
Abstract
With new market developments and e-commerce, there is an increased use of and interest in automation for order picking. This paper presents a systematic review and content analysis of the literature. It has the purpose of understanding the relevant performance aspects for automated, or partly automated, OPSs and identifying the studied links between design and performance, i.e. identifying which combinations of design aspects and performance aspects have been studied in previous research. For this purpose, 74 papers were selected and reviewed. From the review, it is clear that there has been an increased number of papers dealing with the performance of automated, or partly automated, OPSs in recent years. Moreover, there are differences between the different OPS types, but, overall, the performance categories of throughput, lead time, and operational efficiency have received the most attention in the literature. The paper identifies links between design and performance that have been studied, as well as links that appear to be under-researched. For academics, this paper synthesises the current knowledge on the performance of automation in OPSs and identifies opportunities for future research. For practitioners, the paper provides knowledge that can support the decision-making process of automation in OPSs.
1. Introduction
New market developments, e-commerce, and increased customer expectations have raised the competition for warehouses and manufacturing facilities to handle more orders within tighter delivery times (Andriansyah et al. Citation2014; Marchet, Melacini, and Perotti Citation2015). Automation in order picking (OP) has been suggested to further cost reduction, shorter delivery response times, better picking accuracy, and space utilisation (Caputo and Pelagagge Citation2006; Marchet, Melacini, and Perotti Citation2015), which makes the performance of order picking systems (OPSs) a vital aspect of company competitiveness. Consequently, recent research has been increasingly focusing on new automated technologies with the potential to improve picking performance (Caputo and Pelagagge Citation2006; De Koster, Andrew, and Roy Citation2017).
For a company designing an OPS, whether it is establishing new operations or reviewing existing operations for improvement, it is difficult to make decisions about whether and how to apply automation. Various aspects affect OP performance (Taljanovic and Salihbegovic Citation2009), and different solutions are likely to affect the performance of the OPS differently. Moreover, it is difficult to assess the links between different OP problems (Gu, Goetschalckx, and McGinnis Citation2007).
Research has focused on assessing OPS performance for certain OPS types and selected issues in OPS (De Koster, Le-Duc, and Roodbergen Citation2007; Bauters et al. Citation2011). However, to the best of our knowledge, no review papers have focused specifically on automated, or partly automated, OPS performance and its relation to OPS design decisions. Therefore, this paper, which has been adapted from a conference paper (Jaghbeer, Hanson, and Johansson Citation2017), presents a systematic review and content analysis of the existing literature on automation in OPSs, focusing on links between design and performance that have been studied in previous research. A more precise research purpose is presented in subsection 2.4.
The organisation of the paper is as follows. Section 2 presents the frame of reference used in the literature analysis. Thereafter, Section 3 presents the methodology used to conduct the study. The literature review analysis is presented in Section 4, including descriptive and content analyses. Discussion and opportunities for future research are presented in Section 5, and, finally, the conclusion can be found in Section 6.
2. Frame of reference
This section introduces a classification scheme used to categorise the reviewed papers. The first classifier is presented in subsection 2.1 and divides papers according to the studied OPS type. The second classifier in subsection 2.2 divides papers according to the studied performance aspects. Thereafter, subsection 2.3 presents the OPS design aspects used in presenting the links between design and performance in the reviewed literature. Finally, subsection 2.4 presents the purpose of the paper.
2.1. OPSs classification
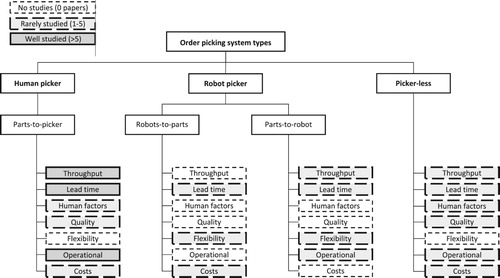
This section presents an OPS classification used for the content analysis in Section 4.2. Based on the different OPS classifications presented by Van den Berg (Citation1999), De Koster, Le-Duc, and Roodbergen (Citation2007), Dallari, Marchet, and Melacini (Citation2009), and Huang, Chen, and Pan (Citation2015), an OPS classification is proposed in Figure . This classification distinguishes OPSs according to whether a human, robot, or no picker is used, with an example of each category. As shown in Figure , this paper focuses on parts-to-picker, robot-to-parts, parts-to-robot, and picker-less OPSs, which are shaded in grey. Papers dealing with picker-to-parts OPSs are excluded, as they are mainly manual systems that are outside this papeŕs scope.
Figure 1. Classification of OPS types. The shaded OPSs are in focus in this paper. The figure also includes an example of each shaded type of OPS.
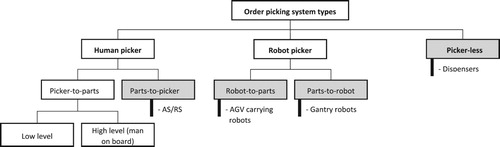
Parts-to-picker systems are partly automated and include an automatic device bringing items from a storage area to a picking station, where human pickers complete the OP and possible packing (Huang, Chen, and Pan Citation2015; Lenoble, Frein, and Hammami Citation2016). OPSs with a robotic picker include robot-to-parts and parts-to-robot systems, where a robot is performing the actual picking. Robot-to-parts systems include mobile robots moving to storage areas and picking the items, and parts-to-robot systems include robots carrying out the picking and packing at a picking station (Huang, Chen, and Pan Citation2015). Picker-less OPSs are fully automated with no human or robot performing the actual picking.
2.2. Performance categories
In this review, previously published review papers are utilised to develop the performance categories for the literature classification. Rouwenhorst et al. (Citation2000) focus on warehouse design and control, including OP. They present an established warehouse performance criterion to be maximum throughput at minimum costs and discuss the importance of environmental and ergonomic aspects (Rouwenhorst et al. Citation2000). Staudt et al. (Citation2015) present a structured analysis of the literature on the warehouse activities performance evaluation, including OP. For OP, the study highlights time, quality, cost, and productivity as the main performance evaluation criteria (Staudt et al. Citation2015). They find the most-used time aspects to be lead time and picking time. Furthermore, they define quality as including order fill rate and picking accuracy; cost as inventory and order processing cost; and productivity as throughput, resource utilisation, and picking productivity (Staudt et al. Citation2015). In a later study, Van Gils et al. (Citation2018) use the performance aspects developed by Staudt et al. (Citation2015) to review and classify manual OPS literature. De Koster, Le-Duc, and Roodbergen (Citation2007) highlight flexibility as an important aspect in OPSs to accommodate changes and uncertainties. Gu, Goetschalckx, and McGinnis (Citation2010) find that warehouse design affects performance in terms of throughput, quality, costs, space, and machine utilisation. Grosse, Glock, and Neumann (Citation2017) highlight human factors in OP as a major determinant of OPS performance.
Seven performance categories are derived from previous review papers to classify the literature. It should be emphasised here that OPS performances are overlapping to a certain extent, and it is difficult to draw a sharp line between different categories. Therefore, the derived categories should not be regarded as unique or mutually exclusive. The derived performance categories are throughput, lead time, human factors, quality, flexibility, operational efficiency, and costs.
2.3. Design categories
Previous literature on the design of OPSs is used to formulate the design categories used in this paper. Matson and White (Citation1982) present a literature review of automated OPSs and discuss equipment selection as essential in OPS design. Rouwenhorst et al. (Citation2000) develop a framework for warehouse design and control. For OP, they consider the picking equipment, area layout, and picking policies. De Koster, Le-Duc, and Roodbergen (Citation2007) focus on planning for efficient OPSs. Planning aspects frequently used in the literature are layout design, storage assignment, zoning, batching, and routing. Dallari, Marchet, and Melacini (Citation2009) propose a procedure for designing OPSs, including equipment type and operational policies. Gu, Goetschalckx, and McGinnis (Citation2010) study the design of warehouses including OP, where they consider layout, equipment selection, and operational strategies. Grosse, Glock, and Neumann (Citation2017) consider OPS design to include layout, storage assignment, zoning, batching, routing, and equipment. Van Gils et al. (Citation2018) present a literature review on the design of OPSs, taking into consideration material handling equipment and layout of the storage area, in addition to OP policies. OP policies include storage assignment and retrieval, routing, and batching policies (Chackelson et al. Citation2013; Van Gils et al. Citation2018). From the reviewed literature on OPS design, it appears that attention is directed towards three design categories: equipment, policy, and layout.
2.4. Research purpose
This paper has the purpose of understanding the relevant performance aspects for automated, or partly automated, OPSs and identifying the studied links between design and performance, i.e. identifying which combinations of design aspects and performance aspects have been studied in previous research. The paper presents a systematic literature review and content analysis that utilise a structure from the OPS classification, performance categories, and design categories that have been identified above in sub-sections 2.1–2.3.
3. Methodology
This section presents the research approach and methodology. The systematic literature review process proposed by Denyer and Tranfield (Citation2009) was followed in this paper to ensure a scientific and transparent approach, in addition to an increase in reliability and validity. Systematic literature reviews increase the probability of an unbiased and comprehensive account of literature compared to a traditional literature review and are characterised by objectivity, systematicness, transparency, and replicability. The following steps developed by Denyer and Tranfield were utilised in this study: (1) location of studies, (2) study selection, (3) analysis, and (4) results reporting.
A research protocol was developed prior to the systematic literature review, including a detailed description of how the review should be conducted (Denyer and Tranfield Citation2009). The protocol included coding all reviewed papers according to their purpose, author, year, and frame of reference to minimise bias in the review process.
3.1. Locating studies
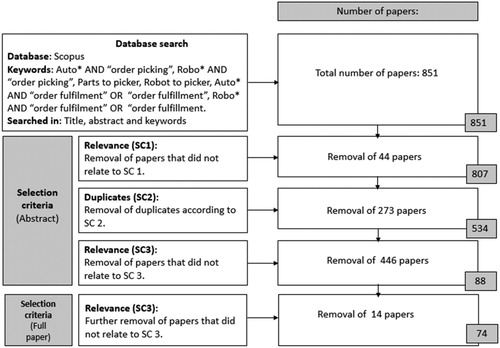
The first step includes identifying research papers relevant to the study's scope (Denyer and Tranfield Citation2009). Scopus database was chosen for the search to ensure wide coverage and good quality of publications, as it is the largest abstract and citation database of peer-reviewed articles and conference papers. Moreover, it covers the majority of scientific journal articles and conference papers in the area of automation in OP. The following keywords were used in the search engine, reflecting this paper's focus on automation in OPSs:
Auto and ‘order picking’ OR Robo and ‘order picking’
Robo AND ‘order picking’
Parts-to-picker
Robot-to-picker
Auto AND ‘order fulfilment’ OR ‘order fulfillment’
Robo AND ‘order fulfilment’ OR ‘order fulfillment’
The keywords were selected to appear in the abstract, title, or article keywords, which would direct the search results towards research with a focus on automation in OP, rather than studies that briefly mention it.
3.2. Study selection
In the second step, selection criteria (SC) were formulated for the inclusion and exclusion of papers. These criteria reflect aspects of the formulated RQs with a primary focus on the papers’ content (Denyer and Tranfield Citation2009). The following three selection criteria were applied when reviewing the paper title, abstract, and, if needed, the full paper:
SC1: Conference and journal articles in the English language were included for any year of publication in the database until 2019.
SC2: Duplicate papers were excluded.
SC3: Only relevant publications were included. When checking titles and abstracts, research publications should have dealt with a certain type of automated, or partly automated, OPS in accordance with Figure . To correspond to the present paper's purpose of studying the performance of order picking, publications should have studied one or more performance aspects of an OPS. This criterion led to excluding the following research papers: (a) papers not dealing with a certain automation type of OPSs and (b) papers with no performance aspect identified. This includes papers focusing only on the design of a particular material handling part or reporting a new technology in equipment (e.g. designing carousels, racks, cranes, and shelves in automated storage and retrieval systems (AS/RSs), or sensor types in robots). Some papers were removed after full review according to SC3.
Figure 2. Data collection and selection summary.
3.3. Analysis and synthesis
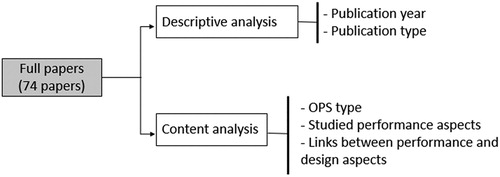
The third step was to break down individual publications into their constituent parts and describe how they relate to one another (Denyer and Tranfield Citation2009). Literature findings were grouped according to Tranfield, Denyer, and Smart (Citation2003) by presenting review findings in two steps summarised in Figure :
Descriptive analysis of findings: Papers were first categorised according to their year and type of publication.
Thematic content analysis based on literature synthesis: The papers were analysed in terms of the studied performance aspects identified in Section 2.2 and their links to design aspects identified in Section 2.3. Analyses were presented for each OPS type according to the classification in Figure .
Figure 3. Literature analysis process.
4. Literature analysis
The results of the analyses are presented in this section. First, a descriptive analysis of the number of published papers per year and publication type is presented in Section 4.1. Second, a presentation of the literature with a focus on the performance categories and studied links to design is outlined in Section 4.2.
4.1. Descriptive analysis
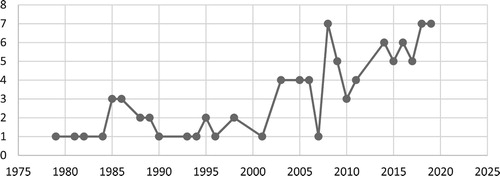
The 74 papers identified in the systematic literature review were analysed according to the number of papers per year and publication type. As Figure illustrates, all papers were published between 1979 and 2019. A relatively low number of research papers were found between 1990 and 2000, with a value of one or two papers per year. An increased number of papers on automation in OP were published afterwards, with six papers in 2016, five papers in 2017, and seven papers in both 2018 and 2019. Based on the evidence of this analysis, the research interest and use of automation in OPSs are continuously increasing.
Figure 4. Time distribution of reviewed papers.
The analysis of papers by publication type is presented in Table . This analysis shows that the majority of the reviewed papers, accounting for 47 papers, are journal articles, and the remaining 27 are conference papers. The papers are published in 22 different journals. The three journals with the highest number of publications are: International Journal of Production Research, IIE Transactions, and European Journal of Operational Research.
Table 1. Number of papers by publication type.
4.2. Content analysis focusing on performance aspects
This section presents the reviewed academic literature. The analysis is presented according to the frame of reference in Section 2. Each subsection presents papers addressing a specific type of OPS in accordance with Figure . Furthermore, for each OPS type, the literature is themed according to the performance categories in subsection 2.2 and links to design aspects in subsection 2.3. Note that the performance categories are not mutually exclusive, as studies can include several performance categories.
4.2.1. Parts-to-picker
This section presents the performance aspects studied in the parts-to-picker OPS literature and the links between parts-to-picker OPS design and performance. The studied performance aspects are summarised in Table for the various parts-to-picker OPSs. Tables – present the studied links between the design and performance of the parts-to-picker OPS literature.
Table 2. Performance aspects studied.
Table 3. Links between performance and design identified in the literature on parts-to-picker OPSs with automated storage and retrieval systems (AS/RSs).
Table 4. Links between performance and design identified in the literature on parts-to-picker OPSs with vertical lift modules (VLMs).
Table 5. Links between performance and design identified in the literature on parts-to-picker OPSs with conveyors.
Table 6. Links between performance and design identified in the literature on parts-to-picker OPSs with carousels.
Table 7. Links between performance and design identified in the literature on parts-to-picker OPSs with robotic parts-to-picker systems.
4.2.1.1. Automated storage and retrieval systems (AS/RSs)
Throughput is studied by many researchers. Medeiros, Enscore, and Smith (Citation1986) develop a model to predict the performance of a mini-load through analysing throughput by changing storage policies, crane speed, and aisle layout. Mahajan, Rao, and Peters (Citation1998) study the retrieval sequencing in an AS/RS and its effect on throughput. Park, Foley, and Frazelle (Citation2006) analyse high and low storage turnover zone effects on AS/RS throughput. Manzini, Gamberi, and Regattieri (Citation2006) study how throughput is affected by storage assignment and fulfilment policies, order consolidation, and routing and sequencing policies. Andriansyah et al. (Citation2011) propose a simulation model for a mini-load OPS and study how retrieval strategy and number of mini-load machines affect throughput. Güller and Hegmanns (Citation2014) study the effect of the number of order lines per order on the throughput of AS/RSs. Ramtin and Pazour (Citation2015) investigate how throughput is affected by optimal stock keeping unit (SKU) assignments for pick positions in AS/RSs.
Lead time-related aspects have been studied by several researchers. Khojasteh and Son (Citation2008) modelled an AS/RS in different warehouse settings and saw the effect on order retrieval time. The considered design parameters were number of aisles, warehouse density and configuration of rack (Khojasteh and Son Citation2008). Andriansyah, Etman, and Rooda (Citation2010) present a model to predict order flow time performance for an AS/RS that reflects warehouse reliability in meeting customer due dates. The model analyses the system performance in different settings of product interarrival rates, order release strategies, and order length distribution, which is the number of SKUs to be picked in an order (Andriansyah, Etman, and Rooda Citation2010).
Operational efficiency for AS/RSs is investigated by examining various aspects. Kusiak, Hawaleshka, and Cormier (Citation1985) study the effect of picking density on weighted tardiness. They find that tardiness is reduced for a high number of locations and low machine tour numbers. Medeiros, Enscore, and Smith (Citation1986) study the effect of storage policies, crane speed, and aisle layout on operator and machine utilisation. Hwang, Baek, and Lee (Citation1988) present heuristic algorithms for order batching, which leads to decreasing AS/RS machine travel times. Chiang et al. (Citation1994) study the effect of several design aspects: rack shape, number of picking locations, and picking area layout, on machine travel time in AS/RSs. In addition, Bozer and White (Citation1996) estimate picker and machine utilisation in an AS/RS and how it is affected by retrieval and storage policies. Wu and Mulgund (Citation1998) develop a model to minimise picker and machine idle time by balancing the work between them. Su (Citation1995) reduces AS/RS machine travel time by optimising OP sequencing and routing. In a later study, Su et al. (Citation2009) study the effect of machine routing on the distance travelled by the machine. Ramtin and Pazour (Citation2014) compare different storage policies in an AS/RS and investigate their effect on machine travel time. Khojasteh and Jae-Dong (Citation2016) develop a heuristic to minimise machine travel time in an AS/RS. A summary of the studied performance aspects of parts-to-picker AS/RSs is presented in Table . The links identified between performance aspects and relevant design aspects in parts-to-picker OPSs with AS/RSs are presented in Table .
4.2.1.2. Vertical lift modules (VLMs)
Throughput of VLMs has been studied by Bauters et al. (Citation2011), who presented general guidelines to select between three parts-to-picker OPSs: VLMs, AS/RSs, and carousels. The comparison includes throughput, needed floor space, and number of operators, with the paper further highlighting some contextual constraints associated with item characteristics (Bauters et al. Citation2011). In addition, Battini et al. (Citation2015) compare three storage assignment strategies in a VLM and develop a model to study their effects on throughput. Lenoble, Frein, and Hammami (Citation2016) found that batching increases throughput in VLMs, and Sgarbossa, Calzavara, and Persona (Citation2019) found that class-based storage policies also increase throughput in VLMs.
Lead time has been studied by Lenoble, Frein, and Hammami (Citation2018) for different order batching strategies and their effects on OP time. Human factors and operational efficiency have been studied by Dukic et al. (Citation2018), who presented a comparison between VLMs and traditional manual picking systems in terms of ergonomics, space utilisation, and time. They find VLMs to be more ergonomic than manual OPSs (Dukic et al. Citation2018). A summary of the studied performance aspects of VLMs is found in Table . The links identified between performance aspects and relevant design aspects in parts-to-picker OPSs with VLMs are presented in Table .
4.2.1.3. Conveyors
Throughput has been studied by Andriansyah et al. (Citation2014), who investigated the effects of picking policies on throughput in a conveyor-based OPS and found that dynamic picking results in higher throughput rates. Furthermore, Liu et al. (Citation2015) developed an algorithm in a conveyor-based OPS and found that throughput and conveyor waiting times are affected by the OP strategy.
Lead time in OP is studied in three papers. Armstrong, Cook, and Saipe (Citation1979) study how batching affects order processing time in a conveyor system. Andriansyah, Etman, and Rooda (Citation2009) propose a simulation model for a conveyor-based OPS to predict the mean and variability of order flow times and the effect of order size distribution on flow time prediction. Wu et al. (Citation2017) develop a heuristic to minimise order fulfilment time by reducing idle time and open space in conveyor- and dispenser-based OPSs.
Operational efficiency has been addressed by Wu and Wu (Citation2014), who developed a heuristic algorithm to improve picking efficiency in conveyor- and dispenser-based OPSs by reducing idle time. They find that idle time affects order fulfilment time (Wu and Wu Citation2014). A summary of the studied performance aspects of conveyor-based OPSs is found in Table . The links identified between performance aspects and relevant design aspects in parts-to-picker OPSs with conveyors are presented in Table .
4.2.1.4. Carousels
Throughput of carousels is studied by Park, Park, and Foley (Citation2003); the researchers examine throughput under two different pick-time distributions, depending on whether the picker is a person or a robot. In addition, Park and Rhee (Citation2005) measure the throughput of a carousel and how it is affected by a floating or fixed dwell-point strategy.
Lead time, specifically retrieval time, is studied by Chang, Wen, and Lin (Citation1993), who study the effect of different picking strategies on retrieval time. Job sojourn time is investigated by Park and Rhee (Citation2005) in relation to two dwell-point strategies. Lenoble, Frein, and Hammami (Citation2017) provide a model of batching strategies in the case of single and multiple carousels, with the objective of minimising OP time. Furthermore, Yanyan, Shandong, and Changpeng (Citation2014) present a method to select suitable OPSs between a conveyor or a carousel based on the density and quantity of customer orders, from the standpoint of OP time.
Operational efficiency is investigated by Litvak and Adan (Citation2001), who develop a heuristic to minimise carousel travel time under different retrieval strategies. Park, Park, and Foley (Citation2003) studied picker utilisation in carousels.
Costs are studied by Lee and Kuo (Citation2008), who investigate the effect of different picking strategies and item density on picking cost in a carousel conveyor system. Table summarises the performance aspects of carousel-based OPSs studied in the reviewed literature. The links identified between performance aspects and relevant design aspects in parts-to-picker OPSs with carousels are presented in Table .
4.2.1.5. Robotic parts-to-picker OPSs
Recently, attention has been brought to robotic parts-to-picker OPSs. Throughput is studied by Bauters et al. (Citation2016), who analyse the performance of robotic mobile fulfilment systems (RMFSs) capable of lifting and moving inventory pods and compare them with AS/RSs performance. They find that the throughput of RMFSs is higher than that of AS/RSs and is affected by the number of automated guided vehicles (AGVs) and SKUs per rack (Bauters et al. Citation2016). Lamballais, Roy, and De Koster (Citation2017) build models to estimate throughput in an RMFS. They find that the maximum throughput is affected by the location of workstations (Lamballais, Roy, and De Koster Citation2017). Furthermore, Lamballais Tessensohn, Roy, and De Koster (Citation2020) also find that throughput increases when spreading inventory across multiple pods in RMFSs, when there is an optimal ratio between the number of pick and replenishment stations and when the pod is replenished before it is empty. Roy et al. (Citation2019) analyse the effect of robot assignment strategies on throughput in RMFSs.
Lead time has been studied in several papers. Ekren and Heragu (Citation2010) model the performance of an autonomous vehicle storage and retrieval system (AVS/RS). They investigate the effect of warehouse height and footprint on average cycle time. Lamballais, Roy, and De Koster (Citation2017) build models to estimate average order cycle time in RMFS. Yuan and Gong (Citation2017) evaluate the throughput time of an RMFS by comparing two robot-sharing policies and studying their effect on throughput time. Xue, Dong, and Qi (Citation2018) provide a comparative analysis of three picking strategies in an RMFS and their effect on picking time and distance travelled by robots. Zou, Xu, and De Koster (Citation2018) evaluate the effect of battery management strategy on throughput time in an RMFS, where they compare robots’ battery swapping and charging strategies. Roy et al. (Citation2019) find that the robot assignment strategies affect throughput in an RMFS.
Human factors are evaluated by Lee, Chang, and Choe (Citation2017) with a focus on ergonomics in RMFSs and AS/RSs; they find that AS/RSs have lower risk factors for human workers than RMFSs. In addition, Hanson, Medbo, and Johansson (Citation2018) study the performance characteristics of RMFSs and the links between their performance and design, taking ergonomics and operator training into consideration.
Quality and flexibility are studied by Hanson, Medbo, and Johansson (Citation2018); they elaborate on RMFS picking accuracy and find that robot design with regard to sensors and battery management strategy, in specific induction charging, affects RMFS flexibility.
Operational efficiency is addressed by Ekren and Heragu (Citation2010), who study the effect of warehouse height and footprint on the waiting times for vehicles and the average utilisation of vehicles and lifts in an AVS/RS. Lamballais, Roy, and De Koster (Citation2017) estimate robot utilisation in RMFS. Hanson, Medbo, and Johansson (Citation2018) find a correlation between the uptime of robot sensors and battery management strategy as well as between robot sensors and operational efficiency. Kumar and Kumar (Citation2018) developed a robot routing algorithm that results in a collision-free path for RMFSs. Zhao et al. (Citation2019) found that order sequencing affects efficiency in AVS/RSs. Wang, Chen, and Wang (Citation2019) find that the routing strategy in RMFSs affects picker and robot utilisation. Wang, Yang, and Li (Citation2019) find that different RMFS layouts affect robot travel time. Table summarises the performance aspects of robotic parts-to-picker OPSs studied in reviewed literature. The links identified between performance aspects and relevant design aspects in parts-to-picker OPSs with robotic parts-to-picker systems are presented in Table .
4.2.2. Robot-to-parts
Kimura et al. (Citation2015) study the flexibility of an OPS consisting of a mobile dual arm robot performing the actual picking, mounted on an AGV for transportation. The system can be easily adjusted to changes in product quantity by changing the system design, specifically the number of AGVs used, the use of a dual or single arm robot, and a change in the number of grippers (Kimura et al. Citation2015).
Costs are studied by Bonini, Urru, and Echelmeyer (Citation2016), specifically investment costs and the payback period for a robot mounted on an AGV.
Lead time, in specific picking time, has been studied by Zhu et al. (Citation2016); they examine different picking strategies for a robot performing the actual picking of items for e-commerce and the effects of picking strategy on reachability, collision, picking success rate, and picking time. Boudella, Sahin, and Dallery (Citation2018) develop a mathematical model for the assignment of SKUs in a robot-to-parts OPS.
Table summarises the performance aspects of robot-to-parts OPSs studied in the reviewed literature. Furthermore, the links between performance aspects and relevant design aspects in robot-to-parts OPSs are presented in Table .
Table 8. Links between performance and design identified in robot-to-parts OPS literature.
4.2.3. Parts-to-robot
Derby (Citation2008) studies a multi-arm robot designed for pick-and-place operations where throughput is found to be dependent on robot speed and acceleration.
Lead time is studied by Kim et al. (Citation2003a), who develop a replenishment process logic for gantry picking to shorten cycle time. Khachatryan and McGinnis (Citation2005) study a gantry pick-and-place robot in a puffer picking station and find that the greater the number of buffers, the shorter the picking time.
The flexibility of robots in terms of adaption to picking new items is studied by Dieter Schraft and Ledermann (Citation2003), who study a robot for picking chaotically stored objects in a bin. To adapt the robot for new items, they consider the items’ sizes and geometry, bin geometry, positioning of items, and the area's layout (Dieter Schraft and Ledermann Citation2003).
Operational efficiency is investigated by Kim et al. (Citation2003b), who develop a heuristic to minimise travelling time of a gantry robot. In addition, Li and Bozer (Citation2010) develop a simulation model to analyse four retrieval strategies in a carousel-based OPS, with robots performing the picking activity; they study the effect of retrieval strategies on robot utilisation (Li and Bozer Citation2010).
Table presents a summary of the studied performance aspects of parts-to-robot OPSs. The links between performance aspects and relevant design aspects in parts-to-robot OPSs are presented in Table .
Table 9. Links between performance and design identified in parts-to-robot OPS literature.
4.2.4. Picker-less
The performance of dispensers and A-frames is studied by many researchers. Liu et al. (Citation2011) conclude that for a multi-dispenser OPS, the slotting strategy influences throughput. Lead time aspects are studied by Yigong (Citation2008), who finds that OP sequence in dispensers affects picking time. Jin, Yun, and Gao (Citation2015) find that a dispenser picking time is affected by storage container assignment. Human factors are studied by Franklin et al. (Citation2008), who investigated the effect of two dispenser types on safety and staff satisfaction. Quality is studied by Franklin et al. (Citation2008), where they study the effect of two dispenser types on picking error.
Operational efficiency is studied by Franklin et al. (Citation2008), who evaluate the impact of dispensers on efficiency. In addition, Jin, Yun, and Gao (Citation2015) develop a simulation model of a dispenser route and find that dispensing efficiency is affected by the order of storage containers. Boywitz, Schwerdfeger, and Boysen (Citation2019) find that the order sequencing affects pickers’ utilisation of A-frames.
Cost-related aspects are covered by many researchers. Caputo and Pelagagge (Citation2006) develop a decision support system for operating a dispenser OPS. In this study, the operational costs of OP are linked to the number of pickers and demand contextual aspects (Caputo and Pelagagge Citation2006). Liu et al. (Citation2008) present an optimal slotting solution for an A-frame, focusing on minimising total restock costs. In a later study, Liu et al. (Citation2011) find that the slotting strategy influences operational costs. Meller and Pazour (Citation2008) develop a heuristic for an A-frame dispenser addressing SKU assignment and allocation with consideration of replenishment and picking costs. Pazour and Meller (Citation2011) determine the amount of A-frame infrastructure investment, considering the assignment and allocation of SKUs to meet the throughput requirement.
Table presents a summary of the studied performance aspects of picker-less OPSs. Furthermore, the links between performance aspects and relevant design aspects in picker-less OPSs are summarised in Table .
Table 10. Links between performance and design identified in picker-less OPS literature.
5. Discussion and opportunities for future research
The descriptive analysis indicates an increased research interest in the area of automation in OPSs in recent years, which may be due to its importance, technological advancements and the increased use of automation in practice.
Figure presents a summary of the studied performance categories in the reviewed papers for each OPS type, indicating the number of studies for each performance category. Accordingly, throughput, lead time, and operational efficiency were the most-studied performances in parts-to-picker OPSs. Few papers focus on human factors, quality, and costs. In robot-to-parts OPSs, few papers study lead time, flexibility, and costs. In parts-to-robot OPSs, throughput, lead time, flexibility and operational efficiency are investigated only in few papers. In picker-less OPSs, studies cover most performance categories except flexibility. More research could be directed towards the flexibility of parts-to-picker systems to adequately compare them with other OPSs, including OPSs with robot pickers. Despite their importance, human factors are poorly studied in automated, or partly automated, OPSs; therefore, more research is deemed necessary to cover these factors. Quality and operational efficiency of OPSs with a robot picker could also benefit from more research, considering the technological developments in the area and their increased use in the industry.
Figure 5. Summary of studied performance aspects per OPS type.
Maximising throughput is the goal of most warehouses and companies operating a parts-to-picker OPS with an AS/RS. The reviewed literature highlights that the storage, retrieval and routing policies affect throughput (e.g. Medeiros, Enscore, and Smith Citation1986; Manzini, Gamberi, and Regattieri Citation2006). This is mainly because different policies impact the distance travelled by the storage and retrieval machine differently, in addition to the different effects the policies have on machine and operator utilisation. All of these contribute to the throughput of the OPS. In OPSs with VLMs, order batching is found to positively impact throughput in studies by Lenoble, Frein, and Hammami (Citation2016; Citation2018). The researchers found batching to result in time savings by reducing the number of times a tray is called for picking, which allows orders to be picked simultaneously (Lenoble, Frein, and Hammami Citation2016; Lenoble, Frein, and Hammami Citation2018). In robotic parts-to-picker OPSs, batching is also found to affect the number of robots used (Boysen, Briskorn, and Emde Citation2017), as batching requires fewer robots to supply the picking station in a timely manner. Moreover, the battery management policy in robotic parts-to-picker OPSs is found to affect throughput time (Zou, Xu, and De Koster Citation2018), as the charging time of robots differs depending on whether it is a high- or low-demand period. In low demand, the robots are working one shift and charging at night, while more charging time is needed when the robots are working for more than one shift, which affects the number of available robots and throughput time.
Decision support for selection and design of automated, or partly automated, OPSs is still lacking in the literature. In this regard, further research would be recommended to, first, adequately address the support for decision-making regarding automation in OP systems and, second, perform comparative analysis of the different OPSs with regard to their installation, performance categories, and strengths and limitations. Furthermore, layout design aspects appear to be less studied than picking policies, which could be the result of a lack of appropriate tools and metrics. Thus, these could be interesting areas for further research. In addition, contextual aspects, which are factors outside the control of the system designer, were not considered in this study, although they could affect the OPS performance, as indicated by several authors (e.g. Caputo and Pelagagge Citation2006; Yanyan, Shandong, and Changpeng Citation2014). Therefore, this area would be important to investigate in future research. Finally, the scarcity of empirical research has been recognised, which is also emphasised by Marchet, Melacini, and Perotti (Citation2015). The majority of papers use analytical and simulation models, with a limited number of papers having empirical data. Therefore, there is rationale for conducting further empirical research and performing case studies on automated OPSs to understand their performances.
6. Conclusion
This paper has presented a systematic literature review of papers in the field of automation in OPSs. In total, 74 papers were selected, reviewed, categorised, and analysed to understand the performance aspects for each automated, or partly automated, OPS and the studied links between their design and performance. The study identified the decision-making process of automation in OPS to be a complex area that would benefit from more academic research, particularly in the links between the different performance and design aspects.
The study has both academic and practical implications. For academics, this paper synthesises the current knowledge and accomplished work in automation in OPSs and identifies opportunities for future research. For practitioners, the paper offers a better understanding and overview of the performance and design aspects of various OPSs and the links existing between them. These links need to be considered to enhance and support the decision-making process of automation in OPSs.
Disclosure statement
No potential conflict of interest was reported by the author(s).
References
- Andriansyah, R., W. W. H. De Koning, R. M. E. Jordan, L. F. P. Etman, and J. E. Rooda. 2011. “A Process Algebra Based Simulation Model of a Miniload-Workstation Order Picking System.” Computers in Industry 62 (3): 292–300.
- Andriansyah, R., L. F. P. Etman, I. J. Adan, and J. E. Rooda. 2014. “Design and Analysis of an Automated Order-Picking Workstation.” Journal of Simulation 8 (2): 151–163.
- Andriansyah, R., P. Etman, and J. Rooda. 2009. “Simulation Model of a Single-Server Order Picking Workstation Using Aggregate Process Times.” First International Conference on Advances in System Simulation, IEEE: 23–31.
- Andriansyah, R., L. F. P. Etman, and J. Rooda. 2010. “Aggregate Modeling for Flow Time Prediction of an End-of-Aisle Order Picking Workstation with Overtaking.” In Proceedings of the 2010 Winter Simulation Conference, IEEE: 2070–2081.
- Armstrong, R. D., W. D. Cook, and A. L. Saipe. 1979. “Optimal Batching in a Semi-Automated Order Picking System.” Journal of the Operational Research Society 30 (8): 711–720.
- Battini, D., M. Calzavara, A. Persona, M. Roncari, and F. Sgarbossa. 2015. “Dual-Tray Vertical Lift Module for Order Picking: a Performance and Storage Assignment Preliminary Study.” Proceedings of the XX Summer School Francesco Turco, Napoli, Italy.
- Bauters, K., K. De Cock, J. Hollevoet, G. Dobbelaere, and H. Van Landeghem. 2016. “A Simulation Model to Compare Autonomous Vehicle Based Warehouses with Traditional AS/RS Systems.” European Simulation Conference, Eurosis.
- Bauters, K., T. Govaert, V. Limère, and H. Van Landeghem. 2011. “From Bulk Feeding to Full Kitting: a Practical Case in the Automotive Industry.” Proceedings of the 9th Annual International Industrial Simulation Conference, Eurosis: 244–249.
- Bonini, M., A. Urru, and W. Echelmeyer. 2016. “Fast Deployable Autonomous Systems for Order Picking: How Small and Medium Size Enterprises Can Benefit From the Automation of the Picking Process.” Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics. 479–484.
- Boudella, M. E. A., E. Sahin, and Y. Dallery. 2018. “Kitting Optimisation in Just-in-Time Mixed-Model Assembly Lines: Assigning Parts to Pickers in a Hybrid Robot–Operator Kitting System.” International Journal of Production Research 56 (16): 1–20.
- Boysen, N., D. Briskorn, and S. Emde. 2017. “Parts-to-Picker Based Order Processing in a Rack-Moving Mobile Robots Environment.” European Journal of Operational Research 262 (2): 550–562.
- Boywitz, D., S. Schwerdfeger, and N. Boysen. 2019. “Sequencing of Picking Orders to Facilitate the Replenishment of A-Frame Systems.” IISE Transactions 51 (4): 368–381.
- Bozer, Y. A., and J. A. White. 1996. “A Generalized Design and Performance Analysis Model for End-of-Aisle Order-Picking Systems.” IIE Transactions 28 (4): 271–280.
- Caputo, A. C., and P. M. Pelagagge. 2006. “Management Criteria of Automated Order Picking Systems in High-Rotation High-Volume Distribution Centers.” Industrial Management & Data Systems 106 (9): 1359–1383.
- Chackelson, C., A. Errasti, D. Ciprés, and F. Lahoz. 2013. “Evaluating Order Picking Performance Trade-Offs by Configuring Main Operating Strategies in a Retail Distributor: A Design of Experiments Approach.” International Journal of Production Research 51 (20): 6097–6109.
- Chang, D. T., U. P. Wen, and J. T. Lin. 1993. “Picking Strategies to the Two-Carousel-Single-Server System in an Automated Warehouse.” Journal of the Chinese Institute of Engineers 16 (6): 817–824.
- Chiang, F. C., U. P. Wen, J. T. Lin, and D. T. Chang. 1994. “Travel Time Estimation for the Order Picking Problem in Automated Warehousing Systems.” Journal of the Chinese Institute of Engineers 17 (2): 205–211.
- Dallari, F., G. Marchet, and M. Melacini. 2009. “Design of Order Picking System.” The International Journal of Advanced Manufacturing Technology 42 (1): 1–12.
- De Koster, R., L. A. L. Andrew, and D. Roy. 2017. “Warehouse Design and Management.” International Journal of Production Research 55 (21): 6327–6330.
- De Koster, R., T. Le-Duc, and K. J. Roodbergen. 2007. “Design and Control of Warehouse Order Picking: A Literature Review.” European Journal of Operational Research 182 (2): 481–501.
- Denyer, D., and D. Tranfield. 2009. “Producing a Systematic Review.” In The SAGE Handbook of Organizational Research Methods, edited by D. A. Buchanan, and A. Bryman, 671–689. Thousand Oaks, CA: Sage Publications.
- Derby, S. 2008. “Treadbot Multi-Head Robot for High Throughput Applications.” Industrial Robot: An International Journal 35 (2): 108–115.
- Dieter Schraft, R., and T. Ledermann. 2003. “Intelligent Picking of Chaotically Stored Objects.” Assembly Automation 23 (1): 38–42.
- Dukic, G., R. Lukas, B. Gajsek, T. Opetuk, and H. Cajner. 2018. “Time and Ergonomic Assessment of Order Picking Using Vertical Lift Modules.” 14th International Conference on Industrial Logistics, Beer-Sheva, Israel.
- Ekren, B. Y., and S. S. Heragu. 2010. “Simulation-Based Regression Analysis for the Rack Configuration of an Autonomous Vehicle Storage and Retrieval System.” International Journal of Production Research 48 (21): 6257–6274.
- Franklin, B. D., K. O’Grady, L. Voncina, J. Popoola, and A. Jacklin. 2008. “An Evaluation of Two Automated Dispensing Machines in UK Hospital Pharmacy.” International Journal of Pharmacy Practice 16 (1): 47–53.
- Grosse, E. H., C. H. Glock, and W. P. Neumann. 2017. “Human Factors in Order Picking: A Content Analysis of the Literature.” International Journal of Production Research 55 (5): 1260–1276.
- Gu, J., M. Goetschalckx, and L. F. McGinnis. 2007. “Research on Warehouse Operation: A Comprehensive Review.” European Journal of Operational Research 177 (1): 1–21.
- Gu, J., M. Goetschalckx, and L. F. McGinnis. 2010. “Research on Warehouse Design and Performance Evaluation: A Comprehensive Review.” European Journal of Operational Research 203 (3): 539–549.
- Güller, M., and T. Hegmanns. 2014. “Simulation-Based Performance Analysis of a Miniload Multishuttle Order Picking System.” 47th CIRP Conference on Manufacturing Systems. Procedia CIRP 17: 475–480.
- Hanson, R., L. Medbo, and M. I. Johansson. 2018. “Performance Characteristics of Robotic Mobile Fulfilment Systems in Order Picking Applications.” IFAC-Papers OnLine 51 (11): 1493–1498.
- Huang, G. Q., M. Z. Chen, and J. Pan. 2015. “Robotics in E-commerce Logistics.” HKIE Transactions 22 (2): 68–77.
- Hwang, H., W. J. Baek, and M. K. Lee. 1988. “Clustering Algorithms for Order Picking in an Automated Storage and Retrieval System.” International Journal of Production Research 26 (2): 189–201.
- Jaghbeer, Y., R. Hanson, and M. I. Johansson. 2017. “Automated Order Picking: A Literature Review.” In PLAN Conference. Gothenburg, Sweden.
- Jin, H., C. Yun, and X. Gao. 2015. “Application and Research of the Refilling Process with Clip Type Manipulator.” In Robotics and Biomimetics (ROBIO), IEEE International Conference. IEEE. 775–780.
- Khachatryan, M., and L. F. McGinnis. 2005. “Small Parts Order-Picking Systems Analysis.” In IIE Annual Conference Proceedings 1. Institute of Industrial and Systems Engineers (IISE).
- Khojasteh, Y., and S. Jae-Dong. 2016. “A Travel Time Model for Order Picking Systems in Automated Warehouses.” The International Journal of Advanced Manufacturing Technology 5 (86): 2219–2229.
- Khojasteh, Y., and J. D. Son. 2008. “Order Picking Problem in a Multi-Aisle Automated Warehouse Served by a Single Storage/Retrieval Machine.” International Journal of Information and Management Sciences 19 (4): 651–665.
- Kim, B. I., S. S. Heragu, R. J. Graves, and A. S. Onge. 2003a. “Realization of a Short Cycle Time in Warehouse Replenishment and Order Picking.” International Journal of Production Research 41 (2): 349–336.
- Kim, B. I., S. S. Heragu, R. J. Graves, and A. S. Onge. 2003b. “Clustering-Based Order-Picking Sequence Algorithm for an Automated Warehouse.” International Journal of Production Research 41 (15): 3445–3460.
- Kimura, N., K. Ito, T. Fuji, K. Fujimoto, K. Esaki, F. Beniyama, and T. Moriya. 2015. “Mobile Dual-Arm Robot for Automated Order Picking System in Warehouse Containing Various Kinds of Products.” In System Integration (SII). IEEE/SICE International Symposium, 332–338.
- Kumar, N. V., and C. S. Kumar. 2018. “Development of Collision Free Path Planning Algorithm for Warehouse Mobile Robot.” Procedia Computer Science 133: 456–463.
- Kusiak, A., O. Hawaleshka, and G. Cormier. 1985. “Order Picking Policies in Automated Storage Systems.” In Proceedings of the 6th International Conference on Automation in Warehousing, IFS Publications Stockholm: 239–248.
- Lamballais, T., D. Roy, and M. B. M. De Koster. 2017. “Estimating Performance in a Robotic Mobile Fulfillment System.” European Journal of Operational Research 256 (3): 976–990.
- Lamballais Tessensohn, T., D. Roy, and R. B. De Koster. 2020. “Inventory Allocation in Robotic Mobile Fulfillment Systems.” IISE Transactions 52 (1): 1–17.
- Lee, J. A., Y. S. Chang, and Y. H. Choe. 2017. “Assessment and Comparison of Human-Robot Co-Work Order Picking Systems Focused on Ergonomic Factors.” In International Conference on Applied Human Factors and Ergonomics, 516–523. Springer, Cham.
- Lee, S. D., and Y. C. Kuo. 2008. “Exact and Inexact Solution Procedures for the Order Picking in an Automated Carousel Conveyor.” International Journal of Production Research 46 (16): 4619–4636.
- Lenoble, N., Y. Frein, and R. Hammami. 2016. “Optimization of Order Batching in a Picking System with a Vertical Lift Module.” In Sixth International Conference on Information Systems, Logistics and Supply Chain (ILS International Conference).
- Lenoble, N., Y. Frein, and R. Hammami. 2017. “Optimization of Order Batching in a Picking System with Carousels.” In IFAC 2017, 20th World Congress of the International Federation of Automatic Control.
- Lenoble, N., Y. Frein, and R. Hammami. 2018. “Order Batching in an Automated Warehouse with Several Vertical Lift Modules: Optimization and Experiments with Real Data.” European Journal of Operational Research 267 (3): 958–976.
- Li, L., and Y. A. Bozer. 2010. “Retrieval Strategies for Multi-Tier Automated Carousel Conveyors with Multiple Robots.” Simulation 86 (7): 395–404.
- Li, Z. P., J. L. Zhang, H. J. Zhang, and G. W. Hua. 2017. “Optimal Selection of Movable Shelves Under Cargo to Person Picking.” International Journal of Simulation Modelling (IJSIMM) 16 (1): 45–156.
- Litvak, N., and I. Adan. 2001. “The Travel Time in Carousel Systems under the Nearest Item Heuristic.” Journal of Applied Probability 38 (1): 45–54.
- Liu, D., S. Mou, Y. Wu, and G. Shan. 2015. “Research on Hybrid Picking Strategy in an Automated Order Picking System.” International Journal of Control and Automation 8 (8): 103–112.
- Liu, P., Y. Wu, C. Zhou, and N. Xu. 2011. “Fluid-Based Slotting Optimization for Automated Order Picking System with Multiple Dispenser Types.” Chinese Journal of Mechanical Engineering 24 (4): 529–538.
- Liu, P., C. Zhou, Y. Wu, and N. Xu. 2008. “Slotting the Complex Automated Picking System in Tobacco Distribution Center.” In IEEE International Conference on Automation and Logistics. IEEE: 2126–2130.
- Mahajan, S., B. V. Rao, and B. A. Peters. 1998. “A Retrieval Sequencing Heuristic for Miniload End-of-Aisle Automated Storage/Retrieval Systems.” International Journal of Production Research 36 (6): 1715–1731.
- Manzini, R., M. Gamberi, and A. Regattieri. 2006. “Design and Control of an AS/RS.” The International Journal of Advanced Manufacturing Technology 28 (7): 766–774.
- Marchet, G., M. Melacini, and S. Perotti. 2015. “Investigating Order Picking System Adoption: A Case Study-Based Approach.” International Journal of Logistics 18 (1): 82–98.
- Matson, J. O., and J. A. White. 1982. “Operational Research and Material Handling.” European Journal of Operational Research 11 (4): 309–318.
- Medeiros, D. J., E. E. Enscore Jr, and A. Smith. 1986. “Performance Analysis of Miniload Systems.” In Proceedings of the 18th Conference on Winter Simulation, ACM. 606-612.
- Meller, R. D., and J. A. Pazour. 2008. “A Heuristic for SKU Assignment and Allocation in an A-frame system.” In IIE Annual Conference Proceedings. Institute of Industrial and Systems Engineers (IISE). 770.
- Park, B. C., R. D. Foley, and E. H. Frazelle. 2006. “Performance of Miniload Systems with Two-Class Storage.” European Journal of Operational Research 170 (1): 144–155.
- Park, B. C., J. Y. Park, and R. D. Foley. 2003. “Carousel System Performance.” Journal of Applied Probability 40 (3): 602–612.
- Park, B. C., and Y. Rhee. 2005. “Performance of Carousel Systems with Organ-Pipe Storage.” International Journal of Production Research 43 (21): 4685–4695.
- Pazour, J. A., and R. D. Meller. 2011. “An Analytical Model for A-frame System Design.” IIE Transactions 43 (10): 739–752.
- Ramtin, F., and J. Pazour. 2014. “Analytical Models for an Automated Storage and Retrieval System with Multiple In-the-Aisle Pick Positions.” IIE Transactions 46 (9): 968–986.
- Ramtin, F., and J. A. Pazour. 2015. “Product Allocation Problem for an AS/RS with Multiple In-the-Aisle Pick Positions.” IIE Transactions 47 (12): 1379–1396.
- Rouwenhorst, B., B. Reuter, V. Stockrahm, G. J. Van Houtum, R. J. Mantel, and W. H. Zijm. 2000. “Warehouse Design and Control: Framework and Literature Review.” European Journal of Operational Research 122 (3): 515–533.
- Roy, D., S. Nigam, R. de Koster, I. Adan, and J. Resing. 2019. “Robot-Storage Zone Assignment Strategies in Mobile Fulfillment Systems.” Transportation Research Part E: Logistics and Transportation Review 122: 119–142.
- Sgarbossa, F., M. Calzavara, and A. Persona. 2019. “Throughput Models for a Dual-Bay VLM Order Picking System under Different Configurations.” Industrial Management & Data Systems 119 (6): 1268–1288.
- Staudt, F. H., G. Alpan, M. Di Mascolo, and C. M. T. Rodriguez. 2015. “Warehouse Performance Measurement: A Literature Review.” International Journal of Production Research 53 (18): 5524–5544.
- Su, C. T. 1995. “Intelligent Control Mechanism of Part Picking Operations of Automated Warehouse.” In Industrial Automation and Control: Emerging Technologies. International IEEE/IAS Conference. IEEE. 256–261.
- Su, W., L. Li, X. Zhou, and X. Liao. 2009. “Application of Optimized Dijkstra Algorithm in Storage/Retrieval Routes Scheduling of a Stacker Crane”. In International Conference on Information Engineering and Computer Science. IEEE. 1–4.
- Taljanovic, K., and A. Salihbegovic. 2009. “An Improved Wave Planning Technique for Material-To-Man Order Picking Operation.” In 18th International Conference on Software Engineering and Data engineering. SEDE. 155–160.
- Tranfield, D., D. Denyer, and P. Smart. 2003. “Towards a Methodology for Developing Evidence-Informed Management Knowledge by Means of Systematic Review.” British Journal of Management 14 (3): 207–222.
- Van den Berg, J. P. 1999. “A Literature Survey on Planning and Control of Warehousing Systems.” IIE Transactions 31 (8): 751–762.
- Van Gils, T., K. Ramaekers, A. Caris, and R. B. De Koster. 2018. “Designing Efficient Order Picking Systems by Combining Planning Problems: State-of-the-Art Classification and Review.” European Journal of Operational Research 267 (1): 1–15.
- Wang, H., W. Chen, and J. Wang. 2019. “Heterogeneous Multi-agent Routing Strategy for Robot-and-Picker-to-Good Order Fulfillment System”. In International Conference on Intelligent Autonomous Systems, 237–249. Springer, Cham.
- Wang, K., Y. Yang, and R. Li. 2019. “Travel Time Models for the Rack-Moving Mobile Robot System.” International Journal of Production Research. doi:10.1080/00207543.2019.1652778.
- Wu, C., and J. Mulgund. 1998. “Sequencing Order-Picking Operations for Automated Storage/Retrieval Systems.” Paper presented at the Annual Meeting of the Decision Sciences Institute 3: 1132–1134.
- Wu, Y., and Y. Wu. 2014. “Taboo Search Algorithm for Item Assignment in Synchronized Zone Automated Order Picking System.” Chinese Journal of Mechanical Engineering 27 (4): 860–866.
- Wu, Y., C. Zhou, Y. Wu, and X. T. Kong. 2017. “Zone Merge Sequencing in an Automated Order Picking System.” International Journal of Production Research 55 (21): 6500–6515.
- Xue, F., T. Dong, and Z. Qi. 2018. “An Improving Clustering Algorithm for Order Batching of E-commerce Warehouse System Based on Logistics Robots.” International Journal of Wireless and Mobile Computing 15 (1): 10–15.
- Yanyan, W., M. Shandong, and S. Changpeng. 2014. “Selecting Between Pick-and-Sort System and Carousel System Based on Order Clustering and Genetic Algorithm.” International Journal of Control and Automation 7 (4): 89–102.
- Yigong, W. Y. Z. 2008. “Order-Picking Optimization for Automated Picking System with Parallel Dispensers.” Chinese Journal of Mechanical Engineering 21 (6): 25–29.
- Yuan, Z., and Y. Y. Gong. 2017. “Bot-in-Time Delivery for Robotic Mobile Fulfillment Systems.” IEEE Transactions on Engineering Management 64 (1): 83–93.
- Zhao, X., Y. Wang, Y. Wang, and K. Huang. 2019. “Integer Programming Scheduling Model for Tier-to-Tier Shuttle-Based Storage and Retrieval Systems.” Processes 7 (4): 223–237.
- Zhu, H., Y. Y. Kok, A. Causo, K. J. Chee, Y. Zou, S. O. K. Al-Jufry, and K. H. Low. 2016. “Strategy-Based Robotic Item Picking from Shelves.” In Intelligent Robots and Systems (IROS). IEEE. 2263–2270.
- Zou, B., X. Xu, and R. De Koster. 2018. “Evaluating Battery Charging and Swapping Strategies in a Robotic Mobile Fulfillment System.” European Journal of Operational Research 267 (2): 733–753.