
Abstract
Assembly systems (ASs) have moved into the era of mass customisation and Industry 4.0 (I4.0). Mass customisation involves a shift from the production of high quantities of the same product to the production of low quantities of a high number of different products. This is changing the way in which companies assemble their products and has introduced a certain number of challenges. For example, there are increases in the numbers of parts to be moved, the quantities of data to be collected, and the skills of the human workers that companies must manage to meet their customers' demand. The adoption of I4.0 technologies can help companies to face these challenges. However, although companies and researchers have studied possible solutions based on I4.0 technologies for ASs and have introduced the concept of Assembly System 4.0 (AS4.0), no studies have tried to understand how these technologies impact on decision areas at the strategic, tactical, and operational levels. In this paper, we attempt to fill this gap through a systematic literature review that not only offers the opportunity to understand the current situation and the state of the art in this field but also gives an overview of possible future research challenges.
1. Introduction
In recent years, companies have been faced with changes in demand from their customers (Battaïa et al. Citation2018). In fact, customers are no longer passive clients who buy only the products that companies offer them but are now more often active clients who ask for personalised, customised products that are closer to their needs and desires (Pollard, Chuo, and Lee Citation2008; Kucukkoc and Zhang Citation2017). These customisations may involve, for example, a change in the colour (aesthetic design), the shape (measurement), or the technical characteristics of some components (functionality) (Piller Citation2005). Hence, if companies decide to accept these requests from their customers, they must be ready to manage the production of more complex product models (Otto and Li Citation2020) and their assembly systems should be agile and reconfigurable (Battaïa et al. Citation2018). In fact, a reconfigurable system is designed with a certain level of flexibility, that can involve the reconfiguration of human workers, technologies, and equipment, in order to be able to face the rapid change in market conditions (Hashemi-Petroodi et al. Citation2020a, Citation2020b; Yelles-Chaouche et al. Citation2020; Dolgui et al. Citation2021).
Products can be customised in different phases of a production cycle (Da Silveira, Borenstein, and Fogliatto Citation2001; Hu et al. Citation2011), for example during the design, fabrication, or assembly stages, or at the moment that they are bought by the final customers. In this paper, we focus on the assembly systems (ASs) where the mass customisation is especially performed. Such ASs can be composed of the following two parts: the assembly line subsystem (ALS) and the assembly line feeding subsystem (ALFS) (Battini et al. Citation2009b).
An ALS is a type of production system in which various tasks are executed, at one or more workstations, to create the final product (Rekiek et al. Citation2002; Dolgui and Proth Citation2010; Akpinar, Elmi, and Bektaş Citation2017; Zhong and Ai Citation2017). Although they have the word ‘line’ in their name, ALSs can be designed in different shapes, such as a two-sided line, a U-shape line, a system with rotary table, a fixed position, and so on (Becker and Scholl Citation2006; Battini et al. Citation2011; Battaïa and Dolgui Citation2013). However, the straight simple line is the most commonly used layout (Rabbani, Moghaddam, and Manavizadeh Citation2012; Mukund Nilakantan and Ponnambalam Citation2016), and, in fact, all types of layouts can be reconfigured or considered as a line in terms of how they work. Two main activities are executed in an ALS: the process, subassembly and assembly, which is related to the realisation of the final products by integrating together component parts and subassemblies; and control, which is related to monitoring of the quality and performance of the ALS (Hu et al. Citation2011; Battini et al. Citation2011).
The ALFS is responsible for the management and delivery of the components to the ALS (Battini et al. Citation2009b; Sali and Sahin Citation2016). The right component must be delivered in the right quantity, in the right container and at the right moment, to the right ALS. In order to achieve this, the three main activities of an ALFS are: transportation, preparation, and material management (Schmid and Limère Citation2019). Transportation involves the process of moving all components or parts from point A, where they are stored, to point B, where they are needed, while preparation relates to the processes of handling and repacking parts into the load carriers used for the corresponding line feeding policy. Finally, material management includes all processes related to the storage of components and products.
These subsystems need to be properly designed and managed in order to give an efficient and flexible AS, and several different decision areas have been defined in the literature, as summarised in Table .
Table 1. Decision areas at different levels of a traditional AS.
These decision areas may be associated with different levels, for example strategic, tactical, or operational levels. Strategic decisions have a long-term impact (measured in years) on the company’s operation, while tactical decisions impact operations in the medium term (over weeks), and operational decisions are made daily and have a short-term impact.
At the strategic level, decisions are made on the configuration of the system and the level of automation, for both ALSs and ALFSs. This means that companies must choose the product family has to be assembled and estimate how many resources are required by the family, how many ASs are necessary (for example, one flexible system for the whole product family or several more dedicated ones), the layout of their ASs, and the type of equipment, i.e. whether the different tasks associated with these systems are to be executed manually, automatically, or both (Bassan, Roll, and Rosenblatt Citation1980; Cormier and Gunn Citation1992; Roodbergen and Vis Citation2006; Wänström and Medbo Citation2009; Battini et al. Citation2011; Orru' et al. Citation2019; Fragapane et al. Citation2021).
At the tactical level, companies may carry out first workforce dimensioning (Dolgui et al. Citation2018), thus how many workers is necessary to function in worst case (large demand, complex product). Then this information together with time-and-motion and ergonomic analyses are necessary in order to design workplaces for the ALSs, and then assign these tasks to the workplaces using assembly line balancing algorithms (Lindenmeyer Citation2001; Boysen, Fliedner, and Scholl Citation2008; Battaïa and Dolgui Citation2013; Zülch and Zülch Citation2017). In the ALFS, decisions at this level firstly relate to how to deliver the different components to the ALS (Battini et al. Citation2009b; Caputo and Pelagagge Citation2011; Caputo et al., Citation2018; Arena et al., Citation2019), workforce dimensioning and then to the scheduling problem of who needs to deliver them (Mei et al. Citation2005; Dang et al. Citation2014).
At the operational level, the AS must work correctly, and therefore needs to be controlled. There can be also problems of reconfigurations when the product, production or demand change.
Different forms of data are collected from the AS in order to determine and control this process, for example the sequence of products produced in the ALS, the quantities of the components to stock in various warehouses, and the routes used to deliver these components to the ALS (Agrawal and Cohen Citation2001; DeCroix and Zipkin Citation2005; Hu et al. Citation2008; Battini et al. Citation2009a; Boysen, Kiel, and Scholl Citation2011; Gebser et al. Citation2018).
All these decisions need to be made for the AS in order to be able to generate the varieties of product required to meet customer demand. Despite the efforts of many companies, it is not easy to achieve mass customisation (Piller Citation2005; Piller Citation2007; Pollard, Chuo, and Lee Citation2008). This because companies need to be able to handle the three main elements of elicitation, process flexibility, and logistics if they want to attempt this goal (Radder and Louw Citation1999; Zipkin Citation2001; Blecker and Abdelkafi Citation2006; Roda et al. Citation2019; Hashemi-Petroodi et al. Citation2020a).
Process flexibility and logistics can be supported by Industry 4.0 (I4.0) technologies (Lasi et al. Citation2014; Shrouf, Ordieres, and Miragliotta Citation2014). I4.0 is the term used to refer to the fourth industrial revolution (Kirazli and Hormann Citation2015), which offers the opportunity to use new technologies such as collaborative robots (cobots), mobile robots, augmented reality (AR), virtual reality (VR), the Internet of Things (IoT), cloud computing and data analysis, etc. with the promise of increased flexibility, higher levels of automatisation, better quality, and improved productivity (Thames and Schaefer Citation2016; Zhong et al. Citation2017).
Companies and researchers are already studying the implementation of these technologies in relation to ASs and have introduced the concept of Assembly System 4.0 (AS4.0) (Bortolini et al. Citation2017; Cohen et al. Citation2019b). Bortolini et al. (Citation2017) studied how I4.0 technologies can impact in the AS4.0. In particular, they proposed and described in detail the distinctive characteristics of such technologies in these new systems. With the same purpose, Cohen et al. (Citation2019b) created a road map to understand and investigate the impact of I4.0 technologies on AS4.0, at the three impact levels: strategic, tactical, and operational. On each level they explored the different uses that the technologies can have in the AS4.0 and what is specific for AS4.0 in terms of functionalities and performances.
However, these researchers have mainly focused on the introduction of such systems or part of it, its proof-of-concept development, analysis of their characteristics and their performance, while in limited way they have investigated decisions in strategic, tactical, and operational levels applied to AS4.0, as it will be analysed in the following sections.
Thus, in line with the aims and scope of International Journal of Production Research, which is to disseminate research on decision aid on assembly systems among the others, we want to investigate how I4.0 technologies are likely to change the decision areas of an AS, and to provide an original vision of perspectives and challenges to the readers of IJPR and researchers in the production research field.
We pursue the main contribution of the paper answering the following three research questions: How are Industry 4.0 technologies applied to AS4.0? How do these technologies impact on the decision areas of AS4.0? What are the future needs of research into AS4.0? To answer these questions, we conducted a systematic review of the literature. In Section 2, the methodology used in this study is introduced. In Section 3, we present a descriptive analysis of the selected papers, and we analyse these in Section 4 and summarise the results in Section 5. Section 6 reflects on research challenges, and Section 7 concludes the work.
2. Methodology
In this section, following the guidelines outlined by Tranfield, Denyer, and Smart (Citation2003), we explain the process used to select the papers included in our review. In a systematic literature review, the steps applied to select the works need to be clearly defined, in order to create a process that is easily replicable (Seuring and Gold Citation2012). For this reason, we describe the decisions that were made in order to create a collection of papers, as follows:
Keywords: Based on the literature, two groups of keywords were defined, as shown in Table . The keywords in Group A were related to the main topic of these papers, i.e. the ALS and ALFS (Battaïa and Dolgui Citation2013; Battini et al. Citation2015; Bortolini et al. Citation2017; Schmid and Limère Citation2019). The choice of keywords in Group B was inspired by the work of Winkelhaus and Grosse (Citation2020) and is also supported by the literature on I4.0 (Schwab Citation2016; Culot et al. Citation2020) and assembly (Bortolini et al. Citation2017; Cohen et al. Citation2019b). We performed the search process, as suggested in Hosseini and Ivanov (Citation2020), based on a combination of keywords. Therefore, we used logical operators ‘AND’ and ‘OR’ to create Boolean keywords combinations as by Hosseini, Ivanov, and Dolgui (Citation2019), ‘(keyword of group A) AND (keyword of group B OR another keyword of group B)’, in order to generate the queries used in the Scopus database.
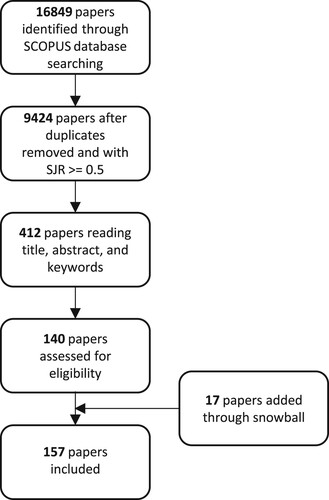
Refinement: We used several different combinations of criteria in the first refinement. We considered articles and reviews written in English as document types, limiting our search from January 2005 to December 2020. Following Winkelhaus and Grosse (Citation2020), we also considered only the subject areas of ‘Computer Science’, ‘Engineering’, ‘Economics’, ‘Management’, ‘Social Science’ and ‘Decision Science’. From these, we excluded papers in fields that were outside our scope of interest, for example biology, bioinformatics, fusion engineering, and design. A combination of the keywords with these limitations gave us an initial selection of 16,849 papers, which was reduced to 9424 after we removed duplicates and considered only journals with a Scimago Journal Rank (SJR) greater than or equal to 0.5. The SJR is an index used to describe the prestige of a journal (SCIMAGO Citation2020) and can be used to classify and select relevant journals (Falagas et al. Citation2008; Delgado-López-Cózar and Cabezas-Clavijo Citation2013).
Inclusion and exclusion criteria: From reading the title, abstract and keywords of the papers, we were able to identify works that addressed the use of the different I4.0 technologies in an AS. We were then able to remove all of the papers that were related to topics that were outside the scope of the review, which were not immediately identified as irrelevant in the first refinement step, e.g. material science, nanotechnology, and chemistry. Finally, we were left with 412 potentially relevant papers.
Second refinement: In this step, we read all of the articles in full. This allowed us to remove papers that appeared relevant from the abstract, but which turned out to be outside our scope once we read them in their entirety, for example papers that were related to AR or VR and which showed how the authors created their solutions but not how these were then implemented. Our vision of the domain as well as our appreciation of the scientific levels of papers were also used at this step. After this refinement, 140 papers remained.
Snowball search: At this stage, 17 articles were added through a backward snowball search, which was carried out in order to discover relevant papers that were not identified in the first phases. At the end of this step, 157 papers were selected for inclusion in this review.
Table 2. Groups of keywords related to ASs and I4.0.
Figure summarises the research process and shows the number of papers remaining at each step.
Figure 1. Flowchart of the different phases of the systematic literature review.
The final set of 157 papers was divided into two groups, representing the two different parts of the AS. In a few cases, the papers dealt with both subsystems, but we decided to assign each one to a specific subsystem based on the main scope of the research. In total, 90 articles were related to the ALS and 67 to the ALFS. As in Kumar et al. (Citation2020), our analysis is decomposed in a descriptive analysis (Section 3) and a content analysis (Section 4) both are based on these two sets of papers.
3. Descriptive analysis
A descriptive analysis of the papers included in this work is conducted in this section, with the aim of presenting some preliminary quantitative results and to motivate our work. These quantitative results are interesting, because they highlight the need for research of this type.
From Figure , we can see that the numbers of papers related to I4.0 technologies for ASs start to increase from 2015. In particular, the numbers of papers almost double each year from 2018, indicating an increase in the interest in this topic.
Figure 2. Number of papers examined by year of publication.
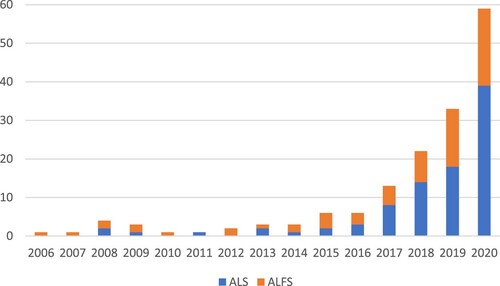
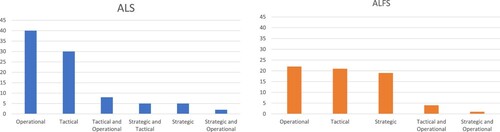
Figure shows that the papers related to the ALFS were well distributed over the strategic, tactical and operational levels, while this was not the case for the ALS. For the latter, researchers focused their attention at the operational level, and the topics were mostly related to the quality control of products or performance evaluations of the system.
Figure 3. Papers related to the AS, divided by level.
From Figure , it can be observed that almost all of the papers present a case study, experiments or simulations in order to study the technology that they are considering.
Figure 4. Papers related to the AS, divided by the methodology applied.
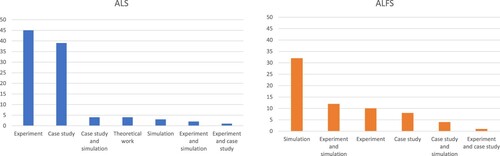
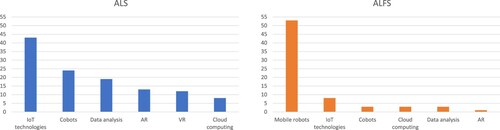
Figure shows the I4.0 technologies that are most frequently studied in relation to AS4.0. For the ALS, IoT technologies were the technology most commonly investigated (43 papers), followed by cobots (24 papers), Data Analysis (19 papers), AR (13 papers), and VR (12 papers). The papers related to the family of IoT technologies in our case include sensors, cyber physical systems (CPSs), digital twins and wearables. For the ALFS, we can see that the most widely adopted technologies are mobile robots (53 papers) and IoT technologies (8 papers). In summary, based on this figure, the main technologies related to AS4.0 are cobots, mobile robots, AR, VR, IoT, and cloud computing and data analysis. This categorisation of I4.0 technologies is based on the analysis of the selected papers. Their definitions in the following paragraph will help us in understanding their implementation in ASs and how they impact on decisions at strategic, tactical and operational levels.
Figure 5. Industry 4.0 technologies for AS.
Cobots are ‘robots intended to physically interact with human workers in a shared workplace’ (Djuric, Urbanic, and Rickli Citation2016). Mobile robots can be defined as ‘industrial robots that use a decentralized decision-making process for collision-free navigation to provide a platform for material handling, collaborative activities, and full services within a bounded area’ (Fragapane et al. Citation2021). AR is defined by Carmigniani et al. (Citation2011) as ‘a real-time direct or indirect view of a physical real-world environment that has been enhanced/augmented by adding virtual computer-generated information to it’. For Riva (Citation2002) VR is ‘A collection of technologies that allow people to interact efficiently with 3D computerized databases in real time using their natural senses and skills’. Xia et al. (Citation2012) state that ‘IoT technologies refers to the networked interconnection of everyday objects, which are often equipped with ubiquitous intelligence’. For Armbrust et al. (Citation2010) cloud computing refers ‘to both the applications delivered as services over the Internet and the hardware and systems software in the data centers that provide those services’. Oztemel and Gursev (Citation2020) say that data analysis is ‘having the capability to handle big amount of data and performing well defined analysis to be able to run the overall system aligned with the manufacturing goals’.
From Figure , we can see that there is scientific evidence that the system has changed. However, it is still necessary to study how I4.0 technologies are likely to impact decision areas associated with the design and management of ASs.
4. Content analysis
Krippendorff (Citation2004) defined content analysis as: [a] research technique for making replicable and valid inferences from texts (or other meaningful matter) to the contexts of their use.
Content analysis is a technique that involves specialised procedures; its results should be replicable and valid, and it should help researchers to describe and quantify specific phenomena (Downe-Wamboldt Citation1992; Krippendorff Citation2004). In this section, we divide the two sets of papers (on the ALS and ALFS) based on the level (strategic, tactical, and operational) at which they examine these technologies. The main purpose of this analysis is to help us to answer our three research questions, which we repeat here for the reader:
RQ1: How are Industry 4.0 technologies applied to AS4.0?
RQ2: How do these technologies impact on the decision areas of AS4.0?
RQ3: What are the future needs of research into AS4.0?
4.1. Strategic level in assembly system 4.0
A decision made at the strategic level will influence the decisions that can be made at the tactical and operational levels. A wrong decision made at this level can compromise an entire project, and it is therefore important for companies to understand clearly what they want to achieve.
Assembly Line Subsystem: The introduction of new I4.0 technologies such as cobots and assistive technologies to an AS offers the opportunity to create new, more dynamic and flexible configurations. However, it is important to understand how to introduce these technologies into an AS, and whether it is economically beneficial to introduce them. In view of this, two different methodologies for the configuration of a collaborative assembly workplace have been presented by Mateus et al. (Citation2019) and Stadnicka and Antonelli (Citation2019), and an economic evaluation of several different configurations was carried out by Peron, Sgarbossa, and Strandhagen (Citation2020). Mateus et al. (Citation2019) created a four-block procedure that takes into consideration the safety, ergonomics, and performance of the system, whereas the methodology proposed by Stadnicka and Antonelli (Citation2019) instead relies on the implementation of lean methods and tools. Both articles present a case study to demonstrate the validity of the methodologies. Peron, Sgarbossa, and Strandhagen (Citation2020) created a decision tree based on cost models, which was validated through simulation and a case study, to allow the user to understand when it is economically advantageous to create a configuration involving a cobot, AR or both.
The choice of a collaborative human-robot layout requires an understanding of the level of interaction that the human will have with the robot and the skills that will be necessary to make the system work. In order to identify these, Kolbeinsson, Lagerstedt, and Lindblom (Citation2019) proposed several levels of collaboration in their theoretical work, which can help companies that want to shift from automation to collaboration. After studying the state of the art in human-robot collaboration (HRC), Wang et al. (Citation2017) proposed a framework that considered the fundamental elements of an HRC scenario (the actors, work environment, workpieces and operations) to create a symbiotic collaboration between humans and robots. For Hashemi-Petroodi et al. (Citation2020b), a well-designed human-robot collaboration (HRC) system must consider the three features of resource skills, ergonomics, and resource flexibility. These authors evaluated these features to compare the interaction between humans and cobots in two different scenarios: dual resource-constrained and human-robot collaboration. The cooperation between humans and robots was also carefully investigated by Krüger, Lien, and Verl (Citation2009); through a survey, they studied the organisational and economic aspects of this collaboration. Cyber-physical production systems and human-robot interaction were examined by Yao et al. (Citation2018), and the framework that they proposed was validated based on an assembly case in which a human needed to move heavy parts frequently.
Cobots are not the only assistive technology that can be used in an AS; AR can be used to guide human workers in their tasks, while VR is mainly used for workplace design. However, before implementing these approaches, it is important to know how to use them and whether they will be convenient, and Danielsson, Holm, and Syberfeldt (Citation2020), Miller, Hoover, and Winer (Citation2020), and Marques et al. (Citation2020) therefore attempted to address these two points. Danielsson, Holm, and Syberfeldt (Citation2020) studied the state of the art in relation to the use of AR smart glasses, while Miller, Hoover, and Winer (Citation2020) focused their attention on the Microsoft HoloLens, and tried to mitigate its limitations in terms of input, field of view, tracking and occlusion. They developed a visualisation application in order to overcome these restrictions. Marques et al. (Citation2020) compared three different AR interaction methods for assembly procedures via experiments and a questionnaire. Their results can help in the choice of the best procedure, depending on the aims of the company. The creation of a layout containing an ALS, with or without a robot that can work together with a human, can be facilitated by the development of VR environments. Krishnamurthy and Cecil (Citation2018) created a virtual environment based on data collected by sensors, in which users could interact with the system, and studied different layout alternatives and assembly processes.
Assembly Line Feeding Subsystem: Although other technologies were also applied, mobile robots were the main technology explored in relation to the ALFS. These transportation devices, unlike other equipment such as forklifts, can open up opportunities to create new guide paths using different new methods. Antonelo, Schrauwen, and Van Campenhout (Citation2007) applied a machine learning technique called a reservoir computing network, and Mantegh, Jenkin, and Goldenberg (Citation2010) used harmonic functions and the boundary integral equation method to create different path planning algorithms. A Bézier curve and a genetic algorithm were the approaches applied by Song, Wang, and Sheng (Citation2016) and Elhoseny, Tharwat, and Hassanien (Citation2018), while Unhelkar et al. (Citation2018a) developed a mobile robot that was able to generate its path on a moving floor that was similar to a conveyer belt. Gao et al. (Citation2019) created a new path evaluation function to estimate the localisability of the mobile robots. The importance of spike latency in path planning was highlighted by Koul and Horiuchi (Citation2019), and a global path planning method based on an episodic-cognitive map was presented by Zou et al. (Citation2019). Moysis et al. (Citation2020) reported the performance of their chaotic path planning algorithm, which was enhanced with a pheromone-inspired memory technique. The energy limitations of mobile robots were taken into consideration by Jensen-Nau, Hermans, and Leang (Citation2020) when finding the optimal path based on a Voronoi-based generation algorithm.
The extensive implementation of sensors in mobile robots gives the opportunity to create new path configurations that can guarantee better performance in terms of both time and safety. Indeed, the sensors in mobile robots are controlled by an advanced hardware and control software that allows them to do autonomous operations and communicate with other resources in the dynamic environments in which they perform their tasks (Fragapane et al. Citation2021). A collision-free path study can be performed in a static environment (Al Al-Dahhan and Schmidt Citation2020; Das and Jena Citation2020; Saeed, Recupero, and Remagnino Citation2020), in a dynamic environment (Qu et al. Citation2009; Muthukumaran and Sivaramakrishnan Citation2019; Panda, Das, and Pradhan Citation2017), or both (Chang et al. Citation2020). Simulations and experiments were used by these authors to compare their results with other solutions and hence to determine the performance of their models. Al-Dahhan and Schmidt (Citation2020) and Saeed, Recupero, and Remagnino (Citation2020) first found possible solution paths, and then refined them to find the optimal path. In the models created by Muthukumaran and Sivaramakrishnan (Citation2019), Das and Jena (Citation2020), and Panda, Das, and Pradhan (Citation2017), each robot can take the optimal trajectory path without colliding with other robots or obstacles within the environment. Qu et al. (2009) proposed a model that needed to know in advance the environment in which it would be applied, while Chang et al. (Citation2020) proposed a solution that was able to adapt to the unknown environments in which mobile robots perform their activities.
Before implementing a technology, it is essential to understand whether it is convenient to use it and which technology would be best to use, based on what the company aims to do. In view of this, Fragapane et al. (Citation2020) carried out various simulations in an attempt to understand whether or not the use of mobile robots in a material handling system was advantageous. Fager et al. (Citation2019) used experiments in their work to compare paper-based picking, light-based picking and voice-based picking with the use of AR to support picking activities for kit preparation.
The use of IoT and cloud computing can help in creating new configurations for warehouses. Zhou et al. (Citation2019) applied these technologies to collect, store, and share data from different devices in real time in a warehouse, in order to compare two different layout configurations through a simulation.
4.2. Tactical level in assembly system 4.0
At this level, the company has already chosen the technologies that will be used, and now needs to make all the decisions required in order to allow these technologies to work.
Assembly Line Subsystem: The design of a workplace with an ALS may change if a cobot is introduced into it. Faccio et al. (Citation2020) highlighted that it is not only the type of cobot that influences the possible collaboration with human workers and the design of the workstation, but also the characteristics of the products that are being assembled. In their work, Gualtieri et al. (Citation2020) and Prati et al. (Citation2020) presented case studies of the transformation of a manual workplace into a collaborative one, with improvements in its productivity and physical ergonomics. In contrast, Michalos et al. (Citation2018b) presented a method for the transformation of a fully automated line to a collaborative one. This design, with or without a cobot, could be optimised using AR, VR, wearables and sensors. Michalos et al. (Citation2018a) examined the use of VR in a case study with the aim of reducing the time and cost requirements of the process, and achieving the design or redesign of a workplace. Wu et al. (Citation2020) and Yi et al. (Citation2020) proposed two different solutions based on the application of sensors to create a smart workplace. Havard et al. (Citation2019) used both VR and sensors to explore the design of a workplace containing a cobot. The optimisation of a workplace does not only involve the evaluation of production performance, and in order to determine whether it is well designed, an ergonomic evaluation may also be necessary. Enomoto, Yamamoto, and Suzuki (Citation2013), Azizi, Yazdi, and Hashemipour (Citation2019), and Peruzzini et al. (Citation2020a) used VR to design workplaces in which the ergonomic parameters of assembly tasks were respected. Gao, Shao, and Liu (Citation2016), Plantard et al. (Citation2017), Wu et al. (Citation2018), Xiao et al. (Citation2018) and Bortolini et al. (Citation2020) instead applied sensors to collect different forms of data in order to design an ergonomic workplace.
The data collected from time-and-motion and ergonomic analyses of an AS can then allow for the assignment of tasks within a workplace. Papakostas et al. (Citation2016) created a software application that could assign assembly tasks in an AS based on the data available at the moment of the request. Huo et al. (Citation2020a) and Huo, Zhang, and Chan (Citation2020b) developed two real-time monitoring systems that were capable of reassigning tasks based on the states of the different resources in the AS. A lack of data can lead to the incorrect assignment of tasks. Fantoni et al. (Citation2020) created a method of automatic time measurement that could precisely determine the duration of each task. An architecture based on four layers that could help to collect and share data, thus offering the opportunity to flexibly re-assign these tasks if necessary, was proposed by Qian et al. (Citation2020).
The balancing of an AS that implements several cobots requires a knowledge of which tasks can be executed by the cobots and which cannot. A method of assigning tasks to humans or robots based on their skills, regardless of workload balancing, was presented by Bruno and Antonelli (Citation2018), and Bilberg and Malik (Citation2019) created a digital twin for the same purpose. Two models for the assignment of tasks with the aim of minimising the cycle time were put forward by Weckenborg et al. (Citation2020) and Çil et al. (Citation2020). Dalle Mura and Dini (Citation2019) and El Makrini et al. (Citation2019) proposed two frameworks that also took into consideration the ergonomics of the human workers when allocating human-robot assembly tasks. Human workers can be trained before executing their tasks in the workplace using VR and AR (Yuan, Ong, and Nee Citation2008; Zhang, Ong, and Nee Citation2011; Hoedt et al. Citation2017). Galambos et al. (Citation2015) used VR to replicate a work environment in which humans could be trained by interacting with the system. The effects of oral, paper-based and AR-based instructions during assembly tasks were studied and compared by Vanneste et al. (Citation2020). An analysis of literature on workforce reconfiguration strategies in assembly lines, also considering the human-robot collaboration, is given in (Hashemi-Petroodi et al. Citation2020a).
The introduction of technologies such as IoT, wearables, and cloud computing to AS processes may require new frameworks or guides to enable an understanding of how to achieve this. Guo et al. (Citation2020a) tried to cover this gap by presenting step-by-step guidelines for the implementation and transformation of an AS to a AS4.0. Tan et al. (Citation2019) instead explained how it was possible to successfully implement a CPS in an AS.
Assembly Line Feeding Subsystem: After the choice to adopt mobile robots has been made, companies need to understand and determine how many of them are needed. Choobineh, Asef-Vaziri, and Huang (Citation2012) estimated this number for a fleet of mobile robots. The quantity required can be influenced by the feeding policies used by companies to bring the components to the ALS, and the use of mobile robots offers the opportunity to apply a range of different feeding policies. Boysen, Briskorn, and Emde (Citation2017), Yoshitake, Kamoshida, and Nagashima (Citation2019), Gharehgozli and Zaerpour (Citation2020), and Jiang et al. (Citation2020), for example, proposed different algorithms in which mobile robots were used to move entire shelves from a warehouse to an ALS. Groß and Dorigo (Citation2009) studied the possibility of connecting two or more mobile robots based on the type of object that they need to transport. Three different examples with collaborative robots were presented by Andersen et al. (Citation2017), Unhelkar et al. (Citation2018b), and Fager, Calzavara, and Sgarbossa (Citation2020). In the studies by Andersen et al. (Citation2017) and Fager, Calzavara, and Sgarbossa (Citation2020), a cobot was installed above a mobile robot. This solution was used in the former to feed an ALS, and in the latter to pick components from a warehouse for kit preparation. Unhelkar et al. (Citation2018b) instead studied the possibility of using a cobot with single-axis mobility to pick and transport the components needed to feed the ALS.
When a company has the required number of mobile robots and has decided how to feed the ALS, it is necessary to schedule the robots. Lo, Zhang, and Stone (Citation2020) created an algorithm for the scheduling of mobile robots that took into consideration both the tasks executed by the robots and their movements. Bocewicz, Nielsen, and Banaszak (Citation2014), Dang et al. (Citation2014), Caridá, Morandin, and Tuma (Citation2015), Zeng, Tang, and Yan (Citation2015), Petrović et al. (Citation2016), Zhou and Xu (Citation2018), Dang, Nguyen, and Rudová (Citation2019), Lyu et al. (Citation2019), Kousi et al. (Citation2019), Petrović, Miljković, and Jokić (Citation2019), Hari, Nayak, and Rathinam (Citation2020), and Rahman, Janardhanan, and Nielsen (Citation2020) proposed various algorithms for the scheduling of mobile robots. Cloud computing can help in optimising this scheduling. In their work, Nielsen et al. (Citation2017) created a cloud-based application that was responsible for all communication and exchange of data between mobile robots and the other actors in an ALS. The collection of these real-time data enabled scheduling of the mobile robots based on the current situation of the ALS. Wan et al. (Citation2017) proposed a context-aware cloud robotic entity for advanced material handling. This solution offered the opportunity to schedule mobile robots in a more energy-efficient and cost-saving way.
IoT can be applied to help with the design of a warehouse or the space needed by an ALS to stock materials. Lyu et al. (Citation2020) proposed an IoT solution that could optimise the positioning of the containers in a warehouse based on their dimensions, while Xu et al. (Citation2020) created a system that was aware of the number of goods stocked, and those which could be stocked, in a specific space in a warehouse. The IoT can also improve the performance of the warehouses. Lee et al. (Citation2018) demonstrate with a case study how the implementation of sensors in the warehouse generate a positive impact on the warehouse productivity, picking accuracy and efficiency.
4.3. Operational level in assembly system 4.0
At this level, a company must ensure that the technologies are able to work, and more importantly, it must enable them to continue to work as desired. This means that companies need to control not only whether a technology does what they want, but also how it does it. To achieve this, the AS must be constantly monitored, and if something is not working properly it must be fixed as quickly as possible.
Assembly Line Subsystem: Different sensors were used by Huang et al. (Citation2008), Bauters et al. (Citation2018), Li, Ota, and Dong (Citation2018), Faccio et al. (Citation2019), Alavian et al. (Citation2020), Baumann et al. (Citation2020), and Peruzzini, Grandi, and Pellicciari (Citation2020b) to collect data from machines, human workers, products, and various forms of equipment for use in an AS. These data were used to monitor and control the AS, and allowed the user to create a digital copy or digital twin of the all the actors in an AS. Bao et al. (Citation2020) explained how to create a digital twin application, and such applications were reviewed by Cimino, Negri, and Fumagalli (Citation2019), who then presented a case study of a digital twin for energy consumption monitoring. Zhuang, Liu, and Xiong (Citation2018) and Nikolakis et al. (Citation2019a) proposed two different digital twin solutions for monitoring an AS. The data necessary for this monitoring can be also obtained from videos and pictures of the AS, and Tarallo et al. (Citation2018), Oyekan et al. (Citation2019), and Chen et al. (Citation2020c) collected the data used in their studies from an analysis of videos and pictures of assembly activities. These data allowed the authors to monitor and improve the performance of the assembly processes under study.
Once collected, data need to be stored and analysed. Alexopoulos et al. (Citation2016), Alexopoulos et al. (Citation2018), and Guo et al. (Citation2020b) showed how cloud computing could be used not only to collect data but also to analyse them and to share the information created from them. The information generated in this way is important, because it allows a company to be aware of what is happening in an ALS. Liu, Li, and Wang (Citation2015a), Xu et al. (Citation2016), Liu et al. (Citation2017), Nuzzi et al. (Citation2020), Ruppert and Abonyi (Citation2020) and Tao, Leu, and Yin (Citation2020) used information created from the collection of real-time data as a basis for the operation of their solutions and to understand how to improve them.
Although the performance of an ALS can be improved through the introduction of cobots, it is important that these devices are controlled. Mohammed, Schmidt, and Wang (Citation2017) proposed a solution that used images of human operators taken with a depth camera and a virtual model of a robot for monitoring and collision detection. Nikolakis, Maratos, and Makris (Citation2019b) and Malik and Brem (Citation2020) proposed a CPS and a digital twin, respectively, to guarantee the safety of human workers who operate alongside a robot. Two different AR solutions that showed human workers the spaces in which they could perform their tasks without coming into contact with the robots were proposed by Hietanen et al. (Citation2020).
In their work, Liu et al. (Citation2015b) and Wang, Rizqi, and Nguyen (Citation2020b) studied AR and computer vision, respectively, as methods of guiding human workers in real time in the execution of their tasks, while Chen et al. (Citation2020b) used both AR and computer vision: AR as a guide for the human workers, and computer vision to monitor the assembly process. Although human workers can be guided during their activities, they may still make mistakes, and hence several solutions for greater control over the quality of the products, using different sensors and techniques, were proposed by Yu and Wang (Citation2013), Lei et al. (Citation2017), Colledani et al. (Citation2018), Jiang et al. (Citation2019), Chen et al. (Citation2020a), Negri et al. (Citation2020), Runji and Lin (Citation2020), Wagner et al. (Citation2020), Wang et al. (Citation2020a) and Židek et al. (Citation2020). The collection of information about these errors can allow a company to create databases of similar situations, which can then be studied in order to avoid them happening again. For example, Carvajal Soto, Tavakolizadeh, and Gyulai (Citation2019) and Sassi, Tripicchio, and Avizzano (Citation2019) used machine learning and deep learning, respectively, to analyse data collected from quality inspections of assembled products. A machine learning technique was also used by Kucukoglu et al. (Citation2018) to analyse the data collected by a digital glove and hence to reduce quality errors during assembly. Liu et al. (Citation2017) instead used computer vision to inspect the assembly process and to detect redundant objects that could compromise it.
Assembly Line Feeding Subsystem: As soon as a company has decided which mobile robots to use, based on a scheduling process, it then needs to decide on their routes. In view of this, Nishi and Tanaka (Citation2012), Ohnishi and Imiya (Citation2013), and Moussa and ElMaraghy (Citation2019) proposed three different methodologies for routeing mobile robots to enable them to carry out their activities. Two methods that can allow mobile robots to follow certain routes in dynamic environments were proposed by Walker, Garrett, and Wilson (Citation2006) and Posadas et al. (Citation2008).
Armesto et al. (Citation2008), Li et al. (Citation2014), Chien, Wang, and Hsu (Citation2017), Zhao et al. (Citation2018), Bencherif and Chouireb (Citation2019), Filotheou et al. (Citation2020), and Halawa et al. (Citation2020) focused their attention on the localisation of mobile robots in order to control them and to understand whether they were following the correct routes. Tracking the positions of mobile robots can help in increasing the performance of the ALFS, and the addition of other sensors can also improve also its safety. A range of different sensors were therefore applied to mobile robots and their environments by Huang et al. (Citation2015), Indri et al. (Citation2019), Keung et al. (Citation2020), and Luo et al. (Citation2019), to avoid collisions between them.
Mobile robots and human workers involved in transportation and preparation activities cannot do their work if they cannot find the components that they need to transport or pick. Tejesh and Neeraja (Citation2018) implemented a warehouse inventory management system that used sensors to monitor the mobility and storage of products throughout a company. The use of sensors in a warehouse and in an ASL can control the quantities of components present in each container in real time. The data generated by such sensors were used in works by Kartal et al. (Citation2016), Lolli et al. (Citation2017), and Lolli et al. (Citation2019), who applied three different machine learning techniques to analyse the collected data in order to optimise the inventory levels of the warehouses and the ALSs studied.
5. Insights
In this section, we aim to answer our first two research questions.
I4.0 technologies applications in AS4.0: The ways in which I4.0 technologies are applied in AS4.0, and hence the answer to RQ1, can be observed from Table which shows these different technologies based on the activities in which they have been implemented. For the ALS, the technologies are divided into the two activities of assembly and control, while for the ALFS, they are divided into the three activities of transportation, preparation, and material management. Table , in comparison with the results of previous works, like for example, those that focus more on how these technologies are generally used in AS4.0 (Cohen et al. Citation2019a; Cohen et al. Citation2019b), allows us to see where these technologies can create new opportunities or applications in the activities of the AS4.0, and particularly those areas in which they are not being used at the moment.
Table 3. I4.0 technologies for an AS, based on ALS and ALFS activities.
From Table , we can see that there are two groups of technologies (IoT/cloud computing and data analysis) that are used in all the activities of an AS4.0. This result is as expected, due to the nature of I4.0. IoT technologies allow companies to collect all the available data from the AS4.0 (Huang et al. Citation2008; Lee et al. Citation2018; Alavian et al. Citation2020; Xu et al. Citation2020). These data then need to be stored and shared, and cloud computing is very valuable in this regard (Papakostas et al. Citation2016; Alexopoulos et al. Citation2018; Guo et al. Citation2020b). Cloud computing can simultaneously offer both the resources needed to save and transform these data into information, using data analysis techniques, and then to deliver them to the users who need them (Lolli et al. Citation2017; Carvajal Soto, Tavakolizadeh, and Gyulai Citation2019).
Differences were seen for VR and mobile robots, as these two technologies were used only in the activities of the ALS (Galambos et al. Citation2015; Hoedt et al. Citation2017; Havard et al. Citation2019) and the ALFS, respectively (Choobineh, Asef-Vaziri, and Huang Citation2012; Kousi et al. Citation2019). Although this result was expected for the use of mobile robots, we did not expect this in the case of VR. In fact, we did not find any work that addressed the use of VR in an ALFS, despite the fact that it can be used in simulations, for example in the study of human workers working within the same space as mobile robots.
The use of cobots and AR was found in both ALSs and ALFSs. In particular, they were used in the preparation activities of ALFs, where they were applied to carry out picking and kitting (Andersen et al. Citation2017; Kim, Nussbaum, and Gabbard Citation2019; Fager, Calzavara, and Sgarbossa Citation2020; Fang and An Citation2020). In this scenario, a cobot can be installed above a mobile robot so it can do its tasks by following a human worker. For ALSs, it is interesting to note that AR was used to train and guide human assembly workers and to control the quality of the assembly (Westerfield, Mitrovic, and Billinghurst Citation2015; Michalos et al. Citation2018b; Hietanen et al. Citation2020; Vanneste et al. Citation2020).
I4.0 technologies impact on the decision areas of AS4.0: The ways in which these technologies impact on the decision areas of the AS4.0, and hence the answer to RQ2, can be seen from Tables and , which summarise the decisions that companies need to make when they decide to introduce a specific technology to their AS. These decisions are divided based on the different levels (strategic, tactical, and operational) at which they need to be made. They are also related to the decisions made in a traditional AS (see Table above). This allows us to see where each specific decision for each technology fits in with respect to more traditional methods. Tables and also allow us to answer RQ3, which relates to the future needs of research into AS4.0, and this is discussed in the next section.
Table 4. Decision areas divided into different levels for each I4.0 technology in an ALS.
Table 5. Decision areas divided into different levels for each I4.0 technology in the ALFS.
Strategic: When we talk about the configuration of the system for a technology in an AS4.0, we are referring to what it is necessary to know before deciding which technology would be best to implement in the AS. For example, the integration of a cobot into an AS can change the spaces that are necessary to allow the robot to work alongside humans, if a company wants to create instructions to train their human workers in a virtual environment, without the need for a real one, it may prefer to use VR. In contrast, if the company wants to guide their human workers during the execution of their tasks within the environment where they work, AR may be the best solution. Moreover, the decisions that are made in regard to the types of containers and the types of warehouse in which these will be used may influence the kind of sensors that can be applied to them and the transportation devices that can transport them. In view of all the data that can be collected, companies also now need to decide on the level of automation of their AS. This because the different forms of data that can be collected require different sensors and different techniques to analyse them. Moreover, on the type of information generated by the data analysis, the selection of the most proper device is very important. This information can be as simple as just numbers or text, but can also be more complex, such as pictures or videos. This choice depends not only on the type of information to deliver but also on who will receive it and which tasks have to be performed. For example, in the case of large products, wearable devices will be more preferable than fixed ones more useful in the case of small products assembled in standard workstations. Furthermore, the main purpose of using such technology will also affect its implementation and hence the level of automation of the ASs. The selected technology will influence the skills that will be required to use it. The company then needs to know whether it already has someone with these skills or whether it will have to hire or train someone. In the case where the company can rely on internal resources with such skills, the technology selection will be facilitated, as well as their implementation. This will also increase the general technological knowledge of the whole company in the case where these resources share their expertise. Furthermore, even if a company is not planning to implement any new technology in its AS4.0, a strategic decision may be to hire skilled human workers, with previous experience in I4.0 projects. These workers are valuable resources that could assist and guide the company toward the possible implementation of I4.0 technologies.
Tactical: When the technologies have been chosen, the company needs to design the workplace in which they will be used and to determine how they will be used. Some forms of technology, for example VR, can help in designing the workplaces where other technologies will be used. Indeed, VR provides the possibility of creating virtual environments where human workers can interact with the virtual elements and also where the technologies, like cobots and mobile robots, can be modelled. This facilitates the study of different workplace designs. As a result of the virtual environment different alternatives between the human workers and the technologies can be studied before their implementation in real workplaces. This helps to create optimal workplaces where technologies and human workers can interact with optimal results. The feeding policies determined by the company can also influence the design of the workplace, since the transportation of a container, like a pallet, may require a different space when it is delivered to the workplace, compared to the transportation of a shelf. A time analysis and decision aid may be necessary at this level in order to identify the numbers of cobots, workers, AR devices, or mobile robots that are required to execute the different tasks in the AS. In conjunction with this time analysis, it may be necessary to evaluate the ergonomic impact of the technologies while they are being used, in order to understand where and when it is best to use them. The time analysis and ergonomic impact can be evaluated due to the sensors applied in the technologies and by the human workers, such as IoT sensors or wearable devices. Another possibility is the combination of cameras that monitored the movements of the technologies and the human workers as a result of computer vision algorithms. At this level, a company is aware of which data it must collect and now needs to know where to install the sensors to collect these data. The sensors need to be installed in protected and proper places in order to reliably and safely collect the required data. Therefore, the significant amount of data that companies can collect from the sensors needs to be analysed and validated. This is because the next step is to decide what information the company is interested in creating from the collected data and how this information will be created. The final decision also relates to the issue of the final recipient of such information. It is important to create specific information for each user in order to avoid possible misunderstandings that can result in the execution of incorrect activities or decisions.
Operational: At this level, the technologies have been implemented and are working. The employees now need to know how to do their jobs, and the company needs to control them to ensure that they are doing them to the best of their ability. The daily activities that are assigned to cobots need to be sequenced based on the products that they are required to produce, and the routes of the mobile robots must be generated according to the paths that they need to take. The AR and VR equipment must also receive the information necessary for the human workers to carry out their activities. This information needs to be sequenced based on what activities the human workers will carry out when they are using the technology and it needs to be easily comprehensible and personalised. Indeed, there is a negative impact in the case of incorrect information, but also if the information is not understandable or clearly visible to the user. Therefore, a good control loop of accuracy and usability is important for continuously improving their utilisation. Moreover, the correct information, at the appropriate time and place, not only needs to be sent to the AR and VR devices, but also to all the actors in the AS4.0 that require it. This needs to be carried out efficiently whilst avoiding a possible loss of information during the communication process. Cloud computing can provide a way of sharing all this information, without the need for physical connections, across all of the devices in the AS that have the capacity to give them in output. All of this information can be generated using data analysis techniques and algorithms, and these need to be checked periodically to ensure that the parameters that they are using are still valid; alternatively, they may need to be updated, for example due to variation in customer demand. These techniques and algorithms also need to be updated if new techniques or algorithms that are more efficient are developed, or if they fail to work properly. It is not only the software aspects of the technologies that need to be checked; the hardware parts of technologies such as mobile robots, cobots, AR and VR devices also need to be periodically maintained and updated in order to avoid problems during the execution of their tasks. For example, the malfunctioning of the batteries that power the mobile robots affects their performance in terms of speed and autonomy, thereby having a negative impact on the performance of the AS4.0. Checking the hardware of the technologies can help to avoid not only losses in the performance of the AS4.0 but also in its security. It is therefore clear that appropriate maintenance measures are important for strictly controlling the reliability and availability of the hardware of the technologies.
6. Future research opportunities
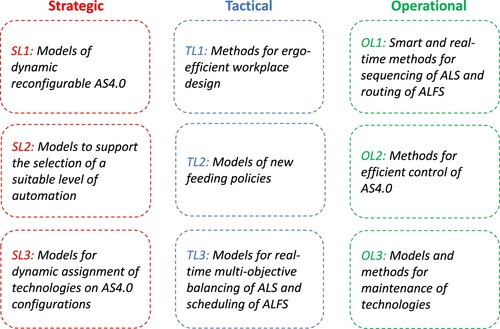
In this section, we explore possible future research into AS4.0, reported in Figure , to answer our third and final research question, RQ3. In order to achieve this, we use the knowledge acquired from the analysis presented in this work. This represents an attempt to inspire future researchers in the field of AS4.0 to address new research challenges that go beyond the study of the use of these technologies. We use the same classification as in Section 4, with future research opportunities divided based on strategic, tactical and operational levels. At the strategic level, the implementation of emerging technologies is investigated mainly through simulation. Indeed, simulation gives the opportunity to study, before the actual implementation, the benefits of the technologies under investigation, which ones performs better and how they perform and should be used. Given a positive outcome from simulation, the next step is to implement such technologies. The use of simulation allows for the investigation of a potentially infinite number of scenarios with a limited knowledge of the technology and its effects on the system. Consequently, decision makers, practitioners, engineers and managers can be made more aware of the behaviour of the system and its interaction with technologies. Moreover, it is mandatory to validate the simulation results, so some data collected from ad-hoc experiments or observations from previous applications are very helpful as input for the simulation, as well as validating its results.
Figure 6. Future research opportunities at the different levels.
At this point, at the tactical level, pilots are used to recreate real scenarios where technologies are under investigation mainly through experiments and in some cases with the observation of similar cases in order to tune their implementation by improving their performance. Simulation can still be used to study different situations starting from the data derived from the experiments. If the results of the experiments are positive, pilots are then extended and industrialised to be integrated with the rest of the facility. Finally, at the operational level, it is possible to study it through observations. These observations give the opportunity to obtain data to see if everything is working as it should be and to create simulations of possible future scenarios based on real data. In this case, experiments can still be used to investigate new ad-hoc solutions and so to feed simulation models with dedicated data. At the operational level, simulation is mainly used in order to exploit the potentialities of digital twins and so of predictive data-analytics, thereby gaining knowledge from data.
6.1. Strategic level
6.1.1. Research opportunities SL1: models of dynamic reconfigurable AS4.0
We observed that mobile robots and cobots were the two of the most frequently studied technologies. One aspect identified in our analysis that was not deeply investigated was related to the high level of reconfigurability that can be enabled from these two technologies, and especially from the use of mobile robots. In a reconfigurable system all the equipment, human workers, or material handling systems should be rapidly added, removed, modified or interchange in response to changing needs and opportunities. Due to their flexibility, mobile robots can facilitate companies in creating AS4.0 configurations (primarily networks rather than line configurations) that change dynamically based on the current demand. In fact, using mobile robots as a workplace in which human workers perform the assembly tasks, can give the opportunity to increase or decrease the number of workplaces that are needed based on the demand and the same mobile robots can also be used to transport all the components that the human workers need for each task (Battaïa et al. Citation2018). Moreover, a mobile robot can be equipped with a cobot to create a collaborative mobile robot that can pick and transport components and then execute assembly tasks based on the same components. Although these approaches can be easily adopted to create different AS4.0 configurations, it is essential to understand which is the best configuration, in terms of performance and cost, based on the situation under study. Future studies should therefore focus on mathematical and simulation modelling of the different configurations created by these two technologies. These models will allow us to determine the parameters that can affect the reconfigurability of the system. Sensitivity analyses will also be useful to study how these parameters can change the reconfigurability and the performance of the different configurations. In the end, decision support systems, like decision trees and evolutionary algorithms, can be created in order to support decision makers in determining which is the best configuration to adopt based on their needs.
6.1.2. Research opportunities SL2: models to support the selection of a suitable level of automation
I4.0 technologies can be used to execute a task or to collect and share data, for example to assist operators or to support managers. Hence, the choice of a technology is not only related to the help that it can give in terms of the physical and cognitive aspects of the execution of a task, but also to the data that can be collected and shared with it. A huge amount of data can be collected and sent to the AS4.0, and new models are needed to support decision makers in regard to how to automatise the AS4.0. These models can provide a methodological toolbox that can guarantee a structured implementation of the technologies to ensure a suitable level of automation for AS4.0. For example, decisions that need to be made on the most suitable amount of information to give to the operator through AR or assistive technologies (which relates to the level of collaboration between operators and collaborative robots), or on the configuration of the systems, can be made by managers based on the available data. To create these models, further research is required specifically in order to deepen our existing knowledge of the case where multiple technologies work together to complete different tasks. Simulations and experiments are needed in order to validate these models. The results from these methods, together with the possibility to do sensitive analysis, give the opportunity to evaluate different cases with advanced data analytics tools that in the end can create decisional support systems. Companies can benefit from these results since they will help them simplify the decision process of the level of automation to adopt in their AS4.0.
6.1.3. Research opportunities SL3: models for dynamic assignment of technologies on AS4.0 configurations
We have seen that at this level, companies have to choose the configuration and the level of automation of their AS4.0. It can be that the choice of a configuration compromises the possibility of using a specific technology and instead that technology is most appropriate for another kind of configuration. Moreover, the performance of the AS4.0 is correlated to the combination of configurations and technologies, with synergic effects in some cases. Therefore, at this level, to determine the goals of the AS4.0 that the companies want to obtain, it is necessary to have a guide that supports decision makers in the correct assignment of the different technologies to the configurations under analysis. The decision of the assignment of the technologies on the different configurations will facilitate other decisions, such as, for example, the number of devices to buy and the skills that are necessary in the different configurations. In order to understand if a technology is good or not for a specific configuration, future research should consider its behaviour and performance in different configurations. Case studies, experiments and simulations represent opportunities to collect the necessary data to create new decisional support systems to guide companies in better deciding which configurations to implement for the different technologies. It will also be important to study the behaviour and performance of more technologies together and the interaction between the technologies and the human workers to see if their implementation together generates issues in the configuration or not.
6.2. Tactical level
6.2.1. Research opportunities TL1: methods for ergo-efficient workplace design
When a human worker is involved in the execution of activities in the AS4.0, he or she should be able to do these without worrying about the workplace in which these activities need to take place. To enable this, the workplace needs to be optimised, and VR can be used in this instance to help create virtual environments that replicate the real AS, to allow a user to design and study a range of configurations of workplaces without needing a physical model. These virtual solutions need to be further investigated, and new parameters such as the ages of the human workers or the integration of additional technologies into virtual environments should be evaluated. Different human characteristics may require different workplace design solutions in order to facilitate high levels of ergonomic comfort for manual processes and to increase efficiency. Data collected from human workers while they are executing their activities can be used to adapt the workplace based on the tasks that need to be executed within the workplace and the characteristics of the human worker that is executing them. Motion capture (mocap) systems can be used to collect these data. A mocap system gives the opportunity to create a virtual copy of the object that is under study by utilising sensors or cameras to recreate its movements. Experiments are first needed in order to determine the relevant parameters for optimising a workstation, and case studies will then be required to verify whether these parameters are correct, in order to design a workplace that is not just optimal in terms of performance but is also efficient in terms of human well-being. In relation to the acceptance of technology, further studies could provide insight into the factors affecting success. Data analysis and Artificial Intelligence techniques can be useful at this step.
6.2.2. Research opportunities TL2: models of new feeding policies
The use of mobile robots, with or without a cobot, can open up the possibility of creating new feeding policies, since if these are used to move shelves, each level of the shelves can be designed to store different components in different ways. For example, although a kit can be stored at one level, while only one type of component can be stored at another level, the shelf may be delivered to one or more workplaces. Instead, if mobile robots are used in conjunction with a cobot, these collaborative mobile robots can be used to pick the individual components from warehouses or supermarkets and to transport them to the ALSs that need them. In order to study these new opportunities, advanced modelling and simulations and then real case studies will be needed, to validate the results of the models. Moreover, AR can be used to support the human workers involved in feeding tasks by giving them instructions such as which component to pick, where to put the components, and how many components to pick. When AR is used together with mobile robots, the two technologies need to be integrated. This means that the AR instructions should not only able to change based on the demand for products but also based on the characteristics of the mobile robots that are used to execute the feeding policies. In addition, these AR instructions need to change based on the components that the human workers have to pick and must be visible and in the correct position for the particular type of mobile robot that is used. Further investigation and testing through experiments that replicate real scenarios can better highlight the strengths, weaknesses, and the potential advantages that the use of AR with mobile robots can generate in terms of developing new feeding policies.
6.2.3. Research opportunities TL3: models for real-time multi-objective balancing of ALS and scheduling of ALFS
The balancing of the new ALS needs to take into account not only the assignment of the different tasks within the different workplaces, but also the technologies that will be used in the ALS. However, no research has yet studied how these technologies can affect line balancing. For example, the choice to adopt AR to support operators in executing the tasks is not yet well-investigated and in particular the impact on the balancing of the ALS. In any case, the use of AR is very interesting since it can help to reduce line balancing effort for the ALS by creating flexible, dynamic, self-balancing ALSs in which the number of workplaces may change based on the current demand from customers. Hence, if demand is low, a single operator may be able to do all the tasks in one workplace, thanks to the use of AR, whereas if demand grows, the number of workplaces can increase, and the AR instructions will need to be divided between the workstations. One avenue for future research would be to investigate the number of AR devices that are needed and the ways in which the instructions that they display to the human workers need to change. The various types of mobile robots, which may or may not have a cobot mounted on them, allow for new tasks to be carried out in the ALS and in the ALFS. For example, we saw that a mobile robot with a cobot can pick up a component from the warehouse, transport it to the ALFS, and then execute a task based on this component in the ALS. The new dynamic network configurations that have become possible require new assembly line balancing methods that consider the evolutionary aspects of such configurations, with multi-period and multi-objective models that can be applied in real time to adapt the workload of the workstations without affecting the work of the operators. Economic, performance, and ergonomic objectives should be considered together.
A mobile robot can be used solely as a workplace or as a transportation device. Different mobile robots can carry out different tasks, giving rise not only to new opportunities but also to a more complex problem in relation to scheduling these mobile robots. A company needs to optimise the use of its mobile robots according to the tasks that they are able to do, and new scheduling models therefore need to be created that can consider all the possible tasks that these mobile robots can carry out. These models first need to be studied through simulations, and then with experiments or case studies in order to verify the results. A connection between the different actors in an AS4.0, thanks to all the sensors and hence the collected data, can allow for synchronised assembly line balancing and scheduling in order to simultaneously optimise both the assembly and the activities needed to deliver the components. Future investigations into methodologies for dynamic and synchronised assembly line balancing and scheduling of the AS4.0 are needed in order to allow companies to use their technologies in an optimal way.
6.3. Operational level
6.3.1. Research opportunities OL1: smart and real-time methods for sequencing of ALS and routeing of ALFS
ALSs need to know the sequence of products that they have to assemble on a daily basis, and mobile robots need to know the routes to follow to arrive at their destinations. Algorithms developed in the future to solve these problems will need to take into consideration the new information generated by the AS4.0 in a predictive and prescriptive way, which will involve not only reacting to the changes required but also anticipating them and adapting in a proactive way. For example, a new sequencing algorithm may consider the fatigue of the human workers when deciding which products to assemble or which workers should execute the tasks to make them. If the human workers are tired, it may be possible to sequence products that are easy to assemble, or to let the workers take a break to recover their energy. Sequencing can be done at the same time as routeing when the products to be assembled are determined with the goal of minimising the routes travelled by the mobile robots. Sequencing should also take into account the quantity of components stored in the warehouses and supermarkets, i.e. to optimise inventory management by reducing stocked quantities by as much as possible. Sequencing and routeing can be synchronised to allow products in an ALS to be assembled using only the components that are closest to that ALS. To achieve this, the routeing of the mobile robots must consider their positions in real time; only the mobile robots closest to the components will be used to transport them to the ALS. This synchronised sequencing and routeing can reduce the travelling time of the mobile robots and can also increase the productivity of the ALS, since the components are delivered more quickly.
6.3.2. Research opportunities OL2: methods for efficient control of AS4.0
Today, it has become possible for the first time to control the quality of the products, the assembly activity, and all the activities of an AS4.0. This is facilitated by the huge amounts of data that can be collected from an AS4.0 if its activities are monitored, including data from each step of the assembly tasks, from the products being assembled, from the mobile robots while they are working and so on. After collection, these data need to be understood and analysed, in order to allow companies to use them. Data analysis techniques can be applied to these data to give useful information as output. New machine learning and artificial intelligence algorithms that transform data into information can be developed by studying the different activities of the AS4.0. Simulations will be useful in order to understand the performance of the methods, and experiments with real scenarios should then be carried out. It is important that the right data are collected to ensure the success of these methods and to give valid results, and more research is needed to identify the factors that make a data analysis technique reliable. Surveys of practitioners can help in developing an understanding of the factors that can increase reliability. More reliable are the results of a data analysis technique and more precise can be the control of the AS4.0. At the same time higher can be the benefits that can be generate from these analyses. In the material management activity, for example, the adoption of data analysis techniques can open the opportunity to optimise the stock of materials in the warehouses and workplaces, and at the same time the flows of these materials in the AS4.0 in a dynamic and real-time way, such as dynamic Kanban systems, dynamic replenishment, integrated replenishment policies. New objective functions, for a dynamic and synchronised stock and flow of the material, can be defined in order to improve the performance of material management in an AS4.0. Benefitting from all these data and information, it is possible to model all, or parts of, the AS4.0 in order to create its digital twin. The digital twin of the AS4.0 gives the opportunity to control in real-time what is happening in the AS4.0 and to simulate what can happen in the future using predictive analysis models. Indeed, it allows us to see, for example, how mobile robots work in a single day and then simulate their performance for an entire week. This simulation can be useful for understanding whether the mobile robots will decrease their performance or not after a period of continuous work. Although digital twins have significant potential, it is important to understand what it is relevant to monitor. Therefore, future studies can be orientated towards understanding which digital copies are most important to create based on the characteristics of the AS4.0. Case studies, experiments and interviews with the practitioners can help to create frameworks to follow to create the digital copies whilst simultaneously verifying their reliability.
6.3.3. Research opportunities OL3: models and methods for maintenance of technologies
As discussed in the previous section, both the software and hardware aspects of these technologies need to be controlled and updated. All of the sensors in the AS4.0, the mobile robots, and the AR devices must operate without problems over their lifetimes. For example, the sensors must collect all of the appropriate data without missing any, and the mobile robots must run at a certain speed to execute their tasks. The development of new models and methods for the maintenance of these technologies, both predictive and proactive, should therefore be a subject for future study. These models and methods can help to avoid a loss of performance of the AS4.0 due to hardware problems with the technologies. It is important that these methods recognise when the performance of a particular technology is reduced, even if problems are not evident, and when it must be replaced by a new model. Technology must also be replaced when it becomes obsolete. New data analysis techniques should be created, creating predictive analytics models, to predict when both of these situations are likely to occur. The information created by these techniques can then be sent to the technologies that are recognised as obsolete or that are not working properly to make them stop working. Once they stop, they can be evaluated in order to understand whether to fix or dispose of them.
7. Conclusion
The systematic literature review presented here reveals that despite the benefits that I4.0 technologies can bring to ASs, it is necessary to carry out more research in order to exploit their full potential. Researchers should not limit themselves to studies of how a technology works. Although these are important, they are not sufficient, since this technology will be implemented in a complex environment such as an AS. In an AS, each technology does not operate alone but is integrated into a process that involves several actors, such as human workers, machinery, and other technologies. Each actor has certain tasks to complete, which may require cooperation from two or more other actors. Moreover, companies need to know which decisions they must make when they want to plan to use a technology (strategic level), when they have to decide which technology to use (tactical level), and when they are using this technology (operational level). For these reasons, we first reviewed how these different technologies were used in ASs as part of their activities, and then proposed a future research agenda that can be followed in order to start to reduce the gaps highlighted here. In particular, have seen that the creation of the new AS4.0 requires the study of new advanced solutions at three different levels (strategic, tactical and operational). At the strategic level, one of the most interesting challenges in the AS4.0 is to understand which technologies to use in order to create reconfigurable AS4.0s. It is important to understand first what is required to create a reconfigurable system and then how the technologies can help in developing one. Mathematical optimisation models can be created and then simulated to generate multi-case scenarios that can help the development of decision support systems to help to choose the configuration of the AS4.0 and which technologies to use in it. At the tactical level, the AS4.0 is characterised by the multi-purpose use of the technologies. Therefore, at this level, the challenges are related with the creation of models and methods that can solve multi-objective problems (time, ergonomics, costs, energy and others) that can involve the design of the AS4.0 and their feeding, balancing and scheduling. At the operational level, the major challenges that we individuated are related to the daily control of the technologies in order to make them work and to keep them working with the same efficiency in order to do not compromise the performance of the AS4.0. Therefore, to make this happen, it is necessary to create data-driven models and methods to control and maintain the technologies and the AS4.0. Moreover, the development of predictive analytics models based on the huge amount of data available from sensors that can forecast the behaviour of the technologies and the performances of the AS4.0 can be an interesting challenge for future studies. We hope that researchers who are already studying or intend to study this topic can find useful ideas in this work and will be inspired to create new ones.
DAS statement
‘The authors confirm that the data supporting the findings of this study are available within the article’.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Notes on contributors

Alexandre Dolgui
Alexandre Dolgui is an IISE Fellow, Distinguished Professor, and the Head of Automation, Production and Computer Sciences Department at the IMT Atlantique, France. His research focuses on manufacturing line design, production planning and supply chain optimisation. His main results are based on the exact mathematical programming methods and their intelligent coupling with heuristics and metaheuristics algorithms. He is author or co-author of about 270 publications in refereed international journals, and has received several international research awards. He has been Program or General chair of many leading international conferences. He is Member of the Editorial Board of many journals, including the International Journal of Production Economics. He is the Editor-in-Chief of the International Journal of Production Research.

Fabio Sgarbossa
Fabio Sgarbossa is Full Professor of Industrial Logistics at the Department of Mechanical and Industrial Engineering (MTP) at NTNU (Norway) from October 2018. He was Associate Professor at University of Padova (Italy) where he also received his PhD in Industrial Engineering in 2010. He is leader of the Production Management Group at MTP, and he is responsible of the logistics 4.0 Lab at NTNU. He has been and he is involved in several European and National Projects. He is author and co-author of about 120 publications in relevant international journals, about industrial logistics, material handling, materials management, supply chain. He is member of Organizing and Scientific Committees of several International Conferences, and he is member of editorial boards and associate editor in relevant International Journals.

Marco Simonetto
Marco Simonetto is a PhD candidate at the Department of Mechanical and Industrial Engineering (MTP) at NTNU (Norway). He has a master's degree in Management Engineering from University of Padova (Italy). His research interests include assembly systems, Industry 4.0, and material feeding.
References
- Agrawal, N., and M. A. Cohen. 2001. “Optimal Material Control in an Assembly System with Component Commonality.” Naval Research Logistics (NRL) 48 (5): 409–429.
- Akpinar, S., A. Elmi, and T. Bektaş. 2017. “Combinatorial Benders Cuts for Assembly Line Balancing Problems with Setups.” European Journal of Operational Research 259 (2): 527–537.
- Al-Dahhan, M. R. H., and K. W. Schmidt. 2020. “Voronoi Boundary Visibility for Efficient Path Planning.” IEEE Access 8: 134764–134781.
- Alavian, P., Y. Eun, S. M. Meerkov, and L. Zhang. 2020. “Smart Production Systems: Automating Decision-Making in Manufacturing Environment.” International Journal of Production Research 58 (3): 828–845.
- Alexopoulos, K., S. Makris, V. Xanthakis, K. Sipsas, and G. Chryssolouris. 2016. “A Concept for Context-Aware Computing in Manufacturing: The White Goods Case.” International Journal of Computer Integrated Manufacturing 29 (8): 839–849.
- Alexopoulos, K., K. Sipsas, E. Xanthakis, S. Makris, and D. Mourtzis. 2018. “An Industrial Internet of Things Based Platform for Context-Aware Information Services in Manufacturing.” International Journal of Computer Integrated Manufacturing 31 (11): 1111–1123.
- Andersen, R. E., E. B. Hansen, D. Cerny, S. Madsen, B. Pulendralingam, S. Bøgh, and D. Chrysostomou. 2017. “Integration of a Skill-Based Collaborative Mobile Robot in a Smart Cyber-Physical Environment.” Procedia Manufacturing 11: 114–123.
- Antonelo, E. A., B. Schrauwen, and J. Van Campenhout. 2007. “Generative Modeling of Autonomous Robots and Their Environments Using Reservoir Computing.” Neural Processing Letters 26 (3): 233–249.
- Arena, S., F. Doneddu, and M. T. Pilloni. 2019. “Optimization of Brewing and Beverage Packaging Process using V-Graph Analysis.” XXIV Summer School "Francesco Turco"-Industrial Systems Engineering 1: 307–313.
- Armbrust, M., A. Fox, R. Griffith, A. D. Joseph, R. Katz, A. Konwinski, G. Lee, et al. 2010. “A View of Cloud Computing.” Communications of the ACM 53 (4): 50–58.
- Armesto, L., G. Ippoliti, S. Longhi, and J. Tornero. 2008. “Probabilistic Self-Localization and Mapping-an Asynchronous Multirate Approach.” IEEE Robotics & Automation Magazine 15 (2): 77–88.
- Azizi, A., P. G. Yazdi, and M. Hashemipour. 2019. “Interactive Design of Storage Unit Utilizing Virtual Reality and Ergonomic Framework for Production Optimization in Manufacturing Industry.” International Journal on Interactive Design and Manufacturing (IJIDeM)) 13 (1): 373–381.
- Bao, Q., G. Zhao, Y. Yu, S. Dai, and W. Wang. 2020. “Ontology-Based Modeling of Part Digital Twin Oriented to Assembly.” Proceedings of the Institution of Mechanical Engineers, Part B: Journal of Engineering Manufacture. doi:https://doi.org/10.1177/0954405420941160.
- Bassan, Y., Y. Roll, and M. J. Rosenblatt. 1980. “Internal Layout Design of a Warehouse.” AIIE Transactions 12 (4): 317–322.
- Battaïa, O., and A. Dolgui. 2013. “A Taxonomy of Line Balancing Problems and Their Solution Approaches.” International Journal of Production Economics 142 (2): 259–277.
- Battaïa, O., A. Otto, F. Sgarbossa, and E. Pesch. 2018. “Future Trends in Management and Operation of Assembly Systems: From Customized Assembly Systems to Cyber-Physical Systems.” Omega 78: 1–4.
- Battini, D., M. Faccio, A. Persona, and F. Sgarbossa. 2009a. “Balancing–Sequencing Procedure for a Mixed Model Assembly System in Case of Finite Buffer Capacity.” The International Journal of Advanced Manufacturing Technology 44 (3–4): 345–359.
- Battini, D., M. Faccio, A. Persona, and F. Sgarbossa. 2009b. “Design of the Optimal Feeding Policy in an Assembly System.” International Journal of Production Economics 121 (1): 233–254.
- Battini, D., M. Faccio, A. Persona, and F. Sgarbossa. 2011. “New Methodological Framework to Improve Productivity and Ergonomics in Assembly System Design.” International Journal of Industrial Ergonomics 41 (1): 30–42.
- Battini, D., M. Gamberi, A. Persona, and F. Sgarbossa. 2015. “Part-Feeding with Supermarket in Assembly Systems: Transportation Mode Selection Model and Multi-Scenario Analysis.” Assembly Automation 35: 149–159.
- Baumann, D., F. Mager, U. Wetzker, L. Thiele, M. Zimmerling, and S. Trimpe. 2020. “Wireless Control for Smart Manufacturing: Recent Approaches and Open Challenges.” Proceedings of the IEEE 109: 441–467.
- Bauters, K., J. Cottyn, D. Claeys, M. Slembrouck, P. Veelaert, and H. Van Landeghem. 2018. “Automated Work Cycle Classification and Performance Measurement for Manual Work Stations.” Robotics and Computer-Integrated Manufacturing 51: 139–157.
- Becker, C., and A. Scholl. 2006. “A Survey on Problems and Methods in Generalized Assembly Line Balancing.” European Journal of Operational Research 168 (3): 694–715.
- Bencherif, A., and F. Chouireb. 2019. “A Recurrent TSK Interval Type-2 Fuzzy Neural Networks Control with Online Structure and Parameter Learning for Mobile Robot Trajectory Tracking.” Applied Intelligence 49 (11): 3881–3893.
- Bilberg, A., and A. A. Malik. 2019. “Digital Twin Driven Human–Robot Collaborative Assembly.” CIRP Annals 68 (1): 499–502.
- Blecker, T., and N. Abdelkafi. 2006. “Mass Customization: State-of-the-Art and Challenges.” In Mass Customization: Challenges and Solutions. Vol. 87, 1–25. Boston, MA: Springer.
- Bocewicz, G., I. Nielsen, and Z. Banaszak. 2014. “Automated Guided Vehicles Fleet Match-Up Scheduling with Production Flow Constraints.” Engineering Applications of Artificial Intelligence 30: 49–62.
- Bortolini, M., M. Faccio, M. Gamberi, and F. Pilati. 2020. “Motion Analysis System (MAS) for Production and Ergonomics Assessment in the Manufacturing Processes.” Computers & Industrial Engineering 139: 105485.
- Bortolini, M., E. Ferrari, M. Gamberi, F. Pilati, and M. Faccio. 2017. “Assembly System Design in the Industry 4.0 Era: A General Framework.” IFAC-PapersOnLine 50 (1): 5700–5705.
- Boysen, N., D. Briskorn, and S. Emde. 2017. “Parts-to-Picker Based Order Processing in a Rack-Moving Mobile Robots Environment.” European Journal of Operational Research 262 (2): 550–562.
- Boysen, N., M. Fliedner, and A. Scholl. 2008. “Assembly Line Balancing: Which Model to Use When?” International Journal of Production Economics 111 (2): 509–528.
- Boysen, N., M. Kiel, and A. Scholl. 2011. “Sequencing Mixed-Model Assembly Lines to Minimise the Number of Work Overload Situations.” International Journal of Production Research 49 (16): 4735–4760.
- Bruno, G., and D. Antonelli. 2018. “Dynamic Task Classification and Assignment for the Management of Human-Robot Collaborative Teams in Workcells.” The International Journal of Advanced Manufacturing Technology 98 (9): 2415–2427.
- Caputo, A. C., and P. M. Pelagagge. 2011. “A Methodology for Selecting Assembly Systems Feeding Policy.” Industrial Management & Data Systems 111: 84–112.
- Caputo, A. C., P. M. Pelagagge, and P. Salini. 2018. “Selection of Assembly Lines Feeding Policies Based on Parts Features and Scenario Conditions.” International Journal of Production Research 56 (3): 1208–1232.
- Caridá, V. F., O. Morandin, and C. C. M. Tuma. 2015. “Approaches of Fuzzy Systems Applied to an AGV Dispatching System in a FMS.” The International Journal of Advanced Manufacturing Technology 79 (1–4): 615–625.
- Carmigniani, J., B. Furht, M. Anisetti, P. Ceravolo, E. Damiani, and M. Ivkovic. 2011. “Augmented Reality Technologies, Systems and Applications.” Multimedia Tools and Applications 51 (1): 341–377.
- Carvajal Soto, J. A., F. Tavakolizadeh, and D. Gyulai. 2019. “An Online Machine Learning Framework for Early Detection of Product Failures in an Industry 4.0 Context.” International Journal of Computer Integrated Manufacturing 32 (4–5): 452–465.
- Chang, L., L. Shan, C. Jiang, and Y. Dai. 2020. “Reinforcement Based Mobile Robot Path Planning with Improved Dynamic Window Approach in Unknown Environment.” Autonomous Robots, 1–26.
- Chen, B., Y. Liu, C. Zhang, and Z. Wang. 2020a. “Time Series Data for Equipment Reliability Analysis with Deep Learning.” IEEE Access 8: 105484–105493.
- Chen, C., Z. Tian, D. Li, L. Pang, T. Wang, and J. Hong. 2020b. “Projection-based Augmented Reality System for Assembly Guidance and Monitoring.” Assembly Automation.
- Chen, C., C. Zhang, T. Wang, D. Li, Y. Guo, Z. Zhao, and J. Hong. 2020c. “Monitoring of Assembly Process Using Deep Learning Technology.” Sensors 20 (15): 4208.
- Chien, C. H., W. Y. Wang, and C. C. Hsu. 2017. “Multi-Objective Evolutionary Approach to Prevent Premature Convergence in Monte Carlo Localization.” Applied Soft Computing 50: 260–279.
- Choobineh, F. F., A. Asef-Vaziri, and X. Huang. 2012. “Fleet Sizing of Automated Guided Vehicles: A Linear Programming Approach Based on Closed Queuing Networks.” International Journal of Production Research 50 (12): 3222–3235.
- Çil, Z. A., Z. Li, S. Mete, and E. Özceylan. 2020. “Mathematical Model and Bee Algorithms for Mixed-Model Assembly Line Balancing Problem with Physical Human–Robot Collaboration.” Applied Soft Computing 93: 106394.
- Cimino, C., E. Negri, and L. Fumagalli. 2019. “Review of Digital Twin Applications in Manufacturing.” Computers in Industry 113: 103130.
- Cohen, Y., M. Faccio, F. Pilati, and X. Yao. 2019a. “Design and Management of Digital Manufacturing and Assembly Systems in the Industry 4.0 Era.” International Journal of Advanced Manufacturing Technolology 105 (9): 3565–3577.
- Cohen, Y., H. Naseraldin, A. Chaudhuri, and F. Pilati. 2019b. “Assembly Systems in Industry 4.0 Era: A Road Map to Understand Assembly 4.0.” The International Journal of Advanced Manufacturing Technology 105 (9): 4037–4054.
- Colledani, M., D. Coupek, A. Verl, J. Aichele, and A. Yemane. 2018. “A Cyber-Physical System for Quality-Oriented Assembly of Automotive Electric Motors.” CIRP Journal of Manufacturing Science and Technology 20: 12–22.
- Cormier, G., and E. A. Gunn. 1992. “A Review of Warehouse Models.” European Journal of Operational Research 58 (1): 3–13.
- Culot, G., G. Nassimbeni, G. Orzes, and M. Sartor. 2020. “Behind the Definition of Industry 4.0: Analysis and Open Questions.” International Journal of Production Economics 226: 107617.
- Dalle Mura, M., G. Dini. 2019. “Designing Assembly Lines with Humans and Collaborative Robots: A Genetic Approach.” CIRP Annals 68 (1): 1–4.
- Dang, Q. V., C. T. Nguyen, and H. Rudová. 2019. “Scheduling of Mobile Robots for Transportation and Manufacturing Tasks.” Journal of Heuristics 25 (2): 175–213.
- Dang, Q. V., I. Nielsen, K. Steger-Jensen, and O. Madsen. 2014. “Scheduling a Single Mobile Robot for Part-Feeding Tasks of Production Lines.” Journal of Intelligent Manufacturing 25 (6): 1271–1287.
- Danielsson, O., M. Holm, and A. Syberfeldt. 2020. “Augmented Reality Smart Glasses in Industrial Assembly: Current Status and Future Challenges.” Journal of Industrial Information Integration 20: 100175.
- Das, P. K., and P. K. Jena. 2020. “Multi-Robot Path Planning Using Improved Particle Swarm Optimization Algorithm Through Novel Evolutionary Operators.” Applied Soft Computing 92: 106312.
- Da Silveira, G., D. Borenstein, and F. S. Fogliatto. 2001. “Mass Customization: Literature Review and Research Directions.” International Journal of Production Economics 72 (1): 1–13.
- DeCroix, G. A., and P. H. Zipkin. 2005. “Inventory Management for an Assembly System with Product or Component Returns.” Management Science 51 (8): 1250–1265.
- Delgado-López-Cózar, E., and Á Cabezas-Clavijo. 2013. “Ranking Journals: Could Google Scholar Metrics be an Alternative to Journal Citation Reports and Scimago Journal Rank?” Learned Publishing 26 (2): 101–114.
- Djuric, A. M., R. J. Urbanic, and J. L. Rickli. 2016. “A Framework for Collaborative Robot (CoBot) Integration in Advanced Manufacturing Systems.” SAE International Journal of Materials and Manufacturing 9 (2): 457–464.
- Dolgui, A., S. E. Hashemi-Petroodi, S. Kovalev, and M. Y. Kovalyov. 2021. “Profitability of a Multi-Model Manufacturing Line Versus Multiple Dedicated Lines.” International Journal of Production Economics 236: 108113.
- Dolgui, A., S. Kovalev, M. Kovalyov, S. Malyutin, and A. Soukhal. 2018. “Optimal Workforce Assignment to Operations of a Paced Assembly Line.” European Journal of Operational Research 264 (1): 200–211.
- Dolgui, A., and J.-M. Proth. 2010. Supply Chain Engineering: Useful Methods and Techniques. London: Springer.
- Downe-Wamboldt, B. 1992. “Content Analysis: Method, Applications, and Issues.” Health Care for Women International 13 (3): 313–321.
- Elhoseny, M., A. Tharwat, and A. E. Hassanien. 2018. “Bezier Curve Based Path Planning in a Dynamic Field Using Modified Genetic Algorithm.” Journal of Computational Science 25: 339–350.
- El Makrini, I., K. Merckaert, J. De Winter, D. Lefeber, and B. Vanderborght. 2019. “Task Allocation for Improved Ergonomics in Human-Robot Collaborative Assembly.” Interaction Studies 20 (1): 102–133.
- Enomoto, A., N. Yamamoto, and T. Suzuki. 2013. “Automatic Estimation of the Ergonomics Parameters of Assembly Operations.” CIRP Annals 62 (1): 13–16.
- Faccio, M., E. Ferrari, M. Gamberi, and F. Pilati. 2019. “Human Factor Analyser for Work Measurement of Manual Manufacturing and Assembly Processes.” The International Journal of Advanced Manufacturing Technology 103 (1–4): 861–877.
- Faccio, M., R. Minto, G. Rosati, and M. Bottin. 2020. “The Influence of the Product Characteristics on Human-Robot Collaboration: A Model for the Performance of Collaborative Robotic Assembly.” The International Journal of Advanced Manufacturing Technology 106 (5): 2317–2331.
- Fager, P., M. Calzavara, and F. Sgarbossa. 2020. “Modelling Time Efficiency of Cobot-Supported kit Preparation.” The International Journal of Advanced Manufacturing Technology 106 (5): 2227–2241.
- Fager, P., R. Hanson, L. Medbo, and M. I. Johansson. 2019. “Kit Preparation for Mixed Model Assembly–Efficiency Impact of the Picking Information System.” Computers & Industrial Engineering 129: 169–178.
- Falagas, M. E., V. D. Kouranos, R. Arencibia-Jorge, and D. E. Karageorgopoulos. 2008. “Comparison of SCImago Journal Rank Indicator with Journal Impact Factor.” The FASEB Journal 22 (8): 2623–2628.
- Fang, W., and Z. An. 2020. “A Scalable Wearable AR System for Manual Order Picking Based on Warehouse Floor-Related Navigation.” The International Journal of Advanced Manufacturing Technology 109 (7): 2023–2037.
- Fantoni, G., S. Q. Al-Zubaidi, E. Coli, and D. Mazzei. 2020. “Automating the Process of Method-Time-Measurement.” International Journal of Productivity and Performance Management 70 (4): 958–982.
- Filotheou, A., E. Tsardoulias, A. Dimitriou, A. Symeonidis, and L. Petrou. 2020. “Pose Selection and Feedback Methods in Tandem Combinations of Particle Filters with Scan-Matching for 2D Mobile Robot Localisation.” Journal of Intelligent & Robotic Systems 100 (3): 925–944.
- Fragapane, G., R. de Koster, F. Sgarbossa, and J. O. Strandhagen. 2021. “Planning and Control of Autonomous Mobile Robots for Intralogistics: Literature Review and Research Agenda.” European Journal of Operational Research 294 (2): 405–426.
- Fragapane, G., D. Ivanov, M. Peron, F. Sgarbossa, and J. O. Strandhagen. 2020. “Increasing Flexibility and Productivity in Industry 4.0 Production Networks with Autonomous Mobile Robots and Smart Intralogistics.” Annals of Operations Research, 1–19.doi:https://doi.org/10.1007/s10479-020-03526-7.
- Galambos, P., Á Csapó, P. Zentay, I. M. Fülöp, T. Haidegger, P. Baranyi, and I. J. Rudas. 2015. “Design, Programming and Orchestration of Heterogeneous Manufacturing Systems Through VR-Powered Remote Collaboration.” Robotics and Computer-Integrated Manufacturing 33: 68–77.
- Gao, Y., J. Liu, M. Q. Hu, H. Xu, K. P. Li, and H. Hu. 2019. “A New Path Evaluation Method for Path Planning With Localizability.” IEEE Access 7: 162583–162597.
- Gao, W., X. D. Shao, and H. L. Liu. 2016. “Enhancing Fidelity of Virtual Assembly by Considering Human Factors.” The International Journal of Advanced Manufacturing Technology 83 (5–8): 873–886.
- Gebser, M., P. Obermeier, T. Schaub, M. Ratsch-Heitmann, and M. Runge. 2018. “Routing Driverless Transport Vehicles in car Assembly with Answer set Programming.” Theory and Practice of Logic Programming 18 (3–4): 520–534.
- Gharehgozli, A., and N. Zaerpour. 2020. “Robot Scheduling for Pod Retrieval in a Robotic Mobile Fulfillment System.” Transportation Research Part E: Logistics and Transportation Review 142: 102087.
- Groß, R., and M. Dorigo. 2009. “Towards Group Transport by Swarms of Robots.” International Journal of Bio-Inspired Computation 1 (1–2): 1–13.
- Gualtieri, L., I. Palomba, F. A. Merati, E. Rauch, and R. Vidoni. 2020. “Design of Human-Centered Collaborative Assembly Workstations for the Improvement of Operators’ Physical Ergonomics and Production Efficiency: A Case Study.” Sustainability 12 (9): 3606.
- Guo, D., R. Y. Zhong, P. Lin, Z. Lyu, Y. Rong, and G. Q. Huang. 2020b. “Digital Twin-Enabled Graduation Intelligent Manufacturing System for Fixed-Position Assembly Islands.” Robotics and Computer-Integrated Manufacturing 63: 101917.
- Guo, D., R. Y. Zhong, S. Ling, Y. Rong, and G. Q. Huang. 2020a. “A Roadmap for Assembly 4.0: Self-Configuration of Fixed-Position Assembly Islands Under Graduation Intelligent Manufacturing System.” International Journal of Production Research 58 (15): 4631–4646.
- Halawa, F., H. Dauod, I. G. Lee, Y. Li, S. W. Yoon, and S. H. Chung. 2020. “Introduction of a Real Time Location System to Enhance the Warehouse Safety and Operational Efficiency.” International Journal of Production Economics 224: 107541.
- Hari, S. K. K., A. Nayak, and S. Rathinam. 2020. “An Approximation Algorithm for a Task Allocation, Sequencing and Scheduling Problem Involving a Human-Robot Team.” IEEE Robotics and Automation Letters 5 (2): 2146–2153.
- Hashemi-Petroodi, S. E., A. Dolgui, S. Kovalev, M. Kovalyov, and S. Thevenin. 2020a. “Workforce Reconfiguration Strategies in Manufacturing Systems: A State of the art.” International Journal of Production Research, doi:https://doi.org/10.1080/00207543.2020.1823028.
- Hashemi-Petroodi, S. E., S. Thevenin, S. Kovalev, and A. Dolgui. 2020b. “Operations Management Issues in Design and Control of Hybrid Human-Robot Collaborative Manufacturing Systems: A Survey.” Annual Reviews in Control 49: 264–276.
- Havard, V., B. Jeanne, M. Lacomblez, and D. Baudry. 2019. “Digital Twin and Virtual Reality: A Co-Simulation Environment for Design and Assessment of Industrial Workstations.” Production & Manufacturing Research 7 (1): 472–489.
- Hietanen, A., R. Pieters, M. Lanz, J. Latokartano, and J. K. Kämäräinen. 2020. “AR-based Interaction for Human-Robot Collaborative Manufacturing.” Robotics and Computer-Integrated Manufacturing 63: 101891.
- Hoedt, S., A. Claeys, H. Van Landeghem, and J. Cottyn. 2017. “The Evaluation of an Elementary Virtual Training System for Manual Assembly.” International Journal of Production Research 55 (24): 7496–7508.
- Hosseini, S., and D. Ivanov. 2020. “Bayesian Networks for Supply Chain Risk, Resilience and Ripple Effect Analysis: A Literature Review.” Expert Systems with Applications 161: 113649.
- Hosseini, S., D. Ivanov, and A. Dolgui. 2019. “Review of Quantitative Methods for Supply Chain Resilience Analysis.” Transportation Research Part E: Logistics and Transportation Review 125: 285–307.
- Hu, S. J., J. Ko, L. Weyand, H. A. ElMaraghy, T. K. Lien, Y. Koren, H. Bley, G. Chryssolouris, N. Nasr, and M. Shpitalni. 2011. “Assembly System Design and Operations for Product Variety.” CIRP Annals 60 (2): 715–733.
- Hu, S. J., X. Zhu, H. Wang, and Y. Koren. 2008. “Product Variety and Manufacturing Complexity in Assembly Systems and Supply Chains.” CIRP Annals 57 (1): 45–48.
- Huang, G. Q., Y. F. Zhang, X. Chen, and S. T. Newman. 2008. “RFID-Enabled Real-Time Wireless Manufacturing for Adaptive Assembly Planning and Control.” Journal of Intelligent Manufacturing 19 (6): 701–713.
- Huang, Z., J. Zhu, L. Yang, B. Xue, J. Wu, and Z. Zhao. 2015. “Accurate 3-D Position and Orientation Method for Indoor Mobile Robot Navigation Based on Photoelectric Scanning.” IEEE Transactions on Instrumentation and Measurement 64 (9): 2518–2529.
- Huo, J., F. T. Chan, C. K. Lee, J. O. Strandhagen, and B. Niu. 2020a. “Smart Control of the Assembly Process with a Fuzzy Control System in the Context of Industry 4.0.” Advanced Engineering Informatics 43: 101031.
- Huo, J., J. Zhang, and F. T. Chan. 2020b. “A Fuzzy Control System for Assembly Line Balancing with a Three-State Degradation Process in the era of Industry 4.0.” International Journal of Production Research 58 (23): 7112–7129.
- Indri, M., L. Lachello, I. Lazzero, F. Sibona, and S. Trapani. 2019. “Smart Sensors Applications for a new Paradigm of a Production Line.” Sensors 19 (3): 650.
- Jensen-Nau, K. R., T. Hermans, and K. K. Leang. 2020. “Near-Optimal Area-Coverage Path Planning of Energy-Constrained Aerial Robots With Application in Autonomous Environmental Monitoring.” IEEE Transactions on Automation Science and Engineering 18 (3): 1453–1468.
- Jiang, Y., X. Huang, S. Li, and Z. Deng. 2019. “A Coordination Modelling Approach for Assembly of Multi-Constrained Objects Based on Measured Skin Model.” Assembly Automation 39 (2): 380–391.
- Jiang, M., K. H. Leung, Z. Lyu, and G. Q. Huang. 2020. “Picking-Replenishment Synchronization for Robotic Forward-Reserve Warehouses.” Transportation Research Part E: Logistics and Transportation Review 144: 102138.
- Kartal, H., A. Oztekin, A. Gunasekaran, and F. Cebi. 2016. “An Integrated Decision Analytic Framework of Machine Learning with Multi-Criteria Decision Making for Multi-Attribute Inventory Classification.” Computers & Industrial Engineering 101: 599–613.
- Keung, K. L., C. K. Lee, P. Ji, and K. K. Ng. 2020. “Cloud-Based Cyber-Physical Robotic Mobile Fulfillment Systems: A Case Study of Collision Avoidance.” IEEE Access 8: 89318–89336.
- Kim, S., M. A. Nussbaum, and J. L. Gabbard. 2019. “Influences of Augmented Reality Head-Worn Display Type and User Interface Design on Performance and Usability in Simulated Warehouse Order Picking.” Applied Ergonomics 74: 186–193.
- Kirazli, A., and R. Hormann. 2015. “A Conceptual Approach for Identifying Industrie 4.0 Application Scenarios.” In IIE Annual Conference. Proceedings, 862–871. Institute of Industrial and Systems Engineers (IISE). https://www.proquest.com/scholarly-journals/conceptual-approach-identifying-industrie-4-0/docview/1791989039/se-2?accountid=12870.
- Kolbeinsson, A., E. Lagerstedt, and J. Lindblom. 2019. “Foundation for a Classification of Collaboration Levels for Human-Robot Cooperation in Manufacturing.” Production & Manufacturing Research 7 (1): 448–471.
- Koul, S., and T. K. Horiuchi. 2019. “Waypoint Path Planning With Synaptic-Dependent Spike Latency.” IEEE Transactions on Circuits and Systems I: Regular Papers 66 (4): 1544–1557.
- Kousi, N., S. Koukas, G. Michalos, and S. Makris. 2019. “Scheduling of Smart Intra–Factory Material Supply Operations Using Mobile Robots.” International Journal of Production Research 57 (3): 801–814.
- Krippendorff, K. 2004. Content Analysis: An Introduction to Its Methodology. Thousand Oaks, CA: Sage.
- Krishnamurthy, R., and J. Cecil. 2018. “A Next-Generation IoT-Based Collaborative Framework for Electronics Assembly.” The International Journal of Advanced Manufacturing Technology 96 (1–4): 39–52.
- Krüger, J., T. K. Lien, and A. Verl. 2009. “Cooperation of Human and Machines in Assembly Lines.” CIRP Annals 58 (2): 628–646.
- Kucukkoc, I., and D. Z. Zhang. 2017. “Balancing of Mixed-Model Parallel U-Shaped Assembly Lines Considering Model Sequences.” International Journal of Production Research 55 (20): 5958–5975.
- Kucukoglu, I., H. Atici-Ulusu, T. Gunduz, and O. Tokcalar. 2018. “Application of the Artificial Neural Network Method to Detect Defective Assembling Processes by Using a Wearable Technology.” Journal of Manufacturing Systems 49: 163–171.
- Kumar, R., L. Ganapathy, R. Gokhale, and M. K. Tiwari. 2020. “Quantitative Approaches for the Integration of Production and Distribution Planning in the Supply Chain: A Systematic Literature Review.” International Journal of Production Research 58 (11): 3527–3553.
- Lasi, H., P. Fettke, H. G. Kemper, T. Feld, and M. Hoffmann. 2014. “Industry 4.0.” Business & Information Systems Engineering 6 (4): 239–242.
- Lee, C. K. M., Y. Lv, K. K. H. Ng, W. Ho, and K. L. Choy. 2018. “Design and Application of Internet of Things-Based Warehouse Management System for Smart Logistics.” International Journal of Production Research 56 (8): 2753–2768.
- Lei, P., L. Zheng, L. Wang, Y. Wang, C. Li, and X. Li. 2017. “MTConnect Compliant Monitoring for Finishing Assembly Interfaces of Large-Scale Components: A Vertical Tail Section Application.” Journal of Manufacturing Systems 45: 121–134.
- Li, L., Y. H. Liu, K. Wang, and M. Fang. 2014. “Estimating Position of Mobile Robots from Omnidirectional Vision Using an Adaptive Algorithm.” IEEE Transactions on Cybernetics 45 (8): 1633–1646.
- Li, L., K. Ota, and M. Dong. 2018. “Deep Learning for Smart Industry: Efficient Manufacture Inspection System with Fog Computing.” IEEE Transactions on Industrial Informatics 14 (10): 4665–4673.
- Lindenmeyer, C. 2001. How to Design and Conduct a Computer-Integrated Time Study with Active Element Performance Rating (CITS APR). Copyright, C-FOUR July 8, 2001. Page 1 of 16.
- Liu, Y., S. Li, and J. Wang. 2015a. “Assembly Auxiliary System for Narrow Cabins of Spacecraft.” Chinese Journal of Mechanical Engineering 28 (5): 1080–1088.
- Liu, Y., S. Li, J. Wang, H. Zeng, and J. Lu. 2015b. “A Computer Vision-Based Assistant System for the Assembly of Narrow Cabin Products.” The International Journal of Advanced Manufacturing Technology 76 (1–4): 281–293.
- Liu, M., J. Ma, L. Lin, M. Ge, Q. Wang, and C. Liu. 2017. “Intelligent Assembly System for Mechanical Products and key Technology Based on Internet of Things.” Journal of Intelligent Manufacturing 28 (2): 271–299.
- Lo, S. Y., S. Zhang, and P. Stone. 2020. “The PETLON Algorithm to Plan Efficiently for Task-Level-Optimal Navigation.” Journal of Artificial Intelligence Research 69: 471–500.
- Lolli, F., E. Balugani, A. Ishizaka, R. Gamberini, B. Rimini, and A. Regattieri. 2019. “Machine Learning for Multi-Criteria Inventory Classification Applied to Intermittent Demand.” Production Planning & Control 30 (1): 76–89.
- Lolli, F., A. Ishizaka, R. Gamberini, E. Balugani, and B. Rimini. 2017. “Decision Trees for Supervised Multi-Criteria Inventory Classification.” Procedia Manufacturing 11: 1871–1881.
- Luo, J., Y. Wan, W. Wu, and Z. Li. 2019. “Optimal Petri-Net Controller for Avoiding Collisions in a Class of Automated Guided Vehicle Systems.” IEEE Transactions on Intelligent Transportation Systems 21 (11): 4526–4537.
- Lyu, Z., P. Lin, D. Guo, and G. Q. Huang. 2020. “Towards Zero-Warehousing Smart Manufacturing from Zero-Inventory Just-In-Time Production.” Robotics and Computer-Integrated Manufacturing 64: 101932.
- Lyu, X., Y. Song, C. He, Q. Lei, and W. Guo. 2019. “Approach to Integrated Scheduling Problems Considering Optimal Number of Automated Guided Vehicles and Conflict-Free Routing in Flexible Manufacturing Systems.” IEEE Access 7: 74909–74924.
- Malik, A. A., and A. Brem. 2020. Digital Twins for Collaborative Robots: A Case Study in Human-Robot Interaction.” Robotics and Computer-Integrated Manufacturing 68: 102092.
- Mantegh, I., M. R. Jenkin, and A. A. Goldenberg. 2010. “Path Planning for Autonomous Mobile Robots Using the Boundary Integral Equation Method.” Journal of Intelligent & Robotic Systems 59 (2): 191–220.
- Marques, B., J. Alves, M. Neves, I. Justo, A. Santos, R. Rainho, R. Maio, et al. 2020. “Interaction with Virtual Content Using Augmented Reality: A User Study in Assembly Procedures.” Proceedings of the ACM on Human-Computer Interaction 4 (ISS): 1–17.
- Mateus, J. C., D. Claeys, V. Limère, J. Cottyn, and E. H. Aghezzaf. 2019. “A Structured Methodology for the Design of a Human-Robot Collaborative Assembly Workplace.” The International Journal of Advanced Manufacturing Technology 102 (5–8): 2663–2681.
- Mei, Y., Y. H. Lu, Y. C. Hu, and C. G. Lee. 2005, July. “A Case Study of Mobile Robot's Energy Consumption and Conservation Techniques.” In ICAR’05. Proceedings, 12th International Conference on Advanced Robotics, 2005. Seattle, WA, USA, 492–497. IEEE. doi:https://doi.org/10.1109/ICAR.2005.1507454.
- Michalos, G., A. Karvouniari, N. Dimitropoulos, T. Togias, and S. Makris. 2018a. “Workplace Analysis and Design Using Virtual Reality Techniques.” CIRP Annals 67 (1): 141–144.
- Michalos, G., N. Kousi, P. Karagiannis, C. Gkournelos, K. Dimoulas, S. Koukas, K. Mparis, A. Papavasileiou, and S. Makris. 2018b. “Seamless Human Robot Collaborative Assembly–An Automotive Case Study.” Mechatronics 55: 194–211.
- Miller, J., M. Hoover, and E. Winer. 2020. “Mitigation of the Microsoft HoloLens’ Hardware Limitations for a Controlled Product Assembly Process.” The International Journal of Advanced Manufacturing Technology 109 (5): 1741–1754.
- Mohammed, A., B. Schmidt, and L. Wang. 2017. “Active Collision Avoidance for Human–Robot Collaboration Driven by Vision Sensors.” International Journal of Computer Integrated Manufacturing 30 (9): 970–980.
- Moussa, M., and H. ElMaraghy. 2019. “Master Assembly Network for Alternative Assembly Sequences.” Journal of Manufacturing Systems 51: 17–28.
- Moysis, L., E. Petavratzis, C. Volos, H. Nistazakis, and I. Stouboulos. 2020. “A Chaotic Path Planning Generator Based on Logistic map and Modulo Tactics.” Robotics and Autonomous Systems 124: 103377.
- Mukund Nilakantan, J., and S. G. Ponnambalam. 2016. “Robotic U-Shaped Assembly Line Balancing Using Particle Swarm Optimization.” Engineering Optimization 48 (2): 231–252.
- Muthukumaran, S., and R. Sivaramakrishnan. 2019. “Optimal Path Planning for an Autonomous Mobile Robot Using Dragonfly Algorithm.” International Journal of Simulation Modelling 18 (3): 397–407.
- Negri, E., S. Berardi, L. Fumagalli, and M. Macchi. 2020. “MES-integrated Digital Twin Frameworks.” Journal of Manufacturing Systems 56: 58–71.
- Nielsen, I., Q. V. Dang, G. Bocewicz, and Z. Banaszak. 2017. “A Methodology for Implementation of Mobile Robot in Adaptive Manufacturing Environments.” Journal of Intelligent Manufacturing 28 (5): 1171–1188.
- Nikolakis, N., K. Alexopoulos, E. Xanthakis, and G. Chryssolouris. 2019a. “The Digital Twin Implementation for Linking the Virtual Representation of Human-Based Production Tasks to Their Physical Counterpart in the Factory-Floor.” International Journal of Computer Integrated Manufacturing 32 (1): 1–12.
- Nikolakis, N., V. Maratos, and S. Makris. 2019b. “A Cyber Physical System (CPS) Approach for Safe Human-Robot Collaboration in a Shared Workplace.” Robotics and Computer-Integrated Manufacturing 56: 233–243.
- Nishi, T., and Y. Tanaka. 2012. “Petri Net Decomposition Approach for Dispatching and Conflict-Free Routing of Bidirectional Automated Guided Vehicle Systems.” IEEE Transactions on Systems, Man, and Cybernetics-Part A: Systems and Humans 42 (5): 1230–1243.
- Nuzzi, C., S. Pasinetti, R. Pagani, S. Ghidini, M. Beschi, G. Coffetti, and G. Sansoni. 2020. MEGURU: A Gesture-Based Robot Program Builder for Meta-Collaborative Workstations.” Robotics and Computer-Integrated Manufacturing 68: 102085.
- Ohnishi, N., and A. Imiya. 2013. “Appearance-Based Navigation and Homing for Autonomous Mobile Robot.” Image and Vision Computing 31 (6-7): 511–532.
- Orru', P F, S Arena, C Loi, V Giussani, and M Natalini. 2019. "Production line optimization in an Engineering to Order Business (petrochemical industry) using Value-stream mapping method." XXIV Summer School "Francesco Turco 1: 300–306.
- Otto, A., and X. Li. 2020. “Product Sequencing in Multiple-Piece-Flow Assembly Lines.” Omega 91: 102055.
- Oyekan, J., A. Fischer, W. Hutabarat, C. Turner, and A. Tiwari. 2019. “Utilising Low Cost RGB-D Cameras to Track the Real Time Progress of a Manual Assembly Sequence.” Assembly Automation 40 (6): 925–939.
- Oztemel, E., and S. Gursev. 2020. “Literature Review of Industry 4.0 and Related Technologies.” Journal of Intelligent Manufacturing 31 (1): 127–182.
- Panda, M. R., P. Das, and S. Pradhan. 2017. “Hybridization of IWO and IPSO for Mobile Robots Navigation in a Dynamic Environment.” Journal of King Saud University-Computer and Information Sciences 32 (9): 1020–1033.
- Papakostas, N., G. Pintzos, C. Giannoulis, and G. Chryssolouris. 2016. “An Agent-Based Collaborative Platform for the Design of Assembly Lines.” International Journal of Computer Integrated Manufacturing 29 (4): 374–385.
- Peron, M., F. Sgarbossa, and J. O. Strandhagen. 2020. “Decision Support Model for Implementing Assistive Technologies in Assembly Activities: A Case Study.” International Journal of Production Research, 1–27. doi:https://doi.org/10.1080/00207543.2020.1856441.
- Peruzzini, M., F. Grandi, S. Cavallaro, and M. Pellicciari. 2020a. “Using Virtual Manufacturing to Design Human-Centric Factories: An Industrial Case.” The International Journal of Advanced Manufacturing Technology 115: 873–887.
- Peruzzini, M., F. Grandi, and M. Pellicciari. 2020b. “Exploring the Potential of Operator 4.0 Interface and Monitoring.” Computers & Industrial Engineering 139: 105600.
- Petrović, M., Z. Miljković, and A. Jokić. 2019. “A Novel Methodology for Optimal Single Mobile Robot Scheduling Using Whale Optimization Algorithm.” Applied Soft Computing 81: 105520.
- Petrović, M., N. Vuković, M. Mitić, and Z. Miljković. 2016. “Integration of Process Planning and Scheduling Using Chaotic Particle Swarm Optimization Algorithm.” Expert Systems with Applications 64: 569–588.
- Piller, F. T. 2005. “Mass Customization: Reflections on the State of the Concept.” International Journal of Flexible Manufacturing Systems 16 (4): 313–334.
- Piller, F. T. 2007. “Observations on the Present and Future of Mass Customization.” International Journal of Flexible Manufacturing Systems 19 (4): 630–636.
- Plantard, P., H. P. Shum, A. S. Le Pierres, and F. Multon. 2017. “Validation of an Ergonomic Assessment Method Using Kinect Data in Real Workplace Conditions.” Applied Ergonomics 65: 562–569.
- Pollard, D., S. Chuo, and B. Lee. 2008. “Strategies for Mass Customization.” Journal of Business & Economics Research (JBER) 6 (7): 77–86. doi:https://doi.org/10.19030/jber.v6i7.2447.
- Posadas, J. L., J. L. Poza, J. E. Simó, G. Benet, and F. Blanes. 2008. “Agent-based Distributed Architecture for Mobile Robot Control.” Engineering Applications of Artificial Intelligence 21 (6): 805–823.
- Prati, E., M. Peruzzini, M. Pellicciari, and R. Raffaeli. 020. “How to Include User EXperience in the Design of Human-Robot Interaction.” Robotics and Computer-Integrated Manufacturing 68: 102072.
- Qian, C., Y. Zhang, C. Jiang, S. Pan, and Y. Rong. 2020. “A Real-Time Data-Driven Collaborative Mechanism in Fixed-Position Assembly Systems for Smart Manufacturing.” Robotics and Computer-Integrated Manufacturing 61: 101841.
- Qu, H., S. X. Yang, A. R. Willms, and Z. Yi. 2009. “Real-Time Robot Path Planning Based on a Modified Pulse-Coupled Neural Network Model.” IEEE Transactions on Neural Networks 20 (11): 1724–1739.
- Rabbani, M., M. Moghaddam, and N. Manavizadeh. 2012. “Balancing of Mixed-Model two-Sided Assembly Lines with Multiple U-Shaped Layout.” The International Journal of Advanced Manufacturing Technology 59 (9–12): 1191–1210.
- Radder, L., and L. Louw. 1999. “Mass Customization and Mass Production.” The TQM Magazine 11 (1): 35–40.
- Rahman, H. F., M. N. Janardhanan, and P. Nielsen. 2020. “An Integrated Approach for Line Balancing and AGV Scheduling Towards Smart Assembly Systems.” Assembly Automation 40 (2): 219–234.
- Rekiek, B., A. Dolgui, A. Delchambre, and A. Bratcu. 2002. “State of art of Optimization Methods for Assembly Line Design.” Annual Reviews in Control 26 (2): 163–174.
- Riva, G. 2002. “Virtual Reality for Health Care: The Status of Research.” Cyberpsychology & Behavior 5 (3): 219–225.
- Roda, I., S. Arena, M. Macchi, and P. F. Orru'. 2019. “Total Cost of Ownership Driven Methodology for Predictive Maintenance Implementation in Industrial Plants..” IFIP International Conference on Advances in Production Management Systems 566: 315–322.
- Roodbergen, K. J., and I. F. Vis. 2006. “A Model for Warehouse Layout.” IIE Transactions 38 (10): 799–811.
- Runji, J. M., and C. Y. Lin. 2020. “Switchable Glass Enabled Contextualization for a Cyber-Physical Safe and Interactive Spatial Augmented Reality PCBA Manufacturing Inspection System.” Sensors 20 (15): 4286.
- Ruppert, T., and J. Abonyi. 2020. “Integration of Real-Time Locating Systems into Digital Twins.” Journal of Industrial Information Integration 20: 100174.
- Saeed, R. A., D. R. Recupero, and P. Remagnino. 2020. “A Boundary Node Method for Path Planning of Mobile Robots.” Robotics and Autonomous Systems 123: 103320.
- Sali, M., and E. Sahin. 2016. “Line Feeding Optimization for Just in Time Assembly Lines: An Application to the Automotive Industry.” International Journal of Production Economics 174: 54–67.
- Sassi, P., P. Tripicchio, and C. A. Avizzano. 2019. “A Smart Monitoring System for Automatic Welding Defect Detection.” IEEE Transactions on Industrial Electronics 66 (12): 9641–9650.
- Schmid, N. A., and V. Limère. 2019. “A Classification of Tactical Assembly Line Feeding Problems.” International Journal of Production Research 57 (24): 7586–7609.
- Schwab, K. 2016. The Fourth Industrial Revolution. New York: Crown Publishing Group.
- SCIMAGO. 2020. Scimago Journal and Country Rank. Accessed 25 January 2021. https://www.scimagojr.com/.
- Seuring, S., and S. Gold. 2012. “Conducting Content-Analysis Based Literature Reviews in Supply Chain Management.” Supply Chain Management: An International Journal 17 (5): 544–555. doi:https://doi.org/10.1108/13598541211258609.
- Shrouf, F., J. Ordieres, and G. Miragliotta. 2014, December. “Smart Factories in Industry 4.0: A Review of the Concept and of Energy Management Approached in Production Based on the Internet of Things Paradigm.” In 2014 IEEE International Conference on Industrial Engineering and Engineering Management. Selangor, Malaysia, 697–701. IEEE. doi:https://doi.org/10.1109/IEEM.2014.7058728.
- Song, B., Z. Wang, and L. Sheng. 2016. “A new Genetic Algorithm Approach to Smooth Path Planning for Mobile Robots.” Assembly Automation 36 (2): 138–145.
- Stadnicka, D., and D. Antonelli. 2019. “Human-robot Collaborative Work Cell Implementation Through Lean Thinking.” International Journal of Computer Integrated Manufacturing 32 (6): 580–595.
- Tan, Q., Y. Tong, S. Wu, and D. Li. 2019. “Modeling, Planning, and Scheduling of Shop-Floor Assembly Process with Dynamic Cyber-Physical Interactions: A Case Study for CPS-Based Smart Industrial Robot Production.” The International Journal of Advanced Manufacturing Technology 105 (9): 3979–3989.
- Tao, W., M. C. Leu, and Z. Yin. 2020. “Multi-modal Recognition of Worker Activity for Human-Centered Intelligent Manufacturing.” Engineering Applications of Artificial Intelligence 95: 103868.
- Tarallo, A., R. Mozzillo, G. Di Gironimo, and R. De Amicis. 2018. “A Cyber-Physical System for Production Monitoring of Manual Manufacturing Processes.” International Journal on Interactive Design and Manufacturing (IJIDeM 12 (4): 1235–1241.
- Tejesh, B. S. S., and S. J. A. E. J. Neeraja. 2018. “Warehouse Inventory Management System Using IoT and Open Source Framework.” Alexandria Engineering Journal 57 (4): 3817–3823.
- Thames, L., and D. Schaefer. 2016. “Software-defined Cloud Manufacturing for Industry 4.0.” Procedia Cirp 52: 12–17.
- Tranfield, David, David Denyer, and Palminder Smart. 2003. “Towards a Methodology for Developing Evidence-Informed Management Knowledge by Means of Systematic Review.” British Journal of Management 14: 207–222.
- Unhelkar, V. V., S. Dörr, A. Bubeck, P. A. Lasota, J. Perez, H. C. Siu, J. C. Boerkoel, et al. 2018a. “Mobile Robots for Moving-Floor Assembly Lines: Design, Evaluation, and Deployment.” IEEE Robotics & Automation Magazine 25 (2): 72–81.
- Unhelkar, V. V., P. A. Lasota, Q. Tyroller, R. D. Buhai, L. Marceau, B. Deml, and J. A. Shah. 2018b. “Human-Aware Robotic Assistant for Collaborative Assembly: Integrating Human Motion Prediction with Planning in Time.” IEEE Robotics and Automation Letters 3 (3): 2394–2401.
- Vanneste, P., Y. Huang, J. Y. Park, F. Cornillie, B. Decloedt, and W. Van den Noortgate. 2020. “Cognitive Support for Assembly Operations by Means of Augmented Reality: An Exploratory Study.” International Journal of Human-Computer Studies 143: 102480.
- Wagner, R., B. Haefner, M. Biehler, and G. Lanza. 2020. “Digital DNA in Quality Control Cycles of High-Precision Products.” CIRP Annals 69: 373–379.
- Walker, J. H., S. M. Garrett, and M. S. Wilson. 2006. “The Balance Between Initial Training and Lifelong Adaptation in Evolving Robot Controllers.” IEEE Transactions on Systems, Man, and Cybernetics, Part B (Cybernetics 36 (2): 423–432.
- Wan, J., S. Tang, Q. Hua, D. Li, C. Liu, and J. Lloret. 2017. “Context-aware Cloud Robotics for Material Handling in Cognitive Industrial Internet of Things.” IEEE Internet of Things Journal 5 (4): 2272–2281.
- Wang, X. V., Z. Kemény, J. Váncza, and L. Wang. 2017. “Human–Robot Collaborative Assembly in Cyber-Physical Production: Classification Framework and Implementation.” CIRP Annals 66 (1): 5–8.
- Wang, K., D. Liu, Z. Liu, Q. Wang, and J. Tan. 2020a. “An Assembly Precision Analysis Method Based on a General Part Digital Twin Model.” Robotics and Computer-Integrated Manufacturing 68: 102089.
- Wang, K. J., D. A. Rizqi, and H. P. Nguyen. 2020b. “Skill Transfer Support Model Based on Deep Learning.” Journal of Intelligent Manufacturing 32: 1129–1146.
- Wänström, C., and L. Medbo. 2009. “The Impact of Materials Feeding Design on Assembly Process Performance.” Journal of Manufacturing Technology Management 20: 30–51.
- Weckenborg, C., K. Kieckhäfer, C. Müller, M. Grunewald, and T. S. Spengler. 2020. “Balancing of Assembly Lines with Collaborative Robots.” Business Research 13 (1): 93–132.
- Westerfield, G., A. Mitrovic, and M. Billinghurst. 2015. “Intelligent Augmented Reality Training for Motherboard Assembly.” International Journal of Artificial Intelligence in Education 25 (1): 157–172.
- Winkelhaus, S., and E. H. Grosse. 2020. “Logistics 4.0: A Systematic Review Towards a New Logistics System.” International Journal of Production Research 58 (1): 18–43.
- Wu, S. Q., B. Shen, Y. Z. Tang, J. H. Wang, and D. T. Zheng. 2018. “Ergonomic Layout Optimization of a Smart Assembly Workbench.” Assembly Automation 38: 314–322.
- Wu, S., Z. Wang, B. Shen, J. H. Wang, and L. Dongdong. 2020. “Human-computer Interaction Based on Machine Vision of a Smart Assembly Workbench.” Assembly Automation 40: 475–482.
- Xia, F., L. T. Yang, L. Wang, and A. Vinel. 2012. “Internet of Things.” International Journal of Communication Systems 25 (9): 1101.
- Xiao, H., Y. Duan, Z. Zhang, and M. Li. 2018. “Detection and Estimation of Mental Fatigue in Manual Assembly Process of Complex Products.” Assembly Automation 38: 239–247.
- Xu, P., H. Mei, L. Ren, and W. Chen. 2016. “ViDX: Visual Diagnostics of Assembly Line Performance in Smart Factories.” IEEE Transactions on Visualization and Computer Graphics 23 (1): 291–300.
- Xu, S., F. Xiao, N. Si, L. Sun, W. Wu, and V. H. C. de Albuquerque. 2020. “GQM: Autonomous Goods Quantity Monitoring in IIoT Based on Battery-Free RFID.” Mechanical Systems and Signal Processing 136: 106411.
- Yao, B., Z. Zhou, L. Wang, W. Xu, J. Yan, and Q. Liu. 2018. “A Function Block Based Cyber-Physical Production System for Physical Human–Robot Interaction.” Journal of Manufacturing Systems 48: 12–23.
- Yelles-Chaouche, A. R., E. Gurevsky, N. Brahimi, and A. Dolgui. 2020. “Reconfigurable Manufacturing Systems from an Optimisation Perspective: A Focused Review of Literature.” International Journal of Production Research, 1–19. doi:https://doi.org/10.1080/00207543.2020.1813913.
- Yi, Y., Y. Yan, X. Liu, Z. Ni, J. Feng, and J. Liu. 2020. “Digital Twin-Based Smart Assembly Process Design and Application Framework for Complex Products and its Case Study.” Journal of Manufacturing Systems 58: 94–107.
- Yoshitake, H., R. Kamoshida, and Y. Nagashima. 2019. “New Automated Guided Vehicle System Using Real-Time Holonic Scheduling for Warehouse Picking.” IEEE Robotics and Automation Letters 4 (2): 1045–1052.
- Yu, Q., and K. Wang. 2013. “3D Vision Based Quality Inspection with Computational Intelligence.” Assembly Automation 33: 240–246.
- Yuan, M. L., S. K. Ong, and A. Y. C. Nee. 2008. “Augmented Reality for Assembly Guidance Using a Virtual Interactive Tool.” International Journal of Production Research 46 (7): 1745–1767.
- Zeng, C., J. Tang, and C. Yan. 2015. “Job-shop Cell-Scheduling Problem with Inter-Cell Moves and Automated Guided Vehicles.” Journal of Intelligent Manufacturing 26 (5): 845–859.
- Zhang, J., S. K. Ong, and A. Y. C. Nee. 2011. “RFID-assisted Assembly Guidance System in an Augmented Reality Environment.” International Journal of Production Research 49 (13): 3919–3938.
- Zhao, Z., M. Zhang, C. Yang, J. Fang, and G. Q. Huang. 2018. “Distributed and Collaborative Proactive Tandem Location Tracking of Vehicle Products for Warehouse Operations.” Computers and Industrial Engineering 125: 637–648.
- Zhong, Y. G., and B. Ai. 2017. “A Modified ant Colony Optimization Algorithm for Multi-Objective Assembly Line Balancing.” Soft Computing 21 (22): 6881–6894.
- Zhong, R. Y., X. Xu, E. Klotz, and S. T. Newman. 2017. “Intelligent Manufacturing in the Context of Industry 4.0: A Review.” Engineering 3 (5): 616–630.
- Zhou, L., J. Liu, X. Fan, D. Zhu, P. Wu, and N. Cao. 2019. “Design of V-Type Warehouse Layout and Picking Path Model Based on Internet of Things.” IEEE Access 7: 58419–58428.
- Zhou, B. H., and J. H. Xu. 2018. “An Adaptive Large Neighbourhood Search-Based Optimisation for Economic co-Scheduling of Mobile Robots.” European Journal of Industrial Engineering 12 (6): 832–854.
- Zhuang, C., J. Liu, and H. Xiong. 2018. “Digital Twin-Based Smart Production Management and Control Framework for the Complex Product Assembly Shop-Floor.” The International Journal of Advanced Manufacturing Technology 96 (1–4): 1149–1163.
- Židek, K., J. Piteľ, M. Adámek, P. Lazorík, and A. Hošovský. 2020. “Digital Twin of Experimental Smart Manufacturing Assembly System for Industry 4.0 Concept.” Sustainability 12 (9): 3658.
- Zipkin, P. 2001. “The Limits of Mass Customization.” MIT Sloan Management Review 42 (3): 81.
- Zou, Q., M. Cong, D. Liu, and Y. Du. 2019. “Robotic Path Planning Based on Episodic-Cognitive Map. International Journal of Control.” Automation and Systems 17 (5): 1304–1313.
- Zülch, M., and G. Zülch. 2017. “Production Logistics and Ergonomic Evaluation of U-Shaped Assembly Systems.” International Journal of Production Economics 190: 37–44.