
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.ABSTRACT
Picker to parts order picking (OP) systems are one of the most labour-intensive warehouse operations, accounting for 55% of warehouse expenses in the e-commerce industry. For this reason, the e-commerce industry has invested in fully automated and robotised warehouses. However, these warehouse solutions are very expensive. Furthermore, with the advent of Industry 5.0 with a human-centric focus, the OP system's automation should be designed and implemented in ways to improve the working conditions of the order pickers rather than replacing them completely. A pick and transport robot (PTR) is a solution for OP systems which is compatible with Industry 5.0. An example of such a solution is Grab™ by SOLWR. Previous studies have barely investigated the human factor effects of using PTRs in OP systems while optimising the performance of the systems. This research develops a mathematical model to optimise the performance of a picker to parts OP system using PTRs in terms of productivity, quality, and the well-being of the order pickers. The developed model is tested by using data from a case company. The results of this study support managerial decisions by achieving a better knowledge of how to set up such PTR solutions.
1. Introduction
In recent years, the competition within warehouses and manufacturing facilities to handle more orders with shorter delivery times has intensified due to new industry trends, e-commerce, and higher customer expectations. Automation in an order picking (OP) system has been proposed to shorten delivery response times, improve picking precision, and maximise the space usage (Caputo and Pelagagge Citation2006; Marchet, Melacini, and Perotti Citation2015). Over the last few years, order picking automation has achieved unprecedented levels of application, with major e-commerce firms such as Amazon and Alibaba spending substantial amounts on the construction of new automated warehouses (Boysen, De Koster, and Weidinger Citation2019). According to Chui, Manyika, and Miremadi (Citation2016), numerous warehouse activities can be automated, and many of the tasks currently done by human operators are likely to be carried out by technology in the near future.
However, a fully automated solution requires huge investment and effort to implement. As an alternative, partially automated warehouse solutions have evolved as a result of the development and use of warehouse robot pickers (Azadeh, De Koster, and Roy Citation2019; De Lombaert et al. Citation2022; Grosse Citation2023; Lorson, Fügener, and Hübner Citation2022; Sgarbossa et al. Citation2020a; Winkelhaus et al. Citation2022). These solutions may coexist alongside manual order pickers, resulting in a scalable solution that can be installed with far less investment than fully automated warehouse systems. It is also crucial to remember that partially automated warehouse solutions have an influence on the order pickers’ human factors (HF) such as physical, mental, perceptual, and psychosocial aspects (Lee and Seppelt Citation2009; Neumann et al. Citation2002; Neumann and Dul Citation2010; Winkelhaus, Grosse, and Morana Citation2021).
If these solutions are not appropriately planned with HF aspects in mind, they may lead to unintended variations in OP system performance by increasing the time and cost of operations while decreasing productivity and the quality of work (Sobhani et al., Citation2017). Work-related order pickers’ fatigue, stress, and consequent injuries may result from the lack of understanding of HF aspects and their consequences at work, decreasing workers’ performance as well as increasing their working errors. These HF-related performance changes are related to the working quality, and significantly impact operation systems’ performance (Kolus, Wells, and Neumann Citation2018; Yung et al. Citation2020). Grosse et al. (Citation2016) classified an OP system's performance outcomes into three categories: productivity, well-being, and quality. These three performance outcomes were chosen because they have an impact on the system's design and the characteristics of the order picker executing the required OP tasks (Grosse et al. Citation2015). Therefore, to increase the performance of an OP system, it is critical to consider HF while making decisions about implementing new solutions in the system (Falkenberg and Spinler Citation2022).
This research focuses on an OP solution using a pick and transport robot (PTR) called Grab™, created by SOLWR (Sgarbossa et al. Citation2020b). In this warehouse solution, robots employ an automated guided vehicle (AGV) and put items onto a pallet carried by the AGV. The Grab™ may then go through the warehouse, selecting items and placing them on the pallet, which is subsequently delivered to the depot. The primary advantage of pick and transport robots is that they do not necessitate any changes to integrate this degree of automation into an existing warehouse layout, as other types of automation do (Winkelhaus et al. Citation2022). As a result, this can greatly benefit warehouses that require automation but face difficulties in modernising the warehouse layout. It is also possible to create dynamic zones with a PTR by varying the size of the zones for the robot and the order picker. That is, the size of the zone in which the robot must accomplish its OP tasks may be changed easily. Understanding how the pick and transport robot can aid and affect the order pickers in an OP system is critical (Figure ).
Figure 1. Grab™ by SOLWR.

There are still certain gaps in our understanding of the human-technology interaction (De Lombaert et al. Citation2022). Humans and robots, for example, have intrinsic capabilities that must be addressed while operating inside a designed OP system (De Lombaert et al. Citation2022; Grosse et al. Citation2015). Additionally, a majority of OP warehouses continue to be manually operated, with order pickers walking through the warehouse to retrieve products from shelves, emphasising the critical role played by humans in an OP system. Unfortunately, humans with their particular qualities are frequently overlooked in order picking system decision making (Grosse et al. Citation2015; 2017). The advent of Industry 4.0 has led to a significant transformation in the duties of human operators in operating systems due to the advancements in technology that have led to the creation of advanced digitalised and automated work environments (De Lombaert et al. Citation2022). Despite the obvious centrality of HF in four of the Industry 4.0 development goals, (managing complex systems, safety and security, work organisation and design, and training and professional development), HF has received relatively little attention so far (Neumann et al. Citation2021). When Industry 4.0 is implemented in an OP system, order pickers are replaced by robots and digital technologies to fulfil OP tasks (Winkelhaus, Grosse, and Morana Citation2021). For example, the PTR with a completely automated solution is able to perform all of the order picker's tasks. Despite the fact that automation and digital technologies are becoming more frequent in OP systems, however, it is commonly recognised that humans will continue to play a significant role (Sgarbossa et al. Citation2020b; Winkelhaus, Grosse, and Morana Citation2021). Since the early 20s the European Commission has begun to advocate a new approach to address the lack of social and environmental sustainability in ‘4.0″ concepts, promoting a drive for a more sustainable successor, termed ‘Industry 5.0″. The well-being of the worker is put at the centre of the production process in Industry 5.0, and workers use novel technologies to bring prosperity beyond jobs and advancement while respecting the planet's constraints on production (Breque, De Nu, and Petridis Citation2021). The Industry 5.0 concept addresses the shortcomings of Industry 4.0 by explicitly focusing on human and planetary outcomes in the system, resulting in human-centric, robust, and sustainable systems (De Lombaert et al. Citation2022; Panagou, Neumann, and Fruggiero Citation2023). When it comes to the OP system, with the implementation of Industry 5.0, technologies should support the order pickers in performing their order picking tasks rather than eliminating them from the system. For example, although the PTR has highly autonomous capabilities, it should not be considered to aid order pickers in doing their own OP tasks. However, there are several challenges connected with combining PTRs and order pickers in a warehouse according to Industry 5.0 concepts. For example, there are the questions of how many order pickers and robots should be utilised, how much work they should perform, how the zone in which they operate should be split, what kind of items the order picker and robot must pick, and so forth.
To overcome these challenges, the research aim of this paper is to improve the performance outcomes of picker to parts OP systems using a human-centric approach while taking both PTRs and order pickers into consideration. This research is extending previous research carried out by the authors with first, a literature review conducted to highlight the gap in the current research, and second, with a mathematical model developed to tackle the challenges relating to a human-centric approach with PTRs and order pickers, hence improving the productivity, well-being, and quality of the OP system.
The organisation of the paper is as follows. Section 2 presents a literature review to show the novelty of the study. Thereafter, section 3 highlights the description of the problem, followed by section 4, which presents the mathematical model developed. The numerical analysis is presented in section 5, including the operational data and the prime scenario. Section 6 discusses the parametric analysis to show the novelty of the mathematical model developed. The discussion is presented in section 7, and finally, section 8 goes on to explain the conclusion.
2. Literature review
There have been different technologies introduced in picker to parts OP systems such as paperless picking, AGV/AMR, and pick and transport robots (Vijayakumar and Sgarbossa Citation2021). Paperless picking uses a device like a handheld barcode or RFID reader, pick to light (PTL), pick to voice (PTV) or a head-mounted display (HMD), which assists the order picker in searching for the desired items. AGV/AMR guides the order pickers in moving products to and from the desired locations and the depot (Fragapane et al. Citation2021). Finally, the pick and transport robot is a fully automated solution in a picker to parts OP system that moves autonomously inside the warehouse, finds the desired items, picks the items, and brings them back to the depot. From all of the available options, it is evident that the PTR has a large number of research opportunities with its completely automated picker to parts OP system, which might work side by side with order pickers helping them in all their OP tasks.
According to Vijayakumar and Sgarbossa (Citation2021), there have been few research studies on pick and transport robots, mostly presented in conference papers. Among these conference papers, Kauke, Sailer, and Fottner (Citation2022) examined different aisle widths and layouts of the warehouse, where one zone is dedicated to the robot and the other to the order picker. Zhang, Winkelhaus, and Grosse (Citation2021) developed a simulation considering the energy expenditure of order pickers working in close collaboration with a PTR. Tian et al. (Citation2020) studied path improvement for the PTR and showed how the newly proposed path improves efficiency when compared with a conventional OP system. Sgarbossa et al. (2020b) presented a method for assigning products to a robot zone and an order picker zone, respectively, with the objective of minimising the workload on order pickers and maximising the similarities between product categories. This is significant because grouping categories together saves operating expenses at grocery stores by reducing the time required for unstacking mixed pallets. Weisenboehler and Wurll (Citation2020) studied the design of a gripper for a PTR that picks fashion items in a warehouse. D’Avella and Tripicchio (Citation2020) studied a PTR that assists an impaired worker to pick and place items from desired locations. Zou, Zhang, and Qi (Citation2019) developed a mathematical model to study the collaboration between the PTR and order pickers considering order batching, routing, and scheduling. Kimura et al. (Citation2015) demonstrated a dual-arm PTR built on model-based object recognition. Bonini, Urru, and Echelmeyer (Citation2016) studied the economic benefits of having a PTR for small and medium enterprises.
According to Zhang, Winkelhaus, and Grosse (Citation2021), a hybrid order picking system with specific assignment criteria for picking tasks can reduce both the system's operational costs and human workload when compared to a manual or totally automated OPS. Winkelhaus et al. (Citation2022) stated that a hybrid order picking system with both robots and order pickers could increase throughput and also reduce the operating cost when compared to the situation with just order pickers. Therefore, it is very important to understand the operational policies of how a hybrid order picking system would improve the performance of an OP system. Fager, Sgarbossa, and Calzavara (Citation2021) focused on the cost of the PTR and order pickers as well as quality when compared with a manual OP system. Secondly, D’Souza, Costa, and Pires (Citation2020) studied the design of a PTR for an OP system. Finally, Lee and Murray (Citation2018) addressed a new problem known as the ‘pick, place, and transport vehicle routing problem’, to minimise the travel time for the PTR while performing the OP tasks. Table contains a summary of all these works.
Table 1. Summary of literature on pick and transport robots in order picking system.
When it comes to the examination of the human-centric approach in PTR research that considers both the PTR and the well-being of order pickers, there has been relatively little literature (De Lombaert et al. Citation2022; Vanheusden et al. Citation2022). Zhang, Winkelhaus, and Grosse (Citation2021) and Zhang, Winkelhaus, and Grosse (Citation2021) developed a simulation and analysed energy usage of order pickers working with PTR, and allocate tasks based on individual energy expenditure. Sgarbossa et al. (2020b) investigated ways to reduce the workload on order pickers by reducing the weight of the items assigned to them. However, the majority of the research described above that investigated hybrid order picking systems primarily considered a collaborative arrangement in which the robot and order pickers operate in the same zone. There have been fewer studies that have separated the zones for the robot and order pickers. As a result, this research will analyse a situation in which the robot and order picker will accomplish order picking tasks in their respective zones.
According to the literature review findings, there are still various research opportunities in the field of PTRs in picker to parts OP systems. A majority of studies have not looked at the human-centric application of the PTR as an assistive technology for pre-existing order pickers in the system. The research that addressed HF aspects overlooked the size of the zones for the PTR and order pickers. Furthermore, no research has included all three performance objectives of an OP system i.e. productivity, quality, and order picker well-being. As a result, the authors sought to address the shortcomings raised above in this study.
3. Problem description
From the above section, it is clear that there is a need for a human-centric application of PTRs in picker to parts OP systems. To guarantee safe and effective picking operations in a warehouse with both pick and transport robots and order pickers, the picking areas may need to be divided into two major zones: one for robots and one for order pickers (Winkelhaus, Grosse, and Morana Citation2021). While regulating throughput between the two zones, warehouse zoning should also take into consideration other aspects. Heavy items with high demand should be assigned to the robot zone to avoid physical fatigue for the order pickers, which could improve the quality and efficiency of the OP system (Grosse et al. Citation2015). However, having two different zones where the worker in each zone has different speeds presents some challenges in terms of balancing the workload. The first issue is determining how many robots and order pickers should be engaged in the OP system, followed by deciding the zone sizes in terms of the number of picking places, number of robots, and the order pickers working in the zone to maximise throughput and reduce warehousing costs. The second challenge is determining the robot's pick ability, because not all products can be picked by the robot's arm. The robot has limits when it comes to picking up irregular shapes, such as fruits, vegetables, a single shampoo bottle, etc. This study develops a mathematical model to optimise a picker to parts order picking system with PTRs and order pickers to improve the performance of the system by considering the physical aspects of the order pickers. In addition, a thorough investigation and analysis of the impact of numerous factors on the performance outcomes are accomplished.
4. Mathematical model
The objective function of the optimisation model includes three parts in order to minimise the cost of operations, the energy expenditure of the order pickers, and the error rate of the picking operation. The assumptions, indexes, and parameters used in this study to develop the mathematical model are listed below:
The robot and order pickers complete their OP tasks in two separate zones.
The products that can be picked by the robot are placed in the robot zone.
The time used for the different tasks (setup, travel, search, and pick) for order pickers and robots varies.
The daily cost of employing order pickers and robots are the only costs considered.
Overtime costs are not considered.
The order pickers walk to all destinations.
The index and parameters used in this paper are defined as follows:
Index
| i | = | Items to be picked, i = 1,2,3,4 … … … I |
| j | = | Days, j = 1,2,3,4 … … … . J |
| s | = | Worker, s |
| o | = | Orders, o = 1,2,3,4 … … … O |
Parameters
| = | Pickability of the item i | |
| = | Cost of workers, s | |
| = | Time for fixed activities, s | |
| = | Travel time, s | |
| = | Search time, s | |
| = | Pick time, s | |
| = | Quantities of item i picked in day j | |
| = | Number of lines per item i picked in day j | |
| = | Number of lines per item i in an order o | |
| = | Number of orders per item i picked in day j | |
| = | Total number of orders picked | |
| = | Worker's working hours per day, s | |
| = | Worker's average moving speed, s | |
| nRa | = | Number of robot aisles |
| = | Width between two aisles | |
| = | Length of aisles | |
| = | Distance between the depot and the centre of the first couple of aisles | |
| = | Total number of aisles for the worker, s | |
| = | Order picker error rate | |
| = | Robot error rate |
Variables
| = | Number of workers, s | |
| = | Average quantities picked by the worker per day, s | |
| = | Average lines picked by the worker per day, s | |
| = | Average orders picked by the worker per day, s | |
| = | Average number of lines per order | |
| = | Sum of distance travelled within aisles | |
| = | Distance travelled within the aisle | |
| = | Distance travelled across the aisle | |
| = | The farthest aisles to be visited by the worker, s | |
| = | Number of expected aisles that have to be visited by the worker, s | |
| = | Total energy expenditure rate | |
| = | Energy expenditure for picking | |
| = | Energy expenditure for setup | |
| = | Energy expenditure for travel | |
| = | Energy expenditure for search |
Decision variable
The general optimisation problem is written as follows:
(1)
(1) subject to
(2)
(2) Equation (1) is the 3-dimensional objective vector, where
is the binary variable, where 1 corresponds to the robots and 0 to the order pickers. Constraint (2) ensures that items that are only pickable by the order picker are placed in the order picker zone.
4.1. Minimise the daily cost of the picking operations
The picking operation's cost is calculated as follows:
(3)
(3) The cost-related constraints are as follows. Equation (4) shows the number of robots and order pickers. Equation (5) is the number of items picked by the workers, Equation (6) is the number of lines picked by the workers, and Equation (7) the number of orders picked by the workers.
(4)
(4)
(5)
(5)
(6)
(6)
(7)
(7)
While can be considered as constants, the time for travel
varies according to the order picker's distance travelled,
, the configuration of the storage area, and the number of the aisles (Tompkins et al. Citation2010). Therefore,
can be expressed as:
(8)
(8)
is the sum of the distance travelled within the aisle
and cross-aisle
(Caron et al. Citation1998).
is the average number of lines per order.
determines the average number of locations visited in an aisle and is calculated by Equation (10).
determines the farthest pick location visited by the worker in an aisle, where
determines the total number of picking locations for one side of an aisle.
(9)
(9)
(10)
(10)
(11)
(11)
(12)
(12)
4.2. Minimise the energy expenditure of order pickers
The repeated execution of the same tasks can lead to fatigue, which can have a negative impact over time and result in decreased efficiency of the operator (Battini et al. Citation2017). Fatigue is classified into two types: psychological and physiological (Gawron, French, and Funke Citation2001). Psychological fatigue is associated with the mental fatigue that an operator has while performing the task, which can only be detected by subjective evaluation. In this case, we consider physiological fatigue instead, since it may result in a decrease in generating force or an increase in reaction time, requiring the order picker to expend a significant amount of energy while executing OP tasks (Battini et al. Citation2017), thereby having a negative influence on the OP system's performance outcomes (Battini et al. Citation2017). The energy expenditure for the order picking system will be measured for the order pickers. Thus, the objective function introduced below represents the average energy expenditure rate of the order pickers considering all the OP tasks.
(13)
(13) EE represents the order pickers’ energy expenditure rate for the order picking system.
(14)
(14) Garg et al. (Citation1978) have introduced the energy expenditure for different tasks in order picking systems, as shown below.
(15)
(15)
(16)
(16)
(17)
(17)
(18)
(18)
4.3. Minimise the error rate of picking operation
This objective function aims to minimise the error rate of both order pickers and robots. The errors from order pickers are caused due to factors such as picking the wrong item, the wrong quantity of a specific item, or missing some item. The average error rate of a manual picker to parts OP system is about 0.26% (Vidovič and Gajšek Citation2020). On the other hand, there are also robot errors that trigger damage to items as they are being picked from the desired locations
. The objective function to minimise the error rate is demonstrated below.
(19)
(19) Following the development of the mathematical model, multiple scenarios are developed to confirm the validity of the model and also to compare various outcomes.
5. Numerical study
After developing the mathematical model, the operational data for the study were collected from a case company, which helps to validate the developed model and also provides empirical results. Also, the case company provided two datasets to simulate the robots and order pickers within the order picking process. The first dataset had all the product characteristics of the SKUs (stock keeping unit) in the warehouse. The second dataset consists of the item number, order number, quantities, and date. The validated constructed model is built in GAMS 36.1.0. GAMS (General Algebraic Modeling System) and is made up of a language compiler for mathematical programming and optimisation. The model is written into GAMS and the model is then initialised. The first step is to acquire the input data for the model. Following that, the picking area must be designed, e.g. the number of aisles, length of aisles, width of the cross-aisles, etc. The constraints for the model's variables are set before running the model. Then the model is run in GAMS, and the solutions from the model are evaluated. If the solutions are feasible, then the results are noted. However, if the solutions are infeasible, then the model must be reinitialised with new constraints.
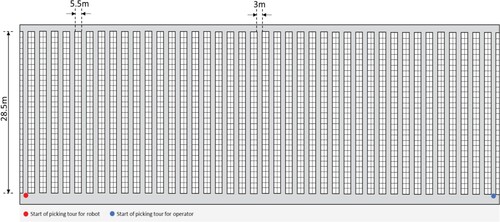
To conduct the multiple scenarios, the data for testing the model are obtained from a case company. The case company is a grocery wholesale distributor. The storage area of the case company covers 27,000 m2 and contain over 30,000 SKUs. The storage area consists of cold, frozen, and dry zones. In this case, the study is limited to the dry storage area, which has 3500 to 4000 picking locations in selected pallet racks spread across two picking levels. The streamlined layout of the dry storage area is shown in Figure .
Figure 2. Warehouse layout of the case company.
5.1. Operational data
The case company has a storage strategy based on product attributes such as stackability, with heavier items such as canned meals placed at the beginning of the pick tour and lighter, more fragile items such as light bulbs and toilet paper placed at the end. As a result, the heavier items will be towards the bottom of the pallet, while the lighter things will be at the top. Because similar categories often have the same packaging, this storage policy bundles them together. The operational data on the present OP process, which only employs order pickers, are stated in Table . The operational data regarding the shelf layout and the warehouse size are listed in Table . The operational data regarding the robot are provided in Table .
Table 2. Operational data about the order picker and current order-picking process at the case warehouse.
Table 3. Operational data about shelf layout and warehouse sizes.
Table 4. Operational data about the robot.
As there are several possible solutions to the problem presented in this paper, each with different worker counts and zone sizes, the analysis must be able to explain how the various solutions differ and the trade-offs between them. Chiefly, two different situations were considered: first, changing the number of robots and order pickers, and second, changing the number of aisles in each zone for robots and order pickers respectively. These particular situations were taken into consideration because the PTR is a flexible solution, with the possibility of changing the number of robots, and also dynamic zoning is possible (Sgarbossa et al. Citation2020b). The number of robots ranged from 1 to 5, corresponding to a drop in the number of order pickers from 15 to 11. Also, the number of aisles in the robot zone increased from 2 to 4, resulting in a decrease in the number of aisles in the order pickers’ zone from 39 to 37. These two situations are referred to as the prime scenario. Following that, the performance outcomes in terms of productivity, well-being, and quality under this prime scenario are addressed in further detail. The scenarios are discussed further below with the quantities, lines, and orders picked by the robots and order pickers (Figures ).
Figure 3. Performance outcomes in terms of daily cost, energy expenditure and error rate.
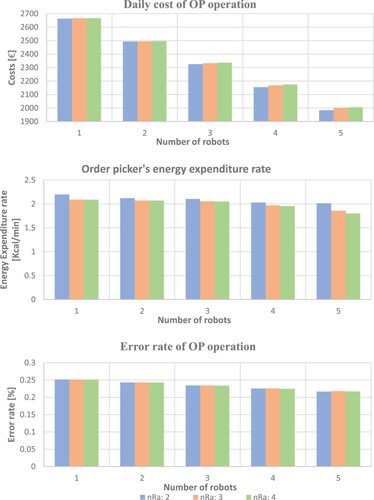
Figure 4. (a) Quantities (Qop, Qr), (b) lines (NLop, NLr) (c) orders (Zop, Zr) picked per worker (Nop, Nr).
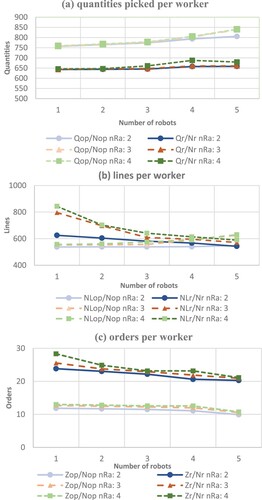
Figure 5. Performance outcomes for WH15 and LAY.
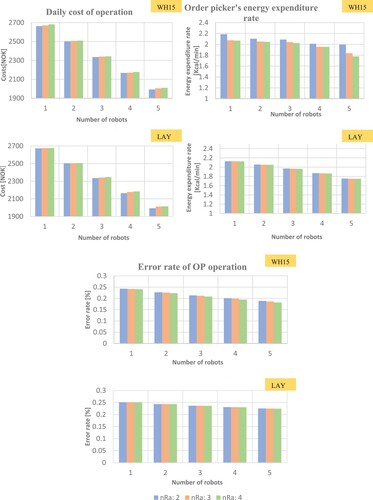
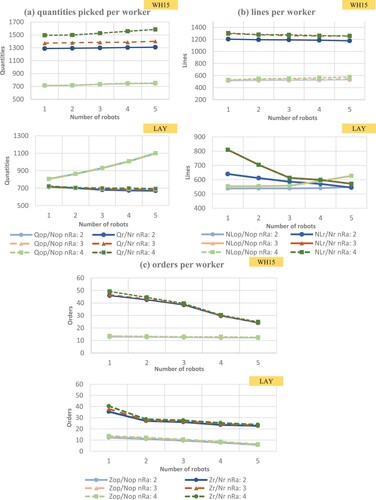
Figure 6. (a) Quantities (Qop, Qr), (b) lines (NLop, NLr) and (c) orders (Zop, Zr) picked per worker (Nop, Nr) for WH15 and LAY.
5.2. Performance outcomes
From the results, it is evident that the daily cost of operation decreases linearly with an increase in the number of robots with an average decrease rate of 6.96%. However, when increasing the number of robot aisles, the cost of daily operation increases slightly. The daily cost of operating the robot is less than having an order picker. On the other hand, the cost of operating a robot rises as the number of items picked by the robot increases. This results in a slight cost rise when extending the robot picking area with more aisles. Secondly, the order pickers’ energy expenditure rate decreases linearly with an increase in the number of robots, with an average reduction rate of 2.88%. However, increasing the robot aisles results in an exponential decrease in energy expenditure from 2 to 4 robot aisles. As a result, having more robots and fewer aisles for the order pickers decreases the order pickers’ energy expenditure rate. Finally, the total error rate of an OP operation decreases with an increase in the number of robots or robot aisles. Moreover, with an increase in the number of robots, there is an average decrease in the total error rate by 2.71%. Then again, with an increase in the number of robot aisles, the total error rate remains nearly constant. The results of the prime scenario are summarised in Table .
Table 5. Performance outcomes of the prime scenario.
5.3. Quantities, lines, and orders picked per worker
Considering the quantities picked per robot and order picker with an increasing number of robots, there has been a slight increase in the quantities picked by the robots with 0.864% and order pickers with 2.24%. While increasing the aisles for the robot zone, the quantities increase not only per robot but also per order picker. Secondly, the lines picked per robot decrease with an increase in the number of robots by an average rate of 6.57%. On the other hand, the lines picked per order picker increase by an average rate of 2.28%. Finally, with an increase in the number of robots, the orders picked per robot and order picker decrease. The average decrease rate for the robot and order picker is 5.28% and 4.35%, respectively. However, the orders picked per robot and order picker increase with an increase in the number of robot aisles.
6. Parametric analysis
To evaluate the model's novelty, the same set of scenarios are generated but this time modifying the work hours for the robot and also changing the warehouse layout. This is because the robots can work for more hours than humans without fatigue. Under the first case in this parametric analysis, the robot's work time has been set to 15 h, which is marked as WH15, as it is intriguing to consider a scenario in which the robot works constantly for 15 h. In the second case of parametric analysis, it is interesting to check whether changing the dimensions of the warehouse would have an impact on the operation, which is labelled as LAY. Consequently, the length of an aisle is changed from 28.5 m to 57 m, thereby having 120 pick locations per aisle, and the new performance will be investigated. The authors will thus be able to see how the general settings like quantities, lines, and orders picked per worker change in the different scenarios.
6.1. Performance outcomes
Initially, with an increase in the number of robots, the daily cost of operation decreases for WH15 and also for LAY. However, the greater cost is associated with WH15 rather than LAY. In the case of WH15, there is an average decrease rate of cost with 6.95%, while LAY has 6.93%. In both cases, the cost of daily operations shows a slight increase with an increase of robot aisles. However, in both cases, the trend is that as the number of robots increases whilst also increasing the robot aisles, the variation in the cost of daily operations also increases. As concerns the order pickers’ energy expenditure rate, with an increase in the number of robots, the energy expenditure rate decreases in both cases. The average rate of decrease for the WH15 and LAY is 2.40% and 4.75%, respectively. Also, with an increase in the number of robot aisles, the energy expenditure rate decreases slightly. However, when 5 robots are deployed while increasing the number of robot aisles as in the case of WH15, the energy expenditure rate drops dramatically. WH15 and LAY have lower energy expenditure rates compared to the prime scenario. Finally, as seen in the prime scenario, the total error rate of the daily operation decreases with an increase in the number of robots in the cases of both WH15 and LAY. The average decrease of error rates for WH15 and LAY is 6.37% and 3.59%, respectively. Also, with an increase in the number of robot aisles, there is a slight decrease in the total error rate. Compared with the prime scenario, the error rate for both WH15 and LAY is marginally lower (Table ).
Table 6. Performance outcomes for WH15 and LAY.
6.2. Quantities, lines, and orders picked per worker
In the case of the WH15, the quantities picked per robot and order picker increase with the number of robots. The average quantity increase rate for robots and order pickers is 0.77% and 1.18%, respectively. Alternatively, in the case of LAY, the quantities picked per order picker decrease and the quantities picked per robot increase. The average quantity decrease rate for the robot is 1.31% and the average increase rate for the order picker is 8.09%. In the event that the number of robot aisles is increased, there is an increase in the quantities picked by both the robot and the order picker. With an increase in the number of robots, the lines per robot decreased at an average rate of 0.74%, and the lines per order picker increased at an average rate of 1.35%. In the case of LAY, the lines per robot decrease with an average rate of 6.96%, and the order picker increases at an average rate of 2.28%. If the number of robot aisles is increased, there is an increase in lines picked for both the robot and the order picker. Finally, with an increase in the number of robots, the orders per robot and order picker decrease with an average rate of 14.95% and 1.82% respectively. In the case of LAY, the orders per robot and order picker decreased with an average rate of 10.97% and 17.26%.
7. Discussion
In this section, the authors discuss the trends of the results, while generating different scenarios from the preceding section. The prime scenario is covered first, followed by a review of the change in the robots’ work hours and, last, the warehouse layout.
In the prime scenario, as the number of robots and aisles in the robot zone increases, the quantities, lines, and orders selected per robot and order picker also increase because, with a greater number of robots, more items may be assigned to robots that are too heavy to handle for order pickers. Therefore, when increasing the number of robots, the daily cost of operations decreases because more robots and fewer order pickers are engaged in the warehouse. By this logic, assigning more quantities, lines, and orders to the robot increases the need for more robots, thereby decreasing the need for order pickers. Secondly, the energy expenditure per order picker decreases with an increase in the number of robots, which also decreases the number of order pickers’ aisles. As the number of robots increases, more heavy products can be assigned to the robot zone, thus lighter products are assigned to the order pickers’ zone. Also, with a decrease in the number of aisles for order pickers, less energy expenditure is required for each order picker to travel around the zone, thereby decreasing their energy expenditure with the increase in robot aisles. Third, despite adjusting the number of robots or aisles, the total error rate decreases slightly. The total error rate for robots decreases as the number of robots and aisles in the robot zone is increased, since more quantities are picked by the robots and the associated error rate is greater than the error rate of the robot.
When the robot's work hours are increased to 15 h, the quantities, lines, and orders picked by the robot nearly double. The quantities, lines, and orders collected by the order picker, on the other hand, show a minor drop as compared to when the robot works for 7 hrs. As concerns the daily cost of operation, a robot operating for 15 h has a slightly higher running cost in comparison with 7.5 h as more items are assigned to the robot zone. Following that, as the working hours of the robots are increased, the energy expenditure rate for the order pickers decreases. It is also interesting to notice how the energy expenditure of the order pickers decreases dramatically as the number of robots is increased from 4 to 5. This is due to the fact that the robots might work longer hours and be assigned heavy items while leaving lightweight items to order pickers. As a result, this situation may increase the operators’ well-being by lowering fatigue compared to the prior scenario. Finally, extending the work hours for the robots has an effect on the total error rate. The error rate decreases with both an increase in the number of robots and an increase in the number of robot aisles. Compared to the prime scenario, the error rate for the order pickers drops as they have fewer quantities to pick. This is because, compared with the prime scenario, more quantities are picked by the robots instead of the order pickers.
When the warehouse layout changes, the quantities, lines, and orders collected by the robots and order pickers increase slightly in comparison to the initial situation. This is due to the fact that the length of the aisle has increased, doubling the pick locations in each aisle, and allowing the robots and order pickers to pick more in each aisle. The daily cost of operation has also increased in comparison, as more items are picked by the robots within each aisle. Therefore, the order pickers’ energy expenditure rate is lowered in comparison, as it is observed that heavy items are selected by the robots, decreasing the energy expenditure for the pick task, and the energy expenditure for the travel task has also been reduced in comparison to the initial scenario. Finally, as in all other scenarios, the total error rate in this scenario also decreases. When compared to the prime scenario, the total error rate is lower because more quantities are collected by the robots than the order pickers.
It is interesting to see that increasing the number of robots decreases the daily cost of operation and also the energy expenditure rate of the order pickers. Both scenarios, i.e. changing robot work hours and changing the warehouse layout, increased the daily cost and decreased the energy expenditure of the order pickers compared with the prime scenario. Therefore, having PTRs in the OP system working in parallel with the order pickers in two different zones can increase the performance of the system. However, it is also worth noting that the daily cost of operations and the energy expenditure rate are inversely proportional. Interestingly, the total error rate of the daily operation decreases in all the tested scenarios. Therefore, it is important to note that having more robots and a bigger zone size for the robots means that the total error rate of the operation could be lower.
7.1. Practical implications
From the study, it is clear that having both PTRs and order pickers in separate zones with dedicated storage could improve the performance outcomes of an order picking system. Also, from the above discussion, it is clear that PTRs picking heavy products could reduce the workload on the order pickers. Subsequently, managers could decide on the number of robots they require to reduce the operating cost of the OP process based on the layout of the warehouse and the quantities that need to be picked by the robots. This was also seen in the study by D’Souza, Costa, and Pires (Citation2020), who investigated the design of a PTR for an OP system. On the other hand, managers could even improve the well-being of their operators through the reduced physical load. Some authors (Papcun et al. Citation2019; Rey et al. Citation2019) comment that reducing the physical load on the order pickers could increase safety and improves the economic results. Zhang, Winkelhaus, and Grosse (Citation2021) also commented that order pickers working in close collaboration with a PTR have less physical load. However, this study considers how reducing the workload on order pickers by minimising the weight of the quantities picked by them can increase economic performance and lower the error rate.
Also, there are costs associated with making errors (Fager, Sgarbossa, and Calzavara Citation2021). According to Winkelhaus et al. (Citation2022), a hybrid order picking system that includes both robots and order pickers can increase throughput while also lowering operational costs when compared to only order pickers. From the above section, it is clear that increasing the number of robots could also reduce the total error rate, so managers could also reduce the total operating cost. Setayesh et al. (Citation2021) mentioned that poor interaction between the order pickers and the OP system could increase the error in picking because the demands on the order pickers exceed their capacity. Therefore, it is very important for managers to understand the capacity of their order pickers to make decisions regarding the implementation of new technologies in order to improve the performance of the OP system. In this study, the managers could decide on the number of robots required in the warehouse and the zone size to see how the physical workload on the order pickers would vary. Finally, with a human-centric approach the managers could make better decisions on introducing new technologies to an existing OP system.
7.2. Methodological limitations
The paper uses a mathematical modelling approach to address the problem. Mathematical modelling is the process of mathematically characterising a non-mathematical scenario, phenomenon, and interactions between circumstances, as well as discovering mathematical patterns. However, for these mathematical patterns, there is a need for many assumptions and constraints that should be considered to practically develop the mathematical model. Therefore, there are actual shifts from the real-life scenario. In this paper, a general mathematical model is provided so that users can use it based on their specific layout settings. The downside is that different users will need to adopt more scenarios into the equations based on their own requirements in order to get a more feasible solution. Also, in this paper, we have considered a situation of dividing the space into separate zones for the robots and order pickers, but there could be other situations where both robots and order pickers are working together in one zone. Finally, in this study only the OP design characteristics for the particular case company have been explored.
7.3. Contribution to industry 5.0
Industry 5.0 is heavily grounded in and benefits from Industry 4.0′s technological accomplishments. The role of humans in the technological transition is primarily focused on ensuring long-term economic, environmental, and societal progress. In order to incorporate human-centricity, resilience, and sustainability into smart logistics, the technology matching must be rethought and reconsidered. According to Romero and Stahre (Citation2021), technology development should focus on two primary areas: self-resilience and system resilience. Self-resilience stresses human sustainability from biological, physical, cognitive, and psychosocial aspects, as well as human-centricity in the technology transition, such as work ethics, social repercussions, legal concerns, and so on. System resilience, on the other hand, denotes functional collaboration between people and robots in terms of control sharing and trading. Cobots are one of the most researched Industry 5.0 technologies in smart logistics, and it is critical to study cobots in order to understand the interplay between humans and technologies throughout the transition (Jafari, Azarian, and Yu Citation2022). The goal of the transition is to prevent disruption in human-machine systems; both human and machine agents should strive to avoid unwanted occurrences and safeguard the human-machine system as a result of such events (Romero and Stahre Citation2021). As a result, the contribution of this paper coincides with the shift from Industry 4.0 to Industry 5.0, as we study how robots may be deployed in their zones in the warehouse and see how that could improve the performance and health of the order pickers.
7.4. Research opportunities
As mentioned, this work addresses a general mathematical model that may be used in a variety of situations in a hybrid order picking system with robots and order pickers. The resulting research opportunities are discussed further below.
System layout: This study only considers aisles on one side. However, in the future, a cross-aisle study might be done to examine how the performance differs. Furthermore, while this study focused on single-level picking, multi-level picking might be investigated in the future.
Methodology: The physical workload on the order pickers might be calculated by biomechanical modelling utilising motion capture data from the case company as the next step in this article, making the results more nuanced. Also, Winkelhaus et al. (Citation2022) state that most systems are simulated or mathematically modelled under restrictive assumptions and limitations, and experimental applications are rare. Therefore, the authors suggest conducting empirical studies to validate the results from the existing mathematical and simulation models.
Scenarios and operational data: This research takes an initial step to assess the problem with PTRs. For future research, this study should be extended by exploring different scenarios including additional policies in an OP system's design characteristics, for example, investigating additional layout solutions, storage assignment policies, order batching policies, zoning policies, and routing policies. Also, the model has not considered the intervention rate for the robot. The intervention rate describes the rate at which the order picker intervenes with the robot when it fails, examining the robot's reliability since, in a real-world setting, the robot may become stalled and require the assistance of an order picker to restart. Since this paper is concerned with changing the number of workers and the zone size, a paper expansion may investigate the blocking impact between the workers. Finally, the model might be improved by taking the charging of the robot battery into account, as the robot battery depletes with usage and requires periodic recharging. Finally, changes in the robot speed might be investigated since this affects the performance outcomes of an OP system. For example, if the robot has a longer pick time, the lead time may increase as the fraction of picks made by the robot increases. Also, future research could consider the comparison of a hybrid system with fully automated systems.
Human factors: This study has only focused on evaluating the physical aspects of the order pickers by evaluating their energy expenditure rate. However, it is equally important to check how other HF aspects such as perceptual/cognitive, and psychosocial, have an impact on a hybrid order picking system. The perceptual aspects make an important contribution in pursuing the right item to pick from the storage location. Thus, the co-appearance of items has a greater impact on the error rate. Also, the psychosocial aspects have a great impact on worker satisfaction (Winkelhaus, Grosse, and Morana Citation2021). Therefore, future research could evaluate the impact of a hybrid order picking system on the psychosocial aspects of the order pickers.
Lifespan of robot: The future research should also consider the lifespan of robots. This would involve analysing various aspects such as the possibility of breakdowns or malfunctions, or when a particular robot may become obsolete due to advancements in technology.
Additionally, the significance of comparing the anticipated lifespan of robots to that of humans must be highlighted, particularly in cases where the robot's operational time is doubled. Such an evaluation would enable the determination of the efficacy and feasibility of employing robots for specific tasks over an extended period.
8. Conclusion
This paper introduces the operation of a new solution in a picker to parts OP system, i.e. a pick and transport robot, starting with a review of the state-of-the-art studies conducted on PTRs. Thereafter, issues concerning the operation of PTRs in a picker to parts OP system were examined. Finally, as a contribution towards knowledge, a mathematical model was developed to address these issues. The feasibility of the mathematical model was tested by applying the model to a real-life case company.
Since a transition is underway from Industry 4.0 to 5.0, with a more human-centric approach, this paper speaks about how the new solution could enhance the performance of order pickers, rather than replacing them in the system. It was intriguing to see how assigning heavier jobs to the robot improves the productivity of the OP system, and also improves the well-being of the order pickers and reduces the total error rate. According to the results, increasing the number of robots reduces the daily cost of operation as well as the energy expenditure rate of the order pickers.
Data availability statement
The data that support the findings of this study are available from the corresponding author upon reasonable request.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Notes on contributors
Vivek Vijayakumar
Vivek Vijayakumar is a Ph.D. candidate at the Department of Mechanical and Industrial Engineering (MTP) at NTNU (Norway). He has a master's degree in production development and management from Jönköping University. His research interests include warehousing, supply chain management, human factors engineering, and material handling.

Ahmad Sobhani
Ahmad Sobhani is an Assistant Professor of Decision & Information Sciences at Oakland University's School of Business. His research focuses on the application of operations research techniques and advanced data analytics to problems in human factors modelling, manufacturing, healthcare systems, and supply chain management.
References
- Azadeh, K., R. De Koster, and D. Roy. 2019. “Robotized and Automated Warehouse Systems: Review and Recent Developments.” Transportation Science 53 (4): 917–945. https://doi.org/10.1287/trsc.2018.0873
- Battini, D., M. Calzavara, A. Persona, F. Sgarbossa, and V. Visentin. 2017. “Fatigue and Recovery: Research Opportunities in Order Picking Systems.” IFAC-PapersOnLine 50 (1): 6882–6887. https://doi.org/10.1016/j.ifacol.2017.08.1211
- Bonini, M., A. Urru, and W. Echelmeyer. 2016. “Fast Deployable Autonomous Systems for Order Picking: How Small and Medium Size Enterprises Can Benefit from the Automation of the Picking Process. In ICINCO 2016: Proceedings of the 13th International Conference on Informatics in Control, Automation and Robotics, July 29–31, Lisbon, Portugal. – Vol. 2 (pp. 479–484). SCITEPRESS.
- Boysen, N., R. De Koster, and F. Weidinger. 2019. “Warehousing in the e-Commerce era: A Survey.” European Journal of Operational Research 277 (2): 396–411. https://doi.org/10.1016/j.ejor.2018.08.023
- Breque, M., L. De Nu, and A. Petridis. 2021. Industry 5.0: Towards a Sustainable, Human-Centric and Resilient European Industry. Luxembourg: European Commission, Directorate-General for Research and Innovation.
- Caputo, A. C., and P. M. Pelagagge. 2006. “Management Criteria of Automated Order Picking Systems in High-Rotation High-Volume Distribution Centers.” Industrial Management & Data Systems 106(9): 1359–1383. https://doi.org/10.1108/02635570610712627.
- Caron, F., G. Marchet, and A. Perego. 1998. “Routing Policies and COI-based Storage Policies in Picker-to-part Systems.” International Journal of Production Research 36 (3): 713–732. http://doi.org/10.1080/002075498193651.
- Chui, M., J. Manyika, and M. Miremadi. 2016. “Where Machines Could Replace Humans – and Where They Can’t (yet).1–12.
- D’Avella, S., and P. Tripicchio. 2020. “Supervised Stowing as Enabling Technology for the Integration of Impaired Operators in the Industry.” Procedia Manufacturing 51: 171–178. https://doi.org/10.1016/j.promfg.2020.10.025
- De Lombaert, T., K. Braekers, R. De Koster, and K. Ramaekers. 2022. “In Pursuit of Humanised Order Picking Planning: Methodological Review, Literature Classification and Input from Practice.” International Journal of Production Research 61 (10): 3300–3330. https://doi.org/10.1080/00207543.2022.2079437.
- D’Souza, F., J. Costa, and J. N. Pires. 2020. “Development of a Solution for Adding a Collaborative Robot to an Industrial AGV.” Industrial Robot: The International Journal of Robotics Research and Application 47 (5): 723–735. https://doi.org/10.1108/IR-01-2020-0004.
- Fager, P., F. Sgarbossa, and M. Calzavara. 2021. “Cost Modelling of Onboard Cobot-Supported Item Sorting in a Picking System.” International Journal of Production Research 59 (11): 3269–3284. https://doi.org/10.1080/00207543.2020.1854484
- Falkenberg, S. F., and S. Spinler. 2022. “Integrating Operational and Human Factors to Predict Daily Productivity of Warehouse Employees Using Extreme Gradient Boosting.” International Journal of Production Research, 1–20. https://doi.org/10.1080/00207543.2022.2159563
- Fragapane, G., R. De Koster, F. Sgarbossa, and J. O. Strandhagen. 2021. “Planning and Control of Autonomous Mobile Robots for Intralogistics: Literature Review and Research Agenda.” European Journal of Operational Research 294 (2): 405–426. https://doi.org/10.1016/j.ejor.2021.01.019
- Garg, A., D. B. Chaffin, and G. D. Herrin. 1978. “Prediction of metabolic rates for manual materials handling jobs.” American Industrial Hygiene Association Journal 39 (8): 661–674. http://doi.org/10.1080/0002889778507831.
- Gawron, V. J., J. French, and D. Funke. 2001. “Stress, Workload, and Fatigue.” An Overview of Fatigue, 581–595.
- Grosse, E. H. 2023. “Application of Supportive and Substitutive Technologies in Manual Warehouse Order Picking: A Content Analysis.” International Journal of Production Research, 1–20. https://doi.org/10.1080/00207543.2023.2169383
- Grosse, E. H., C. H. Glock, M. Y. Jaber, and W. P. Neumann. 2015. “Incorporating Human Factors in Order Picking Planning Models: Framework and Research Opportunities.” International Journal of Production Research 53 (3): 965–717. https://doi.org/10.1080/00207543.2014.919424
- Grosse, Eric H., Christoph H. Glock, and W. Patrick Neumann. 2016. “Human Factors in Order Picking: a Content Analysis of the Literature.” International Journal of Production Research 55 (5): 1260–1276. http://doi.org/10.1080/00207543.2016.1186296.
- Jafari, N., M. Azarian, and H. Yu. 2022. “Moving from Industry 4.0 to Industry 5.0: What Are the Implications for Smart Logistics?” Logistics 6 (2): 26. https://doi.org/10.3390/logistics6020026
- Kauke, D., F. Sailer, and J. Fottner. 2022. “Mobile Picking Robots: A First Study of the Effects of Human-Robot Interactions in Conventional Order Picking Systems.” In EAI MMS 2020 – 5th EAI International Conference on Management of Manufacturing Systems, 319–332. Cham: Springer.
- Kimura, N., K. Ito, T. Fuji, K. Fujimoto, K. Esaki, F. Beniyama, and T. Moriya. 2015. “Mobile Dual-arm Robot for Automated Order Picking System in Warehouse Containing Various Kinds of Products.” In 2015 IEEE/SICE International Symposium on System Integration (SII), 332–338. IEEE.
- Kolus, A., R. Wells, and P. Neumann. 2018. “Production Quality and Human Factors Engineering: A Systematic Review and Theoretical Framework.” Applied Ergonomics 73: 55–89. https://doi.org/10.1016/j.apergo.2018.05.010
- Lee, Hung-Yu, and Chase C. Murray. 2018. “Robotics in Order Picking: Evaluating Warehouse Layouts for Pick, Place, and Transport Vehicle Routing Systems.” International Journal of Production Research 57 (18): 5821–5841. http://doi.org/10.1080/00207543.2018.1552031.
- Lee, J. D., and B. D. Seppelt. 2009. “Human Factors in Automation Design.” In Springer Handbook of Automation, 417–436. Berlin: Springer. https://doi.org/10.1007/978-3-540-78831-7_25.
- Lorson, F., A. Fügener, and A. Hübner. 2022. “New Team Mates in the Warehouse: Human Interactions with Automated and Robotized Systems.” IISE Transactions 55 (5): 1–41. https://doi.org/10.1080/24725854.2022.2072545.
- Marchet, G., M. Melacini, and S. Perotti. 2015. “Investigating Order Picking System Adoption: A Case-Study-Based Approach.” International Journal of Logistics Research and Applications 18 (1): 82–98. https://doi.org/10.1080/13675567.2014.945400
- Neumann, W. P., and J. Dul. 2010. “Human Factors: Spanning the gap Between OM and HRM.” International Journal of Operations & Production Management 30 (9): 923–950. https://doi.org/10.1108/01443571011075056
- Neumann, W. P., S. Kihlberg, P. Medbo, S. E. Mathiassen, and J. Winkel. 2002. “A Case Study Evaluating the Ergonomic and Productivity Impacts of Partial Automation Strategies in the Electronics Industry.” International Journal of Production Research 40 (16): 4059–4075. https://doi.org/10.1080/00207540210148862
- Neumann, W. P., S. Winkelhaus, E. H. Grosse, and C. H. Glock. 2021. “Industry 4.0 and the Human Factor–A Systems Framework and Analysis Methodology for Successful Development.” International Journal of Production Economics 233: 107992. https://doi.org/10.1016/j.ijpe.2020.107992
- Panagou, S., W. P. Neumann, and F. Fruggiero. 2023. “A Scoping Review of Human Robot Interaction Research Towards Industry 5.0 Human-Centric Workplaces.” International Journal of Production Research, 1–17. https://doi.org/10.1080/00207543.2023.2172473
- Papcun, P., J. Cabadaj, E. Kajati, D. Romero, L. Landryova, J. Vascak, and I. Zolotova. 2019. “Augmented Reality for Humans-Robots Interaction in Dynamic Slotting “Chaotic Storage” Smart Warehouses.” In IFIP International Conference on Advances in Production Management Systems, 633–641. Cham: Springer. https://doi.org/10.1007/978-3-030-30000-5_77.
- Rey, R., M. Corzetto, J. A. Cobano, L. Merino, and F. Caballero. 2019. “ Human-Robot Co-working System for Warehouse Automation.” In 2019 24th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), 578–585. IEEE.
- Romero, D., and J. Stahre. 2021. “Towards the Resilient Operator 5.0: The Future of Work in Smart Resilient Manufacturing Systems.” Procedia CIRP 104: 1089–1094. https://doi.org/10.1016/j.procir.2021.11.183
- Setayesh, A., E. H. Grosse, C. H. Glock, and W. P. Neumann. 2021. “Determining the Source of Human-System Errors in Manual Order Picking with Respect to Human Factors.” International Journal of Production Research 60 (20): 6350–6372. https://doi.org/10.1080/00207543.2021.1991022
- Sgarbossa, F., E. H. Grosse, W. P. Neumann, D. Battini, and C. H. Glock. 2020a. “Human Factors in Production and Logistics Systems of the Future.” Annual Reviews in Control 49: 295–305. https://doi.org/10.1016/j.arcontrol.2020.04.007
- Sgarbossa, F., A. Romsdal, F. H. Johannson, and T. Krogen. 2020b. “Robot Picker Solution in Order Picking Systems: An Ergo-Zoning Approach.” IFAC-PapersOnLine 53 (2): 10597–10602. https://doi.org/10.1016/j.ifacol.2020.12.2813
- Sobhani, A., M. I. M. Wahab, and W. P. Neumann. 2017. “Incorporating Human Factors-Related Performance Variation in Optimizing a Serial System.” European Journal of Operational Research 257 (1): 69–83. http://doi.org/10.1016/j.ejor.2016.06.057.
- Tian, S., Y. Chen, Q. Gu, R. Hu, R. Li, and D. He. 2020. “Optimal Path Planning for a Robot Shelf Picking System.” In 2020 39th Chinese Control Conference (CCC), 3898–3903. IEEE. https://doi.org/10.23919/CCC50068.2020.9189590.
- Tompkins, James A., John A. White, Yavuz A. Bozer, and J. M. A. Tanchoco. 2010. Facilities Planning. John Wiley & Sons Inc. ISBN: 9780470444047.
- Vanheusden, S., T. van Gils, K. Ramaekers, T. Cornelissens, and A. Caris. 2022. “Practical Factors in Order Picking Planning: State-of-the-art Classification and Review.” International Journal of Production Research 61 (6): 2032–2056. https://doi.org/10.1080/00207543.2022.2053223.
- Vidovič, E., and B. Gajšek. 2020. “Analysing Picking Errors in Vision Picking Systems.” Logistics & Sustainable Transport 11 (1): 90–100. https://doi.org/10.2478/jlst-2020-0006
- Vijayakumar, V., and F. Sgarbossa. 2021. “A Literature Review on the Level of Automation in Picker-to-Parts Order Picking System: Research Opportunities.” IFAC-PapersOnLine 54 (1): 438–443. https://doi.org/10.1016/j.ifacol.2021.08.050
- Weisenboehler, M., and C. Wurll. 2020. “Automated Item Picking for Fashion Articles Using Deep Learning.” In ISR 2020; 52nd International Symposium on Robotics, 1–8. https://doi.org/10.1080/00207543.2022.2053223.
- Winkelhaus, S., E. H. Grosse, and S. Morana. 2021. “Towards a Conceptualisation of Order Picking 4.0.” Computers & Industrial Engineering 159: 107511. https://doi.org/10.1016/j.cie.2021.107511
- Winkelhaus, S., M. Zhang, E. H. Grosse, and C. H. Glock. 2022. “Hybrid Order Picking: A Simulation Model of a Joint Manual and Autonomous Order Picking System.” Computers & Industrial Engineering 167: 107981. https://doi.org/10.1016/j.cie.2022.107981
- Yung, M., A. Kolus, R. Wells, and W. P. Neumann. 2020. “Examinig the Fatigue-Quality Relationship in Manufacturing.” Applied Ergonomics 82: 102919. https://doi.org/10.1016/j.apergo.2019.102919
- Zhang, M., S. Winkelhaus, and E. H. Grosse. 2021. “Evaluation of Human Workload in a Hybrid Order Picking System.” IFAC-PapersOnLine 54 (1): 458–463. https://doi.org/10.1016/j.ifacol.2021.08.053
- Zou, Y., D. Zhang, and M. Qi. 2019. “Order Picking System Optimization Based on Picker-Robot Collaboration.” In Proceedings of the 2019 5th International Conference on Industrial and Business Engineering, 1–6. https://doi.org/10.1145/3364335.3364386.