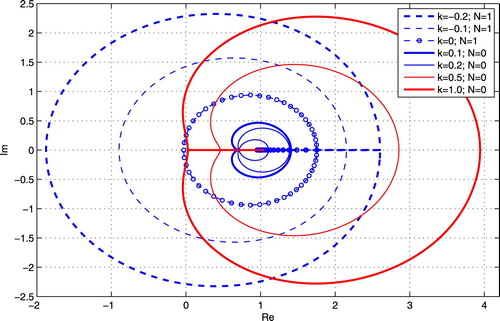
Figure 3. Complex scaling loci with and
.
Indeed, the closed-loop state matrix of the example LCP system is
Therefore, according to the Floquet theorem, asymptotical stability of the closed-loop LCP system can be tested by forming the so-called monodromy of
, computing its eigenvalues and checking whether or not all eigenvalues are within the unit circle.
Figures and plot the monodromy eigenvalue loci of under
by the dotted lines with
and
, respectively, whereas
is fixed. In these figures, the dashed-line curves illustrate the unit circle. Due to the inequitable scaling in the x- and y-axes, the unit circles turn out to be ovals in shape. The crosses, namely ×'s, denote the eigenvalues at k=−1, and the tiny circles, namely °'s, stand for those at k=1.
Figure 4. Monodromy eigenvalue loci of for
with
and
.
![Figure 4. Monodromy eigenvalue loci of Ac(t) for k∈[−0.2,1] with β=0.35 and ξ=0.2.](/cms/asset/b6ee4a39-be6a-467f-bfa6-02c8891cc4fb/tcon_a_1540888_f0004_oc.jpg)
Figure 5. Monodromy eigenvalue loci of for
with
and
.
![Figure 5. Monodromy eigenvalue loci of Ac(t) for k∈[−0.2,1] with β=0.35 and ξ=−0.2.](/cms/asset/37511086-b65c-4c78-87a2-f625827463f6/tcon_a_1540888_f0005_oc.jpg)
Comparing Figure (resp, Figure ) to Figure (resp., Figure ), one can quickly find that the monodromy eigenvalue loci validate the stability assertions.
6.2. Stabilization illustration
Figure says that when , the lossy Mathieu equation cannot be stabilised via static output feedback, due to uncontrollability (Zhou et al., Citation2016). To address this problem, we additionally install a static state feedback
with
, beside the static output feedback
, and the closed-loop system is described by
Clearly, the closed-loop state matrix is still h-periodic. In the sequel, we illustrate that by pole assignment about the eigenvalues of
, stabilisation of the closed-loop LCP system is attainable even if
.
The characteristic polynomial for is
Then, the closed-loop eigenvalues are
Hence, by choosing
and
appropriately, the eigenvalues of
can be assigned arbitrarily. This is not surprising since
is controllable.
In particular, if we let and
satisfy
and
, then the eigenvalues of
can be a pair of complex conjugates with negative real parts. Moreover, if stability robustness is concerned, the bigger
is, the better. For example, when
that assigns the eigenvalues at
, the complex scaling loci are given in Figure as the output feedback gain varies over
. Clearly, in each k, the complex scaling locus neither passes through nor encircles the origin. Theorem 4.1 says that the closed-loop LCP system is stabilised. This can also be verified simply by Theorem 5.1 as well as Theorem 5.2.
The monodromy eigenvalue loci of the closed-loop LCP system are given in Figure . It must be pointed out that since the unit circle is far beyond the plotting range of Figure , the eigenvalue loci are entirely located within the unit circle. This coincides with the results of Figure .
As comparison with some existing stability analysis methods for LCP systems, stability analysis about the same lossy Mathieu differential equation were reported in Zhou et al. (Citation2002) and Zhou and Hagiwara (Citation2005), where Floquet factorisation and Fourier series are heavily relied upon and thus the numerical implementation is a hard task. What is more, stabilisation is hampered simply due to Floquet factorisation and harmonic analysis. In view of these facts, it is reasonable to say that the suggested approaches are promising in analysis and synthesis of LCP control systems.
Figure 6. Complex scaling loci of stabilisation under the feedback gain with
and
.
![Figure 6. Complex scaling loci of stabilisation under the feedback gain K=[3.40,3.25] with β=0.35 and ξ=−0.2.](/cms/asset/9a492363-08ae-46b7-bf55-636ee429fe83/tcon_a_1540888_f0006_oc.jpg)
Figure 7. Monodromy eigenvalue loci of for
under
with
and
.
![Figure 7. Monodromy eigenvalue loci of Ac(t) for k∈[−0.2,1] under K=[3.40,3.25] with β=0.35 and ξ=−0.2.](/cms/asset/722ea299-e416-4955-b47a-2506cfc254a5/tcon_a_1540888_f0007_oc.jpg)
7. Conclusions
In this study, we establish an alternative 2-regularised stability criterion for LCP systems by means of complex scaling. The main results are summarised in Theorem 3.1 in term of infinite-dimensional Toeplitz operators, which has a finite-dimensional version as in Theorem 4.1. These criteria make it possible to test asymptotic stability in feedback LCP systems through frequency-domain features without open-loop structural knowledge and Floquet factorizations. How to exploit these advantages for stabilisation in the LCP setting is also scrutinised in the paper. The main results are summarised in Theorems 5.1 and 5.2.
Technical significance of the study is that without Floquet-Lyapunov transformation, Nyquist-like criteria can still be developed in LCP feedback systems for stability analysis and stabilisation, even if no open-loop structural features are available. Such technical advantages do not exist if working with numerical monodromy computation. This is especially the case when the concerned LCP systems are high-dimensional and with multiple feedbacks.
Disclosure statement
No potential conflict of interest was reported by the author.
ORCID
Additional information
Funding
Related Research Data
References
- Allievi, A., & Soudack, A. (1990). Ship stability via the Mathieu equation. International Journal of Control, 51, 139–167. doi: 10.1080/00207179008934054
- Bernstein, D. S. (2009). Matrix mathematics: Theory, facts and formulas (2nd ed.). New Jersey: Princeton University Press.
- Bittanti, S., & Colaneri, P. (2001). Stabilization of periodic systems: overview and advances. In Proceedings of IFAC Workshop on Periodic Control Systems (pp. 157–162), Italy.
- Bolzern, P., & Colaneri, P. (1988). The periodic Lyapunov equation. SIAM Journal of Matrix Analysis and Applications, 9, 499–512. doi: 10.1137/0609041
- Böttcher, A., & Silbermann, B. (1990). Analysis of Toeplitz operators. Berlin: Springer-Verlag.
- Cantoni, M., & Glover, K. (2000). Existence of right and left representations of the graph for linear periodically time-varying systems. SIAM Journal of Control and Optimization, 38, 786–802. doi: 10.1137/S0363012998346608
- Conway, J. B. (1990). A course in functional analysis (2nd ed.). New York: Springer.
- Dugundji, J., & Wendelll, J. H. (1983). Some analysis methods for rotating systems with periodic coefficients. AIAA Journal, 21, 890–897. doi: 10.2514/3.8167
- Farkas, M. (1994). Periodic motions. New York: Springer-Verlag.
- Gohberg, I., Goldberg, S., & Kaashoek, M. A. (1993). Classes of linear operators (Vol. II). Birlin: Birkhäuser.
- Gohberg, I., Goldberg, S., & Krupnik, N. (2000). Traces and determinants of linear operators. Berlin: Birkhäuser.
- Guckenheimer, J., & Holmes, P. (1983). Nonlinear oscillations, dynamical systems, and bifurcations of vector fields. New York: Springer-Verlag.
- Haddad, W. M., & Chellabonina, V. (2008). Nonlinear dynamical systems and control: A Lyapunov-based approach. Oxford: Princeton University Press.
- Halanay, A. (1966). Differential equations: Stability, oscillations, time lags. New York: Academic Press.
- Hall, S. R., & Wereley, N. W. (1990). Generalized criterion for linear time systems. In Proceedings of the 1990 American Control Conference (pp. 1518–1525), San Diego.
- Kao, C. Y., Megretski, A., & Jonsson, U. T. (2001). A cutting plane algorithm for robustness analysis of periodically time-varying systems. IEEE Transactions on Automatic Control, 46, 579–592. doi: 10.1109/9.917659
- Khalil, H. (2000). Nonlinear systems (3rd ed.). New Jersey: Pearson Educational International Inc.
- Lakshmikantham, V., Leela, S., & Martynyuk, A. A. (1989). Stability analysis of nonlinear systems. New York and Basel: Marchel Dekker, Inc.
- Lampe, B. P., & Rossenwasser, E. N. (2010). Using the Fredholm resolvent for computing the H2-norm of linear periodic systems. International Journal of Control, 83(9), 1868–1884. doi: 10.1080/00207179.2010.498060
- Lampe, B. P., & Rossenwasser, E. N. (2011). Stability investigation for linear periodic time-delayed sytems using Fredholm theory. Automation and Remote Control, 72(1), 38–60. doi: 10.1134/S0005117911010048
- Lukes, D. L. (1982). Differential equations: Classical to controlled. New York: Academic Press.
- Montagnier, P., Spiteri, R. J., & Angeles, J. (2004). The control of linear time-periodic systems using Floquet-Lyapunov theory. International Journal of Control, 77, 472–490. doi: 10.1080/00207170410001667477
- Nayfeh, A. H., & Mook, D. T. (1979). Nonlinear oscillations. New York: Wiley.
- Richards, J. A. (1983). Analysis of periodically time-varying system. New York: Springer-Verlag.
- Stein, E. M., & Shakarchi, R. (2003). Complex analysis. New Jersey: Princeton University Press.
- Yakubovich, V. A. (1988). Dichotomy and absolute stability of nonlinear systems with periodically non-stationary linear part. Systems & Control Letters, 11, 221–228. doi: 10.1016/0167-6911(88)90062-X
- Zhou, J. (2013). Contraposition 2-regularized Nyquist criterion in linear continuous-time periodic systems. In Proceedings of the 5th IFAC Workshop on Periodic Control Systems (pp. 149–154), Caen, France.
- Zhou, J. (2017). Complex-domain stability criteria for fractional-order linear dynamical systems. IET Control Theory and Applications, 11(16), 2753–2760. doi: 10.1049/iet-cta.2016.1578
- Zhou, J. (2018). Interpreting Popov criteria in Luré systems with complex scaling stability analysis. Communications in Nonlinear Science and Numericalal Simulation, 59, 306–318. doi: 10.1016/j.cnsns.2017.11.029
- Zhou, K. M., & Doyle, J. C. (1998). Essentials of Robust control. New York: Prentice Hall.
- Zhou, J., Gao, K. T., & Lu, X. B. (2018). Complex scaling approach for stability analysis and stabilization of multiple time-delayed systems. Mathematical Problems in Engineering, 2018, Article ID: 8492735, 14 pages.
- Zhou, J., Hagiwara, T., & Araki, M. (2002). Stability analysis of continuous-time periodic systems via the harmonic analysis. IEEE Transactions on Automatic Control, 47, 292–298. doi: 10.1109/9.983361
- Zhou, J., & Hagiwara, T. (2005). 2-regularized Nyquist criterion in linear continuous-time periodic systems and its implementation. SIAM Journal of Control and Optimization, 44, 618–645. doi: 10.1137/S0363012902416900
- Zhou, J., Lu, X. B., & Qian, H. M. (2016). Controllability discrepancy and irreducibility/reducibility of Floquet factorizations in linear continuous-time periodic systems. International Journal of Systems Science, 47, 2965–2974. doi: 10.1080/00207721.2015.1053830
- Zhou, J., & Qian, H. M. (2017a). Pointwise frequency responses framework for stability analysis in periodically time-varying systems. International Journal of Systems Science, 48, 715–728. doi: 10.1080/00207721.2016.1212430
- Zhou, J., & Qian, H. M. (2017b). Stability analysis of sampled-data systems via open/closed-loop characteristic polynomials contraposition. International Journal of Systems Science, 48(9), 1941–1953. doi: 10.1080/00207721.2017.1290298
- Zhou, J., Qian, H. M., & Lu, X. B. (2017). An argument-principle-based framework for structural and spectral characteristics in linear dynamical systems. International Journal of Control, 90(12), 2598–2604. doi: 10.1080/00207179.2016.1260163