
 ?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
In recent years, the communication-protocol-based synthesis and analysis issues have gained substantial research interest owing mainly to their significance in networked systems. In this work, we survey the control and filtering problems of networked systems under the effects induced by communication protocols. First, we introduce the engineering background of networked systems as well as the theoretical frameworks established to deal with the communication-protocol-based analysis and synthesis problems. Then, recent advances (especially the latest results) are reviewed on the stability analysis issue subject to protocol scheduling. Subsequently, the particular effort is devoted to presenting the latest progress on various communication-protocol-based control and filtering problems according to the characteristics of networked systems (e.g. time-varying nature, random behaviours, types of parameter uncertainties, and kinds of distributed structure). After that, we provide a systematic review of the communication-protocol-based fault diagnosis problems. Finally, some research challenges of communication-protocol-based control and filtering problems are outlined for future research.
1. Introduction
1.1. Engineering background
The research on networked systems (NSs) has attracted a vast amount of interest in the past several decades (Heemels et al., Citation2013). The most typical characteristic of NSs is the utilisation of network-based communication technology, under which the data exchange among different system components (e.g. controllers, sensors, filters, and actuators) is implemented via the shared communication network. Different from the traditional point-to-point communication technology, such network-based communication technology possesses numerous advantages (e.g. simple installation, reduced hardwire, low cost, and high reliability; Peng & Yang, Citation2013). Accordingly, NSs have achieved successful applications in an extensive range of fields such as smart vehicles, smart grids, environmental monitoring, industrial automation and intelligent transportation. By now, NSs have become the focus of intensive research in signal processing and control communities. A typical NS is shown in Figure , where the signal transmission between the controller and plant is implemented through two communication channels: the sensor-to-controller (S/C) channel and the controller-to-actuator (C/A) channel. Nevertheless, the utilisation of network-based communication would also give rise to certain special phenomena that might degrade the system performance. Such network-induced phenomena include, but are not limited to, transmission delays (T. Li et al., Citation2019; Peng & Han, Citation2016; Y.-W. Wang et al., Citation2018), packet dropouts (B. Chen, Zhang, et al., Citation2014; Han et al., Citation2016; Lu et al., Citation2017), data packet disorder (Lian et al., Citation2019; A. Liu et al., Citation2015; F. Zhang et al., Citation2018), signal quantisation (Ren & Xiong, Citation2020; H. Shen, Men, et al., Citation2019; F. Wang et al., Citation2019), communication protocol scheduling (K. Liu et al., Citation2012; J. Song, Wang, et al., Citation2019; Zou, Wang, Hu, et al., Citation2017), and channel fading effects (Guo & Wang, Citation2015; B. Hu et al., Citation2019). As such, the synthesis and analysis issues of NSs subject to various network-induced phenomena have attracted an ever-increasing research interest, see e.g. Dimarogonas et al. (Citation2012), Ge et al. (Citation2017), Tabuada (Citation2007), L. Zhang et al. (Citation2013), L. Zhang et al. (Citation2005), X.-M. Zhang et al. (Citation2016) and X.-M. Zhang et al. (Citation2017) and the references therein. For instance, in F. Wang et al. (Citation2018), the finite-time tracking control problem has been investigated for a type of NSs with quantised inputs. The distributed and centralised estimation issues have been studied in Caballero-Águila et al. (Citation2014) for NSs with missing measurements.
Figure 1. A typical NS with two communication networks.
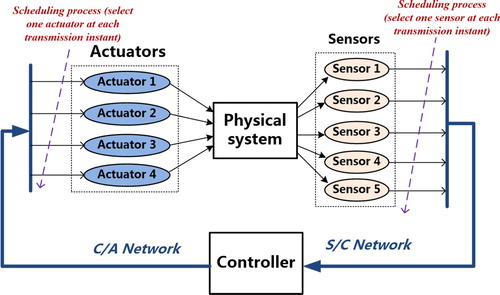
Among various network-induced phenomena, communication protocol scheduling is one of the most typical phenomena and would lead to a particularly significant impact on the performance of NSs. Such a phenomenon is mainly caused by the limited communication capability of the underlying channel in the NS. More specifically, in a typical network-based communication process, data transmissions would unavoidably suffer from data collisions in case of simultaneous multiple accesses to the shared communication network. In order to prevent such data collisions from occurring, an effective way is to restrain the network accesses according to the so-called communication protocols by guaranteeing that only one network node is permitted to transmit its data at each transmission instant through the shared communication channel (Dačić & Nešić, Citation2007). Communication protocols are capable of orchestrating the transmission order of all the network nodes and thereby generating certain scheduling behaviours that inevitably complicate the analysis and synthesis issues of NSs. By now, there are three kinds of extensively investigated communication protocols in the literature, e.g. the Try-Once-Discard (TOD) protocol (Zou, Wang, Han, et al., Citation2017), the Round-Robin (RR) protocol (K. Liu et al., Citation2012), and the Random-Access (RA) protocol (Guo & Wang, Citation2015).
1.2. Theoretical frameworks
In NSs, communication protocols are in fact a type of agreements with the aim to regulate the signal transmissions over shared channels. Accordingly, communication protocols would have a dramatic effect on the dynamical behaviours of NSs. So far, the analysis and synthesis issues subject to different communication protocols have attracted an ever-increasing research interest. It is worth mentioning that the dynamical behaviours of NSs subject to communication protocols are mainly affected by two aspects: the scheduling behaviours of communication protocols and the signal compensation methods. The former one determines which network node is selected to transmit its data at each transmission instant, while the later one prescribes how to compensate the data corresponding to the network nodes that have not been selected to transmit data. Nevertheless, the so-called protocol-induced effects can be regarded as the impacts of the corresponding scheduling behaviour and the signal compensation method on the NS. Generally, there are two signal compensation methods widely adopted in practical applications: the zero-order holder (ZOH) method (Sun et al., Citation2011) and the zero-input (ZI) method (Schenato, Citation2009).
Let us briefly introduce the protocol-induced effects by a simple example. Consider a discrete-time NS with N network nodes labelled as . Let
denote the chosen node which is allowed to get access to the communication channel at time instant k,
be the signal of the ith node before transmitted at time instant k, and
be the signal of the ith node after transmitted at time instant k. Then, the communication subject to certain communication protocol can be described by the following transmission model:
(1)
(1) where
and
is a Kronecker delta function (i.e.
holds if
and
otherwise). In this model, the scheduling behaviour of the underlying communication protocol is characterised by the time-varying variable
. The main research topic of NSs subject to communication protocols is to analysis the effects of the transmission model (Equation1
(1)
(1) ) on system performances and to design the corresponding controllers, filters, or fault estimators according to the system dynamics and the transmission model (Equation1
(1)
(1) ), i.e. the analysis and synthesis problems of NSs under the transmission model (Equation1
(1)
(1) ).
To date, there are main three different theoretical frameworks available in the literature dealing with the analysis and synthesis problems of NSs subject to various communication protocols, namely, switched-system-based (SWB) framework (Donkers et al., Citation2011), impulsive-hybrid-system-based (IHSB) framework (Tabbara & Nešić, Citation2008), and switched-time-delay-based (STDB) framework (K. Liu et al., Citation2012). Generally speaking, the SWB framework is always adopted to settle the discrete-time systems subject to communication protocols. Let us take the control problem of discrete-time NS with certain communication protocol for example. Consider a discrete-time NS with N sensor nodes. is the selected sensor node obtaining access to the communication network at time instant k. The NS is characterised as follows:
(2)
(2) where
,
,
,
and
are the system state, measurement output, control input, process noise and measurement noise at time instant k, respectively.
and
are two real-valued functions. Under the effects of communication protocol, the transmission model can be described by (Equation1
(1)
(1) ). Then, letting the control input be
, the dynamics of the closed-loop system can be described by the following difference equation:
(3)
(3) Obviously, the closed-loop system (Equation3
(3)
(3) ) can be regarded as a switched system and the switching law is determined by
which represents the scheduling behaviour of the underlying communication protocol. As such, the performance analysis and controller design issues of such a NS can be implemented based on the SWB framework. More details regarding the SWB framework can be found in Bauer et al. (Citation2013) and Donkers et al. (Citation2011).
The IHSB framework is always employed to handle the continuous-time systems with sampled measurements and communication protocol scheduling effects. For such kind of systems, the corresponding transmission model can be described by an impulsive system. Then, the resulted system dynamics could be represented by an impulsive switched system in which the system state would switch its value at every sampling instant. One of the representative works of IHSB framework can be found in Heemels et al. (Citation2010). Both the SWB framework and IHSB framework are capable of dealing with NSs subject to three widely studied communication protocols (i.e. the RR protocol, TOD protocol and RA protocol). Compared with such two frameworks, the STDB framework is developed to cope with the analysis and synthesis issues of NSs with protocol scheduling and communication delays (or the delay effects induced by the sampling mechanism). In the STDB framework, the transmission model under the protocol scheduling is described by a delayed measurement model with switching parameters. Based on such a transmission model, the resulted system dynamics could be modelled by a switched time-delay system. More details regarding the STDB framework can be found in K. Liu et al. (Citation2012). So far, a rich body of literature has appeared on the analysis and synthesis issues subject to various communication protocols based on these aforementioned frameworks, see e.g. Donkers et al. (Citation2012), Heemels et al. (Citation2010), Ju et al. (Citation2019), K. Liu et al. (Citation2018), Long and Yang (Citation2014) and Zou, Wang, Hu, et al. (Citation2017). The relevant research on NSs subject to communication protocols have mainly focused attention on (1) the stability analysis of NSs subject to various communication protocols, (2) the communication-protocol-based control problem of NSs, (3) the communication-protocol-based filtering (or state estimation) problem of NSs, and (4) the communication-protocol-based fault diagnosis problem of NSs.
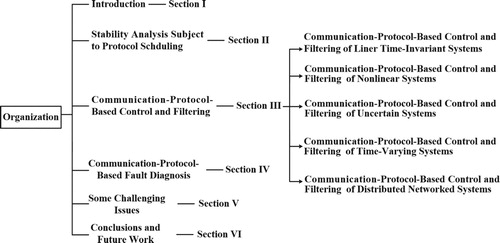
In this survey, we aim to provide a thorough and timely review of existing research works on recent contributions to the analysis and synthesis issues of NSs subject to communication protocols. This paper is the first deep overview of recent progress in the study of communication-protocol-based analysis and synthesis problems, additionally discussing some vital future challenges which might contribute to the meaningful progress of novel results. The rest of this work is organised as follows. In Section 2, we firstly review the recent advances on the stability analysis issue subject to communication protocol scheduling effects. In Sections 3 and 4, the communication-protocol-based control problem, communication-protocol-based filtering problem and communication-protocol-based fault diagnosis problem are reviewed for different NSs, respectively. Section 5 discusses some challenging works of communication-protocol-based analysis and synthesis issues of NSs. Conclusions and future topics of research are presented in Section 6. The organisation of this survey could be summarised by Figure .
Figure 2. Organisation of this survey.
2. Stability analysis subject to protocol scheduling
The performance analysis issue has gained a lot of research attention for NSs subject to protocol scheduling effects since the pioneering works (Walsh & Ye, Citation2001; Walsh et al., Citation2002; W. Zhang et al., Citation2001). Stability is one of the mostly investigated performance indices of dynamical systems. The scheduling effects of communication protocols would lead to an enormous impact on the stability of NSs (Dačić & Nešić, Citation2007). In Walsh et al. (Citation2002), the stability analysis issue has been studied for continuous-time linear time-invariant (LTI) systems subject to the effects of RR protocol and TOD protocol, respectively. Furthermore, a maximum allowable transfer interval (MATI) has been proposed to guarantee the global exponential stability (GES) of a NS subject to the TOD protocol. In Carnevale et al. (Citation2011), an improved MATI has been obtained to guarantee the GES compared with (Walsh et al., Citation2002) based on the hybrid-system-based method. The input-output stability issue has been investigated in Nešić and Teel (Citation2004) for continuous-time nonlinear systems subject to RR protocol and TOD protocol, respectively. The results have been extended to the continuous-time nonlinear systems subject to hybrid communication protocols in Tabbara et al. (Citation2007). Based on the IHSB framework, the
stability problem has been addressed in Heemels et al. (Citation2010) for continuous-time NSs with communication protocol scheduling, time-varying transmission intervals and communication delays, where the trade-offs between the MATI, maximally allowable delay (MAD) and performance gains have been provided.
The study on NSs with RA protocol has been first reported in Tabbara and Nešić (Citation2008), where sufficient conditions have been acquired to guarantee the stability for continuous-time NSs. For discrete-time NSs, the mean-square stability has been analysed based on the SWB framework in Donkers et al. (Citation2012) with RR, TOD and RA protocols, respectively. Generally speaking, there are two different stochastic processes describing the scheduling behaviour of the RA protocol. The first one is the independent and identically distributed (i.i.d) sequence of random variables, which has been first introduced in Tabbara and Nešić (Citation2008). The other one is the discrete-time Markov chain, which has been first adopted in Donkers et al. (Citation2012). The choice between such two stochastic processes is dependent on the actual communication channel. In K. Liu, Fridman, and Johansson (Citation2015), the authors have studied the exponential mean-square stability of NSs subject to two different RA scheduling models (i.e. the i.i.d sequence of random variables and the discrete-time Markov chain) respectively based on the IHSB framework. In L. Zhou and Wei (Citation2015), the
stability issue has been addressed for nonlinear NSs with TOD protocol scheduling by using the small gain theorem.
The exponential mean-square stability analysis issue has been considered for NSs with two kinds of RR protocols in Xu et al. (Citation2013), where two Markov chains have been employed to model the packet dropouts. In K. Liu et al. (Citation2011), the stability problem has been investigated based on the STDB framework for discrete-time NSs with RR scheduling, constant communication delays and the nonuniform sampling scheme. The authors have extended the results in K. Liu et al. (Citation2012), where the exponential stability has been considered for NSs with time-varying communication delays and RR scheduling. Then, the authors have discussed the stability issues subject to TOD protocol scheduling effects for continuous-time NSs and discrete-time NSs in K. Liu, Fridman, and Hetel (Citation2015) and K. Liu et al. (Citation2018), respectively, where the corresponding stability criteria have been derived by using the hybrid-delayed-system-based approach. In Antunes et al. (Citation2015), the mean-square stability has been discussed based on the STDB framework for a class of stochastic NSs with protocol scheduling effects, where it has been shown the TOD protocol would lead to a larger MATI compared with the RR protocol. It should be noted that the TOD protocol is designed based on the ‘competitive’ principle. As such, it is sometimes difficult for certain network nodes to obtain sufficient opportunities getting access to the communication channel. In this case, some ‘improved’ TOD protocols have been developed to ensure that every node is eventually assigned with the network access opportunity within a finite window of time. In Tabbara et al. (Citation2007), a so-called constant-penalty TOD (CP-TOD) communication protocol has been introduced based on the mechanism of ‘ silent time’ and the stability of the NS subject to the CP-TOD scheduling has been studied. The input-to-state stability in probability has been studied in B. Li et al. (Citation2019) for nonlinear stochastic systems under quantisation effects and communication protocols in virtue of the switched Lyapunov function method.
3. Communication-protocol-based control and filtering
The control and filtering problems are two fundamental research topics in industrial automation community. In order to evaluate the control and filtering performance, various control and filtering methods have been developed. These control and filtering schemes can be categorised into several groups according to the considered systems and noises as shown in Table .
Table 1. The control and filtering methods for different systems with different noises.
As discussed in Section 2, the closed-loop system dynamics of a NS is largely dependent on the protocol-induced effects. As such, the controller/filter design of a NS should take the protocol-induced effects into consideration in order to achieve the desired performance. In this section, we would like to review the communication-protocol-based control and filtering problems for different systems.
3.1. Communication-protocol-based control and filtering of linear time-invariant systems
The control problem of linear time-invariant (LTI) system is a hot research topic that has attracted quite a lot of attention (D. Ding, Han, et al., Citation2019; D. Ding et al., Citation2018; X.-M. Zhang et al., Citation2016, Citation2019). The protocol-induced effects lead to an enormous impact on the closed-loop system. Consider a typical linear time-invariant system of the following form:
Let the control input be
. Then, based on the transmission model (1), the dynamics of the closed-loop system subject to the ZOH method can be described as follows:
The dynamics of the closed-loop system subject to the ZI method can be described as follows:
Obviously, the above two difference equations are, in fact, linear time-invariant systems with certain switching behaviours. The main purpose of the communication-protocol-based control problem of time-invariant systems is to design the controller parameters subject to such switching systems. In C. Zhou et al. (Citation2012), a co-design strategy of TOD protocol scheduling and controller has been developed for a class of LTI systems, where the desired controller parameter has been acquired by solving a set of matrix inequalities. The results have been extended to the co-design problem of TOD protocol and controller for linear time-delay NSs in C. Zhou et al. (Citation2015), where the desired controller has been developed by using linear matrix inequality (LMI) techniques. Considering the input saturation effects, the control problem has been addressed in K. Liu and Fridman (Citation2014) for discrete-time systems with network-induced delays and TOD protocol scheduling by using the delay-dependent Lyapunov–Krasovskii method. The results have been extended to the control problem subject to RR protocol scheduling in K. Liu and Fridman (Citation2015), where the corresponding stability has been analysed based on the STDB framework. The quantised control problem has been investigated in K. Liu et al. (Citation2016) under the RR protocol scheduling, large communication delays and time-varying sampling intervals.
Considering the random packet dropouts in the communication channel, the optimal control problem has been studied in C. Zhu et al. (Citation2015) for linear time-invariant systems with RA protocol scheduling. The co-design of controller and protocol scheduling strategy has been investigated for linear NSs with random packet losses in W. Zhang et al. (Citation2015), where resulted closed-loop NSs have achieve a minimal decay rate. control issue is one of the research focuses in the field of networked control systems. In Ishii (Citation2008), the
control problem has been considered for linear systems with RR protocol scheduling and measurement missing effects. The control problem of medium-constrained vehicular networks has been studied in Guo and Wang (Citation2015) where a shared communication channel with protocol scheduling and channel fading effects has been considered. Considering that the statistical properties of the RA protocol scheduling is partly unknown, the output feedback controller has been designed in J. Zhang et al. (Citation2017) for linear NSs by solving a set of LMIs. In Guo and Wen (Citation2016), a so-called most regular binary sequences protocol has been considered and the corresponding controller has been designed by using piecewise Lyapunov functional and the average dwell time technique.
Filtering (or state estimation) is one of the most studied fundamental issues in signal processing and control communities (B. Chen, Yu, et al., Citation2014; T. Chen, Citation2017; Ge et al., Citation2019). For the filtering issue of a typical NS, the filtering process is implemented based on the received measurement data, which are largely affected by the adopted communication. Similar to the communication-protocol-based control problems, the filtering error systems under the effects of communication protocols can be modelled by linear time-invariant systems with certain switching behaviours. The main purpose of the communication-protocol-based filtering problem of time-invariant systems is to design the filter parameters subject to such switching systems. In Zou et al. (Citation2019b), the moving-horizon estimation problem has been studied for a class of linear time-delay systems under the RR protocol, where the developed estimation strategy has achieved a satisfactory performance by using a lifting-based design framework. In Zou, Wen, et al. (Citation2019), the communication-based train control (CBTC) system has been modelled by a LTI NS subject to certain communication protocol, and two ultimately bounded state estimators have been designed by solving two optimisation problems according to two different performance requirements (i.e. the minimisation of the ultimate bound and the fastest decay rate of the output estimation error). The filtering problem subject to certain communication protocol has been investigated in J. Zhang and Peng (Citation2019), where a continuous-time linear NS with a TOD protocol has been considered. Multi-rate sampling scheme is a widely utilised method in various practical systems to achieve the relatively low resource consumption. In Y. Shen et al. (Citation2020a), the
filter has been constructed for multi-rate multi-sensor systems subject to the p-persistent CSMA protocol (a special RA protocol), where the multi-rate system is converted to a single-rate system by adopting the lifting method.
3.2. Communication-protocol-based control and filtering of nonlinear systems
The control and filtering issues of nonlinear systems have always been two of the most challenging issues in the past decades. Considering the communication-protocol-based control problem for a typical nonlinear system described by (Equation2(2)
(2) ), the dynamics of the closed-loop systems subject to different signal compensation methods can be modelled, respectively, by
and
Similarly, for the communication-protocol-based filtering problems, the corresponding filtering error systems can also be modelled by such nonlinear switching systems. Compared with the linear systems, the dynamical behaviours of nonlinear systems are much more complex, thereby leading to difficulties in performance analysis and controller/filter design issues of nonlinear systems. So far, there are some representative methods dealing with the control and filtering problem of nonlinear systems, see, e.g. Ahmadi and Salmasi (Citation2015), D. Ding, Wang, et al. (Citation2019a, Citation2019b), Heemels et al. (Citation2010), Postoyan et al. (Citation2014) and Tabbara and Nešić (Citation2008). With the rapid development of NSs, the research on nonlinear NSs has gained considerable research interests owing to the potential applications in modern industry. The control problem of nonlinear systems subject to protocol scheduling is an important topic in such research. In Postoyan et al. (Citation2014), the tracking control problem has been addressed for nonlinear NSs subject to communication protocols, where the controller has been designed based on the IHSB framework. The reliable control problem has been investigated in Ahmadi and Salmasi (Citation2015) for nonlinear NSs with TOD protocol scheduling in presence of actuator faults, where the remote observer-based reliable controller has been designed by using Lyapunov–Krasovskii functional method and some matrix manipulations.
FlexRay is a deterministic communication protocol that is widely employed in automotive control. Under the effects of FlexRay, the transmission order of network nodes are orchestrated according to a pre-set communication cycles composed of a static segment and a dynamic segment that are periodically repeated. In W. Wang et al. (Citation2015), an emulation controller has been developed for nonlinear NSs subject to FlexRay scheduling based on the IHSB framework. Considering the case that the transmission delays are larger than the transmission intervals, the predictive control problem has been studied in Sun et al. (Citation2016) for nonlinear systems subject to communication protocols. The neural network is an effective tool dealing with nonlinear systems. In D. Ding, Wang, et al. (Citation2019a, Citation2019b), the neural-network-based output-feedback control problem has been investigated for nonlinear systems subject to communication protocols, where the adaptive dynamic programming method has been employed to handle the controller design issue. In Y. Li et al. (Citation2019), a neural-network-based adaptive controller has been designed for bilateral teleoperation systems with multiple slaves under Round-Robin scheduling protocol. The ultimate boundedness control problem issue has been addressed in Zou, Wang, Han, et al. (Citation2017) for a class of nonlinear NSs subject to TOD protocol scheduling, where the desired controller gains are derived by solving a convex optimisation problem. The T-S fuzzy modelling method is one of the most widely employed approaches to handle nonlinear systems. In Y. Dong et al. (Citation2020), the fuzzy model predictive control problem has been considered for discrete-time Takagi–Sugeno fuzzy systems under a so-called event-triggering-based TODprotocol.
The filter (or state estimator) design issue for nonlinear systems is a hot yet important topic in signal processing community. The existence of a communication protocol would further complicate the filter design task. In K.-Z. Liu et al. (Citation2016), the state estimator has been designed for a type of nonlinear NSs with communication protocols based on the IHSB framework and the small gain theorem. The communication-protocol-based state estimation problem for complex networks has been studied in Zou, Wang, Gao, and Liu (Citation2017) where the considered complex networks have been modelled by nonlinear time-delay systems. Measurement outliers might occur in system operation due to various reasons such as sensor malfunction, large non-Gaussian noises and cyber-attacks. Noting that the measurement outliers would pose serious threats to the filtering process, in Fu, Dong, Han, et al. (Citation2020), the filtering issue has been addressed for a type of nonlinear stochastic systems with RR protocol scheduling. Noting that the dynamics of certain complex systems can be modelled by nonlinear systems, the corresponding
filters have been proposed in H. Shen et al. (Citation2020) and Wan, Wang, Wu, et al. (Citation2019) for nonlinear complex networks and genetic regulatory networks. The well-known artificial neural network is a special nonlinear system whose nonlinearity is determined by the underlying neuron activation functions. In Alsaadi et al. (Citation2018), the finite-time state estimation issue has been investigated for delayed artificial neural networks, where a shared communication network with the RA protocol has been adopted for the signal transmissions between the sensors and estimator.
The quantisation and missing measurement phenomena are two widely studied network-induced complexities in NSs. The simultaneous existence of protocol scheduling effects and other network-induced complexities would further complicate the analysis and design issues of NSs. In Mao et al. (Citation2019), a networked recursive filter has been constructed for a type of nonlinear stochastic systems subject to uniform quantisation, missing measurements and RR protocol scheduling effects. Sliding mode observer is an effective estimator dealing with uncertain nonlinear systems. In S. Chen et al. (Citation2019), the sliding model observer design issue has been considered for a type of discrete nonlinear time-delay systems subject to the RA protocol scheduling, where sufficient conditions for the existence of the desired sliding model observer has been proposed in terms of the feasibility of a minimisation problem. By introducing a special extended dissipative property index, the generalised state estimation problem has been considered in H. Shen, Huo, et al. (Citation2019) for Markovian coupled networks under the RR protocol scheduling, where the Markovian coupled networks have been modelled by a nonlinear complex network with a Markov stochastic process. Moving horizon estimation is an effective scheme to tackle nonlinear systems. The communication-protocol-based moving horizon estimation problem has been studied in Zou et al. (Citation2019c) for nonlinear NSs by using a special robust-based scheme.
3.3. Communication-protocol-based control and filtering of uncertain systems
Uncertainties serve as a class of important complexities for system modelling, which describe the parameters changes in system dynamics. There are two kinds of uncertainties widely studied in the literature, namely the norm-bounded uncertainties (J. Hu et al., Citation2020; B. Shen et al., Citation2018) and the polytopic uncertainties (Rao et al., Citation2018; Shi & Peng, Citation2020). The existence of uncertainties would pose serious threats to the system performance (e.g. the stability of a closed-loop system). As such, the control and filtering problems subject to uncertainties have gained an ongoing research interest for various systems ; see, e.g. Basin and Maldonado (Citation2014), Caballero-Águila et al. (Citation2019) and X.-M. Zhang et al. (Citation2018). It is worth mentioning that, for a NS, the utilisation of communication protocol would further complicate the control and filter design of uncertain systems. Considering the communication-protocol-based control problem for a networked system with norm-bounded uncertainties, the dynamics of the closed-loop systems subject to different signal compensation methods can be described by the following models:
Obviously, the utilisation of communication protocols would affect the stability and robustness of closed-loop systems. To data, the communication-protocol-based control and filtering problems of uncertain systems have begun to stir some initial research interest. For instance, in K. Zhu, Song, and Ding (Citation2018), a resilient robust model predictive controller has been developed for polytopic uncertain systems subject to the TOD protocol scheduling by using an average dwell-time-based approach. The results have been extended to the model predictive control problem of polytopic uncertain systems with event-triggered mechanism and Round-Robin protocol scheduling in K. Zhu, Song, Ding, Wei, et al. (Citation2018). In Y. Song et al. (Citation2019), a robust
model predictive control problem has been studied for polytopic uncertain systems subject to the TOD protocol scheduling based on the SWB framework.
In J. Wang, Song, and Wei (Citation2019), the dynamic output-feedback robust model predictive control problem has been studied for polytopic uncertain systems with RR protocol, where a model-dependent observer has been developed to estimate the system states. The authors have then extended their results to the robust model predictive control problem for polytopic uncertain systems with state saturation nonlinearities under Round-Robin protocol scheduling in J. Wang, Song, Wei, and Dong (Citation2019), in which the state saturation nonlinearities have been reformulated into the sum of a finite number of linearities. The sliding mode control is an effective tool to handle the uncertainties by forcing the state trajectories subject to parameter perturbations to reach certain sliding manifolds. In J. Song, Wang, et al. (Citation2019), the authors have developed an sliding mode controller for discrete-time systems with norm-bounded uncertainties subject to the RA protocol scheduling, where the reachability of the sliding mode dynamics has been guaranteed by using a token-dependent stochastic Lyapunov function. The results have been extended to the sliding mode control problem for cyber-physical switched systems with RR protocol scheduling in H. Zhao et al. (Citation2020), where the input-to-state stability in probability has been analysed based on the linear matrix inequality method.
In practical applications, sometimes parameter uncertainties may occur in a random fashion. In D. Li et al. (Citation2019), the robust state estimation problem has been considered for two-dimensional systems with randomly occurring uncertainties, signal quantisation effects and RR protocol scheduling. The results have then been extended to the
control problem of a type of two-dimensional systems with randomly occurring uncertainties, nonlinearities and unknown time delays subject to RA protocol scheduling effects in D. Li et al. (Citation2020). It is worth noting that uncertainties can describe not only the parameters changes in plant dynamics, but also the parameters perturbations of the transmission behaviour (e.g. the statistical properties of RA protocol scheduling). In J. Li et al. (Citation2020), a remote
state estimator has been formulated for time-delay neural networks under the scheduling of RA protocol, where the scheduling behaviour of the RA protocol is governed by a Markov chain whose transmission probability is uncertain. For certain complex systems, the inner coupling strengths of nodes might suffer from some variations, which result in the so-called uncertain inner coupling. In D. Chen et al. (Citation2019), a resilient set-membership state estimator has been constructed for a type of time-varying complex networks with sensor saturation, uncertain inner coupling and distributed delays subject to the RR protocol. The communication-protocol-based filtering problem has been addressed in S. Liu, Wang, Chen, et al. (Citation2020) for nonlinear systems with stochastic uncertainties, where two resource-saving unscented Kalman filters have been developed.
3.4. Communication-protocol-based control and filtering of time-varying systems
In practical applications, a large number of systems are subject to certain time-varying parameters variations, and thereby leading to a rich body of research works concerning time-varying systems. Considering the communication-protocol-based control problem of a time-varying system, the closed-loop system can be described as follows:
The aim of communication-protocol-based control problems is to design the desired controllers for such time-varying systems subject to different switching behaviours. The communication-protocol-based control issue has been firstly investigated in Zou et al. (Citation2016a) for time-varying systems, where a dedicatedly constructed finite-horizon
controller has been proposed based on the solution of two coupled backward recursive Riccati difference equations. The authors have then extended their results to the finite-horizon
filtering problem subject to the RA protocol scheduling in Zou, Wang, Hu, et al. (Citation2017) for a type of time-varying NSs with a high-rate communication network, in which a mapping technique has been employed to model the randomly switching behaviour of the data transmission. The communication-protocol-based finite-horizon
state estimation issue has been studied in Z. Zhao et al. (Citation2018) for artificial neural networks with component-based distributed delays. In Zou et al. (Citation2016b), the set-membership filtering problem has been investigated for networked linear time-varying systems with protocol scheduling effects for the first time. The results have been extended to the communication-protocol-based set-membership filtering problem in J. Li et al. (Citation2018), where the plant under consideration is modelled by a time-varying nonlinear system with censored measurements. The quantised finite-horizon
filtering problem has been studied in S. Liu et al. (Citation2018) for multi-rate systems with RA protocol. The results have then been extended to the fusion estimation problem in Y. Shen et al. (Citation2020b) for multi-rate linear repetitive processes subject to the TOD protocol.
In practical systems, the controllers and filters might sometimes suffer from certain perturbations. In order to guarantee the desired system performance, the so-called resilient scheme has been adopted in the controllers and filters design processes. In Yuan, Wang, et al. (Citation2019), a near-optimal resilient controller has been developed for networked time-varying systems with gain perturbations, state saturations and additive nonlinearities, where the RA protocol has been utilised to scheduling the signal transmissions between the sensors and the controller. Event-triggered transmission is an effective approach to reduce transmission frequency. The noncooperative event-triggered control problem has been proposed in Yuan et al. (Citation2020) for time-varying NSs under the RR protocol scheduling. Furthermore, the developed control strategy has been applied to the load frequency control problem in circuit systems to show the effectiveness of the proposed method.
Note that the communication-protocol-based control and filter issues are very important for complex networks, since it is quite crucial to guarantee the efficient communication among nodes. The communication-protocol-based filtering issues of time-varying complex networks have been address in L. Shen et al. (Citation2018) and D. Wang et al. (Citation2019) with random coupling strengths and state saturations, respectively, where the corresponding filters have been designed by using the backward recursive Riccati difference equations method and the recursive linear matrix inequality technique. Similar communication-protocol-based
estimation method has been employed to deal with the genetic regulatory networks in Wan, Wang, Han, et al. (Citation2019), where the genetic regulatory networks have been modelled by time-varying systems with nonlinearities. The filtering error covariance is an important to evaluate the estimation accuracy under stochastic noises. By minimising the traces of error covariance (or the upper bounds of error covariance), a communication-protocol-based Kalman filters and communication-protocol-based extended Kalman filter have been designed in S. Liu, Wang, Hu, et al. (Citation2020) and Zou et al. (Citation2019a) for linear time-varying systems and nonlinear time-varying systems, respectively. In H. Zhang et al. (Citation2019), a recursive filter has been developed for time-varying nonlinear complex networks under RA protocol scheduling effects. A recursive full information estimator has been designed in Zou et al. (Citation2019d) for time-varying systems subject to the RR scheduling by solving a minimisation problem, where the upper bound of the norm of the state estimation error has been achieved.
3.5. Communication-protocol-based control and filtering of distributed networked systems
For the communication-protocol-based control problem of a distributed system, the dynamics of node i can be described by
where
,
denote the state information and the measurement noise information of the neighbour nodes for node i;
is the scheduling behaviour of the transmissions between the node i and its neighbour nodes. Obviously, such communication-protocol-based control problem for distributed networked systems are more challenging compared with the centralised networked systems. The main difficulty to deal with such a control problem is induced by the complex scheduling behaviour described by
. Similarly, for the communication-protocol-based distributed filtering problems, the corresponding filtering error systems can also be modelled by such distributed systems with complex scheduling behaviour. The communication-protocol-based distributed filtering problem has been firstly studied in Ugrinovskii and Fridman (Citation2014), where the RR protocol has been adopted to scheduling the signal transmissions among sensor nodes. The results have been further extended to the finite-time distributed state estimation issue in Xu et al. (Citation2018) for nonlinear systems over sensor networks with RR protocol scheduling effects and fading channels. Considering the case that the network-based communication suffers from cyber-attacks, the communication-protocol-based distributed secure filtering problem has been investigated in K. Liu et al. (Citation2020) for linear NSs in the STDB framework. Considering the filtering problem of time-varying state-saturated systems, a communication-protocol-based distributed recursive filtering scheme has been developed in B. Shen et al. (Citation2020), where a special matrix simplification approach has been utilised to tackle the sensor network topology's sparseness issue. The distributed set-membership filtering problem has been studied in S. Chen et al. (Citation2020) for nonlinear systems subject to RR and RA protocols over sensor networks.
The resilient method is capable of reducing the impact of the system performance on the gain perturbations of the controller (or filter). The distributed resilient control and filter problems have been addressed, respectively, in Yuan, Shi et al. (Citation2019) and L. Shen et al. (Citation2019) subject to communication protocols. Considering the time-varying multi-agent systems, the finite-horizon consensus control problems have been studied in J. Song, Han, et al. (Citation2019) and Zou, Wang, Gao, and Alsaadi (Citation2017) subject to the RA protocol and RR protocol, respectively.
4. Communication-protocol-based fault diagnosis
In real-world applications, practical systems usually suffer the threats of faults that might take place in various system components. As such, the research on fault diagnosis has attracted significant attention ; see, e.g. S. X. Ding et al. (Citation2014), J. Li et al. (Citation2019), Y. Wang et al. (Citation2014) and Yang and Yin (Citation2019) and the references therein. Generally speaking, the research works of fault diagnosis include fault detection, fault estimation and fault isolation problems. The fault detection and isolation problems of NSs have been first reported in Long and Yang (Citation2014), where the RA protocol has been employed to schedule the transmission between the sensors and the remote fault detection and isolation filter. Furthermore, a finite frequency stochastic performance requirement has been achieved by using the linear matrix inequality method. The results have been extended to the
fault detection issue with RA protocol in Long and Yang (Citation2015) and the frequency-dependent fault detection issue with TOD protocol in Long et al. (Citation2020). The robust
fault detection issue has been considered in Luo, Wang, Wei, and Alsaadi (Citation2017) for nonlinear 2-D systems with so-called randomly occurring linear fractional uncertainties under the effects of RR protocol. The authors have then extended the results in Luo, Wang, and Wei (Citation2017), where an
fuzzy fault detection filter has been developed for networked fuzzy systems with multiplicative noises subject to the RR protocol scheduling.
Considering the phenomenon of missing measurements with the uncertain occurrence probabilities, the communication-protocol-based fault detection has been studied in W. Chen et al. (Citation2018) for time-delay systems with missing measurements under uncertain missing probabilities. The authors have then extended their results in W. Chen et al. (Citation2020), where a robust fault detection filter has been developed for nonlinear systems with data drift and randomly occurring faults subject to TOD protocol. In Ju et al. (Citation2019), the fault detection has been considered over a finite-frequency domain for time-delay NSs with RR protocol scheduling, in which both the required and
performance indices have been achieved by using an improved Kalman–Yakubovich–Popov lemma. Considering the gain variations in the filter, the non-fragile
fault detection problem has been proposed in Ren et al. (Citation2020) for fuzzy systems subject to the RA protocol by adopting the strong centralised stochastic analysis technique and the matrix calculation method. In Gao et al. (Citation2020), the distributed fault estimation problem has been investigated for a type of delayed complex networks subject to the RR protocol, where a set of unknown input observers have been designed to decouple the external disturbance from the estimation process as much as possible.
Recently, the fault detection and estimation problems of time-varying systems have received an increasing amount of attention. The fault detection problem has been investigated in Ju et al. (Citation2020) and Gao et al. (Citation2019) for time-varying systems subject to TOD protocol and RR protocol, respectively. In Fu, Dong, Song, et al. (Citation2020), the finite-horizon problem has been studied for a type of nonlinear time-varying systems with randomly occurring faults subject to the RR protocol. The main idea of fault estimation is to reconstruct the desired fault information (e.g. the size and shape of the fault) based on the available measurements. The information about the fault could help to improve the reliability of control systems. In H. Dong et al. (Citation2019), the communication-protocol-based fault estimation problem has been studied for time-varying systems with randomly occurring sensor nonlinearities where the desired fault estimator has been designed by using the recursive linear matrix inequality technique.
5. Some challenging issues
In the past decade, we have witnessed significant progress on the communication-protocol-based filtering and control for various NSs, including the LTI systems, nonlinear systems, uncertain systems, time-varying systems and distributed systems. A large number of research results have been reported in the literature to handle the performance analysis, control, filtering and fault diagnosis problems. In this section, we would like to highlight some challenging problems with respect to the research topics.
5.1. Modelling technology of transmission behaviours under communication protocols
The transmission model is the fundamental issue for the analysis and synthesis of a NS. Accordingly, it is of great importance for model-based control and filtering problems to develop accurate models describing the transmission behaviours under communication protocols. By now, such transmission behaviours are ideally described by switching models or impulsive hybrid models. Such models are, in fact, incapable of fully characterising the impacts of communication protocols. In practical applications, the scheduling processes of communication protocols are quite complex, which implies that the existing transmission models are rather idealisation and simplification. For instance, the well-known Carrier Sense Multiple Access with Collision Avoid (CSMA/CA) protocol is a widely used scheduling protocol, in which each network node would first listen to the channel to see if the channel is available before sending data. Such a protocol would perform four steps when a network node needs an opportunity to get access to the network channel: (1) listen to the favoured channel for its status (idle or busy); (2) if the channel is sensed as idle, try to send a data packet; (3) if the channel is busy, wait for certain interval (a random backoff time) and then check again to see if the channel is idle; (4) if the channel is known to be busy, repeat the procedure the process in step 3 until it obtains the network access. Obviously, the existing transmission model under the RA protocol has not fully captured the scheduling behaviours of the CSMA/CA protocol.In order to achieve the more reasonable transmission models under the communication protocols, it is necessary to fully understand the detailed working processes of various communication protocols and introduce the valid assumptions based on experimental tests (e.g. the assumption about the stochastic process in RA protocol scheduling, the assumption about the transmission interval of the network-based communication). Furthermore, sometimes the data transmissions of a NS are implemented over multiple communication networks subject to various communication protocols. In this case, it is quite important yet challenging to study the modelling technique about the transmission behaviours under the combined impacts of multiple communication protocols.
5.2. Analysis of protocol scheduling effects on system performance
Performance analysis of NSs subject to protocol scheduling effects is an important foundational issue of the research on communication-protocol-based control and filtering problems. So far, many important results have been reported in the literature concerning the analysis of the protocol-induced effects on stability issue of NSs based on three frameworks (i.e. the SWB framework, IHSB framework and STDB framework). Nevertheless, the analysis issues on other system performance indices have not yet gained adequate research attention despite their practical significance. The analysis issues include, but are not limited to, the passivity analysis, dissipation analysis, analysis on settling time, and analysis on index. Obviously, it is difficult to deal with these analysis issues based on the existing three frameworks. How to develop suitable frameworks for such analysis issues is a challenging problem.
On the other hand, for a NS, the utilisation of communication protocol would enhance the communication reliability while degrade the communication efficiency. In the communication-protocol-based communication scheme, the number of network nodes and the transmission interval would have a great impact on the system performance. Generally speaking, there is a trade-off between such two issues and the resulted system performance. Nevertheless, the analysis about such two issues has not been properly investigated. How to examine the impacts of such two issues on various system performance indices (e.g. the stability, settling time, index) is a challenging research topic.
5.3. Communication-protocol-based control and filtering of distributed parameter systems
In the past decades, distributed parameter systems (DPSs) have found applications in a wide range of fields, including ocean sampling, oil spill and cellular neural networks (R.-G. Li & Wu, Citation2020). In reality, most DPSs are modelled by partial differential equations (PDEs). The analysis and synthesis issues of such kind of systems are more challenging compared with the widely studied lumped parameter systems (which are described by ordinary differential equations). Recently, the control and filtering problems of networked DPSs have drawn some refreshed research attention ; see, e.g. Demetriou (Citation2015), X. Song, Wang, Ahn, et al. (Citation2020), X. Song, Wang, Song, et al. (Citation2020) and Z.-P. Wang and Wum (Citation2017). Nevertheless, the communication-protocol-based control and filtering problems of DPSs have not yet received adequate research attention despite their practical significance.
Generally speaking, the analysis frameworks and design tools of DPSs are quite different from those of lumped parameter systems. As such, the research results of communication-protocol-based control and filter of lumped parameter systems cannot be directly extended to DPSs. Obviously, it is not easy to establish the reasonable research frameworks for networked DPSs with communication protocols and some new technologies should be developed to deal with the corresponding analysis and synthesis issues.
6. Conclusions and future work
In this paper, we have reviewed and discussed the results, mostly from relatively recent works, on the communication-protocol-based control and filtering problems. Firstly, we have briefly introduced the engineering background of NSs subject to communication protocols and discussed the theoretical frameworks dealing with the analysis and synthesis problems of NSs subject to communication protocols. Then, the stability analysis, control and filtering problems have been surveyed in a great deal for various systems subject to different communication protocols. After that, we have reviewed the communication-protocol-based fault diagnosis problems (including the fault detection, fault estimation and fault isolation problems) for several NSs. Finally, we have considered some challenging problems concerning the communication-protocol-based control and filtering issues. Next, let us point out some related research directions in the area of communication-protocol-based control and filtering which are worthy of further studies:
In real-world applications, the signal transmissions of a NS might be implemented via multiple communication networks with different protocols. The corresponding control and filtering processes of such a NS are affected by the combined effects induced by these communication protocols. In this sense, such control and filtering problems are referred to as the control and filtering problems subject to hybrid communication protocols. The dynamical behaviours of a NS with the hybrid communication protocol are quite different from those with the single communication protocol. Hence, it would be a promising research topic to develop the suitable approaches to handle the corresponding control and filtering problems.
The studies on the adaptive control and filtering problems subject to communication protocols are very few. Adaptive strategies are capable of handling the systems with unknown parameters. In practical applications, sometimes the parameters of the underlying communication protocols are fully accessible for a variety of reasons. Hence, the adaptive control and filtering techniques might fit well with such a case. Obviously, it leads to a particularly attractive area for investigating the adaptive control and filtering problems subject to communication protocols.
It should be note that the extensively studied communication protocols (the RR, TOD, RA protocols) are, in fact, some widely utilised time division multiple access (TDMA) protocols in modern industry. Code division multiple access (CDMA) protocol is another well-known a communication protocol that is widely adopted in cellular telephone systems. The transmission behaviours under the CDMA protocol are quite distinguished from those under the TDMA protocol. Accordingly, the existing research frameworks are incapable of dealing with the analysis and synthesis issues under the CDMA protocol. As such, a trend for future research is to develop certain new research frameworks to deal with the analysis and synthesis of NSs with CDMA protocols.
As we have discussed in Section 5.1, the widely studied models of communication protocols are incapable of fully characterising the impacts of protocols on signal transmissions, which prevents us from tackle the practical NSs subject to communication protocols. By now, the research works on applications of the established communication-protocol-based control and filter methods are very few despite their practical significance. This is mainly due to the fact that it is always very difficult to obtain reasonable models describing the transmission behaviours under communication protocols. Obviously, it would be a promising research topic to study the applications of the established theories and methodologies to some practical engineering problems.
In practical applications, sometimes it is extremely difficult to obtain accurate system models. As such, the aforementioned model-based methods are not applicable to such systems. Model-free schemes would be the ideal approaches to handle the corresponding control and estimation problems. To date, a large number of results have been reported in the literature concerning the model-free control problem for different systems (Hou & Xiong, Citation2019; S. Liu, Hou, et al., Citation2020; W. Zhang et al., Citation2021). Nevertheless, the model-free control problem subject to communication protocols has not gained adequate research attention despite its potential in practical applications. Hence, it would be of significant engineering importance to develop model-free control strategies for NSs with protocol scheduling effects.
Nowadays, machine learning optimisation methods have gained an increasing amount of attention due to the strong applicability. Note that the existence of communication protocols in practical systems (especially large-scale complex systems) would greatly complicate the system behaviours. The utilisation of machine learning optimisation methods in the controller and filter design processes would significant improve the resulted system performance. Hence, it is of great significance to consider how to design the optimal control and filtering strategies by using the machine learning optimisation methods.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
Notes on contributors
Lei Zou
Lei Zou received the B.Sc. degree in automation from Beijing Institute of Petrochemical Technology in 2008, the M.Sc. degree in control science and engineering from China University of Petroleum (Beijing Campus) in 2011, and the Ph.D. degree in control science and engineering in 2016 from Harbin Institute of Technology. From October 2013 to October 2015, he was a visiting Ph.D. student with the Department of Computer Science, Brunel University London, U.K. Since 2019, he has been working as a Research Fellow with the Department of Computer Science, Brunel University London, U.K. His research interests include control and filtering of networked systems, moving horizon estimation, and state estimation subject to outliers. Dr. Zou is currently serving as an Associate Editor for Neurocomputing, International Journal of Systems Science and International Journal of Control, Automation and Systems; a Senior Member of IEEE and a Member of Chinese Association of Automation; and a very active reviewer for many international journals.
Zidong Wang
Zidong Wang was born in Jiangsu, China, in 1966. He received the B.Sc. degree in mathematics in 1986 from Suzhou University, Suzhou, China, and the M.Sc. degree in applied mathematics in 1990 and the Ph.D. degree in electrical engineering in 1994, both from Nanjing University of Science and Technology, Nanjing, China. He is currently Professor of Dynamical Systems and Computing in the Department of Computer Science, Brunel University London, U.K. From 1990 to 2002, he held teaching and research appointments in universities in China, Germany and the UK. Prof. Wang's research interests include dynamical systems, signal processing, bioinformatics, control theory and applications. He has published 250+ papers in IEEE Transactions and 60+papers in Automatica. He is a holder of the Alexander von Humboldt Research Fellowship of Germany, the JSPS Research Fellowship of Japan, William Mong Visiting Research Fellowship of Hong Kong. Prof. Wang serves (or has served) as the Editor-in-Chief for Neurocomputing, the Deputy Editor-in-Chief for International Journal of Systems Science, and an Associate Editor for 12 international journals including IEEE Transactions on Automatic Control, IEEE Transactions on Control Systems Technology, IEEE Transactions on Neural Networks, IEEE Transactions on Signal Processing, and IEEE Transactions on Systems, Man, and Cybernetics-Part C. He is a Member of the Academia Europaea, a Fellow of the IEEE, a Fellow of the Royal Statistical Society and a member of program committee for many international conferences.
Jun Hu
Jun Hu received the B.Sc. degree in information and computation science and the M.Sc. degree in applied mathematics from the Harbin University of Science and Technology, Harbin, China, in 2006 and 2009, respectively, and the Ph.D. degree in control science and engineering from the Harbin Institute of Technology, Harbin, in 2013. From September 2010 to September 2012, he was a Visiting Ph.D. Student with the Department of Information Systems and Computing, Brunel University London, Uxbridge, U.K. From May 2014 to April 2016, he was an Alexander von Humboldt Research Fellow with the University of Kaiserslautern, Kaiserslautern, Germany. From January 2018 to January 2021, he was a Research Fellow with the University of South Wales, Pontypridd, U.K. He is currently a Professor with the Department of Mathematics, Harbin University of Science and Technology. He has published more than 70 articles in refereed international journals. His research interests include nonlinear control, filtering and fault estimation, time-varying systems, and complex networks. Dr. Hu serves as a Reviewer for Mathematical Reviews, as an Editor for Neurocomputing, Journal of Intelligent & Fuzzy Systems, Neural Processing Letters, and Systems Science & Control Engineering, and a Guest Editor for the International Journal of General Systems and Information Fusion.
Yurong Liu
Yurong Liu was born in China in 1964. He received his B.Sc. degree in Mathematics from Suzhou University, Suzhou, China, in 1986, the M.Sc. degree in Applied Mathematics from Nanjing University of Science and Technology, Nanjing, China, in 1989, and the Ph. D. degree in Applied Mathematics from Suzhou University, Suzhou, China, in 2001. Dr. Liu is currently a professor with the Department of Mathematics, Yangzhou University, China. He also serves as an Associate Editor of Neurocomputing. So far, he has published more than 100 papers in refereed international journals. His current interests include stochastic control, neural networks, complex networks, nonlinear dynamics, time-delay systems, multi-agent systems, and chaotic dynamics.
Xiaohui Liu
Xiaohui Liu received the B.Eng. degree in computing from Hohai University in 1982, and the Ph.D. degree in computer science from Heriot-Watt University, U.K., in 1988. He is currently a Professor of computing at Brunel University, U.K. He leads the Intelligent Data Analysis (IDA) Group, performing interdisciplinary research involving artificial intelligence, dynamic systems, image and signal processing, and statistics, particularly for applications in biology, engineering and medicine. Professor Liu serves on editorial boards of four computing journals, founded the biennial international conference series on IDA in 1995, and has given numerous invited talks in bioinformatics, data mining and statistics conferences.
References
- Ahmadi, A., & Salmasi, F. R. (2015). Observer-based reliable control for Lipschitz nonlinear networked control systems with quadratic protocol. International Journal of Control, Automation, and Systems, 13(3), 753–763. https://doi.org/https://doi.org/10.1007/s12555-014-0212-3
- Alsaadi, F. E., Luo, Y., Liu, Y., & Wang, Z. (2018). State estimation for delayed neural networks with stochastic communication protocol: The finite-time case. Neurocomputing, 281, 86–95. https://doi.org/https://doi.org/10.1016/j.neucom.2017.11.067
- Antunes, D., Hespanha, J. P., & Silvestre, C. (2015). Stochastic networked control systems with dynamic protocols. Asian Journal of Control, 17(1), 99–110. https://doi.org/https://doi.org/10.1002/asjc.841
- Basin, M. V., & Maldonado, J. J. (2014). Optimal controller for uncertain stochastic linear systems with Poisson noises. IEEE Transactions on Industrial Informatics, 10(1), 267–275. https://doi.org/https://doi.org/10.1109/TII.2013.2248160
- Bauer, N. W., Donkers, M. C. F., van de Wouw, N., & Heemels, W. P. M. H. (2013). Decentralized observer-based control via networked communication. Automatica, 49(7), 2074–2086. https://doi.org/https://doi.org/10.1016/j.automatica.2013.04.019
- Caballero-Águila, R., García-Garrido, I., & Linares-Pérez, J. (2014). Information fusion algorithms for state estimation in multi-sensor systems with correlated missing measurements. Applied Mathematics and Computation, 226, 548–563. https://doi.org/https://doi.org/10.1016/j.amc.2013.10.068
- Caballero-Águila, R., Hermoso-Carazo, A., & Linares-Pérez, J. (2019). Centralized, distributed and sequential fusion estimation from uncertain outputs with correlation between sensor noises and signal. International Journal of General Systems, 48(7), 713–737. https://doi.org/https://doi.org/10.1080/03081079.2019.1659257
- Carnevale, D., Teel, A. R., & Nešić, D. (2011). A Lyapunov proof of an improved maximum allowable transfer interval of networked control systems. IEEE Transactions on Automatic Control, 52(5), 892–897. https://doi.org/https://doi.org/10.1109/TAC.2007.895913
- Chen, T. (2017). Robust state estimation for power systems via moving horizon strategy. Sustainable Energy, Grids and Networks, 10, 46–54. https://doi.org/https://doi.org/10.1016/j.segan.2017.02.005
- Chen, S., Guo, J., & Ma, L. (2019). Sliding mode observer design for discrete nonlinear time-delay systems with stochastic communication protocol. International Journal of Control, Automation and Systems, 17(7), 1666–1676. https://doi.org/https://doi.org/10.1007/s12555-018-0727-0
- Chen, W., Hu, J., Yu, X., Chen, D., & Du, J. (2020). Robust fault detection for nonlinear discrete systems with data drift and randomly occurring faults under weighted try-once-discard protocol. Circuits, Systems, and Signal Processing, 39(1), 111–137. https://doi.org/https://doi.org/10.1007/s00034-019-01184-0
- Chen, W., Hu, J., Yu, X., & Chen, D. (2018). Protocol-based fault detection for discrete delayed systems with missing measurements: the uncertain missing probability case. IEEE Access, 6, 76616–76626. https://doi.org/https://doi.org/10.1109/Access.6287639
- Chen, S., Ma, L., & Ma, Y. (2020). Distributed setmembership filtering for nonlinear systems subject to round-robin protocol and stochastic communication protocol over sensor networks. Neurocomputing, 385, 13–21. https://doi.org/https://doi.org/10.1016/j.neucom.2019.11.056
- Chen, D., Yang, N., Hu, J., & Du, J. (2019). Resilient set-membership state estimation for uncertain complex networks with sensor saturation under Round-Robin protocol. International Journal of Control, Automation and Systems, 17(12), 3035–3046. https://doi.org/https://doi.org/10.1007/s12555-018-0780-8
- Chen, B., Yu, L., Zhang, W.-A., & Wang, H. (2014). Distributed H∞ fusion filtering with communication bandwidth constraints. Signal Processing, 96, 284–289. https://doi.org/https://doi.org/10.1016/j.sigpro.2013.09.015
- Chen, B., Zhang, W.-A., & Yu, L. (2014). Distributed fusion estimation with missing measurements, random transmission delays and packet dropouts. IEEE Transactions on Automatic Control, 59(7), 1961–1967. https://doi.org/https://doi.org/10.1109/TAC.2013.2297192
- Dačić, D. B., & Nešić, D. (2007). Quadratic stabilization of linear networked control systems via simultaneous protocol and controller design. Automatica, 43(7), 1145–1155. https://doi.org/https://doi.org/10.1016/j.automatica.2006.12.027
- Demetriou, M. A. (2015). Adaptation and optimization of synchronization gains in the regulation control of networked distributed parameter systems. IEEE Transactions on Automatic Control, 60(8), 2219–2224. https://doi.org/https://doi.org/10.1109/TAC.2014.2372907
- Dimarogonas, D. V., Frazzoli, E., & Johansson, K. H. (2012). Distributed event-triggered control for multi-agent systems. IEEE Transactions on Automatic Control, 57(5), 1291–1297. https://doi.org/https://doi.org/10.1109/TAC.2011.2174666
- Ding, D., Han, Q.-L., Wang, Z., & Ge, X. (2019). A survey on model-based distributed control and filtering for industrial cyber-physical systems. IEEE Transactions on Industrial Informatics, 15(5), 2483–2499. https://doi.org/https://doi.org/10.1109/TII.9424
- Ding, D., Han, Q.-L., Xiang, Y., Ge, X., & Zhang, X.-M. (2018). A survey on security control and attack detection for industrial cyber-physical systems. Neurocomputing, 275, 1674–1683. https://doi.org/https://doi.org/10.1016/j.neucom.2017.10.009
- Ding, S. X., Shen, B., Wang, Z., & Zhong, M. (2014). A fault detection scheme for linear discrete-time systems with an integrated online performance evaluation. International Journal of Control, 87(12), 2511–2521. https://doi.org/https://doi.org/10.1080/00207179.2014.930183
- Ding, D., Wang, Z., & Han, Q.-L. (2019a). Neural-network-based output-feedback control with stochastic communication protocols. Automatica, 106, 221–229. https://doi.org/https://doi.org/10.1016/j.automatica.2019.04.025
- Ding, D., Wang, Z., Han, Q.-L., & Wei, G. (2019b). Neural-betwork-vased output-feedback control under Round-Robin scheduling protocols. IEEE Transactions on Cybernetics, 49(6), 2372–2384. https://doi.org/https://doi.org/10.1109/TCYB.2018.2827037
- Dong, H., Hou, N., Wang, Z., & Liu, H. (2019). Finite-horizon fault estimation under imperfect measurements and stochastic communication protocol: Dealing with finite-time boundedness. International Journal of Robust Nonlinear Control, 29(1), 117–134. https://doi.org/https://doi.org/10.1002/rnc.4382
- Dong, Y., Song, Y., Wang, J., & Zhang, B. (2020). Dynamic output-feedback fuzzy MPC for Takagi-Sugeno fuzzy systems under event-triggering-based try-once-discard protocol. International Journal of Robust Nonlinear Control, 30(4), 1394–1416. https://doi.org/https://doi.org/10.1002/rnc.v30.4
- Donkers, M. C. F., Heemels, W. P. M. H., Bernardini, D., Bemporad, A., & Shneer, V. (2012). Stability analysis of stochastic networked control systems. Automatica, 48(5), 917–925. https://doi.org/https://doi.org/10.1016/j.automatica.2012.02.029
- Donkers, M. C. F., Heemels, W. P. M. H., van de Wouw, N., & Hetel, L. (2011). Stability analysis of networked control systems using a switched linear systems approach. IEEE Transactions on Automatic Control, 56(9), 2101–2115. https://doi.org/https://doi.org/10.1109/TAC.2011.2107631
- Fu, H., Dong, H., Han, F., Shen, Y., & Hou, N. (2020). Outlier-resistant H∞ filtering for a class of networked systems under Round-Robin protocol. Neurocomputing, 403, 133–142. https://doi.org/https://doi.org/10.1016/j.neucom.2020.04.058
- Fu, H., Dong, H., Song, J., Hou, N., & Li, G. (2020). Fault estimation for time-varying systems with Round-Robin protocol. Kybernetika, 56(1), 107–126. https://doi.org/10.14736/kyb-2020-1-0107
- Gao, M., Yang, S., Sheng, L., & Zhou, D. (2019). Fault diagnosis for time-varying systems with multiplicative noises over sensor networks subject to Round-Robin protocol. Neurocomputing, 346, 65–72. https://doi.org/https://doi.org/10.1016/j.neucom.2018.08.087
- Gao, M., Zhang, W., Sheng, L., & Zhou, D. (2020). Distributed fault estimation for delayed complex networks with Round-Robin protocol based on unknown input observer. Journal of the Franklin Institute, 357(13), 8678–8702. https://doi.org/https://doi.org/10.1016/j.jfranklin.2020.04.012
- Ge, X., Han, Q.-L., Zhang, X.-M., Ding, L., & Yang, F. (2019). Distributed event-triggered estimation over sensor networks: A survey. IEEE Transactions on Cybernetics, 50, 1306–1320. doi:https://doi.org/10.1109/TCYB.2019.2917179
- Ge, X., Yang, F., & Han, Q.-L. (2017). Distributed networked control systems: a brief overview. Information Sciences, 380, 117–131. https://doi.org/https://doi.org/10.1016/j.ins.2015.07.047
- Guo, G., & Wang, L. (2015). Control over medium-constrained vehicular networks with fading channels and random access protocol: A networked systems approach. IEEE Transactions on Vehicular Technology, 64(8), 3347–3358. https://doi.org/https://doi.org/10.1109/TVT.2014.2360438
- Guo, G., & Wen, S. (2016). Protocol sequence and control co-design for a collection of networked control systems. International Journal of Robust and Nonlinear Control, 26(3), 489–508. https://doi.org/https://doi.org/10.1002/rnc.v26.3
- Han, H., Zhang, X., & Zhang, W. (2016). Robust distributed model predictive control under actuator saturations and packet dropouts with time-varying probabilities. IET Control Theory & Applications, 10(5), 534–544. https://doi.org/https://doi.org/10.1049/cth2.v10.5
- Heemels, W. P. M. H., Donkers, M. C. F., & Teel, A. R. (2013). Periodic event-triggered control for linear systems. IEEE Transactions on Automatic Control, 58(4), 847–861. https://doi.org/https://doi.org/10.1109/TAC.2012.2220443
- Heemels, W. P. M. H., Teel, A. R., van de Wouw, N., & Nešić, D. (2010). Networked control systems with communication constraints: Tradeoffs between transmission intervals, delays and performance. IEEE Transactions on Automatic Control, 55(8), 1781–1796. https://doi.org/https://doi.org/10.1109/TAC.2010.2042352
- Hou, Z., & Xiong, S. (2019). On model-free adaptive control and its stability analysis. IEEE Transactions on Automatic Control, 64(11), 4555–4569. https://doi.org/https://doi.org/10.1109/TAC.9
- Hu, J., Wang, Z., Liu, G.-P., & Zhang, H. (2020). Variance-constrained recursive state estimation for time-varying complex networks with quantized measurements and uncertain inner coupling. IEEE Transactions on Neural Networks and Learning Systems, 31(6), 1955–1967. https://doi.org/https://doi.org/10.1109/TNNLS.5962385
- Hu, B., Wang, Y., Orlik, P. V., Koike-Akino, T., & Guo, J. (2019). Co-design of safe and efficient networked control systems in factory automation with state-dependent wireless fading channels. Automatica, 105, 334–346. https://doi.org/https://doi.org/10.1016/j.automatica.2019.04.009
- Ishii, H. (2008). H∞ control with limited communication and message losses. Systems & Control Letters, 57(4), 322–331. https://doi.org/https://doi.org/10.1016/j.sysconle.2007.09.007
- Ju, Y., Wei, G., Ding, D., & Liu, S. (2020). A novel fault detection method under weighted try-once-discard scheduling over sensor networks. IEEE Transactions on Control of Network Systems, 7(3), 1489–1499. https://doi.org/https://doi.org/10.1109/TCNS.6509490
- Ju, Y., Wei, G., Ding, D., & Zhang, S. (2019). Fault detection for discrete time-delay networked systems with round-robin protocol in finite-frequency domain. International Journal of Systems Science, 50(13), 2497–2509. https://doi.org/https://doi.org/10.1080/00207721.2019.1671530
- Li, D., Liang, J., & Wang, F. (2019). H∞ state estimation for two-dimensional systems with randomly occurring uncertainties and Round-Robin protocol. Neurocomputing, 349, 248–260. https://doi.org/https://doi.org/10.1016/j.neucom.2019.03.052
- Li, D., Liang, J., Wang, F., & Ren, X. (2020). Observer-based H∞ control of two-dimensional delayed networks under the random access protocol. Neurocomputing, 401, 353–363. https://doi.org/https://doi.org/10.1016/j.neucom.2020.03.044
- Li, J., Wang, Z., Dong, H., & Fei, W. (2020). Delay-distribution-dependent state estimation for neural networks under stochastic communication protocol with uncertain transition probabilities. Neural Networks, 130, 143–151. https://doi.org/https://doi.org/10.1016/j.neunet.2020.06.023
- Li, B., Wang, Z., Han, Q.-L., & Liu, H. (2019). Input-to-state stabilization in probability for nonlinear stochastic systems under quantization effects and communication protocol. IEEE Transactions on Cybernetics, 49(9), 3242–3254. https://doi.org/https://doi.org/10.1109/TCYB.6221036
- Li, J., Wei, G., Ding, D., & Li, Y. (2018). Set-membership filtering for discrete time-varying nonlinear systems with censored measurements under Round-Robin protocol. Neurocomputing, 281, 20–26. https://doi.org/https://doi.org/10.1016/j.neucom.2017.11.033
- Li, J., Wei, G., Ding, D., & Zhang, S. (2019). Event-triggered fault detection for switched systems with time-varying sojourn probabilities. International Journal of Robust and Nonlinear Control, 29(18), 6463–6482. https://doi.org/https://doi.org/10.1002/rnc.v29.18
- Li, R.-G., & Wu, H.-N. (2020). Iterative approach with optimization-based execution scheme for parameter identification of distributed parameter systems and its application in secure communication. IEEE Transactions on Circuits and Systems I: Regular Papers, 67(9), 3113–3126. https://doi.org/https://doi.org/10.1109/TCSI.8919
- Li, Y., Zhang, K., Liu, K., Johansson, R., & Yin, Y. (2019). Neural-network-based adaptive control for bilateral teleoperation with multiple slaves under Round-Robin scheduling protocol. International Journal of Control. https://doi.org/https://doi.org/10.1080/00207179.2019.1652853
- Li, T., Zhang, W.-A., & Yu, L. (2019). Improved switched system approach to networked control systems with time-varying delays. IEEE Transactions on Control Systems Technology, 27(6), 2711–2717. https://doi.org/https://doi.org/10.1109/TCST.87
- Lian, B., Zhang, Q., & Li, J. (2019). Integrated sliding mode control and neural networks based packet disordering prediction for nonlinear networked control systems. IEEE Transactions on Neural Networks and Learning Systems, 30(8), 2324–2335. https://doi.org/https://doi.org/10.1109/TNNLS.5962385
- Liu, K., & Fridman, E. (2014). Discrete-time network-based control under try-once-discard protocol and actuator constraints. In Proceedings of the 2014 European Control Conference (ECC) (pp. 442–447). IEEE.
- Liu, K., & Fridman, E. (2015). Discrete-time network-based control under scheduling and actuator constraints. International Journal of Robust and Nonlinear Control, 25(12), 1816–1830. https://doi.org/https://doi.org/10.1002/rnc.3179
- Liu, K., Fridman, E., & Hetel, L. (2012). Stability and L2-gain analysis of networked control systems under Round-Robin scheduling: A time-delay approach. Systems & Control Letters, 61(5), 666–675. https://doi.org/https://doi.org/10.1016/j.sysconle.2012.03.002
- Liu, K., Fridman, E., & Hetel, L. (2015). Networked control systems in the presence of scheduling protocols and communication delays. SIAM Journal on Control and Optimization, 53(4), 1768–1788. https://doi.org/https://doi.org/10.1137/140980570
- Liu, K., Fridman, E., Hetel, L., & Richard, J. (2011). Sampled-data stabilization via Round-Robin scheduling: A direct Lyapunov-Krasovskii approach. In Proceedings of the 18th IFAC World Congress (pp. 1459–1464). IFAC.
- Liu, K., Fridman, E., & Johansson, K. H. (2015). Networked control with stochastic scheduling. IEEE Transactions on Automatic Control, 61(11), 3071–3076. https://doi.org/https://doi.org/10.1109/TAC.9
- Liu, K., Fridman, E., Johansson, K. H., & Xia, Y. (2016). Quantized control under Round-Robin communication protocol. IEEE Transactions on Industrial Electronics, 63(7), 4461–4471. https://doi.org/https://doi.org/10.1109/TIE.2016.2539259
- Liu, K., Guo, H., Zhang, Q., & Xia, Y. (2020). Distributed secure filtering for discrete-time systems under Round-Robin protocol and deception attacks. IEEE Transactions on Cybernetics, 50(8), 3571–3580. https://doi.org/https://doi.org/10.1109/TCYB.6221036
- Liu, S., Hou, Z., Zhang, X., & Ji, H. (2020). Model-free adaptive control method for a class of unknown MIMO systems with measurement noise and application to quadrotor aircraft. IET Control Theory & Applications, 14(15), 2084–2096. https://doi.org/https://doi.org/10.1049/cth2.v14.15
- Liu, K., Seuret, A., Fridman, E., & Xia, Y. (2018). Improved stability conditions for discrete-time systems under dynamic network protocols. International Journal of Robust and Nonlinear Control, 28(15), 4479–4499.https://doi.org/https://doi.org/10.1002/rnc.4247
- Liu, S., Wang, Z., Chen, Y., & Wei, G. (2020). Protocol-based unscented Kalman filtering in the presence of stochastic uncertainties. IEEE Transactions on Automatic Control, 65(3), 1303–1309. https://doi.org/https://doi.org/10.1109/TAC.9
- Liu, S., Wang, Z., Hu, J., & Wei, G. (2020). Protocol-based extended Kalman filtering with quantization effects: the Round-Robin case. International Journal of Robust and Nonlinear Control, 30, 7927–7946. https://doi.org/https://doi.org/10.1002/rnc.v30.18
- Liu, K.-Z., Wang, R., & Li, Y. (2016). Observer design for nonlinear networked control systems with variable transmission delays and protocols based on a hybrid system technique. Neurocomputing, 173, 2115–2120. https://doi.org/https://doi.org/10.1016/j.neucom.2015.10.058
- Liu, S., Wang, Z., Wang, L., & Wei, G. (2018). On quantized H∞ filtering for multi-rate systems under stochastic communication protocols: The finite-horizon case. Information Sciences, 456, 211–223. https://doi.org/https://doi.org/10.1016/j.ins.2018.02.050
- Liu, A., Zhang, W.-A., Yu, L., Liu, S., & Chen, M. Z. Q. (2015). New results on stabilization of networked control systems with packet disordering. Automatica, 52, 255–259. https://doi.org/https://doi.org/10.1016/j.automatica.2014.12.006
- Long, Y., Park, J. H., & Ye, D. (2020). Frequency-dependent fault detection for networked systems under uniform quantization and try-once-discard protocol. International Journal of Robust and Nonlinear Control, 30(2), 787–803. https://doi.org/https://doi.org/10.1002/rnc.v30.2
- Long, Y., & Yang, G.-H. (2014). Fault detection and isolation for networked control systems with finite frequency specifications. International Journal of Robust and Nonlinear Control, 24(3), 495–514. https://doi.org/https://doi.org/10.1002/rnc.2899
- Long, Y., & Yang, G.-H. (2015). Fault detection filter design for stochastic networked control systems. International Journal of Robust and Nonlinear Control, 25(3), 443–460. https://doi.org/https://doi.org/10.1002/rnc.v25.3
- Lu, R., Peng, H., Liu, S., Xu, Y., & Li, X.-M. (2017). Reliable l2- l∞ filtering for fuzzy Markov stochastic systems with sensor failures and packet dropouts. IET Control Theory & Applications, 11(14), 2195–2203. https://doi.org/https://doi.org/10.1049/cth2.v11.14
- Luo, Y., Wang, Z., Wei, G., & Alsaadi, F. E. (2017). H∞ fuzzy fault detection for uncertain 2-D systems under Round-Robin scheduling protocol. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 47(8), 2172–2184. https://doi.org/https://doi.org/10.1109/TSMC.2016.2632043
- Luo, Y., Wang, Z., & Wei, G. (2017). Fault detection for fuzzy systems with multiplicative noises under periodic communication protocols. IEEE Transactions on Fuzzy Systems, 26(4), 2384–2395. https://doi.org/https://doi.org/10.1109/TFUZZ.2017.2774193
- Mao, J., Ding, D., Wei, G., & Liu, H. (2019). Networked recursive filtering for time-delayed nonlinear stochastic systems with uniform quantisation under Round-Robin protocol. International Journal of Systems Science, 50(4), 871–884. https://doi.org/https://doi.org/10.1080/00207721.2019.1586002
- Nešić, D., & Teel, A. R. (2004). Input-output stability properties of networked control systems. IEEE Transactions on Automatic Control, 49(10), 1650–1667. https://doi.org/https://doi.org/10.1109/TAC.2004.835360
- Peng, C., & Han, Q.-L. (2016). On designing a novel self-triggered sampling scheme for networked control systems with data losses and communication delays. IEEE Transactions on Industrial Electronics, 63(2), 1239–1248. https://doi.org/https://doi.org/10.1109/TIE.2015.2504044
- Peng, C., & Yang, T. C. (2013). Event-triggered communication and H∞ control co-design for networked control systems. Automatica, 49(5), 1326–1332. https://doi.org/https://doi.org/10.1016/j.automatica.2013.01.038
- Postoyan, R., van de Wouw, N., Nešić, D., & Heemels, W. P. M. H. (2014). Tracking control for nonlinear networked control systems. IEEE Transactions on Automatic Control, 59(6), 1539–1554.https://doi.org/https://doi.org/10.1109/TAC.2014.2308598
- Rao, H., Xu, Y., Zhang, B., & Yao, D. (2018). Robust estimator design for periodic neural networks with polytopic uncertain weight matrices and randomly occurred sensor nonlinearities. IET Control Theory & Applications, 12(9), 1299–1305. https://doi.org/https://doi.org/10.1049/cth2.v12.9
- Ren, W., Sun, S., Huo, F., & Lu, F. (2020). Nonfragile H∞ fault detection for fuzzy discrete systems under stochastic communication protocol. Optimal Control Applications & Methods, 42, 261–278. https://doi.org/https://doi.org/10.1002/oca.v42.1
- Ren, W., & Xiong, J. (2020). Tracking control of nonlinear networked and quantized control systems with communication delays. IEEE Transactions on Automatic Control, 65(8), 3685–3692. https://doi.org/https://doi.org/10.1109/TAC.9
- Schenato, L. (2009). To zero or to hold control inputs with lossy links? IEEE Transactions on Automatic Control, 54(5), 1093–1099. https://doi.org/https://doi.org/10.1109/TAC.2008.2010999
- Shen, H., Huo, S., Cao, J., & Huang, T. (2019). Generalized state estimation for Markovian coupled networks under Round-Robin protocol and redundant channels. IEEE Transactions on Cybernetics, 49(4), 1292–1391. https://doi.org/https://doi.org/10.1109/TCYB.6221036
- Shen, H., Men, Y., Cao, J., & Park, J. H. (2020). H∞ filtering for fuzzy jumping genetic regulatory networks with Round-Robin protocol: A hidden-Markov-model-based approach. IEEE Transactions on Fuzzy Systems, 28(1), 112–121. https://doi.org/https://doi.org/10.1109/TFUZZ.91
- Shen, H., Men, Y., Wu, Z.-G., Cao, J., & Lu, G. (2019). Network-based quantized control for fuzzy singularly perturbed semi-Markov jump systems and its application. IEEE Transactions on Circuits and Systems I: Regular Papers, 66(3), 1130–1140. https://doi.org/https://doi.org/10.1109/TCSI.2018.2876937
- Shen, L., Niu, Y., & Gao, M. (2019). Distributed resilient filtering for time-varying systems over sensor networks subject to Round-Robin/stochastic protocol. ISA Transactions, 87, 55–67. https://doi.org/https://doi.org/10.1016/j.isatra.2018.11.012
- Shen, L., Niu, Y., Zou, L., Liu, Y., & Alsaadi, F. E. (2018). Finite-horizon state estimation for time-varying complex networks with random coupling strengths under Round-Robin protocol. Journal of the Franklin Institute, 355(15), 7417–7442. https://doi.org/https://doi.org/10.1016/j.jfranklin.2018.07.026
- Shen, Y., Wang, Z., Shen, B., Alsaadi, F. E., & Alsaadi, F. E. (2020b). Fusion estimation for multi-rate linear repetitive processes under weighted try-once-discard protocol. Information Fusion, 55, 281–291. https://doi.org/https://doi.org/10.1016/j.inffus.2019.08.013
- Shen, Y., Wang, Z., Shen, B., & Alsaadi, F. E. (2020a). H∞ filtering for multi-rate multi-sensor systems with randomly occurring sensor saturations under the p-persistent CSMA protocol. IET Control Theory & Applications, 14(10), 1255–1265. https://doi.org/https://doi.org/10.1049/cth2.v14.10
- Shen, B., Wang, Z., & Tan, H. (2018). Guaranteed cost control for uncertain nonlinear systems with mixed time-delays: The discrete-time case. European Journal of Control, 40, 62–67. https://doi.org/https://doi.org/10.1016/j.ejcon.2017.11.006
- Shen, B., Wang, Z., Wang, D., & Liu, H. (2020). Distributed state-saturated recursive filtering over sensor networks under Round-Robin protocol. IEEE Transactions on Cybernetics, 50(8), 3605–3615. https://doi.org/https://doi.org/10.1109/TCYB.6221036
- Shi, Y., & Peng, X. (2020). Fault detection filters design of polytopic uncertain discrete-time singular Markovian jump systems with time-varying delays. Journal of the Franklin Institute, 357(11), 7343–7367. https://doi.org/https://doi.org/10.1016/j.jfranklin.2020.04.058
- Song, J., Han, F., Fu, H., & Liu, H. (2019). Finite-horizon distributed H∞-consensus control of time-varying multi-agent systems with Round-Robin protocol. Neurocomputing, 364, 219–226. https://doi.org/https://doi.org/10.1016/j.neucom.2019.07.013
- Song, X., Wang, M., Ahn, C. K., & Song, S. (2020). Finite-time H∞ asynchronous control for nonlinear Markov jump distributed parameter systems via quantized fuzzy output-feedback approach. IEEE Transactions on Cybernetics, 50(9), 4098–4109. https://doi.org/https://doi.org/10.1109/TCYB.6221036
- Song, Y., Wang, Z., Ding, D., & Wei, G. (2019). Robust H2/H∞ model predictive control for linear systems with polytopic uncertainties under weighted MEF-TOD protocol. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 49(7), 1470–1481. https://doi.org/https://doi.org/10.1109/TSMC.6221021
- Song, J., Wang, Z., & Niu, Y. (2019). On H∞ sliding mode control under stochastic communication protocol. IEEE Transactions on Automatic Control, 64(5), 2174–2181. https://doi.org/https://doi.org/10.1109/TAC.9
- Song, X., Wang, M., Song, S., & Lu, J. (2020). Event-triggered reliable H∞ control for a class of nonlinear distributed parameter systems within a finite-time interval. Journal of the Franklin Institute, 357(16), 11368–11393. https://doi.org/https://doi.org/10.1016/j.jfranklin.2019.06.027
- Sun, X.-M., Liu, G.-P., Wang, W., & Rees, D. (2011). L2-gain of systems with input delays and controller temporary failure: zero-order hold model. IEEE Transactions on Control Systems Technology, 19(3), 699–706. https://doi.org/https://doi.org/10.1109/TCST.2010.2050320
- Sun, X.-M., Liu, K.-Z., Wen, C., & Wang, W. (2016). Predictive control of nonlinear continuous networked control systems with large time-varying transmission delays and transmission protocols. Automatica, 64, 76–85. https://doi.org/https://doi.org/10.1016/j.automatica.2015.11.001
- Tabbara, M., & Nešić, D. (2008). Input-output stability of networked control systems with stochastic protocols and channels. IEEE Transactions on Automatic Control, 53(5), 1160–1175. https://doi.org/https://doi.org/10.1109/TAC.2008.923691
- Tabbara, M., Nešić, D., & Teel, A. R. (2007). Stability of wireless and wireline networked control systems. IEEE Transactions on Automatic Control, 52(9), 1615–1630. https://doi.org/https://doi.org/10.1109/TAC.2007.904473
- Tabuada, P. (2007). Event-triggered real-time scheduling of stabilizing control tasks. IEEE Transactions on Automatic Control, 52(9), 1680–1685. https://doi.org/https://doi.org/10.1109/TAC.2007.904277
- Ugrinovskii, V., & Fridman, E. (2014). A Round-Robin type protocol for distributed estimation with H∞ consensus. Systems & Control Letters, 69, 103–110. https://doi.org/https://doi.org/10.1016/j.sysconle.2014.05.001
- Walsh, G. C., & Ye, H. (2001). Scheduling of networked control systems. IEEE Control Systems Magazine, 21(1), 57–65. https://doi.org/https://doi.org/10.1109/37.898792
- Walsh, G. C., Ye, H., & Bushbell, L. G. (2002). Stability analysis of networked control systems. IEEE Transactions on Control Systems Technology, 10(3), 438–446. https://doi.org/https://doi.org/10.1109/87.998034
- Wan, X., Wang, Z., Han, Q.-L., & Wu, M. (2019). A recursive approach to quantized H∞ state estimation for genetic regulatory networks under stochastic communication protocols. IEEE Transactions on Neural Networks and Learning Systems, 30(9), 2840–2852. https://doi.org/https://doi.org/10.1109/TNNLS.5962385
- Wan, X., Wang, Z., Wu, M., & Liu, X. (2019). H∞ state estimation for discrete-time nonlinear singularly perturbed complex networks under the Round-Robin protocol. IEEE Transactions on Neural Networks and Learning Systems, 30(2), 415–426. https://doi.org/https://doi.org/10.1109/TNNLS.2018.2839020
- Wang, F., Chen, B., Lin, C., Zhang, J., & Meng, X. (2018). Adaptive neural network finite-time output feedback control of quantized nonlinear systems. IEEE Transactions on Cybernetics, 48(6), 1839–1848. https://doi.org/https://doi.org/10.1109/TCYB.2017.2715980
- Wang, Y., Ding, S. X., Xu, D., & Shen, B. (2014). An H∞ fault estimation scheme of wireless networked control systems for industrial real-time applications. IEEE Transactions on Control Systems Technology, 22(6), 2073–2086. https://doi.org/https://doi.org/10.1109/TCST.2014.2305393
- Wang, W., Nešić, D., & Postoyan, R. (2015). Emulation-based stabilization of networked control systems implemented on FlexRay. Automatica, 59, 73–83. https://doi.org/https://doi.org/10.1016/j.automatica.2015.06.010
- Wang, J., Song, Y., Wei, G., & Dong, Y. (2019). Robust model predictive control for polytopic uncertain systems with state saturation nonlinearities under Round-Robin protocol. International Journal of Robust and Nonlinear Control, 29(6), 2188–2202. https://doi.org/https://doi.org/10.1002/rnc.v29.7
- Wang, J., Song, Y., & Wei, G. (2019). Dynamic output-feedback RMPC for systems with polytopic uncertainties under Round-Robin protocol. Journal of the Franklin Institute, 356(4), 2421–2439. https://doi.org/https://doi.org/10.1016/j.jfranklin.2018.10.035
- Wang, D., Wang, Z., Shen, B., & Li, Q. (2019). H∞ finite-horizon filtering for complex networks with state saturations: The weighted try-once-discard protocol. International Journal of Robust Nonlinear Control, 29(7), 2096–2111. https://doi.org/https://doi.org/10.1002/rnc.v29.7
- Wang, Z.-P., & Wum, H.-N. (2017). H∞ sampled-data fuzzy control for non-linear parabolic distributed parameter systems with control inputs missing. IET Control Theory & Applications, 11(10), 1530–1541. https://doi.org/https://doi.org/10.1049/cth2.v11.10
- Wang, Y.-W., Zhang, W.-A., Dong, H., & Zhu, J.-W. (2018). Generalized extended state observer based control for networked interconnected systems with delays. Asian Journal of Control, 20(3), 1253–1262. https://doi.org/https://doi.org/10.1002/asjc.v20.3
- Wang, F., Zhang, F., Zhou, S., & Huang, Y. (2019). Neural network-based finite-time control of quantized stochastic nonlinear systems. Neurocomputing, 362, 195–202. https://doi.org/https://doi.org/10.1016/j.neucom.2019.06.060
- Xu, Y., Lu, R., Shi, P., Li, H., & Xie, S. (2018). Finite-time distributed state estimation over sensor networks with Round-Robin protocol and fading channels. IEEE Transactions on Cybernetics, 48(1), 336–345. https://doi.org/https://doi.org/10.1109/TCYB.2016.2635122
- Xu, Y., Su, H., Pan, Y., Wu, Z., & Xu, W. (2013). Stability analysis of networked control systems with Round-Robin scheduling and packet dropouts. Journal of the Franklin Institute, 350(8), 2013–2027. https://doi.org/https://doi.org/10.1016/j.jfranklin.2013.05.024
- Yang, H., & Yin, S. (2019). Actuator and sensor fault estimation for tme-delay Markov jump systems with application to wheeled mobile manipulators. IEEE Transactions on Industrial Informatics, 16(5), 3222–3232. https://doi.org/https://doi.org/10.1109/TII.9424
- Yuan, Y., Shi, M., Guo, L., & Yang, H. (2019). A resilient consensus strategy of near-optimal control for state-saturated multiagent systems with round-robin protocol. International Journal of Robust and Nonlinear Control, 29(10), 3200–3216. https://doi.org/https://doi.org/10.1002/rnc.v29.10
- Yuan, Y., Wang, Z., Zhang, P., & Liu, H. (2019). Near-optimal resilient control strategy design for state-saturated networked systems under stochastic communication protocol. IEEE Transactions on Cybernetics, 49(8), 3155–3167. https://doi.org/https://doi.org/10.1109/TCYB.6221036
- Yuan, Y., Zhang, P., Wang, Z., & Chen, Y. (2020). Noncooperative event-triggered control strategy design with Round-Robin protocol: Applications to load frequency control of circuit systems. IEEE Transactions on Industrial Electronics, 67(3), 2155–2166. https://doi.org/https://doi.org/10.1109/TIE.41
- Zhang, W., Branicky, M. S., & Phillips, S. M. (2001). Stability of networked control systems. IEEE Control Systems Magazine, 21(1), 84–99. https://doi.org/https://doi.org/10.1109/37.898794
- Zhang, L., Gao, H., & Kaynak, O. (2013). Network-induced constraints in networked control systems-a survey. IEEE Transactions on Industrial Informatics, 9(1), 403–416. https://doi.org/https://doi.org/10.1109/TII.2012.2219540
- Zhang, X.-M., Han, Q.-L., Ge, X., Ding, D., Ding, L., Yue, D., & Peng, C. (2019). Networked control systems: A survey of trends and techniques. IEEE/CAA Journal of Automatica Sinica, 7, 1–17. https://doi.org/https://doi.org/10.1109/JAS.2019.1911651
- Zhang, X.-M., Han, Q.-L., & Ge, X. (2018). A novel finite-sum inequality-based method for robust H∞ control of uncertain discrete-time Takagi–Sugeno fuzzy systems with interval-like time-varying delays. IEEE Transactions on Cybernetics, 48(9), 2569–2582. https://doi.org/https://doi.org/10.1109/TCYB.6221036
- Zhang, X.-M., Han, Q.-L., & Yu, X. (2016). Survey on recent advances in networked control systems. IEEE Transactions on Industrial Informatics, 12(5), 1740–1752. https://doi.org/https://doi.org/10.1109/TII.2015.2506545
- Zhang, X.-M., Han, Q.-L., & Zhang, B.-L. (2017). An overview and deep investigation on sampled-data-based event-triggered control and filtering for networked systems. IEEE Transactions on Industrial Informatics, 13(1), 4–16. https://doi.org/https://doi.org/10.1109/TII.2016.2607150
- Zhang, H., Hu, J., Liu, H., Yu, X., & Liu, F. (2019). Recursive state estimation for time-varying complex networks subject to missing measurements and stochastic inner coupling under random access protocol. Neurocomputing, 346, 49–57. https://doi.org/https://doi.org/10.1016/j.neucom.2018.07.086
- Zhang, J., & Peng, C. (2019). Networked H∞ filtering under a weighted TOD protocol. Automatica, 107, 333–341. https://doi.org/https://doi.org/10.1016/j.automatica.2019.05.064
- Zhang, J., Peng, C., Fei, M.-R., & Tian, Y.-C. (2017). Output feedback control of networked systems with a stochastic communication protocol. Journal of the Franklin Institute, 354(9), 3838–3853. https://doi.org/https://doi.org/10.1016/j.jfranklin.2016.02.009
- Zhang, L., Shi, Y., Chen, T., & Huang, B. (2005). A new method for stabilization of networked control systems with random delays. IEEE Transactions on Automatic Control, 50(8), 1177–1181. https://doi.org/https://doi.org/10.1109/TAC.2005.852550
- Zhang, W., Xu, D., Jiang, B., & Pan, T. (2021). Prescribed performance based model-free adaptive slidingmode constrained control for a class of nonlinear systems. Information Sciences, 544, 97–116. https://doi.org/https://doi.org/10.1016/j.ins.2020.06.061
- Zhang, W., Yu, L., & Feng, G. (2015). Stabilization of linear discrete-time networked control systems via protocol and controller co-design. International Journal of Robust and Nonlinear Control, 25(16), 3072–3085. https://doi.org/https://doi.org/10.1002/rnc.3248
- Zhang, F., Zhang, Q., & Li, J. (2018). Networked control for T-S fuzzy descriptor systems with network-induced delay and packet disordering. Neurocomputing, 275, 2264–2278. https://doi.org/https://doi.org/10.1016/j.neucom.2017.11.007
- Zhao, H., Niu, Y., & Jia, T. (2020). Security control of cyber-physical switched systems under Round-Robin protocol: Input-to-state stability in probability. Information Sciences, 508, 121–134. https://doi.org/https://doi.org/10.1016/j.ins.2019.08.056
- Zhao, Z., Wang, Z., Zou, L., & Wang, Z. (2018). Finite-horizon H∞ state estimation for artificial neural networks with component-based distributed delays and stochastic protocol. Neurocomputing, 321, 169–177. https://doi.org/https://doi.org/10.1016/j.neucom.2018.08.031
- Zhou, C., Du, M., & Chen, Q. (2012). Co-design of dynamic scheduling and H∞ control for networked control systems. Applied Mathematics and Computation, 218(21), 10767–10775. https://doi.org/https://doi.org/10.1016/j.amc.2012.04.035
- Zhou, C., Lu, H., Ren, J., & Chen, Q. (2015). Co-design of dynamic scheduling and quantized control for networked control systems. Journal of the Franklin Institute, 352(10), 3988–4003. https://doi.org/https://doi.org/10.1016/j.jfranklin.2015.05.043
- Zhou, L., & Wei, Y. (2015). Stability analysis of networked control systems based on Lp properties. International Journal of Control, Automation, and Systems, 13(2), 390–397. https://doi.org/https://doi.org/10.1007/s12555-014-0092-6
- Zhu, C., Guo, G., Yang, B., & Wang, Z. (2015). Networked optimal control with random medium access protocol and packet dropouts. Mathematical Problems in Engineering, 2015, 105416.https://doi.org/https://doi.org/10.1155/2015/105416
- Zhu, K., Song, Y., & Ding, D. (2018). Resilient RMPC for polytopic uncertain systems under TOD protocol: A switched system approach. International Journal of Robust and Nonlinear Control, 28(16), 5103–5117. https://doi.org/https://doi.org/10.1002/rnc.v28.16
- Zhu, K., Song, Y., Ding, D., Wei, G., & Liu, H. (2018). Robust MPC under event-triggered mechanism and Round-Robin protocol: An average dwell-time approach. Information Sciences, 457-458, 126–140. https://doi.org/https://doi.org/10.1016/j.ins.2018.04.052
- Zou, L., Wang, Z., Gao, H., & Alsaadi, F. E. (2017). Finite-horizon H∞ consensus control of time-varying multiagent systems with stochastic communication protocol. IEEE Transactions on Cybernetics, 47(8), 1830–1840. https://doi.org/https://doi.org/10.1109/TCYB.2017.2685425
- Zou, L., Wang, Z., & Gao, H. (2016a). Observer-based H∞ control of networked systems with stochastic communication protocol: The finite-horizon case. Automatica, 63, 366–373. https://doi.org/https://doi.org/10.1016/j.automatica.2015.10.045
- Zou, L., Wang, Z., & Gao, H. (2016b). Set-membership filtering for time-varying systems with mixed time-delays under Round-Robin and weighted try-once-discard protocols. Automatica, 74, 341–348. https://doi.org/https://doi.org/10.1016/j.automatica.2016.07.025
- Zou, L., Wang, Z., Gao, H., & Liu, X. (2017). State estimation for discrete-time dynamical networks with time-varying delays and stochastic disturbances under the Round-Robin protocol. IEEE Transactions on Neural Networks and Learning Systems, 28(5), 1139–1151. https://doi.org/https://doi.org/10.1109/TNNLS.5962385
- Zou, L., Wang, Z., Han, Q.-L., & Zhou, D. (2017). Ultimate boundedness control for networked systems with Try-Once-Discard protocol and uniform quantization effects. IEEE Transactions on Automatic Control, 62(12), 6582–6588. https://doi.org/https://doi.org/10.1109/TAC.2017.2713353
- Zou, L., Wang, Z., Han, Q.-L., & Zhou, D. (2019a). Recursive filtering for time-varying systems with random access protocol. IEEE Transactions on Automatic Control, 64(12), 720–727. https://doi.org/https://doi.org/10.1109/TAC.9
- Zou, L., Wang, Z., Han, Q.-L., & Zhou, D. (2019b). Moving horizon estimation for networked time-delay systems under Round-Robin protocol. IEEE Transactions on Automatic Control, 64(12), 5191–5198. https://doi.org/https://doi.org/10.1109/TAC.9
- Zou, L., Wang, Z., Han, Q.-L., & Zhou, D. (2019c). Moving horizon estimation for networked nonlinear systems with random access protocol. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 51, 2937–2948. https://doi.org/https://doi.org/10.1109/TSMC.6221021
- Zou, L., Wang, Z., Han, Q.-L., & Zhou, D. (2019d). Full information estimation for time-varying systems subject to Round-Robin scheduling: A recursive filter approach. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 51, 1904–1916. https://doi.org/https://doi.org/10.1109/TSMC.6221021
- Zou, L., Wang, Z., Hu, J., & Gao, H. (2017). On H∞ finite-horizon filtering under stochastic protocol: Dealing with high-rate communication networks. IEEE Transactions on Automatic Control, 62(9), 4884–4890. https://doi.org/https://doi.org/10.1109/TAC.2017.2691310
- Zou, L., Wen, T., Wang, Z., Chen, L., & Roberts, C. (2019). State estimation for communication-based train control systems with CSMA protocol. IEEE Transactions on Intelligent Transportation Systems, 20(3), 843–854. https://doi.org/https://doi.org/10.1109/TITS.2018.2835655