
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
Travel time models for automated storage and retrieval systems (AS/RS) are used to define average travel times during storage/retrieval operations in an AS/RS. With an increasing depth of AS/RS racks, storage goods are stored in front of each other. This can lead to relocation operations of blocking goods causing higher travel times. This paper derives analytically and presents four travel time models for multi-deep AS/RS following four storage allocation strategies. Two models handle random strategies, one minimises the variance of storage channel fillings and the fourth maximises this variance. Evaluation and comparison of different models is followed by a discrete event simulation to verify these models. It is shown that the minimal variance strategy achieves the lowest relocation numbers and also the lowest total travel times, the random strategies perform between the minimal and maximal variance strategy.
1. Introduction
Automatic storage and retrieval systems (AS/RS) are used in warehousing extensively over the last decades. They offer a reliable system for storage as well as buffer in interaction with production lines. In comparison to single-deep AS/RS, multi-deep AS/RS can store more storage goods in the same space and achieve a higher storage density. Because storage goods are stored behind each other in multi-deep AS/RS, relocations can occur when a blocked storage good needs to be retrieved. This leads to an additional effort which can reduce the overall throughput of an AS/RS. While it is necessary to develop strategies to prevent relocations, e.g. through batching, it is also important to determine how many relocations will occur when different storage strategies are applied to a multi-deep AS/RS during the planning process of such AS/RS.
Therefore, travel time models are necessary to evaluate planned AS/RS layouts. Due to the further technical development of multi-deep and, in particular, triple- and quadruple-deep AS/RS, travel time models for these systems are necessary. Currently, system integrators are reliant on rather old guidelines such as the VDI 4480 for general travel time models, which does not contain relocations (Verein Deutscher Ingenieure (VDI) Citation2002). System integrators and other logistics specialists have to use simulations laboriously to estimate the throughput of new AS/RS, which could be simplified by the use of new and more accurate travel time models.
The AS/RS regarded in this paper consists of one aisle with one storage rack and one S/R machine. The storage rack is X storage channels long and Y storage channels high. Every storage channel has n storage locations behind each other. This paper presents four travel time models for a continuous rack, which are universally applied for AS/RS of all sizes. The average time for a single command storage or retrieval cycle and dual command cycles of the S/R machine can be determined with these travel time models. Furthermore, the relocation probability and quantity as well as the movement times in the storage channels itself can be calculated depending on the stock-filling level z, which describes the relative occupation of an AS/RS.
Travel time models were developed in the 1960s for single-deep AS/RS by Gudehus (Citation1972), Bozer and White (Citation1982, Citation1984) and double-deep AS/RS by Lippolt (Citation2003). All authors share the common idea, that a storage operation chooses randomly from all free storage channels and a retrieval operation picks a random storage good. They also assume that racks are continuous to determine the travel times of the S/R machine. Some travel time models for multi-deep AS/RS were developed in recent decades and are discussed in Section 2. However, state-of-the-art literature for travel time models of multi-deep AS/RS uses further assumptions for the determination of relocation probabilities and especially the relocation quantities and, therefore, the total travel times, such as batching of storage goods, no necessity for relocations at all or handling of relocations in the storage channels themselves.
The goal of this paper is to present travel time models for multi-deep AS/RS with four different storage assignment strategies and a random retrieval strategy. This paper avoids further assumptions and displays travel times and relocation quantities only depending on the properties of the S/R machine and the rack as well as the stock filling level z. The four storage assignment strategies covered are used during storage and relocation operations:
Random Storage Channel Strategy (RSCS) – Random choice of a storage channel out of all free storage channels. The storage location is the deepest storage location possible in the chosen storage channel. This strategy is widely used in the literature for single-deep AS/RS (Bozer and White Citation1982), double-deep AS/RS (Lippolt Citation2003) and multi-deep shuttle-based storage and retrieval systems (Eder Citation2020a). However, for multi-deep AS/RS, it was not possible to derive exact channel probabilities and, therefore, relocation quantities for the steady state of an AS/RS, yet
Random Storage Location Strategy (RSLS) – Random choice of a storage location out of all free storage locations. This strategy is widely unknown in the literature, but it prefers empty storage channels over more occupied storage channels for storage operations and for relocations as well
Minimal Variance Strategy – Choice of a storage channel that minimises the filling variance of all storage channels. This strategy is used by Lerher et al. (Citation2010) for double-deep AS/RS. Also Sari, Saygin, and Ghouali (Citation2005) use this strategy for multi-deep AS/RS, but only for stock filling levels with
. This paper extends the existing work for all stock filling levels
Maximal Variance Strategy – Choice of a storage channel that maximises the filling variance of all storage channels. This strategy leads to the maximal number of relocations and is, therefore, only useful as an upper limit and comparison for the other three strategies
The most critical components for travel time models for multi-deep AS/RS are the relocation quantities. To determine these relocations, it is necessary to know the channel probabilities – how likely is a randomly chosen channel empty, filled with one storage good, filled with two storage goods, etc. – depended on the stock filling level. For the first two strategies, the storage, retrieval and relocation operations are modelled with Markov chains out of which the channel probabilities can be extracted. The channel probabilities for the minimal and maximal variance strategy can be derived directly from their definition.
A discrete event simulation verifies the analytical models. The simulation model mimics one rack of a five-deep AS/RS with one S/R machine and then runs 250,000 storage and retrieval processes to compare the average travel times, relocation quantities and channel state probabilities of the simulation and the analytical models.
Section 2 deals with the state-of-the-art of travel time models for multi-deep AS/RS followed by the basics of travel time calculation in Section 3. Section 4 presents the RSCS; the other three storage assignment strategies are discussed in Sections 5–7. Section 8 compares the four analytically derived strategies with each other and a discrete event simulation. Finally, Section 9 closes this paper by providing recommendations and other important notes concerning the applicability of the developed models.
2. Literature review
This literature review not only focuses on the most basic AS/RS, as described in the introduction, but also includes different AS/RS variations such as vehicle AS/RS, flow-rack AS/RS, push-back AS/RS or conveyor-based AS/RS (Azadeh, De Koster, and Roy Citation2019). All these variations can consider multi-deep storage and – depending on the AS/RS design – the necessity of relocations. Hence, the methods to calculate relocation probabilities and quantities for one variation of AS/RS may be transferred to other AS/RS variations. Furthermore, besides the relevant paper about analytic travel time models, some simulation-based paper are also presented. However, the focus of this literature research is on analytic travel time models for multi-deep AS/RS.
The first travel time models were developed by Gudehus (Citation1972) and later Bozer and White (Citation1982, Citation1984) for single-deep AS/RS. As in this paper, they use an AS/RS with one rack, a random storage and retrieval strategy and a continuous pick face to determine the expected average travel time for a storage or retrieval operation in closed-form expressions. The next step was the extension of this basic model to double-deep AS/RS by Lippolt (Citation2003), who provided an exact relocation probability depending on the stock filling level z, assuming random storage assignment and retrieval strategies. Lippolt shows that the relocation probability and quantity can be expressed in closed-form expression only depending on the amount of stored goods compared to the total capacity of the AS/RS. Lerher et al. (Citation2010) also introduce a travel time model for double-deep AS/RS, but use implicitly a minimal variance storage assignment strategy. The same principle is applied to the travel time calculation of double-deep shuttle-based AS/RS (Lerher Citation2016).
Following the models for single- and double-deep AS/RS, travel time models for multi-deep AS/RS were developed. There are two categories of related literature available. The first category models, the multi-deep AS/RS with relatively simple assumptions, eliminate the relocation necessity or ensure a constant number of necessary relocations independently from the stock filling level. The most basic works available do not regard relocations (Verein Deutscher Ingenieure (VDI) Citation2002; D'Antonio and Chiabert Citation2019) or assume that these are not necessary at all due to the batching of storage goods (Manzini et al. Citation2016). The paper of Manzini et al. (Citation2016) shows that AS/RS variations can be compared. They use an AVS/RS that can be interpreted as several AS/RS with height one connected with a lift and, therefore, the basic mechanisms as relocations can be compared and travel time models can be transferred. Furthermore, several authors assume an AS/RS, which is completely filled and, therefore, whenever a storage good is blocked the maximal number of relocations is required. This way, the calculation of the number of relocations only depends on the location of the affected storage good in the storage channel (Federation Europeenne de la manutention (FEM) Citation2001; Xu et al. Citation2019). Starting with (de Koster, Le-Duc, and Yugang Citation2008), a new type of AS/RS was introduced that completes the necessary relocations within the rack itself. Therefore, this approach needs different methods to calculate the relocation probabilities, which are not useful for this paper. However, this assumption is widely used as in, e.g., Yu and de Koster (Citation2009) and Yang et al. (Citation2015, Citation2017).
All papers mentioned in the first category calculate the travel times independently from the stock filling level z, in contrast to the papers of the second category, which include the dependency from z. Sari, Saygin, and Ghouali (Citation2005) introduce an AS/RS where one S/R machine fills the racks and another S/R machine retrieves storage goods from the other side of the rack. Relocations are realised by a separate conveyor belt. Based on the stock filling level, they determine the relocation probability, however, Sari, Saygin, and Ghouali (Citation2005) also assume a minimal variance of storage channel fillings, which leads to a different relocation probability for double-deep AS/RS compared to the analytically derived results of Lippolt (Citation2003). Comparing simulations with analytical models, the same deviations appear as described for Lerher et al. (Citation2010) and Lerher (Citation2016). However, this approach has been used in the last decade by several authors, such as Latéfa and Sari (Citation2017). Eder (Citation2020a) determines the relocation probability for a shuttle-based storage and retrieval system depending on the stock filling level and tries to determine the relocation probability based on an equally distributed storage channel allocation. This means that every storage location has the same probability to be occupied. The same approach is used by Eder (Citation2020b) which approximates the real storage channel probabilities but does not match the analytically derived probabilities from Lippolt (Citation2003). Lehmann and Hußmann (Citation2021) shows how an operating strategy works, aiming at equally distributed storage channel allocations. The advantage of this modelling is the easy calculation ;therefore, relocations can be necessary during a storage operation. This paper fills the research gap and presents exact storage channel probabilities dependending on the stock filling level z for application-oriented operating strategies.
Besides the analytic models, simulation models are also presented in the literature. They have in common that new simulations have to be executed for new AS/RS configurations, which can be a time-consuming task. Travel time simulations exist for different depths of racks and different AS/RS variations. Van Den Berg and Gademann (Citation2000) presents a simulation study for a single-deep AS/RS, Atz, Lantschner, and Günthner (Citation2013) analyse single- and double-deep AS/RS and Marolt, Kosanić, and Lerher (Citation2022) investigate several multi-deep AVS/RS with nine strategies. The latter also use analytically derived closed form expressions for the movement times of vehicles, but not for the relocation probability and quantity unlike this work.
To sum it up, the available academic research for travel times models of multi-deep AS/RS with relocations, depending on the stock filling level, is based on Gudehus (Citation1972) and tries to transfer the basics for single-deep AS/RS to multi-deep AS/RS. The current research gap is that the random assignment of storage locations to new storage goods leads to very heterogeneous storage channel allocations. Even with a high stock filling level, there are empty storage channels, which might not be desirable in practice ; however, a random storage assignment strategy should regard this. This paper tries to close this research gap.
Further information on existing travel time models for AS/RS can be found in a review paper from Azadeh, De Koster, and Roy (Citation2019). Furthermore, the characteristics of mechanics of storage and retrieval machines as well as telescopic arm and satellite vehicle are obtained from Arnold and Furmans (Citation2005). Please note that simplified models for acceleration and deceleration of the vehicles have been used compared to Hwang and Lee (Citation1990).
3. Basics of travel time calculation
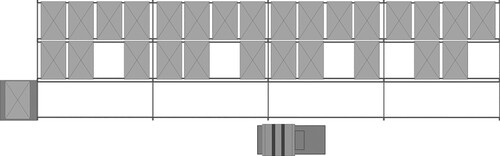
The travel time models developed in this paper are suitable for the following AS/RS configuration, which is also described in Figure . To keep the components of the models simple, only one aisle of an AS/RS with one rack at one side of the aisle is regarded. Furthermore, the input/output point (I/O point) of the storage goods is located on the lower left point of the single rack. The rack consists out of X storage channels in the horizontal direction and Y storage channels in the vertical direction. Every storage channel has n storage locations, which are organised in storage lanes , e.g. a double-deep AS/RS (n = 2) has two storage lanes of which the first lane is the storage lane at the wall and the second lane is the storage lane close to the aisle. Besides the AS/RS itself, the storage and retrieval machine – S/R machine – is the second important component. It can serve the whole rack and is able to move in horizontal and vertical direction simultaneously. Furthermore, it can only transport a single storage good at the same time.
Figure 1. View from the front and top on a rack in a triple-deep AS/RS (Lehmann and Hußmann Citation2022).
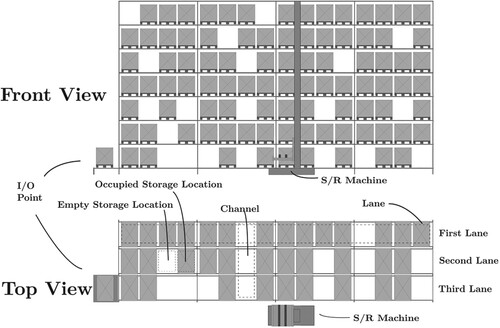
For such a AS/RS configuration, as shown in Figure , storage and retrieval operations can be executed in single- or dual-command cycles. In a single-command storage cycle, the S/R machine picks the storage good at the I/O point, drives to the storage channel, performs a channel drive to the storage location, stores the storage good into the storage location and moves back to the I/O point. This procedure is expressed in (Equation1(1)
(1) ).
(1)
(1) A single-command retrieval cycle works analogously, but if the storage good is blocked by other storage goods, the blocking goods must be relocated first. In a relocation, a S/R machine picks the blocking storage good, moves to a storage channel and in this a storage location and back to the original storage channel. This procedure is repeated until all blocking goods are relocated and result in (Equation2
(2)
(2) ).
(2)
(2) To spare some S/R machine movements, after a storage operation a retrieval operation can be executed directly, without returning to the I/O point, which results in a dual-command cycle. The movement time of the S/R machine is the same between a random storage channel and random relocation channel and between two random storage channels; therefore, a dual-command cycle can be expressed with (Equation3
(3)
(3) ).
(3)
(3) To calculate the summands of (Equation1
(1)
(1) ), (Equation2
(2)
(2) ) and (Equation3
(3)
(3) ), the following assumptions are set up.
Storage racks are ‘considered to be a continuous rectangular pick face’ where the input and output point (I/O point) is located in the ‘lower left-hand corner’ of the rack (Lerher et al. Citation2010).
Depending on the depth of the AS/RS, the S/R machine is either equipped with a telescopic arm (for
The S/R machine can move in the vertical and horizontal directions simultaneously and with such velocity that the full length and height X and Y reach at the same time. Bozer and White (Citation1982) call this characteristic ‘square in time’.
The acceleration and deceleration of the S/R machine, the telescopic arm and the satellite vehicle is regarded in this paper. It is also assumed that the maximal velocity can always be reached. This leads to a minor error for short movements, which will be addressed in Section 9.
The dwell point for all new command cycles is the I/O point.
No batching is regarded in this work, all storage goods are assumed to be unique.
The probability for a storage operation is the same as for a retrieval operation, which enables a steady-state of an AS/RS.
Storage and relocation operations push the storage goods as far as possible into a storage channel.
All retrieval operations choose one storage good randomly from all stored goods.
Storage operations are possible for all storage channels except already fully occupied storage channels.
Arnold and Furmans (Citation2005) provide the calculation for some summands of (Equation1(1)
(1) ), (Equation2
(2)
(2) ) and (Equation3
(3)
(3) ) with (Equation4
(4)
(4) ) and (Equation5
(5)
(5) ):
(4)
(4)
(5)
(5)
and
are dependent on the characteristics of the S/R machine. Only
,
,
,
and β depend on the storage and relocation strategies and are not determined yet. This gap will be closed in the following chapters for the four described storage and relocation strategies.
There are three further important characteristics of the AS/RS and single storage channels, which are important for the travel time models:
Channel state – Every storage channel in the AS/RS can be in one of n + 1 states. From
Channel state probability – Every storage channel has the probability
Stock filling level –
Table 1. Notation for the travel time calculation in this work.
Table 2. Abbreviations used in this work.
4. Random storage channel strategy – RSCS
To determine the relocation quantity, the average channel times, the relocation travel time and ultimately the total travel time, the steady-state of the rack, meaning the equilibrium probability distribution after a sufficient amount of storage and retrieval operations, are required. The basis for this are the single storage and retrieval operations, which lead to the steady-state of the rack. In general, n different storage operations can occur, and Figure shows exemplary 3 storage operations for a triple-deep AS/RS.
Figure 2. The three possible storage operations in a triple-deep AS/RS (Lehmann and Hußmann Citation2022).
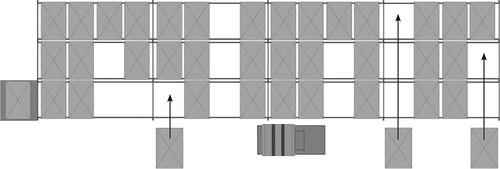
The probability, which storage operation is chosen, depends on the probabilities of the storage channel states . The probability of choosing the left storage operation in Figure can be determined by dividing the probability for an empty channel
by the probability of all valid storage channel types for a storage operation
. Equation (Equation6
(6)
(6) ) shows the generalised calculation for the storage probabilities
, where
is a storage operation into a channel type
.
(6)
(6) During the retrieval operations relocations may occur. Therefore, we divide the retrieval operations into a pure retrieval component – that includes the retrieval of the desired storage good itself – a relocation-retrieval component – that includes the retrieval of the relocation goods – and a relocation-storage component, meaning the transfer of the relocation goods to other storage channels. There are
potential retrieval components. Figure shows the six different retrieval components for a triple-deep AS/RS.
Figure 3. The six possible retrieval operations in a triple-deep AS/RS (Lehmann and Hußmann Citation2022).
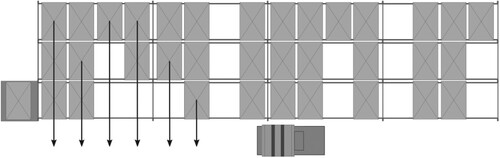
It is apparent that from a storage channel with a higher k, more different retrievals are possible and, therefore, the denominator in (Equation7(7)
(7) ) must account for this.
(7)
(7) The relocation-retrieval component can consist of a single relocation, but it is also possible that several relocations must be completed – as one can see in Figure at the right side. This means that over all
different retrieval components,
relocation components in the original storage channel are possible. Every relocation operation can combine one of these relocation-retrieval components with n relocation-storage components – similar to regular storage operations with a different starting point, resulting in the probability for every
to be chosen during a relocation:
.
displays the regular storage operations.
is the conditional probability that a channel of type
is chosen for a storage operation and a relocation-storage component and is calculated in (Equation8
(8)
(8) ). With Bayes' theorem (Equation9
(9)
(9) ) and (Equation10
(10)
(10) ) follow:
(8)
(8)
(9)
(9)
(10)
(10)
– the probability for a storage operation when the system is in the channel of type
– and
are necessary, to model the AS/RS with a Markov chain. Since the rack does not remember the order of former storage and retrieval operations and the next storage or retrieval operation is only depending on the current state of the rack, a Markov chain can be used to determine the channel state probabilities.
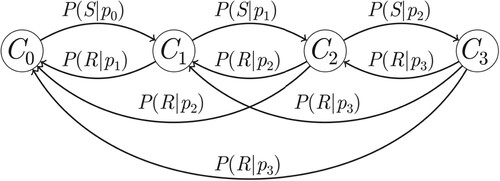
The state space of the Markov chain consists of n + 1 channel states. The channel state transitions during storage and retrieval operations can be described with the conditional probabilities and
. The Markov chain is represented by the
transition matrix M:
(11)
(11) For example, n = 3, the transition matrix is the following or more visible in Figure . α in Figure is 1 minus the sum of all other entries in the same row, because the sum of each row in a transition matrix must be 1. α represents the conditional probability that neither a storage nor relocation operation affects the channel type of the row in M. For example, the empty channel
has the conditional probability
that a storage operation occurs into a channel of type
when all channels
are regarded. And α is the conditional probability that
is not affected when storage or retrieval operations are carried out, which only concern other
than
.
(12)
(12) To get the desired channel state probabilities
, it is necessary to resolve the transition matrix M to
(13)
(13) Together with
, one solution for the system of Equation (Equation13
(13)
(13) ) can be given by Equation (Equation14
(14)
(14) ). It is only possible to display
in closed form depending on the probability of the empty channel state
.
(14)
(14) Γ in (Equation14
(14)
(14) ) is the Gamma function with
.
Figure 4. Markov chain of the triple-deep AS/RS (Lehmann and Hußmann Citation2022).
With the knowledge about and z it is now possible to determine
and β.
(15)
(15)
(16)
(16) Finally, it is possible to determine the times the S/R machine needs to perform storage operations –
, the retrieval component –
, the relocation-retrieval component –
– and the relocation-storage component
. Since storage operations always follow the stack principle, the movement steps correspond to the difference between the maximum channel depth n and the storage position k given by the channel type
weighted by the channel probability
, divided by the cumulative channel probability of the channels into which storage operations are possible. The same principls applies for the relocation-storage component.
(17)
(17) The expected retrieval time
is the average retrieval time of channel
weighted by channel probability
. Since for channel
the retrieval of all k storage goods has the same probability, the average retrieval time of channel
is given by the average of the movement steps associated with the k storage goods. The aggregated sum in the numerator is finally divided by a weighted sum of the channel probabilities; the weighting takes into account that for a channel
the retrieval probability is k times larger, because when randomly selecting a storage good in the rack, the probability of selecting a storage good in a filled channel is higher.
(18)
(18) The expression of the expected time of the relocation-retrieval component is closely related to (Equation18
(18)
(18) ), the inner sum iterating over all storage goods of any channel state starts at i = 2, in contrast to
, since i = 1 corresponds to the pure retrieval operation. Moreover, the expression
occurs in the sum – a Gaussian sum – which depicts that in a channel with k storage goods, for the ith storage good to be removed, all goods in front of it must also be removed; this additional inner sum can be simplified to the Gaussian expression.
(19)
(19)
5. Random storage location strategy – RSLS
When a storage channel is chosen in consideration of all free storage locations, storage channels with a few storage goods are preferred. This can be expressed by multiplying the probability for the choice of a certain storage channel by the number of empty storage locations in a channel in the numerator and also the denominator in
.
(20)
(20) This also leads to a new conditional probability for storage operations.
(21)
(21) The calculation of
and
stays the same as in (Equation7
(7)
(7) ) and (Equation10
(10)
(10) ) and also the transition matrix M stays the same. The transition matrix M can be resolved and the storage channel probabilities are obtained.
(22)
(22) Since only the probabilities during storage and relocation operations are calculated differently compared to Section 4, the calculation of
, β,
, and
is the same as in (Equation15
(15)
(15) ), (Equation16
(16)
(16) ), (Equation18
(18)
(18) ) and (Equation19
(19)
(19) ).
The channel times during storage operations and relocation-storage components do also differ from the RSCS strategy. For the RSLS strategy they are
(23)
(23)
6. Minimal variance strategy
In Sections 4 and 5, the channel state probabilities were derived from an underlying Markov chain. This procedure is not applicable for the minimal and maximal variance strategies, because only the retrieval operations follow a random strategy, and the storage operations must store in a certain storage channel. Instead, the minimal variance strategy stores a new storage good into a storage channel with the smallest
and chooses randomly from all storage goods for a retrieval operation. This way it is possible to reduce the fill level variance of all storage channels. In the perfect state of an AS/RS, there are always at most two storage channel states (
and
), as it is shown in Figure for a triple-deep AS/RS with z = 0.5625.
Figure 5. Example of the top view of a rack in a triple-deep AS/RS with a minimal variance strategy (Lehmann and Hußmann Citation2022).
This basic idea of the minimal variance strategy is used ad-hoc when deriving the channel state probabilities, the relocation probabilities and quantities as well as the channel travel times, although the perfect AS/RS, as shown in Figure , is not always satisfied, especially after retrieval operations with relocations. To compensate for this, we will use a correction term while deriving the storage and relocation-storage channel times.
The state probabilities of a storage channel correspond to a piece-wise linear function, where the probability for a channel state
rises until all storage channels are in this state, every further storage good reduces the probability linearly. The piece-wise linear probability function then corresponds to (Equation24
(24)
(24) ) for all n and z.
(24)
(24) It is now possible to determine the relocation probability and quantity.
(25)
(25)
(26)
(26) The expected retrieval channel time corresponds to (Equation27
(27)
(27) ). For the AS/RS in Figure it takes three steps of the S/R machine for the six storage goods in the first lane and 2 steps for the three storage goods in the second lane, which results in average
steps for a retrieval operation. The relocation-retrieval channel time
sums the channel times up for every possible relocation, which is divided by all possible relocations.
(27)
(27)
(28)
(28) In the perfect AS/RS from Figure , we always observe only two channel types
and
and, therefore, a S/R machine must perform n−k steps to reach the channel of type
. However, such a perfect AS/RS may be obsolete, for example, after retrieving out of the first lane in Figure . If such a retrieval happens, the next storage operation has to perform more steps than n−k. The correction term of the channel time is added in (Equation29
(29)
(29) ).
(29)
(29) The deviation of the perfect AS/RS has no or only a marginal influence on the other calculations in this chapter. Since we assume a continuous rack, single storage channels deviating from
nor
can be neglected except for channel times of storage operations or the relocation-storage components.
7. Maximal variance strategy
The maximal variance strategy pursues the goal that all storage channels are either completely filled or empty – for example, when filling a rack with a shortest leg strategy close to the I/O point. Additionally, storage channels can have other channel states after storage or retrieval operations. However, the next storage or relocation operations seek to eliminate these temporary channel states. For the determination of the channel state probabilities the other channel states are not relevant since the rack is continuous and the deviating channel states are very scarce compared to and
. It follows that the channel state probabilities only depend on z:
(30)
(30) For retrieval operations, only channels
are relevant and following Equations (Equation15
(15)
(15) ) and (Equation16
(16)
(16) ),
and
. The channel time for a retrieval operation is only depending on the depth of the AS/RS:
(31)
(31) When relocation operations are necessary, the S/R machine has to relocate 1 up to n−1 storage goods – depending on the location of the designated retrieval good – and, therefore
(32)
(32) Each dual-command cycle contains at least one storage operation. In an empty storage channel, the S/R machine has to perform n steps. However, retrieval operations may leave a storage channel, which is neither from type
nor
. Therefore, the average storage steps are lower than n. The same applies for the relocation-storage component.
(33)
(33)
8. Simulation and analysis
In this section, we verify and validate the previously derived formulas for the different strategies regarding the relocation probabilities and quantities as well as the travel time of a dual-command cycle in a discretised rack. Therefore, we use a discrete event simulation with a rack with realistic characteristics (see Table for the assumed characteristics of the AS/RS).
Table 3. Input parameters for the simulation. ,
,
,
,
are obtained from Marolt, Kosanić, and Lerher (Citation2022). The other parameters are based on the existing AS/RS and AVS/RS.
Discrete and thus a finitely sized rack with the parameters presented in Table are modelled. The I/O point is located in the bottom left corner, as assumed in Section 3. For each stock filling level from to
, in
increments, 100,000 dual-command cycles are executed and the relocation probability and quantity and the travel time of the dual command cycle are measured as performance indicators.
For each stock filling level, the warehouse is initially filled with storage goods according to one of the four storage strategies, afterwards the initial state probabilities, in particular, do not yet correspond to their equilibrium values. Subsequently, 10,000 dual-command cycles are performed according to the given strategy, allowing the state probabilities to converge towards the steady-state. Thereupon the 100,000 dual-command cycles are executed and the performance indicators to be measured. At any point in the simulation, all storage goods within the rack, their position and all channels with position and filling level are known.
While the derivation, especially for the state probabilities, assumes a continuous and thus large rack, a discrete rack must be used to verify the model, since only a finite number of states can be represented computationally. While the effect on the relocation probabilities and quantities is minimal for a rack of size X = 33 by Y = 11 and thus 363 channels, the use of the continuous way-time formulas (Equation4(4)
(4) ) and (Equation5
(5)
(5) ) lead to a significant error. To prevent this error, we use the following discrete formula for
and
according to Arnold and Furmans (Citation2005).
(34)
(34)
(35)
(35) One assumption for the analytic formulas (Equation4
(4)
(4) ) and (Equation5
(5)
(5) ) is that the rack must be ‘square in time’ Bozer and White (Citation1982). With the discrete formulas in (Equation34
(34)
(34) ) and (Equation35
(35)
(35) ), also racks without this characteristics can be modelled.
After the 100,000 dual-command cycles, the relocation probability and quantity and the dual-command cycle time as well as all further components mentioned in (Equation3(3)
(3) ) can be evaluated and compared with the analytic model. Evaluation for the three most important performance indicators –
, β and
occurs via the relative error between simulation results and analytic results:
(36)
(36) The relocation probability
for the example AS/RS is presented in Figure . As expected, the minimal variance strategy results in the lowest relocation probabilities for all stock filling levels. Since the RSLS prefers empty storage channels over more occupied channels, it is the strategy with the second lowest relocation probabilities over all stock filling levels. The difference to the RSCS is significant but not as big as the difference between the minimal variance and RSLS. The maximal variance strategy has a constant relocation probability over all stock filling levels, because this strategy leads to fully occupied and empty storage channels.
Figure 6. Relocation probabilities for the example AS/RS for the four strategies and the relative error between the simulation and the analytic model (Lehmann and Hußmann Citation2022).
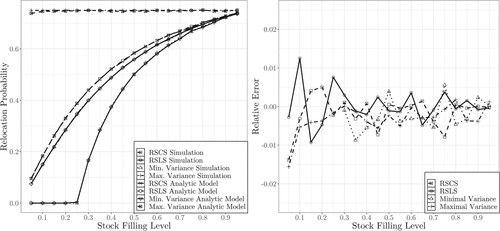
The relative error in Figure is for all stock filling levels. For medium and high stock filling levels, the relative error even stays
for all four strategies. One exception is the Minimal Variance at z = 0.25. In the analytic model no relocations occur at this stock filling level, because all storage channels are filled with exactly one storage good. In the simulation a storage operation is executed first, which results in one storage channel with two storage goods. The subsequent retrieval can, therefore, lead to a relocation. Due to the calculation of the relative error (See (Equation36
(36)
(36) )), it is 1 for the Minimal Variance at z = 0.25.
Figure shows the relocation quantities with similar results as for the relocation probabilities. The minimal variance strategy leads to the lowest number of relocations followed by the random storage location and the random storage channel strategies. The maximal variance strategy has a constant relocation quantity and is the worst strategy. Also, similar relative errors, as in Figure , can be observed. Except for the Minimal Variance strategy and Maximal Variance strategy and z = 0.05, the relative error stays and even
for medium and high stock filling levels.
Figure 7. Relocation quantities β for the example AS/RS for the four strategies and the relative error between the simulation and the analytic model (Lehmann and Hußmann Citation2022).
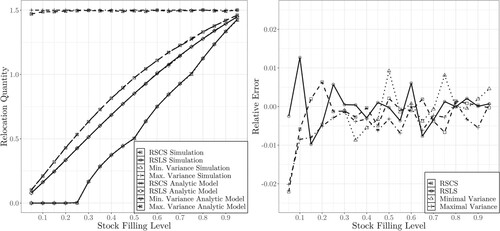
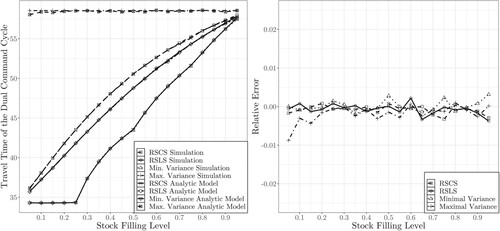
Figure shows the travel time of the dual command cycles. Since the relocation quantity is the only variable as a factor in (Equation3(3)
(3) ), it is also the decisive number for the dual-command cycle. This leads to the fact that the statements made for Figures and are also valid for Figure . The relative error between the simulation and analytic model is even reduced to
, except for the Maximal Variance strategy and z = 0.05.
Figure 8. Travel time for the example AS/RS for the four different strategies and the relative error between the simulation and the analytic model (Lehmann and Hußmann Citation2022).
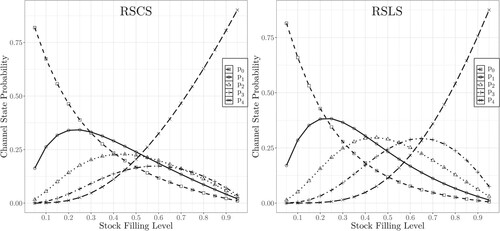
The results of the RSCS and RSLS strategies lead to a non-linear incline of with rising z. This can be observed, because the steady-state leads to non-symmetric distributed channel state probability allocations as it can be observed in Figure for the RSCS and RSLS strategies. The fast rising
and
lead to disproportionately relocations for small stock filling levels. This characteristic is more profound for the RSCS strategy than for the RSLS strategy. On the other hand, the relocation probability and dual-command cycle travel time rise less with higher stock filling levels. This is favourable for AS/RS which are typically operated with high stock filling level.
Figure 9. Analytically derived channel state probabilities for a 4-deep AS/RS and the RSCS and RSLS strategies (Lehmann and Hußmann Citation2022).
The characteristics of the Maximal Variance strategy are as expected. Due to only completely full or completely empty storage channels, the relocation probability and quantity and the travel time are independent from the stock filling level. The Minimal Variance strategy is marked by the characteristic curves of relocation quantity between the stock filling levels with (see Figure – e.g. between z = 0.25 and z = 0.5). A new storage good stored into such a perfect rack situation ( e.g. z = 0.25) leads to a disproportional increase in the relocation quantity. The more storage goods in the newly occupied storage lane ( e.g. the second lane in Figure ), the smaller the additional relocation quantity. Again, this influence decreases with high stock filling levels and feeds on a linear increase.
9. Managerial implications
The developed models can be applied in real life settings. However, the logistician specialists should be aware of the most crucial outcomes, important annotations and limitations of this work.
The main aspect of this work is that the relocation probability and quantity do only depend on the stock filling level and depth of the AS/RS. The number of storage channels in the horizontal or vertical direction does not influence the relocation probability and quantity. Tables and present the relocation probability and quantity for for all four strategies. These values can either be directly adapted for real life AS/RS or be used for the creation of travel time models for similar storage systems.
Table 4. Relocation probability and quantity β for AS/RS with depth n = 2, n = 3, n = 4 and n = 5 and the RSCS and RSLS strategies for z from
to
and
.
Table 5. Relocation probability and quantity β for AS/RS with depth n = 2, n = 3, n = 4 and n = 5 and the Minimal Variance and Maximal Variance strategies for z from
to
and
.
The models can be used to either evaluate the travel times and throughput of planned AS/RS or to benchmark existing AS/RS. For the evaluation of planned AS/RS, different AS/RS settings can be compared by calculating the RSCS, RSLS or Minimal Variance travel times. The RSCS strategy is thereby easier to implement than the RSLS, because only binary information about the storage channels must be available. The Minimal Variance strategy has, in general, slightly larger dead time, since finding the storage channel with the fewest storage goods in an AS/RS is more complex than finding a random storage channel. Calculated travel times, relocation probabilities and quantities can be compared by the logistics specialist. Existing AS/RS can be benchmarked against the RSCS or RSLS strategy and the Minimal Variance strategy. A storage system in operation should have relocation probability and quantity between the random and Minimal Variance strategy.
The main advantages for logistics specialists using the models are the comparability with four strategies, easy applicability through closed-form expressions and high accuracy of the models compared with simulation. Furthermore, AS/RS operated in a steady state differ from most models presented in the literature (See Chapter 2). These AS/RS can be evaluated with the models presented in this paper.
A comparison between the four strategies yields that the Minimal Variance strategy should be preferred by logistics specialists, because the overall travel time is lower for all AS/RS configuration than the other strategies due to the lowest relocation probability and quantity. The AS/RS should be operated at or close under a stock filling level with .
Like all models, the four models presented in this paper are also subject to limitations. We assume that no information is available upfront regarding which storage goods will be retrieved or stored. If this information is available, relocations could be avoided, and travel times will be lower as calculated with the models in this work. Another limitation is the assumption that the distance between the storage and retrieval channel – – is randomly distributed over all storage channels. When a shortest leg policy is applied, travel times could be reduced. Finally, we do use a simplified kinematics model for the S/R machine and the telescopic arm or satellite vehicle. When a more realistic kinematic model is used (e.g. Hwang and Lee Citation1990), the usability for real life AS/RS could be improved.
10. Conclusion
This paper derives and presents four travel time models for multi-deep AS/RS with four storage allocation strategies. For the random storage channel and random storage location strategies, Markov chains are used to determine the channel state probabilities of a random observed storage channel. Based on these probabilities, further parts of the travel time models, such as the relocation quantities and channel travel times, are derived. All parts of the travel time models for the variance-based strategies are based on ad-hoc assumptions concerning the storage channel probabilities.
All four travel time models offer the storage channel probabilities, relocation probability, relocation quantity and channel travel times as performance indicators of different AS/RS next to the total travel times of single-command storage and retrieval cycles and dual-command cycles. The minimal variance strategy leads to the lowest relocation probability and quantity and, therefore, also the lowest travel times followed by the RSLS and the RSCS. The maximal variance strategy leads to the highest relocation probability and quantity and also travel time. All four strategies are confirmed by the discrete-event simulation. The simulated travel times of dual-command cycles deviate by less than 0.5% compared to the analytic models for all stock filling levels.
This paper lays the foundation for several othertopics.
The storage channel is chosen randomly over all channels of a certain channel state for the RSCS and RSLS during a storage operation. This leads to an average movement time of the S/R machine. This random choice can be replaced, for example, by a shortest leg policy
This paper regards only one I/O point on the left bottom corner of the AS/RS. Future travel time models can include more I/O points
The relocation probabilities and quantities can also be applied to other AS/RS variants such as vehicle AS/RS or flow-rack AS/RS
This paper only regards racks ‘square in time’ for the analytic continuous rack model (Bozer and White Citation1982). Due to the discrete formulas used for small racks, also other racks can be covered with the models in this paper. However, it is desirable to find a compensation term to be able to express also small racks with an analytic continuous rack model. This should be further investigated.
Disclosure statement
No potential conflict of interest was reported by the authors.
Data availability statement
The data that support the findings of this study are available from the corresponding author, Timo Lehmann, upon reasonable request (Lehmann andHußmann Citation2022).
Additional information
Funding
Notes on contributors

Timo Lehmann
Timo Lehmann studied Industrial Engineering and Management at the Karlsruhe Institute for Technology (KIT). He is a research associate at the Institute for Material Handling and Logistics (IFL) at KIT and his research focus is on the performance evaluation of material flow and production processes with analytic models.
Jakob Hußmann
Jakob Hußmann studied Industrial Engineering and Management at the Karlsruhe Institute for Technology (KIT). His research interests include analytical performance evaluation of material flows, computational methods and economics.
References
- Arnold, Dieter, and Kai Furmans. 2005. Materialfluss in Logistiksystemen. Vol. 6. Berlin/Germany: Springer.
- Atz, T., D. Lantschner, and W. A. Günthner. 2013. “Simulative Throughput Calculation for Storage Planning.” In The International Workshop on Applied Modelling and Simulation WAMS 2013.
- Azadeh, Kaveh, René De Koster, and Debjit Roy. 2019. “Robotized and Automated Warehouse Systems: Review and Recent Developments.” Transportation Science 53 (4): 917–945.
- Bozer, Yavuz A., and John A. White. 1982. “Travel Time Models for Automated Storage/Retrieval Systems.” Technical Report. Georgia Institute of Technology.
- Bozer, Yavuz A., and John A. White. 1984. “Travel-time Models for Automated Storage/retrieval Systems.” IIE Transactions 16 (4): 329–338.
- D'Antonio, Gianluca, and Paolo Chiabert. 2019. “Analytical Models for Cycle Time and Throughput Evaluation of Multi-shuttle Deep-lane AVS/RS.” The International Journal of Advanced Manufacturing Technology 104 (5–8): 1919–1936.
- de Koster, R. M. B. M., Tho Le-Duc, and Y. Yugang. 2008. “Optimal Storage Rack Design for a 3-dimensional Compact AS/RS.” International Journal of Production Research 46 (6): 1495–1514.
- Eder, Michael. 2020a. “An Approach for a Performance Calculation of Shuttle-based Storage and Retrieval Systems with Multiple-deep Storage.” The International Journal of Advanced Manufacturing Technology 107(1), 859–873.
- Eder, Michael. 2020b. “An Approach for Performance Evaluation of SBS/RS with Shuttle Vehicles Serving Multiple Tiers of Multiple-deep Storage Rack.” The International Journal of Advanced Manufacturing Technology 110 (11): 3241–3256.
- Federation Europeenne de la manutention (FEM). 2001. “FEM 9.851: Performance Data of S/R Machines – Cycle Times.”
- Gudehus, Timm. 1972. “Grundlagen Der Spielzeitberechnung Für Automatische Hochregallager.” Deutsche Hebe- und Fördertechnik 18: 63–68.
- Hwang, Hark, and Seong Beak Lee. 1990. “Travel-time Models Considering the Operating Characteristics of the Storage and Retrieval Machine.” The International Journal of Production Research 28 (10): 1779–1789.
- Latéfa, Ghomri, and Zaki Sari. 2017. “Mathematical Modeling of the Average Retrieval Time for Flow-rack Automated Storage and Retrieval Systems.” Journal Of Manufacturing Systems 44: 165–178.
- Lehmann, Timo, and Jakob Hußmann. 2021. “Travel Time Model for Multi-deep Automated Storage and Retrieval System with a Homogeneous Allocation Structure.” Logistics Research 14 (1): 5. doi:10.23773/2021_5.
- Lehmann, Timo, and Jakob Hußmann. 2022. “Travel Time Model for Multi-Deep Automated Storage and Retrieval Systems with different Storage Strategies.” doi:10.5445/IR/1000147666
- Lerher, Tone. 2016. “Travel Time Model for Double-deep Shuttle-based Storage and Retrieval Systems.” International Journal of Production Research 54 (9): 2519–2540.
- Lerher, Tone, Matjaz Sraml, Iztok Potrc, and Tomaz Tollazzi. 2010. “Travel Time Models for Double-deep Automated Storage and Retrieval Systems.” International Journal of Production Research 48 (11): 3151–3172.
- Lippolt, Christian R. 2003. “Spielzeiten in Hochregallagern Mit Doppeltiefer Lagerung.” PhD diss., Institute for Material Handling and Logistics; Karlsruhe Institut of Technology.
- Manzini, Riccardo, Riccardo Accorsi, Giulia Baruffaldi, Teresa Cennerazzo, and Mauro Gamberi. 2016. “Travel Time Models for Deep-lane Unit-load Autonomous Vehicle Storage and Retrieval System (AVS/RS).” International Journal of Production Research 54 (14): 4286–4304.
- Marolt, Jakob, Nenad Kosanić, and Tone Lerher. 2022. “Relocation and Storage Assignment Strategy Evaluation in a Multiple-deep Tier Captive Automated Vehicle Storage and Retrieval System with Undetermined Retrieval Sequence.” The International Journal of Advanced Manufacturing Technology118 (9): 3403–3420.
- Sari, Zaki, Can Saygin, and Noureddine Ghouali. 2005. “Travel-time Models for Flow-rack Automated Storage and Retrieval Systems.” The International Journal of Advanced Manufacturing Technology 25 (9–10): 979–987.
- Van Den Berg, Jeroen P., and A. J. R. M. Gademann. 2000. “Simulation Study of An Automated Storage/retrieval System.” International Journal of Production Research 38 (6): 1339–1356.
- Verein Deutscher Ingenieure (VDI). 2002. “VDI 4480/4: Durchsatz von Automatischen Lagern mit Mehrfachtiefer Lagerung.”
- Xu, Xianhao, Xiaozhen Zhao, Bipan Zou, and Mingze Li. 2019. “Optimal Dimensions for Multi-deep Storage Systems Under Class-based Storage Policies.” Cluster Computing 22 (3): 861–875.
- Yang, Peng, Lixin Miao, Zhaojie Xue, and Lei Qin. 2015. “Optimal Storage Rack Design for a Multi-deep Compact AS/RS Considering the Acceleration/deceleration of the Storage and Retrieval Machine.” International Journal of Production Research 53 (3): 929–943.
- Yang, Peng, Kaidong Yang, Mingyao Qi, Lixin Miao, and Bin Ye. 2017. “Designing the Optimal Multi-deep AS/RS Storage Rack Under Full Turnover-based Storage Policy Based on Non-approximate Speed Model of S/R Machine.” Transportation Research Part E: Logistics and Transportation Review 104: 113–130.
- Yu, Yugang, and René B. M. de Koster. 2009. “Optimal Zone Boundaries for Two-class-based Compact Three-dimensional Automated Storage and Retrieval Systems.” IIE Transactions 41 (3): 194–208.