?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.
?Mathematical formulae have been encoded as MathML and are displayed in this HTML version using MathJax in order to improve their display. Uncheck the box to turn MathJax off. This feature requires Javascript. Click on a formula to zoom.Abstract
Several modern vehicles provide the option to select a driving mode. However, the literature contains no empirical studies that investigate how driving modes affect the vehicle's dynamic behaviour in regular on-road driving. We examined for which CAN-bus signals the differences between Renault's Multi-Sense® comfort and sport modes are most apparent. We gathered data on a 26.3 km route containing a rural and highway section. A single person drove the route four times in comfort mode and four times in sport mode. By statistically analysing and ordering 887 CAN-bus signals, we found strong differences between the two modes for rear-wheel angle, engine torque, longitudinal acceleration, and vertical motion. Parameter identification of a quarter car model identified a 3.5 times higher damping coefficient for the sport mode compared to the comfort mode. Due to four wheel steering, compared to the comfort mode, the sport mode yielded a higher lateral acceleration and yaw rate for a given steering wheel angle and driving speed. In conclusion, this study provides quantitative insight into the extent to which the Multi-Sense driving modes impact the vehicle's lateral, longitudinal, and vertical dynamic behaviour. The results and the analysis methods help guide future driving mode designs.
1. Introduction
1.1. Driving modes
In recent years, cars have evolved from vehicles having invariable characteristics to vehicles of which the dynamic characteristics can be changed using active springs, dampers, drivetrain, and steering systems [Citation1]. These active dynamic components aim to improve comfort (e.g., by reducing vibrations in vehicle’s body [Citation2] and stability [Citation3–5]). On top of this, some vehicle models offer the option to alter the parameters of the active dynamic components by selecting different driving modes (e.g., sport or comfort mode). These driving modes intend to offer distinct ride experiences, e.g. a comfort mode for a ‘smooth and silent ride’ versus a sport mode for a ‘shaky adventurous ride’ [Citation6–8].
Nowadays, many car brands offer the driver the possibility to manually select one of the three basic driving modes such as Eco, Comfort, or Sport. One particular system, highlighted in this paper, is Renault’s Multi-Sense. The Multi-Sense modes (i.e., comfort, sport, eco, neutral) impact not only parameters concerning the vehicle dynamics (e.g. rear-wheel steering, drivetrain, and dampers), but also cockpit ambience (e.g., colour of ambient lighting, dashboard interface) [Citation9].
A number of studies have examined the potential of driving modes in areas such as fuel/energy management [Citation10–12], chassis control [Citation13–15], and adaptation to personal driving styles [Citation16]. The existing literature focuses on the functionality of individual active vehicle components, where a distinction can be made between active components that affect longitudinal/lateral (Section 1.2) and vertical vehicle dynamics (Section 1.3). However, to the best of our knowledge, no empirical studies in the current literature investigate differences in vehicle behaviour as a function of different driving modes.
1.2. Active lateral and longitudinal vehicle dynamics
The characteristics of the steering system are known to influence the subjective steering feel and comfort [Citation17–19] as well as lane-keeping performance [Citation20,Citation21]. An important parameter is the steering ratio, which is the ratio between the driver’s steering wheel angle and the front wheel angle. In most conventional cars, the steering ratio and turning radius are mechanically linked and invariant [Citation22]. Invariant steering systems allow drivers to develop a reliable mental model [Citation23]. However, invariant systems cannot accommodate differences in desired steering responsiveness for different driving situations. For example, at high speed (e.g., highway driving), a low-gain steering system may be preferred as the driver requires small steering angles and high accuracy. At low speed, accuracy and stability are less critical, and a high-gain steering system may be preferred to accommodate a parking manoeuvre [Citation4].
Various active steering systems exist, such as four-wheel steering (4WS), active front steering, steer-by-wire, and direct yaw control [Citation7,Citation24]. These systems enable functionalities such as speed-dependent change of vehicle agility (faster lateral movement of the vehicle with the same steering input), manoeuvrability (change in turning radius), steering effort (lower steering torques to achieve a similar lateral response), and stability (active safety by superposition of the steering angles or rear wheel angle in case of 4WS) [Citation3,Citation25–28].
Four-wheel steering enables active rear-wheel steering in addition to the front axle [Citation29]. With 4WS, at low speed, the rear wheels countersteer the front wheels (Figure a), and at high speed, they are turned in the same direction (Figure b). Countersteering shortens the virtual wheelbase (see Figure b), resulting in a smaller turning radius compared to no 4WS, whereas parallel steering increases the virtual wheelbase (see Figure a). Thus, for a constant steering wheel angle and constant speed, countersteering results in a higher steady-state yaw rate and lateral acceleration compared to parallel steering. Additionally, parallel steering results in a faster build-up of the lateral acceleration towards a target value as compared to regular front steering [Citation30–34]. For parallel steering, the transfer function of steering wheel angle to lateral acceleration has a low phase shift as the vehicle can generate rear-wheel slip angles without the need for a vehicle sideslip angle, reducing the time required to reach a steady-state condition.
Figure 1. Steering configurations: (a) Parallel steering; (b) Counter steering. For a constant front steering angle, the turn radius is smaller for countersteering as compared to parallel steering [Citation31].
![Figure 1. Steering configurations: (a) Parallel steering; (b) Counter steering. For a constant front steering angle, the turn radius is smaller for countersteering as compared to parallel steering [Citation31].](/cms/asset/be193c8a-5463-4ab1-9dcf-63b4332593a4/nvsd_a_1693049_f0001_oc.jpg)
Active longitudinal vehicle dynamics components include engine characteristics, throttle response, and gear switching control [Citation35].
1.3. Active vertical vehicle dynamics
The suspension system includes the springs, dampers, and linkages that separate the car body (sprung mass) from the wheel assembly (unsprung mass). It has the function to improve the comfort of the vehicle occupants (i.e., reduce road vibrations in the car body) and to provide desirable handling specifications and contact between the tyres and road surface [Citation36,Citation37]. Where soft components, in general, improve ride comfort, a hard suspension improves handling specifications [Citation38–41]. Passive suspension systems can only offer a compromise between these conflicting criteria [Citation42,Citation43], resulting in sub-optimal vehicle characteristics.
Active suspension components enable online changes of the stiffness and damping settings. Current commercialised vehicles utilise variable damping in combination with passive springs but typically do not use variable stiffness, a concept that is currently in a research phase [Citation36,Citation44,Citation45]. Besides variable damping and stiffness, active suspension mechanisms can apply control strategies to minimise the impact of braking and cornering on the body (active body control, active roll control) and to compensate for road irregularities [Citation30,Citation46,Citation47]. The performance of these components strongly depends on the implemented controller design (e.g., [Citation37,Citation48–51]).
Driving modes could affect the functionality of these components [Citation13,Citation14]. For example, for a sport driving mode, a higher variable damping parameter could be utilised to feed more vibrations to the driver. For a comfort mode, softer damping would be used to remove these vibrations.
1.4. The need for understanding the impact of driving modes on the vehicle’s dynamic behaviour
As pointed out above, a substantial body of literature exists on the behaviour of individual active components. However, no empirical studies investigate how these individual active components are affected by driving modes. Furthermore, for actual roads, the impact of driving modes on the vehicle’s dynamic behaviour is unknown. In the present exploratory study, we aimed to quantify the vehicle’s dynamic changes between the Renault Multi-Sense comfort and sport modes. According to Renault [Citation9], the comfort mode ‘favours smooth steering’ and the sport mode ‘permits an increased responsiveness from the engine and the gearbox’. We aimed to make the dynamical effects of these modes transparent in the scientific literature. Accordingly, we gathered naturalistic driving data on a route containing a rural road and a highway road section. A single driver drove the same route four times in comfort mode and four times in sport mode. Based on logged CAN-bus data (887 signals associated with rigid body motions, steering, and powertrain responses), we investigated which vehicle state variables discriminate the two modes, and used that selection to analyse the vehicle’s longitudinal, lateral, and vertical dynamic behaviour in more detail. Changes in damping characteristics were quantified by identifying the damping coefficient in a simulation model of the suspension travel.
2. Experimental design
2.1. Test driver
One test driver (first author, male, 26 years old, eight years licensed to drive) participated in this study. In the past 12 months, the test driver drove 1–3 times a week, with a yearly mileage of about 10,000–15,000 km.
2.2. Apparatus
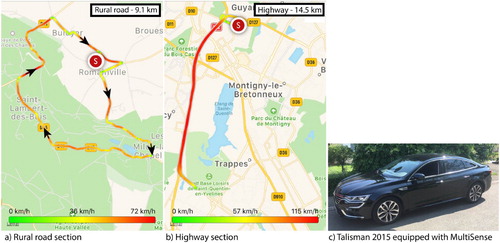
In the study, the test driver drove a 2015 Renault Talisman (Figure c) equipped with Multi-Sense and a CAN-bus for data gathering. The 887 CAN signals were recorded at frequencies ranging from 10 Hz to 100 Hz. The GPS location was recorded (sampled at 0.5 Hz) using an iPhone SE and the ‘GPS tracker’ application.
Figure 2. (a) rural road section (9.1 km), (b) highway section (14.5 km), (c) 2015 Renault Talisman equipped with Multi-Sense used in the experiment. The start/end is visualised with an S-sign, and the driven direction for the rural road is indicated with an arrow.
2.3. Road trajectory
The driver drove on roads in France (near Versailles). The route consisted of a 9.1 km long rural road section (Figure a) and a 14.5 km long highway road section (Figure b), which together are referred to as the combined route (23.6 km). The rural road section contained single-lane and two-lane sections, with very little traffic (<2 cars per drive). The highway road section included two highway exits and two entries and had an advisory speed of 110 km/h. On the highway, low-density traffic was encountered.
2.4. Procedure
The driver was given the task to drive as he normally would, and with similar average speed for both the sport and comfort modes. The driver was familiar with the roads and with both modes before the start of the experiment. The two sections were driven on two separate days: the rural road section on day one and the highway section on day two. Each road section was driven four times in sport mode and four times in comfort mode in alternating order (starting with the sport mode for the rural road on day one and starting with comfort at the highway on day two). Between each driven section, there was a 5-minute break to mitigate fatigue. Furthermore, after the first four drives (2x sport and 2x comfort) there was a one-hour long break. For the highway road, the driver performed multiple overtaking manoeuvres. The combined route took 27 min (14 min for the rural road section, and 13 min for the highway road). On both days it was a clear day with an external temperature on day one (rural road) of 19°C and on day two (highway) of 21°C. Finally, the first day there was 33 l in the fuel tank at the start of the experiment, and on day two 27 l.
2.5 Dependent measures
2.5.1. Ordering the data
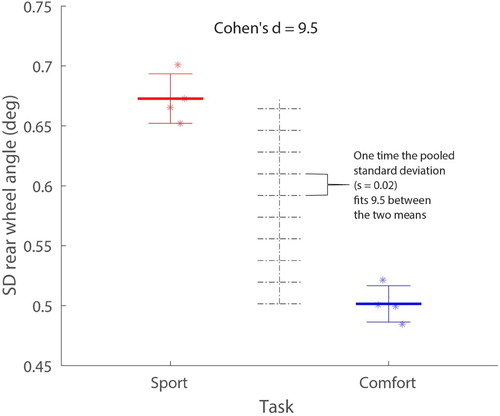
The following procedure was performed to find which measures discriminate between the comfort and sport modes. For each of the eight drives per road type (i.e., four drives in comfort mode & four drives in sport mode), we calculated for both sections (highway and rural road separately) and for all 887 CAN measures, the mean value of each of the signals, the standard deviation of each signal (a measure of variation), and the mean absolute successive difference of each signal (a measure of the amount of sample-to-sample fluctuations in the signal). Next, Cohen’s d (Equation 1, [Citation52]) was computed as a measure of effect size between the four values for the sport mode and the four values for the comfort mode for the rural road and the highway separately. Cohen’s d describes how much two samples (i.e., sport and comfort) differ from each other.
(1)
(1) With
the sample mean of the four values of a particular mode,
the pooled standard deviation, and
the standard deviation of the four values of a particular mode. An illustration of the meaning of Cohen’s d is provided in Appendix A.
2.7. Simulation model
2.7.1. Quarter car model to identify the sprung damper coefficient
A quarter car linear oscillatory model of the suspension travel [Citation53,Citation54] was used to estimate the sprung damper coefficient (), bs (bs > 0). A constraint optimisation was performed to fit the model-based suspension travel on the empirically obtained suspension travel from the highway and rural road sections, per driving mode.
Figure 3. The quarter car linear oscillatory model used to model the suspension travel (X1 – X2) for different road disturbance frequencies (D).

Table provides the meaning and value of each parameter used in the simulation model. The values for the vehicle’s sprung and unsprung mass and stiffness were obtained from Renault. These provided values yield a natural frequency for the sprung mass and unsprung mass of 1.48 and 10.30 Hz, respectively. Using the equation of motion of this system, the transfer function can be derived for the suspension travel (i.e., the difference between sprung mass distance and unsprung mass distance (X1 – X2) as a response to the road disturbance frequency input D) (Equation 2). The road disturbance frequencies D (Hz) are linearly spaced between 0.47 and 12 Hz.
(2)
(2) The power spectral density (PSD) of the suspension travel can be calculated using Equation 3.
(3)
(3) where
is the complex frequency function from Equation 2, and
is the PSD of the roughness of asphalt concrete pavement in good conditions, as a function of temporal excitation frequency (Equation 4; see [Citation39,Citation55], for a more detailed explanation).
(4)
(4) In Equation 4, a roughness coefficient
of 7.5·10−7 m was used for the rural road section, and 1.6·10−7 m for the highway section. We assumed a fixed velocity (V) of 11 m/s, and 20 m/s for respectively the rural road, and the highway, and wavenumber (N) of 2.59 (rural road) and 2.32 (highway; which is, according to [Citation55], a value for a ‘good pavement’ condition).
Table 1. Parameters used in the quarter car model. Numbers were provided by Renault. Parameter bs was estimated using our model identification process.
3. Results
3.1. Driving behaviour
Table shows no substantial differences in mean speed (<0.7 km/h), brake depression, and absolute yaw rate between the sport and comfort modes, for the combined route. For the sport mode, a substantially higher mean absolute rear-wheel angle, mean engine speed, mean gear number, mean throttle position, mean lateral acceleration, and mean longitudinal acceleration, compared to the comfort mode.
Table 2. The mean and standard deviation results of the four repetitions for the comfort and sport for the combined route, rural road, and highway.
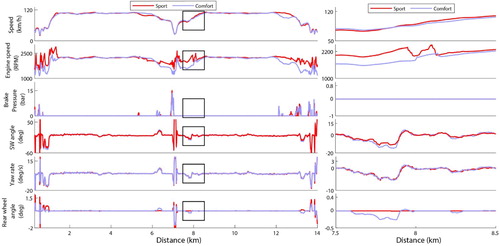
Figures and show common driving-related measures as a function of travelled distance across all repetitions for the rural road and highway, separately. From top to bottom, Figures and show among the four repetitions: (1) the mean speed, (2) the mean engine speed, (3) the mean brake pressure, (4) the mean steering wheel angle, (5) the mean yaw rate, and (6), the mean rear wheel angle for both comfort mode and sport mode. Over the entire route, no substantial difference in speed and brake pressure can be seen for the two modes. Regarding longitudinal dynamics, the engine speed was higher for sport as compared to comfort. In terms of lateral dynamics, the results show higher rear-wheel angles, but smaller steering wheel angles for the sport mode as compared to the comfort mode. No clear differences can be observed for the yaw rate. The differences in the vehicle’s vertical, lateral, and longitudinal dynamic behaviour will be analysed in more detail in Sections 3.2–3.5.
Figure 4. For the rural road section, six recorded variables averaged across four repetitions as a function of travelled distance (left) and for a selected travelled distance interval (right). From top to bottom: mean speed, mean engine speed, mean brake depression, mean steering wheel angle, mean yaw rate, and mean rear wheel angle.
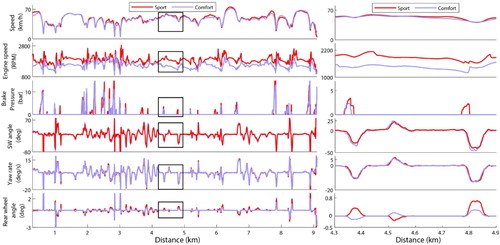
Figure 5. For the highway section, six recorded variables averaged across four repetitions as a function of travelled distance (left) and for a selected travelled distance interval (right). From top to bottom: mean speed, mean engine speed, mean brake depression, mean steering wheel angle, mean yaw rate, and mean rear wheel angle.
3.2. Most-discriminating measures between comfort and sport mode
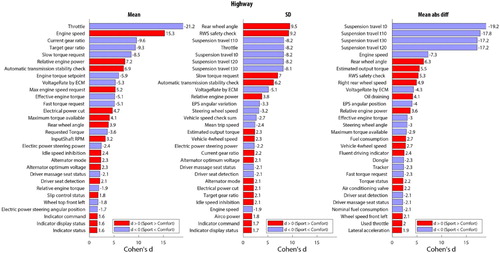
The Cohen’s d effect sizes for the 30 most-discriminating measures (i.e., largest Cohen’s d values) for the rural road and the highway are shown in Figures and , respectively. The largest differences in means occurred for engine speed (RPM), engine-torque related values, and throttle, mostly because the car drove longer at a lower gear in sport mode (see Table ), resulting in a higher available torque (Table ), and lower throttle input percentage (Table ). The largest differences in standard deviations occurred for engine speed (RPM), throttle position, and rear-wheel angle. Finally, the largest differences in high-frequency variation (i.e., the mean absolute difference) were found for the suspension travel (described in more detail in Section 3.3) and rear-wheel angle (described in more detail in Section 3.4).
Figure 6. For the rural road section: the ranking of the absolute value of Cohen’s d, that is, the 30 most discriminative measures between the sport mode and comfort mode out of 887 measures. Left: mean of the signal, Middle: standard deviation of the signal, Right: mean absolute successive difference of the signal.
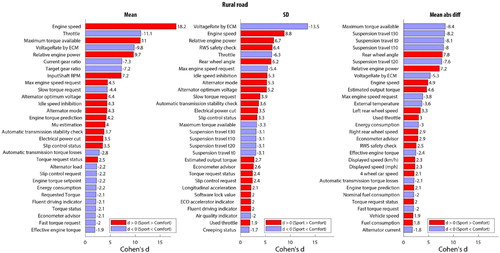
Figure 7. For the highway section: the ranking of the absolute value of Cohen’s d, that is, the 30 most discriminative measures between the sport mode and comfort mode out of 887 measures. Left: mean of the signal, Middle: standard deviation of the signal, Right: mean absolute successive difference of the signal.
3.3. Vertical dynamics
3.3.1. Power spectral density of suspension travel to identify the damping coefficient
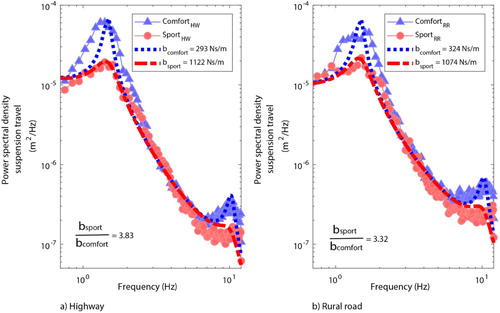
The suspension travel time response of the four repetitions, for the rural road and highway separately, were combined in one data vector and submitted to MATLAB’s p-Welch power spectral density estimator [Citation56–58]. Due to the high impact of the pavement roughness and vehicle speed on the vehicle’s oscillatory behaviour, the results were identified separately for both the highway (low pavement roughness and high speed) and rural road (high pavement roughness and low speed). The power spectral density estimate for the sport and comfort mode and the fitted quarter car model are shown in Figure . The constraint optimisation, which fitted the model-based suspension travel on the observed data, identified a 3.38× higher damper setting for sport (1585 Ns/m) than for comfort (469 Ns/m) for the highway section and a 3.32× higher damper setting for sport (1079 Ns/m) than for comfort (325 Ns/m) for the rural road section. A higher suspension travel power was found for comfort than sport around the natural frequencies of the sprung mass and unsprung mass of 1.48 and 10.30 Hz, respectively. The natural frequencies locations are identical for sport and comfort mode.
Figure 8. Power spectral density of the vibrations of the suspension travel for the highway section (a) and the rural road section.
3.4. Lateral dynamics
Figures (a) illustrate the impact of vehicle speed and steering wheel angle on the rear-wheel angle, yaw rate, and lateral acceleration. Figures (b) show the slopes of fitted linear regression lines for speed bins of 5 km/h for a combination of the combined route and the four repetitions.
Figure 9. Rear-wheel angle as a function of steering wheel angle for the sport (red) and comfort mode (blue). (a) Steering wheel angle and rear wheel angle between 20 and 30 km/h (light) and 80 and 90 km/h (dark). (b) The slope of the linear regression between steering wheel angle and rear wheel angle per 5 km/h speed bin. Results are based on the combined route and the four repetitions combined.
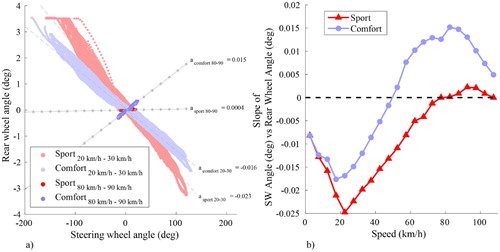
Figure 10. Yaw rate as a function of steering wheel angle for the sport (red) and comfort mode (blue). (a) Steering wheel angle and yaw rate between 20 and 30 km/h (light) and 80 and 90 km/h (dark). (b) The slope of the linear regression between steering wheel angle and yaw rate per 5 km/h speed bin. Results are based on the combined route and the four repetitions combined.
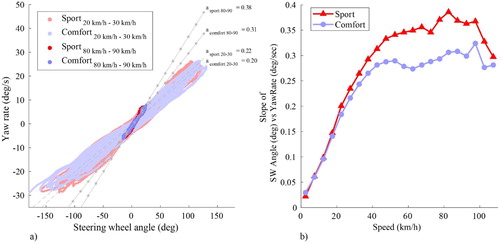
Figure 11. Lateral acceleration as a function of steering wheel angle for the sport (red) and comfort mode (blue). (a) Steering wheel angle and lateral acceleration between 20 and 30 km/h (light) and 80 and 90 km/h (dark). (b) The slope of the linear regression between steering wheel angle and lateral acceleration per 5 km/h speed bin. Results are based on the combined route and the four repetitions combined.
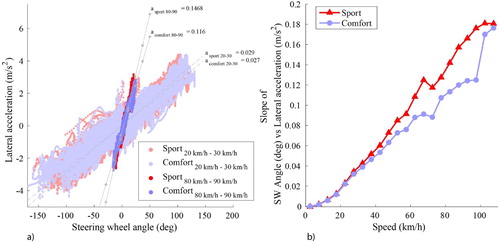
Figure a shows that between 20 and 30 km/h, more countersteering is performed for the sport than for the comfort mode, whereas for speeds between 80 and 90 km/h, more parallel steering is performed for comfort than for sport. This effect is visualised for all speeds ranges between 0 and 115 km/h in Figure b. More countersteering is executed (i.e., a stronger negative slope value of the rear wheel angle vs. steering wheel angle) for sport than compared to comfort mode for speeds between 15 and 80 km/h. Above 55 km/h parallel steering (positive slope) is exhibited for comfort mode, whereas no parallel steering is available for the sport mode.
Figure shows that higher yaw rates are obtained for sport mode than for comfort mode. The yaw rate difference is especially visible when the parallel steering strategy is executed (i.e., speeds above 55 km/h).
Figure illustrates the effect of vehicle speed on the lateral acceleration response to a steering wheel deviation. For the sport and comfort mode, the same steering wheel angle results in higher lateral accelerations when the speed becomes higher. Above 40 km/h, higher lateral accelerations are observed for the sport mode compared to the comfort mode.
3.5. Longitudinal dynamics
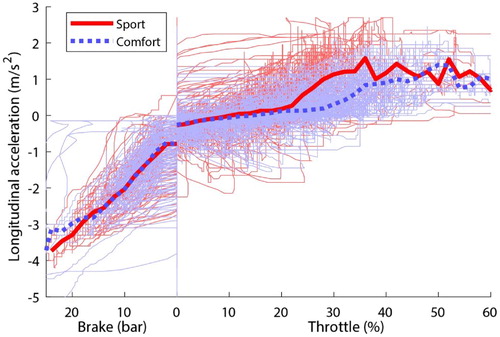
Figure shows the mean longitudinal acceleration (m/s2) as a function of brake pressure input (bar) and throttle input (%) for the comfort and sport modes for the combined route and the four repetitions combined. The results show an increased longitudinal acceleration for sport mode than for comfort mode for throttle inputs between 20% and 40%. No clear differences can be seen for the decelerations in comfort mode.
Figure 12. The raw (thin lines) and mean (thick lines) longitudinal acceleration as a function of the brake and throttle depression for the sport and comfort repetitions for the combined route.
4. Discussion
In this exploratory study, we aimed to quantify the differences in the vehicle’s dynamic behaviour between the Renault Multi-Sense sport mode and comfort mode in naturalistic driving conditions. We gathered driving data on a combined route (26.3 km) containing a rural road and a highway section, using a single driver driving the same route four times in comfort mode and four times in sport mode. The data were analysed for differences between sport and comfort mode in three steps: (1) an analysis of 11 selected measures, to analyse differences in general driving behaviour, (2) an investigation of which vehicle state variables best discriminate between the two driving modes, based on calculating the Cohen’s d effect size of metrics (mean, standard deviation, and mean absolute difference) for all 887 CAN-bus signals, and (3) a detailed analysis of the vehicle’s lateral, longitudinal and vertical dynamic behaviour for the obtained signals in step 2.
In the first set of analyses, differences between sport and comfort modes were observed in RPM, rear-wheel angles, steering angle (for large steering angles). Important for this study, no substantial difference between sport and comfort mode in mean driving speed (<0.7 km/h) was found, indicating a consistent driving speed across modes and repetitions, as was intended. Additionally, no substantial differences were found for the mean yaw rate, which is to be expected, since the same yaw rate is needed to drive the same route.
In the second set of analyses, the sorted Cohen’s d effect sizes revealed strong differences for longitudinal variables (i.e., drivetrain related signals such as engine speed, engine torque, throttle, gear ratio), lateral dynamic behaviour variables (i.e. such as rear-wheel angles), and vertical dynamic variables (i.e., such as the suspension travel). The results contained several redundancies in CAN signals with the same meaning (e.g., vehicle speed in km/h, and vehicle speed in mph), or signals that are causally related (e.g., current gear ratio, and engine speed), or are unimportant to the present study (e.g., air-conditioning power). The inclusion of unimportant measures could have been prevented by manually selecting CAN signals, but would be at the cost of a lower generality.
In the third set of analyses, differences found in longitudinal, lateral, and vertical dynamic behaviour were further analysed. The longitudinal dynamic behavioural results showed that by shifting the car into sport mode, the car initiates a more aggressive throttle response especially for throttle inputs above 20%, and remaps its gear ratios so that the car will hold onto gears longer (i.e., higher maximum torque available and more relative engine power), with higher RPMs and a lower fuel efficiency compared to comfort mode. For the first time, these results provide evidence that the Multi-Sense sport and comfort modes substantially affect longitudinal dynamic behaviour.
For lateral dynamic behaviour, the sport mode resulted in a higher mean absolute rear-wheel angle, due to a difference in rear-wheel steering present above 20 km/h (Figure ). Countersteering and parallel steering are widely proposed rear-wheel steering control strategies [Citation30,Citation31,Citation34,Citation59]. In our study, a clear speed-dependent rear-wheel steering control strategy was observed, with at lower speeds (15–80 km/h) more countersteering for sport than comfort mode, and at higher speeds (>50 km/h) parallel steering for comfort mode, and no rear-wheel steering for sport mode. For a given steering input at speeds above 40 km/h, the sport mode (which used no rear-wheel steering at high speeds), caused a higher yaw rate and a higher lateral acceleration compared to the comfort mode (which used parallel rear-wheel steering). These results are in line with literature showing that for a given steering input parallel steering results in a reduced steady-state yaw rate and reduced steady-state lateral acceleration Nalecz & Bindemann [Citation32]. Our contribution is that we showed for the first time how the four-wheel steering strategy is utilised by different driving modes.
The quarter car model identified a 3.83 times (highway) and 3.32 times (rural road) higher damper value for the sport than for the comfort mode. Therefore, when driving in sport mode, the higher value of shock absorber damping provides lower oscillatory movements at exciting frequencies approximating the resonance frequencies, whereas the amplitudes of the driver’s vertical acceleration are increased [Citation39]. The manufacturer-provided sprung, and unsprung mass and stiffness resulted in an accurate estimate of the natural frequencies (Figure ). A visual inspection of Figure shows a broadening of the natural frequencies for the empirical data, a phenomenon that is not captured by the quarter car model. This broadening could be caused by energy losses due to the non-linearity of the damping, non-static parameters (mass, stiffness, and damping changes while driving), or one of the many assumptions in the quarter car model. Indeed, many assumptions are made in the quarter car model (i.e., fixed speed, static model parameters, linear damping approximation, only one wheel modelled, vertically aligned dampers, fixed asphalt roughness, equally distributed input frequencies), resulting in inaccuracies. Nevertheless, it needs to be noted that the quarter car model is an effective model to comprehend the order of difference between the average variable damping settings of the sport and comfort mode, and is widely used to model suspension dynamics [Citation39,Citation40,Citation53].
5. Limitations and future work
Despite the 887 available CAN-bus signals, some vehicle-related signals (e.g., roll, pitch, sprung-mass acceleration, and wheel load) and driver-related signals (e.g., driver steering torque) were not part of the CAN-bus dataset. This makes it impossible, for example, to show the effect of driving mode on road holding (i.e., instantaneous wheel load) and vehicle comfort (i.e., sprung-mass vertical acceleration). For many of these signals, the effect can be deduced from the results in this paper. In this study, we investigated changes in vehicle dynamics measured by the CAN signals, using the built-in sensors of the vehicle. Future studies could add additional sensors to complement our analyses.
In this study, we used a data-driven approach to quantify the main dynamical differences between sport and comfort mode. It is, of course, true that the working mechanisms of the active components are known by Renault. However, these are merely software codes and hard to interpret. For actual roads, the impact of driving modes on the total vehicle’s dynamic behaviour was not yet documented. That is, how much driving modes affect the vehicle’s dynamic behaviour was previously unclear in the scientific literature. We aimed to make this effect transparent for the first time, and we showed, for example, for the lateral dynamics, not only the on-road control strategy (i.e., the rear wheel strategy), but also the effect of this control strategy on vehicle’s dynamical behaviour (i.e., lateral acceleration and yaw rate).
We quantified the differences in vehicle dynamics between two given driving modes. Future research could use the opposite approach, namely, to develop new driving modes based on desired vehicle dynamics. For example, the quarter car model could be used to determine to what extent the damping coefficients should be adjusted for generating a driving mode with a particular ride height characteristic. Additionally, based on collected vehicle dynamics data, it should be possible to classify driving modes. For example, based on observed front and rear wheel angles as well as observed lateral accelerations and ride height fluctuations, the current vehicle dynamic behaviour could be classified as ‘sport-like’ or ‘comfort-like’. Based on this classification, novel control strategies, such as model-predictive control techniques (e.g., [Citation60,Citation61]) could be utilised to create desired vehicle behaviours. This approach would allow for comparisons of vehicle characteristics between different vehicle brands and types.
In this study, we aimed to constrain driving style by giving the driver the task to ‘drive with the same speed’. This approach allowed for a valid comparison of the differences between the two modes, but it prevented behavioural adaptations on behalf of the driver. Previous studies have shown that changes in vehicle dynamics and assistance systems instigate driver adaptations such as driving with a higher speed or driving closer to a lead vehicle [Citation62–65]. It can be hypothesised that drivers in sport mode will adapt their driving style towards sportier behaviour. During this experiment, one vehicle and one driver were used. Future research should investigate how the results relate to different vehicles, driving modes of different car brands, and a large pool of drivers.
Finally, the impact of Multi-Sense modes on subjective driving experience is a matter of future study. Besides changes in vehicle dynamics, changes in audio-visual cues can be expected to contribute to driving experience and system acceptance. The present results and analysis methods may help guide future studies that evaluate how drivers use and experience different driving mode designs.
6. Conclusions
Before conducting this study, there was a lack of knowledge about how driving modes affect the vehicle's dynamic behaviour in normal driving conditions on real roads. In this study, we aimed to quantify the differences in vehicle dynamics between the sport and comfort mode of Renault’s Multi-Sense, by statistically analysing 887 CAN-bus signals. This study showed that during naturalistic driving:
The driving modes affect lateral dynamics due to four-wheel steering. Compared to the sport mode, the comfort mode uses less countersteering at low speeds and more parallel steering at high speeds (>50 km/h). The four-wheel steering strategy results in a higher steady-state lateral acceleration and yaw-rate for the sport mode compared to comfort mode.
Driving modes affect the longitudinal dynamics due to changes in engine settings. In the sport mode, the car has a more sensitive throttle response for throttle inputs above 20%, holds onto gears longer, and maintains a higher torque and RPMs, at the expense of lower fuel efficiency, as compared to comfort mode.
Driving modes affect the vertical dynamics due to different damping settings. An about 3.5 times higher damper coefficient was identified for the sport mode compared to the comfort mode.
Driving modes are more than a ‘gimmick’ but substantially change how the vehicle responds to the driver’s control input. Future studies are needed to investigate the impact of these changes on drivers’ behaviour, acceptance, and safety.
Acknowledgements
The authors would like to thank Barys Shyrokau for his valuable input during several meetings.
Disclosure statement
Timo Melman is employed by Renault Inc. and does his PhD research in collaboration with the Delft University of Technology and ENSTA ParisTech.
References
- Crolla DA. Vehicle dynamics—theory into practice. Proceedings of the Institution of Mechanical Engineers. Proc Inst Mech Eng, Part D: J Automobile Eng. 1996;210:83–94. doi: 10.1243/PIME_PROC_1996_210_250_02
- Rajamani R. Vehicle dynamics and control. New York: Springer Science & Business Media; 2011.
- Abe M. Vehicle dynamics and control for improving handling and active safety: from four-wheel steering to direct yaw moment control. Proc Inst Mech En, Part K: J Multi-body Dyn. 1999;213:87–101. doi: 10.1243/0954405991516688
- Reuter M, Saal A. Superimposed steering system. In: Manfred Harrer, Peter Pfeffer, editors. Steering Handbook. Cham: Springer; 2017. p. 469–492.
- Yu F, Li DF, Crolla DA. Integrated vehicle dynamics control—state-of-the art review. IEEE vehicle power and Propulsion Conference; 2008.
- Sheller M. Automotive emotions: feeling the car. Theory Cult Soc. 2004;21:221–242. doi: 10.1177/0263276404046068
- Shibahata Y. Progress and future direction of chassis control technology. Annu Rev Control. 2005;29:151–158. doi: 10.1016/j.arcontrol.2004.12.004
- Kissai M, Mouton X, Monsuez B, et al. Optimizing vehicle motion control for generating multiple sensations. IEEE Intell Veh Symp. 2018;4:928–935.
- Renault. Renault TALISMAN Driver’s handbook; 2018. https://www.renaulteurodrive.com.au/resources/handbooks/TALISMAN_ESTATE_2018.pdf.
- Chau CK, Elbassioni K, Tseng CM. Drive mode optimization and path planning for plug-in hybrid electric vehicles. IEEE Trans Intell Transp Syst. 2017;18:3421–3432. doi: 10.1109/TITS.2017.2691606
- Jeon SI, Jo ST, Park YI, et al. Multi-mode driving control of a parallel hybrid electric vehicle using driving pattern recognition. J Dyn Syst Meas Control. 2002;124:141–149. doi: 10.1115/1.1434264
- Mohd TAT, Hassan MK, Aris I, et al. Application of fuzzy logic in multi-mode driving for a battery electric vehicle energy management. Int J Adv Sci, Eng Inf Tech. 2017;7:284–290. doi: 10.18517/ijaseit.7.1.1960
- Hilgers C, Brandes J, Ilias H, et al. Active air spring suspension for greater range between adjusting for comfort and dynamic driving. ATZ Worldwide. 2009;111:12–17. doi: 10.1007/BF03225311
- Kim W, Lee J, Yoon S, et al. Development of Mando’s new continuously controlled semi-active suspension system (No. 2005-01-1721). SAE Technical Paper; 2005.
- Wimmer C, Felten J, Odenthal D. The electronic chassis of the new BMW i8–influence and characterization of driving dynamics. 5th International Munich chassis Symposium 2014; Springer Vieweg, Wiesbaden; 2014, p. 57–73.
- Jeon BW, Kim SH, Jeong D, et al. Development of smart shift and drive control system based on the personal driving style adaptation (No. 2016-01-1112). SAE Technical Paper; 2016.
- Boller A. STEERING FEEL AND STEER-BY-WIRE–steering feel in heavy trucks–a driver-oriented approach to evaluate different configurations of steering support. 7th International Munich chassis Symposium 2016; Springer Vieweg, Wiesbaden; 2017, p. 575-594.
- Pfeffer PE, Harrer M, Johnston DN. Interaction of vehicle and steering system regarding on centre handling. Veh Syst Dyn. 2008;46:413–428. doi: 10.1080/00423110701416519
- Tagesson K. Driver-centred motion control of heavy trucks [Doctoral Thesis]. Chalmers University of Technology; 2017.
- Nagai M, Koike K. Theoretical study of vehicle wandering phenomenon induced by dented road cross profile. Int J Heavy Veh Syst. 1994;1:182–194.
- Shyrokau B, De Winter J, Stroosma O, et al. The effect of steering-system linearity, simulator motion, and truck driving experience on steering of an articulated tractor-semitrailer combination. Appl Ergon. 2018;71:17–28. doi: 10.1016/j.apergo.2018.03.018
- Trzesniowski M. Steering Kinematics. In: Harrer M, Pfeffer P, editors. Steering Handbook. Cham: Springer; 2017. p. 63–90.
- Russell HE, Harbott LK, Nisky I, et al. Motor learning affects car-to-driver handover in automated vehicles. Sci Rob. 2016;1:eaah5682. doi: 10.1126/scirobotics.aah5682
- Strandroth J, Rizzi M, Olai M, et al. The effects of studded tires on fatal crashes with passenger cars and the benefits of electronic stability control (ESC) in Swedish winter driving. Accid Anal Prev. 2012;45:50–60. doi: 10.1016/j.aap.2011.11.005
- Klier W, Reimann G, Reinelt W. Concept and functionality of the active front steering system (No. 2004-21-0073). SAE Technical Paper; 2004.
- Cho W, Choi J, Kim C, et al. Unified chassis control for the improvement of agility, maneuverability, and lateral stability. IEEE Trans Veh Technol. 2012;61:1008–1020. doi: 10.1109/TVT.2012.2183152
- Abe M. Trends in intelligent vehicle dynamics controls and their future. NTN Tech Rev. 2013;81:2–10.
- Huang PS, Pruckner A. Steer by wire. In: Manfred Harrer, Peter Pfeffer, editors. Steering handbook. Cham: Springer; 2017. p. 513–526.
- Fahimi F. Full drive-by-wire dynamic control for four-wheel-steer all-wheel-drive vehicles. Veh Syst Dyn. 2013;51:360–376. doi: 10.1080/00423114.2012.743668
- Furukawa Y, Yuhara N, Sano S, et al. A review of four-wheel steering studies from the viewpoint of vehicle dynamics and control. Veh Syst Dyn. 1989;18:151–186. doi: 10.1080/00423118908968917
- Herold P, Wallbrecher M. All-wheel steering. In: Manfred Harrer, Peter Pfeffer, editors. Steering handbook. Cham: Springer; 2017. p. 493–512.
- Nalecz AG, Bindemann AC. Handling properties of four wheel steering vehicles (No. 890080). SAE Technical Paper; 1989.
- Nalecz AG, Bindemann AC. Analysis of the dynamic response of four wheel steering vehicles at high speed. Int J Veh Des. 1988;9:179–202.
- Whitehead JC. Four wheel steering: Maneuverability and high speed stabilization (No. 880642). SAE Technical Paper; 1988.
- Shinagawa T, Kudo M, Matsubara W, et al. The new Toyota 1.2-liter ESTEC turbocharged direct injection gasoline engine (No. 2015-01-1268). SAE Technical Paper; 2015.
- Anubi OM. Variable stiffness suspension system. Ann Arbor: University of Florida; 2013.
- Savaresi SM, Poussot-Vassal C, Spelta C, et al. Semi-active suspension control design for vehicles. Kidlington: Elsevier; 2010.
- Ikenaga S, Lewis FL, Campos J, et al. Active suspension control of ground vehicle based on a full-vehicle model. Proc Am Control Conf. 2000;6:4019–4024.
- Sekulić D, Dedović V. The effect of stiffness and damping of the suspension system elements on the optimisation of the vibrational behavioural of a bus. Int J Traffic Transp Eng. 2011;1:231–244.
- Sharp RS, Crolla DA. Road vehicle suspension system design-a review. Veh Syst Dyn. 1987;16:167–192. doi: 10.1080/00423118708968877
- Yamashita M, Fujimori K, Hayakawa K, et al. Application of H∞ control to active suspension systems. Automatica (Oxf). 1994;30:1717–1729. doi: 10.1016/0005-1098(94)90074-4
- Els PS, Theron NJ, Uys PE, et al. The ride comfort vs. handling compromise for off-road vehicles. J Terramech. 2007;44:303–317. doi: 10.1016/j.jterra.2007.05.001
- Merker T, Girres G, Thriemer O. Active body control (ABC) the DaimlerChrysler active suspension and damping system (No. 2002-21-0054). SAE Technical Paper; 2002.
- Morales AL, Nieto AJ, Chicharro JM, et al. A semi-active vehicle suspension based on pneumatic springs and magnetorheological dampers. J Vib Control. 2018;24:808–821. doi: 10.1177/1077546316653004
- Sun S, Tang X, Li W, et al. Advanced vehicle suspension with variable stiffness and damping MR damper. 2017 IEEE International Conference on Mechatronics (ICM); 2017, February, p. 444–448.
- Trächtler A. Integrated vehicle dynamics control using active brake, steering and suspension systems. Int J Veh Des. 2004;36:1–12. doi: 10.1504/IJVD.2004.005316
- Wen S, Chen MZ, Zeng Z, et al. Fuzzy control for uncertain vehicle active suspension systems via dynamic sliding-mode approach. IEEE Trans Sys, Man, Cybern: Sys. 2017;47:24–32. doi: 10.1109/TSMC.2016.2564930
- Choi SB, Lee HK, Chang EG. Field test results of a semi-active ER suspension system associated with skyhook controller. Mechatronics (Oxf). 2001;11:345–353. doi: 10.1016/S0957-4158(00)00022-2
- Guglielmino E, Sireteanu T, Stammers CW, et al. Semi-active suspension control: improved vehicle ride and road friendliness. London: Springer Science & Business Media; 2008.
- Koch G, Kloiber T. Driving state adaptive control of an active vehicle suspension system. IEEE Trans Control Syst Technol. 2014;22(1):44–57. doi: 10.1109/TCST.2013.2240455
- Petek NK, Romstadt DJ, Lizell MB, et al. Demonstration of an automotive semi-active suspension using electrorheological fluid. SAE Trans. 1995;104:987–992.
- Cohen J. Statistical power analysis for the behavioral sciences. 2nd ed. Hillsdale (NJ): Erlbaum; 1988.
- Karnopp D. How significant are transfer function relations and invariant points for a car suspension model? Veh Syst Dyn. 2009;47:457–464. doi: 10.1080/00423110802179909
- Yoshimura T, Kume A, Kurimoto M, et al. Construction of an active suspension system of a quarter car model using the concept of sliding mode control. J Sound Vib. 2001;239:187–199. doi: 10.1006/jsvi.2000.3117
- Wong JY. Theory of ground vehicles. New York: John Wiley & Sons. Inc.; 2001.
- Welch P. The use of fast Fourier transform for the estimation of power spectra: a method based on time averaging over short, modified periodograms. IEEE Trans Audio Electroacoust. 1967;15:70–73. doi: 10.1109/TAU.1967.1161901
- Stoica P, Moses RL. Spectral analysis of signals. Upper Saddle River (NJ): Prentice-Hal; 2005.
- Hayes MH. Statistical digital signal processing and modeling. Hoboken (NJ): John Wiley & Sons; 2009.
- Sano S, Furukawa Y, Shiraishi S. Four wheel steering system with rear wheel steer angle controlled as a function of steering wheel angle. SAE Trans. 1986;95:880–893.
- Canale M, Milanese M, Novara C. Semi-active suspension control using “fast” model-predictive techniques. IEEE Trans Control Syst Technol. 2006;14:1034–1046. doi: 10.1109/TCST.2006.880196
- Giorgetti N, Bemporad A, Tseng HE, et al. Hybrid model predictive control application towards optimal semi-active suspension. Int J Control. 2006;79:521–533. doi: 10.1080/00207170600593901
- Martens MH, Jenssen GD. Behavioral adaptation and acceptance. London: Springer; 2012. p. 117–138.
- Mehler B, Reimer B, Lavallière M, et al. Evaluating technologies relevant to the enhancement of driver safety. Washington: AAA Foundation for Traffic Safety; 2014.
- Melman T, De Winter JCF, Abbink DA. Does haptic steering guidance instigate speeding? A driving simulator study into causes and remedies. Accid Anal Prev. 2017;98:372–387. doi: 10.1016/j.aap.2016.10.016
- Saad F. Some critical issues when studying behavioural adaptations to new driver support systems. Cogn Technol Work. 2006;8:175–181. doi: 10.1007/s10111-006-0035-y
Appendix A – Cohen’s d visualised
Figure A1. The scores of the four repetitions (asterisks) and means of four repetitions (horizontal lines) for the sport and comfort mode. The whiskers represent the mean ± 1 standard deviation. Cohen’s d represents the number of times the pooled standard deviations fits between the two means.