
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
We propose easily verifiable necessary and sufficient conditions for the linearisability of two-input systems by an endogenous dynamic feedback with a dimension of at most two.
Keywords:
1. Introduction
The concept of flatness has been introduced in control theory by Fliess, Lévine, Martin and Rouchon, see, e.g. Fliess et al. (Citation1992) and Fliess et al. (Citation1995). For flat systems, many feed-forward and feedback problems can be solved systematically and elegantly, see, e.g. Fliess et al. (Citation1995). Roughly speaking, a nonlinear control system of the form
with
states and
inputs is flat, if there exist m differentially independent functions
, where
denotes the kth time derivative of u, such that x and u can locally be parameterised by y and its time derivatives. For this flat parameterisation, we write
and refer to it as the parameterising map with respect to the flat output y. If the parameterising map is invertible, i.e. y and all its time derivatives which explicitly occur in the parameterising map can be expressed solely as functions of x and u, the system is exactly linearisable by static feedback. In this case, we call y a linearising output of the static feedback linearisable system. The static feedback linearisation problem has been solved completely, see Jakubczyk and Respondek (Citation1980) and Nijmeijer and van der Schaft (Citation1990). However, for flatness there do not exist easily verifiable necessary and sufficient conditions, except for certain classes of systems, including two-input driftless systems, see Martin and Rouchon (Citation1994) and systems which are linearisable by a onefold prolongation of a suitably chosen control, see Nicolau and Respondek (Citation2017). Necessary and sufficient conditions for
-flatness of control affine systems with two inputs and four states can be found in Pomet (Citation1997).
It is well known that every flat system can be rendered static feedback linearisable by an endogenous dynamic feedback, and conversely, every system linearisable by an endogenous dynamic feedback is flat. If a flat output is known, such a linearising feedback can be constructed systematically, see, e.g. Fliess et al. (Citation1999). In this contribution, we propose easily verifiable necessary and sufficient conditions for the linearisability of two-input systems by an endogenous dynamic feedback with a dimension of at most two. In Gstöttner et al. (Citation2021b), a sequential test for checking whether a two-input system is linearisable by an endogenous dynamic feedback with a dimension of at most two has been proposed recently. The main idea of the sequential test in Gstöttner et al. (Citation2021b) is to successively split off or add endogenous dynamic feedbacks to the system in such a way that eventually a static feedback linearisable system is obtained and it is shown that the proposed algorithm succeeds if and only if the original system is indeed linearisable by an at most two-dimensional endogenous dynamic feedback. However, a major drawback of this sequential test is that it requires straightening out involutive distributions, which from a computational point of view is unfavourable. The necessary and sufficient conditions which we propose in the present contribution overcome this computational drawback. Instead of a sequence of systems a certain sequence of distributions is constructed, based on which it can be decided whether the two-input system is linearisable by an endogenous dynamic feedback with a dimension of at most two or not. Constructing these distributions and verifying the proposed conditions require differentiation and algebraic operations only.
It turns out that systems which are linearisable by an endogenous dynamic feedback with a dimension of at most two are actually linearisable by a special kind of endogenous dynamic feedback, namely prolongations of a suitably chosen input after a suitable static feedback transformation has been applied to the system. A complete solution for the flatness problem for the class of two-input systems which are linearisable by a onefold prolongation of a suitably chosen control is provided in Nicolau and Respondek (Citation2016b). Two-input systems which are linearisable by a twofold prolongation of a suitable chosen control are considered in Nicolau and Respondek (Citation2016a). However, no complete solution for the flatness problem of this class of systems is provided in Nicolau and Respondek (Citation2016a) due to Assumption 2 therein. In Section 6, we apply our results to some examples, to none of which the results in Nicolau and Respondek (Citation2016a) are applicable. Normal forms for systems which are linearisable by a onefold prolongation can be found in Nicolau and Respondek (Citation2019), and normal forms for control affine two-input systems linearisable by a twofold prolongation have recently been proposed in Nicolau and Respondek (Citation2020). The present contribution is greatly influenced by all these results. The novelty of our contribution is easily verifiable necessary and sufficient conditions for linearisability by a twofold prolongation, covering also the cases to which the results in Nicolau and Respondek (Citation2016a) do not apply. The necessary and sufficient conditions which we propose in this contribution are also a major improvement over the in principal verifiable but computationally inefficient necessary and sufficient conditions in Gstöttner et al. (Citation2021b).
This paper is organised as follows. In Section 2, we introduce the notation used throughout the paper. In Section 3, some preliminaries regarding flatness of two-input systems are presented, and in Section 4, the sequential test from Gstöttner et al. (Citation2021b) is recapitulated briefly. The main results of this contribution are presented in Section 5, and in Section 6, they are applied to practical and academic examples.
2. Notation
Let be an n-dimensional smooth manifold, equipped with local coordinates
,
. Its tangent bundle is denoted by
, for which we have the induced local coordinates
with respect to the basis
. We make use of the Einstein summation convention. By
, we denote the
Jacobian matrix of
with respect to
. The k-fold Lie derivative of a function φ along a vector field v is denoted by
. Let v and w be two vector fields. Their Lie bracket is denoted by
, for the repeated application of the Lie bracket, we use the common notation
,
and
. Let
and
be two distributions. By
, we denote the distribution spanned by the Lie bracket of v with all basis vector fields of
, and by
the distribution spanned by the Lie brackets of all possible pairs of basis vector fields of
and
. The first derived flag of a distribution D is denoted by
and defined by
. The involutive closure of D is denoted by
and is the smallest involutive distribution which contains D. By
, we denote the Cauchy characteristic distribution of D. It is spanned by all vector fields
which satisfy
. Cauchy characteristic distributions are always involutive. The symbols ⊂ and
are used in the sense that they also include equality. An integer beneath the symbol ⊂ denotes the difference of the dimensions of the distributions involved, e.g.
means that
and
. We make use of multi-indices, in particular by
we denote the unique multi-index associated to a flat output of a system with two inputs, where
denotes the order of the highest derivative of
needed to parameterise x and u by this flat output, i.e.
. Furthermore, we define
with an integer c, and
.
3. Preliminaries
In this section, we summarise some results regarding flatness of two-input systems. Throughout, all functions and vector fields are assumed to be smooth and all distributions are assumed to have locally constant dimension, we consider generic points only. Consider a nonlinear two-input system of the form
(1)
(1) with
,
and
.
Definition 3.1
The two-input system (Equation1(1)
(1) ) is called flat if there exist two differentially independent functions
, j = 1, 2 and smooth functions
and
such that locally
(2)
(2) The functions
, j = 1, 2 are called the components of the flat output
.
Let be a flat output of (Equation1
(1)
(1) ). We define the multi-index
where
is the order of the highest derivative of the component
of the flat output which explicitly occurs in (Equation2
(2)
(2) ). This multi-index can be shown to be unique and with this multi-index, the flat parameterisation can be written in the form
(3)
(3) The flat parameterisation is a submersion (it degenerates to a diffeomorphism if and only if y is a linearising output). The difference of the dimensions of the domain and the codomain of (Equation3
(3)
(3) ) is denoted by d, i.e.
. In Nicolau and Respondek (Citation2016b) and Nicolau and Respondek (Citation2016a), the number
is called the differential weight of the flat output. (The differential weight of a flat output with difference d is thus given by n + 2 + d.) The difference d is the minimal dimension of an endogenous dynamic feedback needed to render (Equation1
(1)
(1) ) static feedback linearisable such that y forms a linearising output of the closed-loop system. Such a linearising endogenous feedback can be constructed systematically, see, e.g. Fliess et al. (Citation1999). If we have d = 0, the map (Equation3
(3)
(3) ) degenerates to a diffeomorphism and the system is static feedback linearisable with y being a linearising output. A flat output y is called a minimal flat output if its difference is minimal compared to all other possible flat outputs of the system. We define the difference d of a flat system to be the difference of a minimal flat output of the system. The difference d of a system therefore measures its distance from static feedback linearisability, i.e. d is the minimal possible dimension of an endogenous dynamic feedback needed to render the system static feedback linearisable.
For (Equation1(1)
(1) ), we define the distributions
and
,
on the state and input manifold
, where
.
Theorem 3.2
The two-input system (Equation1(1)
(1) ) is linearisable by static feedback if and only if all the distributions
are involutive and
.
For a proof of this theorem, we refer to Nijmeijer and van der Schaft (Citation1990). For a system which meets the conditions of Theorem 3.2, the linearising outputs can be computed as follows. Let s be the smallest integer such that . In case of
(i.e.
is of codimension 2), the sequence of involutive distributions is of the form
and linearising outputs are all pairs of functions
which satisfy
. However, if
(i.e.
is of codimension 1), the sequence is of the form
i.e. there exists an integer l from which on the sequence grows in steps of one. Linearising outputs are then all pairs of functions
which satisfy
and
.
The sequential test for flatness with proposed in Gstöttner et al. (Citation2021b), as well as the distribution test for flatness with
which we propose in this contribution, both rely on the following crucial result regarding flat two-input systems with
.
Theorem 3.3
A system (Equation1(1)
(1) ) with
can be rendered static feedback linearisable by d-fold prolonging a suitably chosen (new) input after a suitable input transformation
has been applied.
A proof of this result is provided in Appendix 1.
4. Sequential test
In this section, we briefly recapitulate the main idea of the necessary and sufficient condition for flatness with in form of the sequential test proposed in Gstöttner et al. (Citation2021b). For details, proofs and examples, we refer to Gstöttner et al. (Citation2021b). Let y be a minimal flat output with difference
of the system (Equation1
(1)
(1) ). It can be shown that the assumption
implies the existence of an input transformation
such that the flat parameterisation of the new inputs by the flat output y is of the form
,
(where
). Consider the system obtained by onefold prolonging
, i.e.
with the state
and the input
, and where
is the inverse of the transformation
. The flat output y of the original system is also a flat output of the prolonged system (and conversely, it can be shown that every flat output of the prolonged system is also a flat output of the original system). Since
, we have
and thus, the domain of the parameterising map of the prolonged system with respect to the flat output y is still of dimension
, but its codomain grew by one, i.e. y as a minimal flat output of the prolonged system has a difference of d−1 only. The main idea of the sequential test in Gstöttner et al. (Citation2021b) is to find such an input (they can indeed be found systematically), prolong it in order to obtain a system whose difference is d−1 (where
is the difference of the original system), and since by assumption
, after at most two such steps the procedure must yield a static feedback linearisable system. Otherwise, the original system must have had a difference of
.
When applying the sequential test to a system (Equation1(1)
(1) ), in every step a new system is derived by either splitting off a two-dimensional endogenous dynamic feedback or by adding a one-dimensional endogenous dynamic feedback (in form of a one-fold prolongation of a certain input). How the next system is derived from the current one is decided based on the distributions
and
of the current system. If
is involutive, it can be straightened out by a suitable state transformation
in order to obtain a decomposition of the system into the form
(4)
(4) The procedure is then continued with the subsystem
with the state
and the input
, i.e. we split off a two-dimensional endogenous dynamic feedback. It follows that
has the same flat outputs with the same differences as the original system.
If is non-involutive but
, it can be shown that the system allows an affine input representation (AI representation)
with a non-involutive input distribution
. Based on such an AI representation, an input transformation
, j, l = 1, 2 can be derived such that if the system indeed has a difference of
, the system obtained by onefold prolonging the new input
has a difference of d−1, i.e. in such a step a one-dimensional endogenous dynamic feedback is added to the system, and under the assumption
, it can be shown that the feedback modified system has a difference of d−1 only.
Finally, if is non-involutive and
, the system allows at most a so-called partial affine input representation (PAI representation)
This form was introduced in Schlacher and Schöberl (Citation2013). In Kolar et al. (Citation2016), it has been shown that the existence of a PAI representation is a necessary condition for flatness. For two input systems, an input transformation such that the system takes PAI form can be derived systematically (provided the system indeed allows a PAI representation, otherwise, we can conclude that the system is not flat). It can be shown that a system which does not allow an AI representation allows at most two fundamentally different PAI representations and that in case of
, the non-affine occurring inputs
of these possibly existing two PAI representations are the candidates for inputs whose flat parameterisation with respect to a minimal flat output involves derivatives up to order R−1 only. So in this case, the procedure is continued with the system obtained by onefold prolonging the non-affine occurring input
(if the system indeed allows two fundamentally different PAI representations, we have to continue the procedure with both of them, i.e. there may occur a branching point).
As already mentioned, the sequential test has the drawback that it requires straightening out involutive distributions to achieve decompositions of the form (Equation4(4)
(4) ). In fact, also the explicit computation of an input transformation such that a system takes PAI form requires straightening out an involutive distribution.
5. Main results
In this section, we present our main results, which are easily verifiable necessary and sufficient conditions for flatness with a difference of in the form of Theorem 5.1 for the case d = 2 and Theorem 5.2 for the case d = 1 below. These necessary and sufficient conditions overcome the computational drawbacks of the sequential test described in the previous section. Instead of a sequence of systems, a certain sequence of distributions is constructed. The distributions constructed when applying these theorems are actually closely related to the distributions
and
of the individual systems constructed in the sequential test on basis of which in the sequential test it is decided how the next system is computed from the current one. There is actually a one-to-one correspondence between the sequential test and the conditions of Theorems 5.1 and 5.2. One could prove these theorems via this one-to-one correspondence, however, in this contribution we provide self-contained proofs which do not rely on the sequential test. A detailed proof of Theorem 5.1 is provided in Section 7, and for Theorem 5.2, a brief sketch of a proof is provided in Section 8. As already mentioned, the case d = 1 has been solved completely in Nicolau and Respondek (Citation2016b). Below, we explain how our necessary and sufficient conditions for the case d = 1 in the form of Theorem 5.2 are related with those provided in Nicolau and Respondek (Citation2016b). The computation of flat outputs with
of systems which meet our conditions for flatness with
is addressed in Section 5.2.
Assume that the system (Equation1(1)
(1) ) is not static feedback linearisable. We then have the involutive distribution
and can calculate the distributions
,
where
is defined to be the smallest integer such that
is non-involutive (its existence is assured by the assumption that the system is not static feedback linearisable).
Theorem 5.1
The system (Equation1(1)
(1) ) is flat with a difference of d = 2 if and only if:
The distributions
,
Either
Either
Or
Or
Either
Or
There exists a minimal integer
The distributions
Either
Either
Or
All the distributions
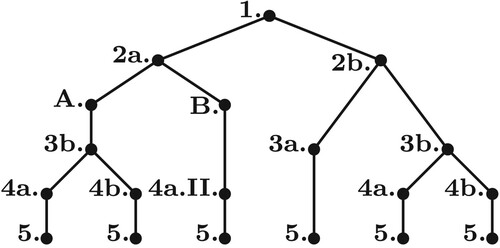
In Theorem 5.1, we have several junctions, which is graphically illustrated in Figure .
Figure 1. Overview of the possible paths in Theorem 5.1.
Regarding flatness with a difference of d = 1, we have the following result.
Theorem 5.2
The system (Equation1(1)
(1) ) is flat with a difference of d = 1 if and only if:
The distributions
Either
Either
Or
All the distributions
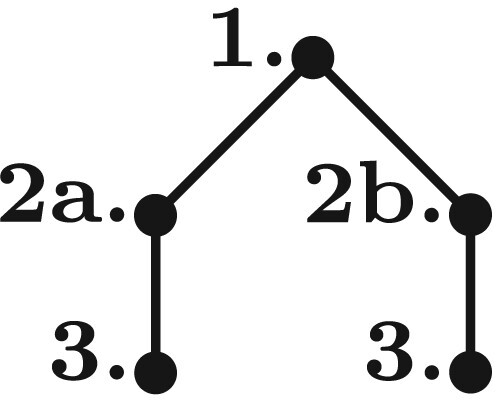
In Theorem 5.2, we have exactly one junction, which is graphically illustrated in Figure .
Figure 2. Overview of the possible paths in Theorem 5.2.
Note that the items 1. to 3. of Theorem 5.2 in fact coincide with the items 3b. to 5. of Theorem 5.1 when and
are replaced by
and
. In Nicolau and Respondek (Citation2016b), necessary and sufficient conditions for the case d = 1 are provided via Theorems 3.3 and 3.4 therein. These theorems are stated for the control affine case, but this is actually no restriction. It can be shown that the control affine system obtained by prolonging both inputs of a general nonlinear control system of the form (Equation1
(1)
(1) ), i.e.
with the state
and the input
is flat with a certain difference d if and only if the original system is flat with the same difference d. In fact, a flat output of the original system with a certain difference d is also a flat output of the prolonged system with the same difference d and vice versa. In Theorem 5.2, we have exactly one junction (see Figure ). This distinction of cases between
and
is motivated by the sequential test of the previous section (it corresponds to the distinction between AI form and PAI form in the sequential test). Our necessary and sufficient conditions for flatness with d = 1 as stated in Theorem 5.2 are very similar to those stated in Nicolau and Respondek (Citation2016b). The main difference is in fact that in Nicolau and Respondek (Citation2016b) a distinction of cases is made between
(Theorem 3.3 therein) and
(Theorem 3.4 therein), instead of a distinction of cases between
and
as it is done in Theorem 5.2.
It can easily be shown that all the distributions and all the conditions in Theorems 5.1 and 5.2 are invariant with respect to regular input transformations . Although the vector field
associated with (Equation1
(1)
(1) ) and the vector field
associated with the feedback modified system
, where
with the inverse
of the input transformation
, are in general only equal modulo
, the distributions
,
and
constructed from them in the above theorems coincide.
5.1. Verification of the conditions
All the conditions of Theorems 5.1 and 5.2 are easily verifiable and require differentiation and algebraic operations only. Item 2b. of Theorem 5.1 can be verified as follows. Choose any pair of vector fields such that
. Any vector field
,
can then be written as a non-trivial linear combination
. Since
and
, the condition
implies
and in turn
. Since for any
by construction we have
, the condition
implies
, which yields the necessary condition
(5)
(5) (where we have used that
, which can be shown based on the Jacobi identity). The following lemma states a crucial property of (Equation5
(5)
(5) ).
Lemma 5.1
The condition (Equation5(5)
(5) ) admits at most two independent non-trivial solutions
.
A proof of this lemma is provided in Appendix 1. (A similar result has been proven in Gstöttner et al. (Citation2020b) in the context of a certain structurally flat triangular form. The result which we prove here is more general.) Since (Equation5(5)
(5) ) admits at most two independent non-trivial solutions, there also exist at most two vector fields
which are not collinear modulo
and meet the above criterion. Since in
and
only the direction of
modulo
matters, there also exist at most two distinct such pairs of distributions.
5.2. Computation of flat outputs
Theorems 5.1 and 5.2 allow us to check whether a system is flat with a difference of . Regarding the computation of the corresponding flat outputs with
we have the following result.
Theorem 5.3
Assume that the system (Equation1(1)
(1) ) meets the conditions of Theorems 5.1 or 5.2. Flat outputs with d = 1 or d = 2 can then be determined from the sequence of involutive distributions
or
the same way as linearising outputs are determined from the sequence of involutive distributions
involved in the test for static feedback linearisability in Theorem 3.2.
Proof.
The sufficiency parts of the proofs of Theorems 5.1 and 5.2 are done constructively. Based on the distributions involved in the conditions of these theorems, for each case a certain coordinate transformation such that the system takes a structurally flat triangular form is derived. For details, see the sufficiency parts of the proofs of Theorems 5.1 and 5.2.
Remark 5.1
Above we have defined the difference d of a system as the difference of a minimal flat output and thus the minimal possible dimension of an endogenous dynamic feedback needed to render the system static feedback linearisable. Although a system with a difference of d = 1 may also be linearised by an endogenous dynamic feedback of a higher dimension, in particular a two-dimensional one, it is important to note that for such a system only the conditions of Theorem 5.2 are met but those of Theorem 5.1 are not met. As a consequence, the computation of flat outputs as described in Theorem 5.3 only yields minimal flat outputs.
It may happen that for the computation of flat outputs as stated in Theorem 5.3, a distribution which does not explicitly occur in Theorems 5.1 or 5.2 is needed. To be precise, if in Theorem 5.2 the conditions 2a apply and we have or
, we have to construct an involutive distribution
which satisfies
and
for the computation of flat outputs. Such a distribution always exists and except for the case
, it is also unique. The construction is as follows. In case of
, choose any function ψ whose differential
annihilates
and choose furthermore any pair of vector fields
which complete
to
, i.e. such that
. The distribution
can then be shown to be involutive. Different choices for ψ lead in general to different distributions
, but different choices for
have no effect. (A flat output with d = 1 is then formed by any pair of functions
satisfying
, where we can always choose one of the components equal to ψ since by construction
.)
In case of , the condition
implies the existence of a vector field
,
such that
. The direction of v is unique modulo
, and it follows that the distribution
constructed from it is involutive. (A flat output with d = 1 is then formed by any pair of functions
satisfying
and
.)
Similarly, if in Theorem 5.1 the conditions 4a (or 2a.B and 4a.II, in which case we define ) apply and we have
or
, we have to construct an involutive distribution
which satisfies
and
for the computation of flat outputs. This can be done as just explained for Theorem 5.2, simply replace
and
by
and
.
Finally, if in Theorem 5.1 the conditions 3a apply and we have , we have to construct an involutive distribution
which satisfies
and
for the computation of flat outputs. The construction is again the same as just explained for Theorem 5.2, simply replace
and
by
and
. Since we always have
in this case, the distribution
is unique.
6. Examples
In the following, we apply our results to several examples. Most of these examples are well-known benchmark examples for which flat outputs have been found on the basis of physical considerations (see, e.g. Martin et al. (Citation1996)) or constructive procedures (see, e.g. Schöberl and Schlacher (Citation2014)). Our results allow for a systematic computation of flat outputs for these examples. We focus on the case d = 2, as the novelty of this contribution are the results regarding the case d = 2, which also cover the cases which cannot be handled with the results in Nicolau and Respondek (Citation2016a) (none of the following examples meets Assumption 2 therein). It should again be pointed out that from a computational point of view, the necessary and sufficient conditions for flatness with in the form of Theorems 5.1 and 5.2 are a major improvement over the necessary and sufficient conditions in form of the sequential test proposed in Gstöttner et al. (Citation2021b).
6.1. VTOL Aircraft
Consider the model of a planar VTOL aircraft
(6)
(6) This system is also treated in e.g. Fliess et al. (Citation1999), Gstöttner et al. (Citation2020b), Gstöttner et al. (Citation2021b), Schöberl et al. (Citation2010) or Schöberl and Schlacher (Citation2011). The distributions
and
are involutive, but
is non-involutive, so we have
. With these distributions, item 1 of Theorem 5.1 is met. The Cauchy characteristic distribution of
follows as
and thus
. So we are in item 2b and have to construct a vector field
,
such that
with
and
. So we set
with arbitrary vector fields
which complete
to
, e.g.
,
, and determine
from (Equation5
(5)
(5) ), which in this particular case reads
(7)
(7) and admits the two independent solutions
,
and
,
, both with an arbitrary function
. We can choose
since only the direction of
matters, so we simply have
and
. With both of these vector fields we indeed have
, where
and
(8)
(8) and
(9)
(9) We thus have a branching point and have to continue with both of these distributions (we will be able to discard one of them in just a moment). The distributions
are non-involutive, so we are in item 3a. Both meet the condition 3a.I, i.e.
. However, 3a.II is only satisfied by
, for
we have
, so we can discard this branch and continue with
only, where for ease of notation we drop the second subscript from now on, i.e.
. According to item 3a.II, we have
. Continuing this sequence as stated in item 5, we obtain
, so the conditions of item 5 are also met and we conclude that the system (Equation6
(6)
(6) ) is flat with a difference of d = 2. In conclusion, the system meets the items 1, 2b, 3a, 5 (which corresponds to the 4th path from the left in Figure ).
According to Theorem 5.3, flat outputs with d = 2 of the VTOL aircraft can thus be computed from the distributions the same way as linearising outputs are determined from the sequence of involutive distributions involved in the test for static feedback linearisability. We have
, flat outputs with d = 2 are thus all pairs of functions
satisfying
. We have
and thus e.g.
,
.
The sufficiency part of the proof of Theorem 5.1 is done constructively. Based on the distributions involved in the conditions of the theorem, a coordinate transformation such that the system takes a structurally flat triangular form is derived. To aid understanding the sufficiency part of the proof of Theorem 5.1, we explicitly derive this coordinate transformation for this particular example. We have the following sequence of involutive distributions
where
and
is the unique involutive distribution determined by the conditions
and
. In order to straighten out all these distributions simultaneously, we apply the state transformation
In these coordinates, we have
which is of the form (Equation26
(26)
(26) ). Normalising the third equation by introducing
,
, we obtain
which is of the form (Equation25
(25)
(25) ). The top variables
,
form a flat output of (Equation6
(6)
(6) ) with a difference of d = 2. Similar triangular forms for the VTOL aircraft have been derived in Gstöttner et al. (Citation2020b) and in Nicolau and Respondek (Citation2020).
6.2. Academic Example 1
Consider the system
(10)
(10) also considered in Gstöttner et al. (Citation2020b), Gstöttner et al. (Citation2021b), Lévine (Citation2009) and Schöberl and Schlacher (Citation2014). The distribution
is involutive,
is non-involutive, so we have
and item 1 is met. We have
and thus
, so we are in item 2b and have to construct a vector field
, i.e.
, such that
where
and
. For that, we solve (Equation5
(5)
(5) ), which in the particular case yields
and admits the two independent solutions
,
and
,
, both with an arbitrary function
, e.g.
since only the direction of
matters. It can easily be checked that only the vector field
, obtained from the first solution, satisfies
, where
follows as
. The distribution
is non-involutive, so we are in item 3a. We have
. The conditions
and
are met. According to item 3a.II, we have
. Continuing this sequence as stated in item 5, we obtain
, so the conditions of item 5 are also met and we conclude that the system (Equation10
(10)
(10) ) is flat with a difference of d = 2. In conclusion, the system meets the items 1, 2b, 3a, 5 (which corresponds to the 4th path from the left in Figure ).
According to Theorem 5.3, flat outputs with d = 2 of the system (Equation10(10)
(10) ) can thus be computed from the distributions
the same way as linearising outputs are determined from the sequence of involutive distributions involved in the test for static feedback linearisability. However, in contrast to the previous example, not all the distributions needed for computing flat outputs explicitly occur in Theorem 5.1. We have
, from which we only find one component
of the flat outputs, i.e.
, from which e.g.
follows. In order to find a second component
, we have to complete the sequence to
, as stated below Theorem 5.3, and then we find
from
. We have
and it follows that
. We thus have
and in turn
, from which a possible second component follows as
. In conclusion, we have derived the flat output
,
.
Consider the following two examples:
(11)
(11) also treated in, e.g. Schöberl and Schlacher (Citation2010) and Schöberl and Schlacher (Citation2015). The first one of these two systems can be shown to be flat with a difference of d = 2, where again the items 1, 2b, 3a, 5 (which again corresponds to the 4th path from the left in Figure ) are met. Item 2b yields two different pairs of distributions
and
for this system, namely
,
and
,
. For both branches, the items 3a and 5 are met, and we obtain
and
as possible flat outputs with d = 2.
However, the second system in (Equation11(11)
(11) ) is an example which does not meet the conditions for flatness with
.Footnote2 Hence, we can conclude that if the system is flat, it must have a difference of
. (The system is indeed flat with a difference of d = 3, in e.g. Schöberl and Schlacher (Citation2015) a corresponding flat output with d = 3 has been derived.)
6.3. Academic Example 2
Consider the system
(12)
(12) The distribution
is involutive, but
is non-involutive, so we have
and item 1 is met. We have
, so we are in item 2b and have to construct a vector field
, i.e.
, such that
where
and
. For that, we solve (Equation5
(5)
(5) ), which in the particular case yields
and has the up to a multiplicative factor unique solution
,
. The vector field
obtained from this solution indeed meets
with
. The distribution
is involutive, so we are in item 3b. The distribution
is non-involutive, i.e.
and item 3b.II is also met. We have
, so we are in item 4b. According to this item, we have
, which evaluates to
and is indeed involutive. Continuing this sequence as stated in item 5, we obtain
, so the conditions of item 5 are also met and we conclude that the system (Equation12
(12)
(12) ) is flat with a difference of d = 2. In conclusion, the system meets the items 1, 2b, 3b, 4b, 5 (which corresponds to the 6th path from the left in Figure ).
According to Theorem 5.3, flat outputs with d = 2 of this system are all pairs of functions satisfying
. We have
, and thus, e.g.
and
.
6.4. Coin on a moving table
Consider the following model of a coin rolling on a rotating table:
(13)
(13) taken from Kai (Citation2006) and also considered in, e.g. Li et al. (Citation2013) and Li et al. (Citation2016). The distribution
is involutive,
is non-involutive, so we have
and item 1 is met. We have
, so we are in item 2a. We furthermore have
(the involutive closure of
is given by
), so we are in the subcase 2a.B. The first derived flag of
is given by
its Cauchy characteristic distribution follows as
and the condition
is indeed met. By definition we have
and have to continue with item 4a.II. The item 4a.II is indeed met with
and thus, also 5 is met (with
), proving that the system is flat with a difference of d = 2. In conclusion, the system meets the items 1, 2a.B, 4a.II, 5 (which corresponds to the 3rd path from the left in Figure ).
According to Theorem 5.3 (see also below Theorem 5.3), flat outputs with d = 2 are all pairs of functions satisfying
, where
is an arbitrary involutive distribution satisfying
with
. To construct such a distribution
, we first choose an arbitrary function ψ whose differential
annihilates
, e.g.
, and a pair of vector fields
which completes
to
, e.g.
,
. A possible distribution
is then given by
, which yields
,
as a possible flat output.
Remark 6.1
Theorems 5.1 and 5.2 together cover the whole class of two-input systems which are linearisable by an at most two-dimensional endogenous dynamic feedback. On the basis of the above examples, we have demonstrated that the conditions of these theorems are indeed systematically verifiable and require differentiation and algebraic operations only. Of course it is possible to try simpler sufficient conditions for flatness first. For example, for the coin on a moving table example, the same flat output could be obtained by applying the procedure proposed in Fossas and Franch (Citation2000). That is, the system (Equation13(13)
(13) ) becomes static feedback linearisable by a twofold prolongation of the original input
. The flat output derived above is a linearising output of this prolonged system.
7. Proof of Theorem 5.1
Necessity
Consider a two-input system of the form (Equation1(1)
(1) ) and assume that it is flat with a difference of d = 2. Let
be defined as in Theorem 5.1, i.e. the smallest integer such that
is non-involutive (if
would not exist, the system would be static feedback linearisable, which is a contradiction to the assumption that d = 2). According to Theorem 3.3, there exists an input transformation
with inverse
such that the system obtained by twofold prolonging the new input
, i.e. the system
(14)
(14) with the state
and the input
, is static feedback linearisable. Therefore, according to Theorem 3.2, with the vector field
the distributions
(15)
(15) are all involutive (that the integer s in the last line of (Equation15
(15)
(15) ) coincides with s in item 5 is shown later). Some simplifications can be made, i.e. there exist simpler bases for these distributions, as the following lemma asserts. The proposed bases reveal useful relations between the distributions
and
.
Lemma 7.1
The distributions (Equation15(15)
(15) ) can be simplified to either
(16)
(16)
or
(17)
(17)
Remark 7.1
It follows from the proof of Lemma 7.1, which is provided in Appendix 2, that in case of we always have the form (Equation16
(16)
(16) ). The form (Equation17
(17)
(17) ) is only relevant if in the case
we have
. In all other cases, the distributions
are indeed of the form (Equation16
(16)
(16) ).
Necessity of Item 1. From the assumption (i.e. the assumption that the system has no redundant inputs), it immediately follows that
, which in case of
already shows the necessity of item 1. For
, the involutive distributions
can always be written in the form (Equation16
(16)
(16) ) (see Remark 7.1), based on which
,
can be shown by contradiction. Assume that
for some i where
and let
be the smallest integer such that
. Thus
and
are collinear modulo
. Both of these vector fields being contained in
, i.e.
and
, contradicts with
being non-involutive, it would lead to
, i.e. the sequence would stop growing from
on.
If , we have (see (Equation16
(16)
(16) ))
(18)
(18) where
follows from the assumption
since by construction
. Since
, we either have
or
, i.e. the vector field
in (Equation18
(18)
(18) ) either completes
to
, or it is contained in
. The case
would lead to
, which would imply that
is involutive, contradicting with
being non-involutive. Similarly, the case
would lead to
, which would again imply that
is involutive, again contradicting with
being non-involutive.
If , we necessarily have
(since by assumption
and
), which leads to
. From the involutivity of
it follows that
, which together with the involutivity of
and the fact that
implies that
(recall that
). From the Jacobi identity
it follows that
, which because of the involutivity of
implies that
. Since also
(which can be shown based on the Jacobi identity), it follows that
which would imply that
is involutive, contradicting with
being non-involutive and completing the proof of the necessity of item 1.
In the following, we show the necessity of the remaining items. We distinguish between two cases, namely the case that the involutive distributions in (Equation15
(15)
(15) ) can be written in the form (Equation16
(16)
(16) ) and the case that these distributions can only be written in the form (Equation17
(17)
(17) ). As already mentioned, the form (Equation17
(17)
(17) ) is only relevant if in the case
we have
, in all other cases, the distributions
are indeed of the form (Equation16
(16)
(16) ). We treat this special case in Appendix 1 so that for the rest of the proof we can assume that the involutive distributions
in (Equation15
(15)
(15) ) can be written in the form (Equation16
(16)
(16) ).
Necessity of Item 2. We either have or
. We have to show the necessity of item 2a under the assumption that
and the necessity of item 2b under the assumption that
.
The case
We have to show the necessity of item 2a. We have (see (Equation16
(16)
(16) )) and since
is involutive, it follows that
. In turn, we either have
, which corresponds to item 2a.A, or
, which corresponds to 2a.B. We have to distinguish between these two possible subcases. In either subcase, the following result, proven in Appendix 2, will be useful.
Lemma 7.2
In the case d = 2 with we have
.
Let us first consider the subcase , which corresponds to item 2a.A. We have to show that
. We necessarily have
, since
would imply flatness with a difference of d = 1,Footnote3 which contradicts with the assumption that d = 2. Since
(see Lemma 7.2), the condition holds if and only if
, which can be shown by contradiction. Assume that
and thus
. Based on the Jacobi identity it can then be shown that this would imply
. However, since
, this would in turn imply that the system contains an autonomous subsystem, which is in contradiction with the assumption that the system is flat.Footnote4 Thus
and
indeed holds. By definition we have
in this case, which evaluates to
.
Next, let us consider the subcase , which corresponds to item 2a.B. According to Lemma 7.2, we have
, which is non-involutive since by assumption
. Note that
can be written in the form
From the involutivity of
and the fact that
it follows that
. Based on the Jacobi identity, it can be shown that
. The non-involutivity of
implies that
. We thus have
, from which the necessity of the condition
follows immediately. By definition we have
in this case, which is of course non-involutive and evaluates to
.
The case
We have to show the necessity of item 2b, i.e. we have to show that there exists a vector field ,
such that the distributions
and
meet
. Let us show that the vector field
and the distributions
and
derived from it meet these criteria. The vector field
meets
,
(the latter must hold since
would imply
), and yields
and
. Due to the involutivity of
and the involutivity of
, it follows that
and
, and hence
. Therefore,
,
and
.
Necessity of Item 3. The distribution of item 2b can either be involutive or non-involutive. We have to show the necessity of item 3a under the assumption that
of item 2b is non-involutive, and the necessity of item 3b under the assumption that
of item 2b is involutive.
In item 2a.A, the distribution is by construction involutive, so we have to show the necessity of item 3b in this case. (In item 2a.B, the item 3 is not relevant as it is skipped in the corresponding conditions.)
of item 2b being non-involutive
We have to show the necessity of item 3a. From (see (Equation16
(16)
(16) )), it immediately follows that
and in turn the necessity of the condition
, which corresponds to 3a.I follows.Footnote5
Next, let us show the necessity of item 3a.II, i.e. . Recall that we have
and
. Since
, the condition holds if and only if
, which can be shown by contradiction. Assume that
and thus
. Based on the Jacobi identity, it can then be shown that this would imply
. However, since
, this would in turn imply that the system contains an autonomous subsystem, which is in contradiction with the assumption that the system is flat. By definition we have
in this case.
of item 2b or of item 2a.A being involutive
In this case, the distributions are defined and we have to show the necessity of item 3b.
Let us first show the necessity of 3b.I, i.e. there necessarily exists an integer such that
is non-involutive. We show the existence of
by contradiction. Assume that all the distributions
are involutive. If there does not exist an integer s such that
, then there exists an integer l such that
, implying that the system contains an autonomous subsystem and contradicting with the assumption that the system is flat. If all the distributions
are involutive and there exists an integer s such that
, it can be shown that the system would meet the conditions for flatness with d = 1, which contradicts with the assumption that d = 2.
To show the condition on the dimensions of the distributions , note that actually in any case, i.e. independently of whether 2a.A or 2b applies, we have
. Indeed, in 2a.A by definition we have
, which turned out to be
. In 2b, we found that
(assumed to be involutive here) and thus again
. For the distributions
,
we thus have
(19)
(19) and with the distributions (Equation16
(16)
(16) ), they are related via
(20)
(20) The necessity of the condition
,
can now be shown by contradiction. Assume that
for some i where
and let
be the smallest integer such that
. We have
and by assumption
and
. Thus
and
are collinear modulo
. Both of these vector fields being contained in
, contradicts with
being non-involutive, it would lead to
, i.e. the sequence would stop growing from
on. If
, then due to
(see (Equation20
(20)
(20) )), we have
and it follows that also
for i>l. The involutivity of
would then imply that
is involutive, which again contradicts with
being non-involutive.
If , we necessarily have
and thus
and in turn
and it follows that also
for i>l. The involutivity of
would then imply that
is involutive, which again contradicts with
being non-involutive. Thus
and
cannot be collinear modulo
for any
which shows that
for
.Footnote6
Necessity of Item 4. For the distributions and
of item 3b, we either have
or
. We have to show the necessity of item 4a under the assumption that
, and the necessity of item 4b under the assumption that
. Furthermore, under the assumption that the conditions of 2a.B are met, we have to show the necessity of item 4a.II.
The case
We have to show the necessity of item 4a. The distribution is by assumption non-involutive. Since
(see (Equation20
(20)
(20) )) and
is involutive, it follows that
, and thus we have
, which shows the necessity 4a.I.
For , there are no additional conditions whose necessity has to be shown. For
, the necessity of
has to be shown. Since
, the condition holds if and only if
, which can be shown by contradiction. Assume that
and thus
. Based on the Jacobi identity, it can then be shown that this would imply
, which would in turn imply that the system contains an autonomous subsystem and contradict with the system being flat. By definition we have
in this case.
The necessity of item 4a.II under the assumption that the conditions of 2a.B are met can be shown analogously. By definition we have (where
), which according to Lemma 7.2 evaluates to
and is by assumption non-involutive. We have
(see (Equation16
(16)
(16) )), from which
follows. For
, there are again no additional conditions whose necessity has to be shown. For
, the necessity of
can be shown analogously as above. By definition we have
in this case.
The case
We have to show the necessity of item 4b, i.e. we have to show that the distribution , defined as
, is involutive. Regarding the Cauchy characteristic distribution of
we have the following result, a proof of which is provided in Appendix 2.
Lemma 7.3
Assume that . If
, the Cauchy characteristic distribution of
is given by
and if
, it is given by
in both cases with some function
.
Recall that we have and that
. Due to Lemma 7.3, for the distribution
we thus in any case have
and hence
, implying that
is indeed involutive.
Necessity of Item 5. In conclusion, in 3a, i.e. for being non-involutive (in which case we define
), we have
. In 4a, we have
, and in 4b, we have
. With
, in any case we thus have
. To complete the necessity part of the proof we have to show that all the distributions
,
are involutive and that there exists an integer s such that
, which is indeed the case since in any case it follows that the distributions
and
are related via
and thus
Sufficiency
Consider a two-input system of the form (Equation1(1)
(1) ) and assume that it meets the conditions of Theorem 5.1. To cover all the possible paths which are illustrated in Figure , we again have to distinguish between several cases. The distinction is done based on the difference of the integers
and
, i.e. the indices of the first non-involutive distribution
and the second non-involutive distribution
. The cases in which
and thus
is involutive are similar and can be proven together. The cases in which
is involutive but
is non-involutive are also similar and can be proven together. The remaining case in which
is non-involutive (in which case we define
) is proven separately. For each case, a coordinate transformation such that the system takes a certain structurally flat triangular form can be derived. For the cases
and
we derive such a transformation explicitly. The case
can be handled analogously, it is in fact slightly simpler than the other two cases and we do not treat this case in detail here. In each case, we will need the following result, proven in Appendix 2.
Lemma 7.4
Let be an involutive distribution and
a non-involutive distribution on
such that
,
and
and such that for some vector field f on
we have
and either
or
. Then, there exists an involutive distribution
such that
and
. In case of
, the distribution
is unique.
The case : In total, four different subcases are possible, namely
2a.A followed by 4a, corresponding to
2a.A followed by 4b, corresponding to
2b followed by 4a, corresponding to
2b followed by 4b, corresponding to
In any of these cases, we have the following sequence of involutive distributions:
(21)
(21) In the cases in which
and/or
, the existence of
and/or
is guaranteed by Lemma 7.4. That the dimensions of the distributions in the inclusion
indeed differ by two follows from
in this case.
In case of , the distribution
occurs explicitly in the corresponding conditions of Theorem 5.1 and
follows from the assumption that
is involutive in this case. Indeed, we have
, from which
follows. Similarly, in case of
,
can be shown as follows. By construction, we have
and
, which are by assumption involutive and
is non-involutive. It is immediate that
necessarily contains a vector field
,
, since otherwise we would have
, leading to
and contradicting with
being non-involutive. On the other hand,
can only contain one vector field which is not already contained in
, since otherwise
which again contradicts with
being non-involutive. Thus
where
,
. Therefore, we have
. It is immediate that
(otherwise
). Thus we have
. That
follows readily from these considerations in this case.
Based on the distributions (Equation21(21)
(21) ), a coordinate transformation such that in the new coordinates the system takes the structurally flat triangular form
can be derived, where
,
,
(in case of
the variables
are actually inputs instead of states). For
it follows that
forms a flat output with a difference of d = 2. If
, we necessarily have
but
for some
. In this case, a flat output with a difference of d = 2 is given by
where
is an arbitrary function such that
. Furthermore, it follows that there cannot exist a flat output with
. The conditions of Theorem 3.2 cannot be met due to the non-involutivity of
and it can easily be shown that the conditions of Theorem 5.2 cannot be met either.
The case : In total, three different subcases are possible, namely
2a.B followed by 4a.II, corresponding to
2b followed by 4a, corresponding to
2b followed by 4b, corresponding to
In all of these cases, we have the following sequence of involutive distributions:
(22)
(22) Let us show this in detail for the three possible cases (a)–(c).
(a) In 2a.B, only is defined explicitly. We set
in this case. We have the following results on this Cauchy characteristic distribution, see Appendix 2 for a proof.
Lemma 7.5
Assume that the conditions of item 2a.B are met, i.e. ,
and
. Then,
and
.
By definition, we have and according to Lemma 7.5 we have
with
. Therefore, Lemma 7.4 applies, which guarantees the existence of a distribution
such that
and
(
is unique if and only if
).
(b) In 2b, the distribution occurs explicitly, the existence of an involutive distribution
such that
and
is guaranteed by Lemma 7.4 (
is unique if and only if
).
(c) In 2b and 4b, the distributions and
occur explicitly. That
as well as
and
can be shown the same way as above for the case
.
Based on the distributions (Equation22(22)
(22) ), we will derive a coordinate transformation such that in the new coordinates the system takes the structurally flat triangular form
(23)
(23) where
,
,
(in case of
the variables
are actually inputs instead of states) from which again flatness with a difference of d = 2 can be deduced. For
it follows that
forms a flat output with a difference of d = 2. If
, we necessarily have
but
for some
. In this case, a flat output with a difference of d = 2 is given by
where
is an arbitrary function such that
.
The case : In this case, by assumption the conditions of item 2b and item 3a are met. We have the following sequence of involutive distributions (we assume
here, see Remark 7.4 below for the cases
)
(24)
(24) That
is involutive follows from the fact that
in this case. (Indeed, since
is non-involutive we necessarily have
. By construction we have
and
, which thus implies
.) The existence of
such that
and
is guaranteed by Lemma 7.4 (and
is unique since
is not possible as it would imply
). Based on this sequence, we will derive a coordinate transformation such that in the new coordinates the system takes the structurally flat triangular form
(25)
(25) where
,
,
(in case of
the variables
are actually inputs instead of states) from which again flatness with a difference of d = 2 can be deduced. For
it follows that
forms a flat output with a difference of d = 2. If
, we necessarily have
but
for some
. In this case, a flat output with a difference of d = 2 is given by
where
is an arbitrary function such that
.
The case in detail: Apply a change of coordinates
such that all the distributions (Equation22
(22)
(22) ) get straightened out simultaneously, i.e. such that
where
, and
where
, and
where
and
. Since by construction we have
for
as well as
for
, it follows that in the new coordinates the vector field f has the triangular form
From
,
and
,
, it follows that the rank conditions
,
for
and
for
, hold.
Since , it follows that
. The non-involutivity of
implies that at least one of the components of
must explicitly depend on
(otherwise
would be involutive as it would be straightened out in the
coordinates). Without loss of generality we can thus assume that
explicitly depends on
, (if not, permute
and
and/or
and
). We can thus introduce
with all the other coordinates left unchanged (in case of
this is actually an input transformation instead of a state transformation), resulting in
(where
). In any case, we have
.Footnote7 Thus, a linear combination of
and
is contained in
, implying that
and thus,
and
are actually independent of
, so we have
and
Furthermore, we have
and thus
and since
, a linear combination of
and
is contained in
, implying that
and thus,
is actually independent of
, so we have
and
must explicitly depend on
. Because of
we have
, from which it follows that
explicitly depends on
. (The non-involutivity of
furthermore implies that
and/or
.) So in the just constructed coordinates, the system equations indeed take the triangular structure (Equation23
(23)
(23) ).
Remark 7.2
In case (a), i.e. if , by successively introducing new coordinates in (Equation23
(23)
(23) ) from top to bottom, the system would take the triangular from proposed in Gstöttner et al. (Citation2021a). The cases (b) and (c) are not covered by the results in Gstöttner et al. (Citation2021a).
The case in detail: Apply a change of coordinates
such that all the distributions (Equation24
(24)
(24) ) get straightened out simultaneously, i.e. such that
where
, and
where
, and
where
and
. Since by construction we have
for
as well as
for
, it follows that in the new coordinates the vector field f has the triangular form
(26)
(26) From
,
and
,
, it follows that the rank conditions
,
for
and
for
, hold.
It follows that at least one component of explicitly depends on
. Indeed, we have
. If
would be independent of
, we would obtain
and in turn
, which contradicts with
being non-involutive. Without loss of generality, we can thus assume that
explicitly depends on
(if not, permute
and
and/or
and
). We can thus introduce
with all the other coordinates left unchanged (in case of
this is actually an input transformation instead of a state transformation), resulting in
(where
). Since
, it follows that
yields exactly one new direction which is not already contained in
and thus,
and therefore,
is actually independent of
and
, i.e. we actually have
Since
, it follows that
explicitly depends on
. Similarly, we have
, from which it follows that
yields exactly one new direction which is not already contained in
and thus,
and therefore,
is actually independent of
, i.e. we actually have
Since
, it follows that
explicitly depends on
. So in the just constructed coordinates, the system equations indeed take the triangular structure (Equation25
(25)
(25) ). (Note that the involutivity of
implies that the functions
and
depend on
in an affine manner and that furthermore
. The non-involutivity of
implies that
.)
Remark 7.3
By successively introducing new coordinates in (Equation25(25)
(25) ) from top to bottom, the system would take the triangular from proposed in Gstöttner et al. (Citation2020b).
Remark 7.4
In case of , the variables
would correspond to inputs of the system and the variables
would not exist. Consider the system obtained by one-fold prolonging both of its inputs, i.e.
with the state
and the input
. By assumption, the original system meets the conditions of Theorem 5.1 with
. It can easily be shown that this implies that the prolonged system also meets the conditions of Theorem 5.1, but with
. (The distributions involved in the conditions of Theorem 5.1 when applying it to the original system and when applying it to the prolonged system differ only by
.) The prolonged system can thus be transformed into the corresponding triangular form (Equation25
(25)
(25) ) as explained above, i.e. the prolonged system can be proven to be flat with a difference of d = 2. It can be shown that the prolonged system is flat with a certain difference d if and only if the original system is flat with the same difference d. In fact, a flat output of the original system with a certain difference d is also a flat output of the prolonged system with the same difference d and vice versa. The prolonged system being flat with a difference of d = 2 thus implies that the original system is flat with a difference of d = 2.
8. Brief sketch of the proof of Theorem 5.2
Necessity
Consider a two-input system of the form (Equation1(1)
(1) ) and assume that it is flat with a difference of d = 1. According to Theorem 3.3, there exists an input transformation
with inverse
such that the system obtained by onefold prolonging the new input
, i.e. the system
(27)
(27) with the state
and the input
, is static feedback linearisable. The necessity of the conditions of Theorem 5.2 can then be shown on basis of the involutive distributions
, where
and
, which are involved in the test for static feedback linearisability of the prolonged system (see Theorem 3.2).
The necessity part of the proof is in fact very similar to the proof of the necessity of the items 3b to 5 of Theorem 5.1. As we have already noted above, these items in fact coincide with the items 1 to 3 of Theorem 5.2 when and
are replaced by
and
.
Sufficiency
Consider a two-input system of the form (Equation1(1)
(1) ) and assume that it meets the conditions of Theorem 5.2. In any of the two cases, i.e. independent of
(which corresponds to 2a) or
(which corresponds to 2b), it follows that we have the following sequence of involutive distributions:
(28)
(28) based on which a change of coordinates such that in the new coordinates the system takes the structurally flat triangular form
(29)
(29) can be derived (in case of
, the variables
are actually inputs instead of states), from which it follows that the system is indeed flat with a difference of d = 1.
Remark 8.1
In case of 2a, i.e. if , by successively introducing new coordinates in (Equation29
(29)
(29) ) from top to bottom, the system would take the triangular from proposed in Gstöttner et al. (Citation2021a).
9. Conclusion
We have derived necessary and sufficient conditions for the linearisability of two-input systems by an endogenous dynamic feedback with a dimension of at most two. Verifying these conditions requires differentiation and algebraic operations only. Further research will be devoted to two-input systems which are linearisable by a three-dimensional endogenous dynamic feedback. Furthermore, we aim to extend results of this paper to systems with more than two inputs in future work. The class of two-input systems linearisable by an at most two-dimensional endogenous dynamic feedback overlaps with several other classes of flat systems which have been considered in the literature, e.g. the class of flat two-input driftless systems (see Martin and Rouchon (Citation1994)) or the class of flat control affine systems with four states and two inputs considered in Pomet (Citation1997). Elaborating in detail the relation of the conditions for flatness for these classes of systems with the conditions we have proposed in this paper also gives rise to future work.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Correction Statement
This article has been republished with minor changes. These changes do not impact the academic content of the article.
Additional information
Funding
Notes
1 There exist at most two distinct such pairs of distributions and
, the construction is explained below. If indeed two pairs exist, a branching point occurs and we have to continue with both of them.
2 We have and
. The conditions of Theorem 5.2 are not met since
of item 2b is non-involutive. The conditions of Theorem 5.1 are not met since
, which violates 3a.I.
3 Indeed, for with
and
, the conditions of Theorem 5.2 would be met.
4 The autonomous subsystems occurs explicitly in coordinates in which the distribution is straightened out (see also Theorem 3.49 in Nijmeijer and van der Schaft (Citation1990)).
5 Note that we necessarily have . Indeed, we have
, and we have just shown that necessarily
. Thus,
and
would thus imply
, which is in contradiction with
being non-involutive.
6 In case of 2a.A, there does not explicitly occur a distribution , so for
, we cannot argue as above. However, in this case we have
and therefore,
follows immediately from
and
.
7 In 2b, this follows immediately from the definition of , for the case 2a.B, it follows from Lemma 7.5.
8 Note that we have .
9 It is immediate that , as it would either lead to
or
, which contradicts with
being non-involutive.
10 Note that there is no need to explicitly construct the vector fields , j = 1, 2 for deriving the distribution
corresponding to a certain choice ψ. Indeed, any vector fields
which complete
to
can be written as a linear combination
with some functions
and
. A straight forward calculation shows that
and thus
, i.e. the particular choice for the vector fields
has no effect as long as they complete
to
.
11 It follows that the direction of the vector field is modulo
uniquely determined by the conditions
,
,
and thus, the distribution
is unique in this case. Indeed, assume that there would exist another such vector field
,
, which is modulo
not collinear with v and still satisfies
. Then, we would have
and in turn
, which is in contradiction with
.
References
- Fliess, M., Lévine, J., Martin, P., & Rouchon, P. (1992). Sur les systèmes non linéaires différentiellement plats. Comptes rendus de l'Académie des sciences. Série I, Mathématique, 315, 619–624.
- Fliess, M., Lévine, J., Martin, P., & Rouchon, P. (1995). Flatness and defect of non-linear systems: Introductory theory and examples. International Journal of Control, 61(6), 1327–1361. https://doi.org/10.1080/00207179508921959
- Fliess, M., Lévine, J., Martin, P., & Rouchon, P. (1999). A Lie–Bäcklund approach to equivalence and flatness of nonlinear systems. IEEE Transactions on Automatic Control, 44(5), 922–937. https://doi.org/10.1109/9.763209
- Fossas, E., & Franch, J. (2000). Linearization by prolongations and quotient of modules, a case study: The vertical take off and landing aircraft. In Proceedings wses international conference on applied and theoretical mathematics (pp. 1961–1965).
- Gstöttner, C., Kolar, B., & Schöberl, M. (2020a). On the linearization of flat two-input systems by prolongations and applications to control design. IFAC-PapersOnLine, 53(2), 5479–5486. 21st IFAC World Congress. https://doi.org/10.1016/j.ifacol.2020.12.1553
- Gstöttner, C., Kolar, B., & Schöberl, M. (2020b). A structurally flat triangular form based on the extended chained form. International Journal of Control. https://doi.org/10.1080/00207179.2020.1841302
- Gstöttner, C., Kolar, B., & Schöberl, M. (2021a). On a flat triangular form based on the extended chained form. IFAC-PapersOnLine, 54(9), 245–252. 24th International symposium on mathematical theory of networks and systems (MTNS). https://doi.org/10.1016/j.ifacol.2021.06.082
- Gstöttner, C., Kolar, B., & Schöberl, M. (2021b). A finite test for the linearizability of two-input systems by a two-dimensional endogenous dynamic feedback. arXiv:2011.06929 [math.DS]. ECC 2021.
- Jakubczyk, B., & Respondek, W. (1980). On linearization of control systems. Bulletin L'Académie Polonaise des Science, Série des Sciences Mathématiques, 28, 517–522.
- Kai, T. (2006). Extended chained forms and their application to nonholonomic kinematic systems with affine constraints: control of a coin on a rotating table. In Proceedings of the 45th IEEE conference on decision and control (pp. 6104–6109). https://doi.org/10.1109/CDC.2006.377186
- Kolar, B., Schöberl, M., & Schlacher, K. (2016). Properties of flat systems with regard to the parameterization of the system variables by the flat output. IFAC-PapersOnLine, 49(18), 814–819. 10th IFAC symposium on nonlinear control systems NOLCOS 2016. https://doi.org/10.1016/j.ifacol.2016.10.266
- Lévine, J. (2009). Analysis and control of nonlinear systems: a flatness-based approach. Springer.
- Li, S., Nicolau, F., & Respondek, W. (2016). Multi-input control-affine systems static feedback equivalent to a triangular form and their flatness. International Journal of Control, 89(1), 1–24. https://doi.org/10.1080/00207179.2015.1056232
- Li, S., Xu, C., Su, H., & Chu, J. (2013). Characterization and flatness of the extended chained system. In Proceedings of the 32nd Chinese control conference (pp. 1047–1051). IEEE.
- Martin, P., Devasia, S., & Paden, B. (1996). A different look at output tracking: control of a vtol aircraft. Automatica, 32(1), 101–107. https://doi.org/10.1016/0005-1098(95)00099-2
- Martin, P., & Rouchon, P. (1994). Feedback linearization and driftless systems. Mathematics of Control, Signals and Systems, 7(3), 235–254. https://doi.org/10.1007/BF01212271
- Nicolau, F., & Respondek, W. (2016a, December). Flatness of two-input control-affine systems linearizable via a two-fold prolongation. In 2016 IEEE 55th conference on decision and control (CDC) (pp. 3862–3867). https://doi.org/10.1109/CDC.2016.7798852
- Nicolau, F., & Respondek, W. (2016b). Two-input control-affine systems linearizable via one-fold prolongation and their flatness. European Journal of Control, 28, 20–37. https://doi.org/10.1016/j.ejcon.2015.11.001
- Nicolau, F., & Respondek, W. (2017). Flatness of multi-input control-affine systems linearizable via one-fold prolongation. SIAM Journal on Control and Optimization, 55(5), 3171–3203. https://doi.org/10.1137/140999463
- Nicolau, F., & Respondek, W. (2019). Normal forms for multi-input flat systems of minimal differential weight. International Journal of Robust and Nonlinear Control, 29(10), 3139–3162. https://doi.org/10.1002/rnc.v29.10
- Nicolau, F., & Respondek, W. (2020). Normal forms for flat two-input control systems linearizable via a two-fold prolongation. IFAC-PapersOnLine, 53(2), 5441–5446. 21st IFAC World Congress. https://doi.org/10.1016/j.ifacol.2020.12.1545
- Nijmeijer, H., & van der Schaft, A. (1990). Nonlinear dynamical control systems. Springer.
- Pomet, J. (1997). On dynamic feedback linearization of four-dimensional affine control systems with two inputs. ESAIM: Control, Optimisation and Calculus of Variations, 2(1997), 151–230. https://doi.org/10.1051/cocv:1997107
- Schlacher, K., & Schöberl, M. (2013). A jet space approach to check Pfaffian systems for flatness. In 52nd IEEE conference on decision and control (pp. 2576–2581). https://doi.org/10.1109/CDC.2013.6760270
- Schöberl, M., Rieger, K., & Schlacher, K. (2010). System parametrization using affine derivative systems. In Proceedings 19th international symposium on mathematical theory of networks and systems (MTNS) (pp. 1737–1743).
- Schöberl, M., & Schlacher, K. (2010). On parametrizations for a special class of nonlinear systems. IFAC Proceedings Volumes, 43(14), 1261–1266. 8th IFAC symposium on nonlinear control systems. https://doi.org/10.3182/20100901-3-IT-2016.00051
- Schöberl, M., & Schlacher, K. (2011). On calculating flat outputs for Pfaffian systems by a reduction procedure – demonstrated by means of the VTOL example. In 2011 9th IEEE international conference on control and automation (ICCA) (pp. 477–482). https://doi.org/10.1109/ICCA.2011.6137922
- Schöberl, M., & Schlacher, K. (2014). On an implicit triangular decomposition of nonlinear control systems that are 1-flat – a constructive approach. Automatica, 50(6), 1649–1655. https://doi.org/10.1016/j.automatica.2014.04.007
- Schöberl, M., & Schlacher, K. (2015). On geometric properties of triangularizations for nonlinear control systems. In M. K. Camlibel, A. A. Julius, R. Pasumarthy, and J. M. Scherpen (Eds.), Mathematical control theory i (pp. 237–255). Springer International Publishing.
Appendices
Appendix 1. Supplements
A.1. Proof of Theorem 3.3
In Gstöttner et al. (Citation2020a), the following result on the linearisation of -flat two-input systems has been shown (corresponding to Corollary 4 therein).
Lemma A.1
If the two-input system (Equation1(1)
(1) ) possesses an
-flat output with a certain difference d, then it can be rendered static feedback linearisable by d-fold prolonging a suitably chosen (new) input after a suitable input transformation
has been applied.
To prove Theorem 3.3, i.e. to show that two-input systems with can be rendered static feedback linearisable by d-fold prolonging a suitably chosen (new) input, we only have to show that
implies
-flatness. To be precise, we have to show that minimal flat outputs with
are
-flat outputs. Below we will show this by contradiction, i.e. we will show that a flat output with a difference of
which explicitly depends on derivatives of the inputs is never a minimal flat output. For that we will utilise a certain relation between the state dimension n of the system, the difference d of a flat output and the ‘generalised’ relative degrees of its components, which we derive in the following.
Consider a flat output y and recall that denotes the order of the highest derivative
of
needed to parameterise x and u by this flat. For a component of a flat output which does not explicitly depend on a derivative of the inputs we define the relative degree
by
(A1)
(A1) The following lemma provides a relation between the state dimension n,
and
.
Lemma A.2
For an -flat output
of a two input system of the form (Equation1
(1)
(1) ) the relations
and
hold.
Proof.
See Equation (8) in Gstöttner et al. (Citation2020a), i.e. and
(where
), from which readily the relations
and
follow.
With these two relations, we immediately obtain a relation between the difference of an
-flat output and the relative degrees
of its components.
Corollary A.3
For an -flat output
of a two-input system of the form (Equation1
(1)
(1) ) the relation
holds.
The definition of the relative degree via (EquationA1(A1)
(A1) ) requires that
or
and always yields
. However, it turns out that Corollary A.3 (and in fact also Lemma A.2) analogously apply if one or both components of the flat output explicitly depend on derivatives of the inputs, i.e.
with
explicitly depending on
or
, by setting
. In other words, Corollary A.3 analogously applies if we interpret an explicit dependence of
on the
th derivative of an input as a negative relative degree of
. This can be shown as follows. Let y be a flat output of the system (Equation1
(1)
(1) ) and consider the prolonged system
with the state
,
and the input
, obtained by p-fold prolonging both inputs of the system. The flat parameterisation
,
of the prolonged system with respect to y is easily obtained from the corresponding flat parameterisation of the original system by successive differentiation (we thus have
) and it immediately follows that we have
, i.e. such total prolongations preserve the difference of every flat output.
Let us consider the case that one component of the flat output explicitly depends on derivatives of the inputs. Without loss of generality (swap the components of the flat output if necessary), we can assume that has a relative degree of
(we have
if
explicitly depends on
or
) and
(with
explicitly depending on
or
). By
-fold prolonging both inputs of the system, we obtain the system
with the state
,
and the input
. For this prolonged system, the components of the flat output
only depend on the state and the inputs and thus, Corollary A.3 directly applies. By construction we have
since
explicitly depends on
. The
th derivative of
explicitly depends on u and therefore we have to differentiate it another
times until it explicitly depends on
and thus
. According to Corollary A.3 we thus have
. Above we noticed that
, i.e. total prolongations preserve the difference and thus,
, i.e. exactly the same as Corollary A.3 would yield when we set
.
The case that both components of the flat output explicitly depend on derivatives of the inputs, i.e. (with
explicitly depending on
or
), can be handled analogously and yields
, i.e. exactly the same as Corollary A.3 would yield when we set
and
.
With these preliminary results at hand we can now prove that minimal flat outputs with of a two-input system of the form (Equation1
(1)
(1) ) are actually
-flat outputs. Let
be a minimal flat output of (Equation1
(1)
(1) ) with
. In the following, we show that
by contradiction. Without loss of generality, we can assume that
(swap the components of the flat output if necessary). Assume that
. According to the above discussed generalisation of Corollary A.3, we have
and thus
. Because of
, we have
. We can assume
, since for n = 2, the system would be static feedback linearisable with the state of the system forming a linearising output due to the assumption
, which is in contradiction with the minimality of y, and for n = 1 the rank condition
could not hold. Thus
and in turn the first component of the flat output has a (positive) relative degree of
. This enables us to replace
states of the system by
and its first
derivatives by applying the state transformation
(A2)
(A2) where
are arbitrary functions of the state, chosen such that (EquationA2
(A2)
(A2) ) is a regular state transformation. By additionally applying the input transformation
,
, with g chosen such that this transformation is invertible with respect to u, we obtain
(A3)
(A3) Recall that we have
and thus
. Due to the assumption
, we thus have
. However, for
, (EquationA3
(A3)
(A3) ) reads
so the system would be static feedback linearisable with
forming a linearising output, which is in contradiction with the minimality of the flat output y. For
, the system would consist of a single integrator chain of length n, which actually contradicts with
. We thus have
and because of
, also
. In conclusion, every minimal flat output with a difference of
is an
-flat output. Lemma A.1 therefore guarantees that a system with
can be rendered static feedback linearisable by d-fold prolonging a suitable chosen (new) input after a suitable input transformation
has been applied, which completes the proof.
A.2. Proof of Lemma 5.1
By assumption, we have and
with
and
being involutive. For every vector field
and
the Jacobi identity
holds, from which it follows that
. We furthermore have
. For any vector fields
such that
we thus have
. By assumption we have
, which in turn implies that at least one of the vector fields
,
or
Footnote8 in (Equation5
(5)
(5) ), i.e.
(A4)
(A4) is not contained in
. If they are all linearly independent modulo
, i.e.
, then in order for (EquationA4
(A4)
(A4) ) to hold, each coefficient has to be zero, i.e.
,
and
, which only admits the trivial solution
. So we only have to consider the cases
and
, i.e. those cases in which
yields 2 new directions or 1 new direction with respect to
, respectively.
Case 1: Let us first consider the case , i.e.
, where
and
are a suitable selection of the three vector fields
,
and
. We distinguish between the following subcases:
The subcase
The remaining subcase
Case 2: Consider the case , i.e.
, where
is either
,
or
. We distinguish between the following subcases:
The subcase
The remaining subcase
In conclusion, if , there exists no non-trivial solution. If
, there either exists (up to a multiplicative factor) only one solution or no non-trivial solution. If
, there exist (up to a multiplicative factor) at most two solutions or no non-trivial solutions (complex solutions are not relevant).
A.3. The special case with of the form (17)
By assumption we have and
, i.e. the distribution
is non-involutive and the involutive distributions
are of the form (Equation17
(17)
(17) ). It follows that we necessarily have
. Indeed,
would imply
and in turn either
, which contradicts with
being non-involutive, or
and then, due to
,
would follow, which again contradicts with
being non-involutive. Thus
and therefore
.
Thus we have to show that the system necessarily meets item 2b, i.e. that there exists a non-vanishing vector field such that
where
is defined as
. Let us show that the vector field
meets this criterion. The vector field
meets
and yields
. The involutivity of
implies that
. Therefore,
and
.
Above, we have deduced that , which because of
implies that
and thus
is non-involutive. So we have to show next that item 3a is necessarily met.
We have (see (Equation17
(17)
(17) )), from which the involutive closure of
follows as
and thus 3a.I is met. Note that we necessarily have
. Indeed, since
and
,
would imply n = 2 and thus
, which is in contradiction with
being non-involutive. Therefore, we necessarily have
, based on which we next show that necessarily 3a.II is met, i.e. that necessarily
. Since
, the condition holds if and only if
, which can be shown by contradiction. Assume that
and thus
. Based on the Jacobi identity, it can then be shown that this would imply
. However, since
, this would in turn imply that the system contains an autonomous subsystem, which is in contradiction with the assumption that the system is flat.
With , it follows that the distributions
,
constructed in item 5 and the distributions
are related via
and thus
So these distributions are indeed involutive and there indeed exists an integer s such that
, which completes the necessity part of the proof for the special case
with
.
Appendix 2. Proofs of Lemmas
A.4. Proof of Lemma 7.1
We have with
and thus
and in turn
We have
. The involutivity of
implies that
and
are collinear modulo
. In case of
, we certainly have
. Indeed, assume that
and
. We then have
(where
due to the involutivity of
). Thus either
or
. It follows that the first case would lead to
which for
would imply that
is involutive, contradicting with
being non-involutive. The second case, i.e.
would lead to
and in turn
which for
would imply that
is involutive, again contradicting with
being non-involutive. Thus, in case of
we always have
, and thus
The form (Equation16
(16)
(16) ) then easily follows from the involutivity of the distributions
and the fact that
and
coincide modulo
However, for , it can indeed happen that
and thus
(in which case we necessarily have
). In this case, due to the involutivity of the distributions
and the fact that
and
coincide modulo
the form (Equation17
(17)
(17) ) follows.
A.5. Proof of Lemma 7.2
Under the assumption d = 2 with , the distribution
is involutive, which can be shown by contradiction. Assume that
is non-involutive. From (Equation16
(16)
(16) ), it follows that we haveFootnote9
Since
and
is involutive, we then have
, i.e.
. We have
and since
we have
. However, since
is assumed to be non-involutive we necessarily have
and thus, the direction which completes
to its involutive closure is contained in
, which would lead to
and contradict with
being non-involutive. Thus
is indeed involutive.
From the Jacobi identity
where we have used the involutivity of
for the second term, it follows that the vector field
, which completes
to
, is contained in
, and thus
, as desired.
A.6. Proof of Lemma 7.3
The vector field is a Cauchy characteristic vector field of
. Indeed, we have (see (Equation19
(19)
(19) ) and (Equation20
(20)
(20) ))
(A5)
(A5) From the Jacobi identity
it follows that
, where we have used the fact that
and that
and
are involutive. The involutivity of
together with
implies that
.
The distribution is by assumption non-involutive. Since
and
is involutive it follows that
.
In case of it immediately follows from the Jacobi identity and the way the distributions
are constructed that
. We have
and we have just shown that
. Since by assumption
it follows that
. Since
is contained in the involutive subdistribution
(see (A5)), it follows that the vector field
cannot be contained in
and thus
, which in turn implies that the vector fields
and
are collinear modulo
, i.e.
. From the latter it follows that
, which because of
implies that
. It follows that
, i.e. further Cauchy characteristic vector fields which are linearly independent of those we have already found cannot exist, otherwise
would be involutive.
In case of , the distribution
does not exist. However, we have the involutive distribution
and we have
in this case. Thus it follows that
. Based on the latter by applying the Jacobi identity, it can be shown that
. Repeating the proof above with
replaced by
gives the desired result that in case of
we have
.
A.7. Proof of Lemma 7.4
By assumption we have , which actually implies
. Indeed, since
is non-involutive, we necessarily have
. Because of
and
, we thus have
. Apply a change of coordinates
such that
and
get straightened out simultaneously, i.e. such that in the new coordinates we have
Since
, in these coordinates there exists a basis for
of the form
with the two vector fields
being of the form
,
(where
).
In case of (we have
and thus simply
in this case) choose any function
,
and define the vector field
, which is nonzero due to the non-involutivity of
(indeed,
would yield
which contradicts with
being non-involutive). The distribution
is obviously involutive and we by construction have
. Note that there exist infinitely many valid choices for the function ψ and different choices yield in general different distributions
.Footnote10
Next, let us consider the case . Note that because of
, in the above introduced coordinates the vector field f is of the form
We thus have
where
. Since by assumption
, the vector fields
and
are collinear modulo
. Without loss of generality, we can assume that
, implying that there exists a function α such that
. This function only depends on
and
since the vector fields
and
only depend on
and
, i.e.
. Define the distribution
. It is immediate that this distribution is involutive and since
and
are independent we have
.Footnote11
So in any of the two cases, i.e. or
, we have shown that there exists an involutive distribution
with some vector field
,
. What is left to do is to show that
. By construction, we have
, so we only have to show that
, which can be shown by contradiction. Assume that
. Due to the Jacobi identity, for every vector field
we then have
(where we have used that
and that
implies
, and the involutivity of
). However, this implies
for every
, which in turn would imply that
is involutive and contradict with
being non-involutive.
A.8. Proof of Lemma 7.5
We have and since
we have
. Based on the Jacobi identity it can be shown that
. Since by assumption
, the vector fields
and
are collinear modulo
. Without loss of generality, we can assume that
and thus
. The vector field
by construction meets
,
and
, implying that
. It follows that
(the existence of further Cauchy characteristic vector fields would contradict with
being non-involutive) and thus
.
That can be shown as follows. We have
and by assumption
, and we just have shown that
with
,
. Therefore,
holds if and only if
, which can be shown by contradiction. Assume that
. Due to the Jacobi identity, for every vector field
we then have
(where we have used that
and that
implies
, and the involutivity of
). However, this implies that
for every
, which in turn would imply that
is involutive and contradict with
being non-involutive.