
ABSTRACT
New technologies are gaining ground in various disciplines, and road safety is not an exception. The objective of this paper is twofold: (1) to review the state-of-the-art technologies implemented in bicycles to improve cyclists’ safety, and (2) to propose a classification for the levels of smartness of emerging “smart bikes”. This paper defines six levels of smartness for bicycles based on their functionality and evaluates the Technology Readiness Levels of bicycle technologies. Furthermore, areas for future research were identified and discussed. To achieve these, we conducted a literature review which employed two academic databases –Scopus and Web of Science– and the Google Scholar search engine, following the framework of the systematic literature review methodology for the search and selection process. A total of 36 studies that met the inclusion criteria were investigated. The majority of these studies focus on warning systems aiming to forestall an imminent collision, mostly by using accelerometers/gyroscopes, LIDAR, sensors and networking communication. These systems, despite their preliminary state, demonstrate a positive effect on cyclists’ safety. The review concludes that there is a need for further deployment and testing of such systems with field trials to gain concrete evidence regarding their impact on cyclists’ safety. It also highlights that advanced technologies are scarcely implemented in bicycles and that most smart bicycle systems are based on smartphones. Thus, the question is: what lies in the future of smart bicycles from today’s perspective?
1. Introduction
The new era of mobility employs new technologies such as sensors and wireless communication to achieve a more sustainable, reliable, and safer environment for road users (Storme et al., Citation2021). Numerous studies have been published concerning relevant new technologies and systems like Cooperative Intelligent Transport Systems (C-ITS) and Connected Autonomous Vehicles (CAVs) (Milakis et al., Citation2017; van der Pas et al., Citation2012) as well as electronic vehicle systems such as Advanced Driving Assistance Systems (ADAS). For instance, ADAS assist drivers by warning them when the vehicle fails to keep within the road lanes (European Commission, Citation2018; Piao & McDonald, Citation2008), or the Intelligent Speed Adaptation (ISA) system which adjusts the speed of the vehicle (van der Pas et al., Citation2012). These systems aim to minimise human error, which accounts for more than 90% of all road injuries, according to the European Commission (Citation2018).
Unlike motor-vehicle transport, the implementation of Information and Communications Technologies (ICT) and C-ITS in cycling has not been comprehensively investigated (Gadsby & Watkins, Citation2020), even though cycling offers several benefits both to society and the environment (WHO, Citation2022). Cycling is one of the most sustainable and green transportation modes. These advantages include the relief of congestion, the reduction in Greenhouse Gas emissions (Bucher et al., Citation2019), and improvements in the well-being of cyclists (Useche et al., Citation2019; Whitaker, Citation2005). Many people worldwide have been switching to bicycles, especially to e-bikes, and cycling has increased even more due to the Covid pandemic (Buehler & Pucher, Citation2021; Nikitas et al., Citation2021). In the Netherlands, the distance covered by e-bikes increased by 13% between 2019 and 2020, whereas the risk of deaths per e-bike kilometre cycled increased by more than one-third for the same years (KiM, Citation2021; SWOV, Citation2022). 31% of all road fatalities in 2019 were cyclists (203 fatalities), while in 2020, this percentage was 37% (229 fatalities). 32% (74 fatalities) of these fatalities were e-bike users (Statistics Netherlands (CBS), Citation2021). It is noteworthy that in 2020, the number of cyclists’ fatalities was higher than that of vehicle drivers (Statistics Netherlands (CBS), Citation2021). In spite of the constantly evolving landscape of cycling and electric bike adoption, applications of new bicycle technologies are still immature.
In recent years, academic research on new technologies related to cyclists’ comfort and safety is growing. These studies have mainly focused on shared bicycle technologies such as locking and unlocking systems based on mobile applications, air pollution detection, and systems that track physiological factors like heart rate (Boularas et al., Citation2021; Muhamad et al., Citation2020; Nikolaeva et al., Citation2019; Shen et al., Citation2018). Furthermore, a considerable number of studies focuses on technologies affecting cyclists’ road safety; however, it is unclear what type of technologies are implemented for bicycles. To the best of the authors’ knowledge, a comprehensive review of such studies is lacking. Additionally, a clear definition of a “smart bike” – a concept gaining popularity nowadays, is missing in the literature.
To address this gap, this paper aims to conduct a literature review – to develop a topology of smart cycling technologies that affect cyclists’ road safety for utilitarian trips, to facilitate a comparison of different technologies and understand potential impacts.
This review is organised in the following sections: Section 2 describes the methodology; Section 3 defines the levels of smartness on bicycles and assesses the current technologies on bicycles based on the Technology Readiness Levels (TRLs); Section 4 reports the findings of the review categories based on the purpose of each system; Section 5 discusses the findings and considers future research insights; and Section 6 presents the conclusion.
2. Methodology – search strategy
The search and selection process of this literature review follows the framework of the systematic literature review methodology (Page et al., Citation2021) to ensure reproducibility, transparency, and an extended reach in the literature. However, the theoretical impossibility to achieve saturation (Durand et al., Citation2021, p. 38) still remains. Literature reviews, generally, omit to explicitly state and present the methodology used (van Wee & Banister, Citation2015). To address this, in our case the following section explicitly describes it in three stages: (1) search query, (2) databases, and (3) selection criteria.
2.1. Search query
The search query included 29 keywords in total and in some cases, generic terms avoiding the risk of excluding potentially relevant results. It consists of two parts; the first part referred to the type of bicycles and the second part referred to the new technologies associated with safety and user behaviour. Note that each database operates with a different query structure; therefore, the search query was adjusted accordingly. Only documents in English were included in the review, and no geographical restrictions were applied.
Employed search query:
“smart bike” or “connected bike” or “intelligent bike” or “smart cycling” or “smart bicycle” or “connected bicycle” or “intelligent bicycle” or “Internet of Bicycle” or “smart e-bike” or “connected e-bike” or “electrically-assisted bicycle” or “pedelec” AND “safety” or “monitoring system” or “user experience” or “behaviour” or “acceptance” or “smart velomobility” or “smart mobility” or “smart cities” or “intelligent transport” or “internet of things” or “control system” or “GPS” or “injury” or “accident” or “collision” or “incident” or “crash”.
2.2. Selection criteria
In addition to the search query mentioned above, we included studies that satisfied the following criteria:
Only studies examining technologies implemented on conventional bicycles, e-bikes and speed-pedelecs were included.
Only studies focusing on the general population were included.
Only studies examining advanced technologies (sensors, IoT, wireless communication) directly implemented on bicycles that affect cycling safety were included.
All academic publications, conference papers, books, reports and technical reports were included.
Studies examining motorcycles, mopeds, and scooters were excluded.
Studies focusing on exercise-related aims and physiological factors (i.e. heart rate) were excluded.
Studies examining bicycle systems for specific populations, and populations with disabilities were excluded.
Studies examining technologies implemented on cyclists (smart helmets/jackets) were excluded.
2.3. Databases
This review employed the two major and most comprehensive academic databases (Pranckutė, Citation2021) –Scopus and Web of Science– and the Google Scholar engine for grey literature (Haddaway et al., Citation2015). This choice conforms with a recent scoping review in the transport field by Tafidis et al. (Citation2022). The screening tool Rayyan which helps users categorise and screen documents to efficiently perform the review process (Ouzzani et al., Citation2016) was used. First step was to import the hits from Scopus and Web of Science into the Rayyan and remove duplicates. The remaining hits were screened for eligibility based on the selection criteria listed above. The first screening was based on title and abstract, and for the second, the full text of the potentially relevant documents was reviewed. Note that the selection criteria were developed in advance before the process of screening commenced.
Subsequently, the Google Scholar engine was employed to search for grey literature. Given that the use of the relevant search query was not possible, four keywords were used individually instead, namely “smart bike”, “connected bike”, “intelligent bike”, and “smart cycling”. The retrieved hits were also screened first based on title and abstract, and second on their full text against the same eligibility criteria.
2.4. Results
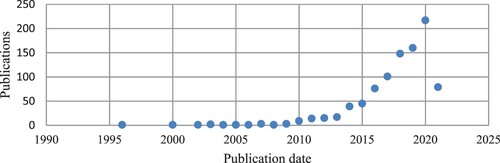
The databases search resulted in 1035 hits up to May 2021; 946 were from Scopus and 89 were from Web of Science. This difference in the number of results is due to the relevance of the topic that each database welcomes most (Bosman et al., Citation2006; Pranckutė, Citation2021). The chronological distribution of these hits is presented in . After deduplication, 939 hits were screened in title and abstract, and 82 of these hits were considered potentially relevant to examine full texts. Overall, 34 documents were finally included in the review following the second –full text– screening.
Figure 1. Distribution of publications through the years.
For the Google Scholar search, there were no relevant hits after the fifth page of the results. However, the first ten pages of each of the four keywords were still searched to ensure that no relevant hits were left out. Since each page included 10 articles, 400 hits were screened. Six articles remained after the first –title and abstract– screening and two were finally included in this review after full text screening.
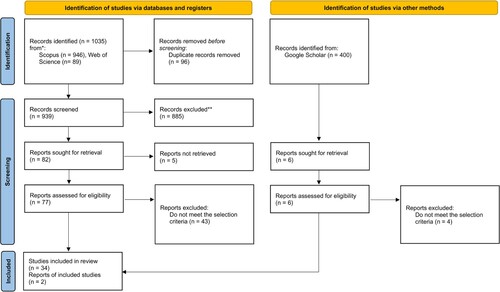
In total, 36 documents that explicitly considered road safety impacts or implications were included in this review. All of them have been published within the last six years, as no studies were retrieved on this topic before 2015. Concerning the types of the included publications, most of them are divided into two categories, specifically journal papers (15) and conference papers (14). While the rest are book sections (5) and reports (2). illustrates the selection process using the PRISMA 2020 (Page et al., Citation2021) flow diagram.
Figure 2. PRISMA flow diagram.
3. Evolution of new technologies on bicycles
New technologies have become an integral part of cycling in recent years, impacting cyclist safety as an additional means and/or as part of the bicycle itself. The most prevalent technologies found in this review are networking technologies, GPS, and accelerometers/gyroscopes. lists them in detail. Application examples of such technologies in bicycles are met under the characterisation “smart cycling” (Nikolaeva et al., Citation2019); and “connected bikes” (Piramuthu, Citation2017), and they consist of blinkers, anti-theft systems, pothole alerts, and blind-spot detection using geofencing services. Bicycle manufacturers like Sparta (Citation2016) and Stromer (Citation2017) have already introduced different versions of a “smart e-bike” to the market, including anti-theft systems. Although there are bicycles designated as “smart” in the market, there is no consensus on what can be labelled as “smart” or what the levels of smartness are, unlike the J3016 standard of automated vehicles, which defined automated driving (SAE, Citation2019). Defining the smartness of a bicycle is a gap which this paper tries to fill. However, how can we classify a bicycle as smart? Alter (Citation2020) described the context of smart devices and systems, not limited to transportation, as something that cannot be binary (yes/no) and proceeded to classify the smartness of the system. In the first level of this classification, a system does not process information or perform any actions. In contrast, on the highest (fifth) level, a system designs and executes unscripted or partially scripted actions based on the received information (Alter, Citation2020). Furthermore, connected vehicles are equipped with advanced ICT, allowing them to receive and share information in a connected environment (i.e. Vehicle to Everything communication) in order to perform actions (Coppola & Silvestri, Citation2019). To sum up, the capability of a system to execute actions and the use of ICTs are considered crucial parameters when defining the smartness of a bicycle.
Table 1. Technologies have been used.
3.1. Topology of smart bicycle technologies
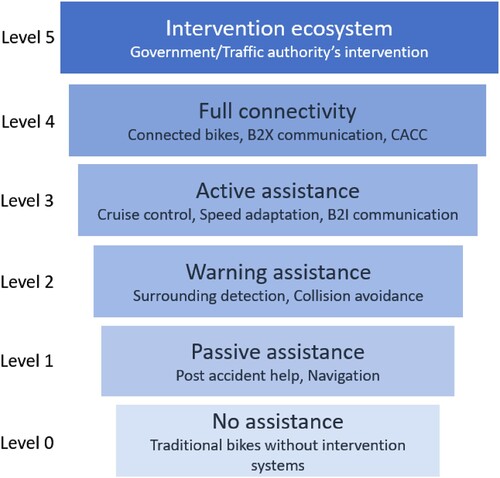
In this section, we propose a topology for the Bicycle Smartness Level (BSL), considering dimensions of smartness defined by Alter (Citation2020) and the automation levels of driving according to SAE (Citation2019). With this topology (), we wish to bridge the gap between the clear picture existing for automated vehicles and the less defined one in the more recently developed domain of smart bikes. Ideally in this way, we can provide a foundation for a common language to be developed and used in future research to avoid confusion between the different capabilities and levels of smart bicycles. By doing so, the functionalities of smart bicycles addressing cyclist safety can be clarified through an escalation procedure. Moreover, this effort contributes to the literature by drawing a clear landscape of levels of smartness regarding the incorporated technology.
To clarify, presents the BSLs based on the degree of assistance of these systems and their characteristics as follows:
Level 0 contains the traditional bicycles, which cyclists pedal to use, and e-bikes with an electric motor and battery.
Level 1 embodies systems that detect accidents and send emergency alerts as well as navigation systems.
Level 2 consists of bicycles equipped with systems that can detect obstacles and warn cyclists to avoid a collision and cyclist monitoring system.
Level 3 includes bicycles with cyclist assistance, including cruise control and automatic speed adjustment, to comply for instance, with the speed limits and reduce speed in critical locations. At this level Bike to Infrastructure (B2I) communication will be employed.
Level 4 consists of systems that allow cyclists to receive notification of dangerous conditions through a connected environment where Bikes communicate with other Bikes (B2B), and Vehicles (B2V), achieving Bike to Everything (B2X) communication as well as braking assistance.
Level 5 comprises an intervention ecosystem where, based on real-time data, governments or traffic authorities are able to influence user’s behaviour, e.g. interventions in the operation of smart bicycles. C-ITS and advanced technologies are used as behavioural change instruments to achieve specific societal goals.
Table 2. Extended topology and summary of the literature findings.
With the development of new technologies and the deployment of higher levels of smartness becoming a reality, bicycles and their systems are able to sense, process and act, providing advanced assistance to cyclists. Each level includes and builds on the features of the preceding levels. Note that the use of an electric motor is mandatory for speed interventions.
Based on the above classification, it is important to clarify that the current state of technologies implemented falls within Level 2, where a bicycle can process some information and warn cyclists. In order for bicycles to reach a higher BSL, different factors have to be considered. Infrastructure, society, policy and governance are factors also implicated in the development of automated vehicles (Milakis et al., Citation2017) and could also be applied to bicycles.
3.2. Technology readiness levels of bicycles
National Aeronautics and Space Administration (NASA) has defined and uses TRLs to systematically measure the maturity of a technology and compare different types of technologies (Mankins, Citation1995). Even though the TRLs were developed for technologies and systems regarding space, today they are broadly used in multiple domains ranging from commercial use to research, i.e. European Commission Horizon 2020 (Bruno et al., Citation2020).
The TRLs are divided into nine different levels describing the maturity of a technology or system. The first level includes the principle idea of technology and the central concept, while the last (9) level consists of the full development and the release of the technology into the market (please refer to Mankins (Citation1995) for a comprehensive review of these levels). The central use of the TRL framework falls into two parts: first to bring a specific technology into focus and examine its uses, and second, to assess the level of maturity of this technology within the TRL framework.
To assess the readiness level, we focused on deploying such technologies in the BSL – Level 5, since this is the level of interest for the future. In order to interpret the TRL for this level, we examined the existing technologies as applied to bicycles. As a result, we conclude that bicycle technologies currently fall into TRL 1 “Basic principles observed and reported” considering the maturity of technologies and lack of testing for the proposed systems. Nevertheless, since most of these technologies have already been implemented in motor vehicles, bicycles may adopt them effortlessly and reach the launch stage faster. Our assessment of the TRLs for each of the five BSLs is given in .
4. Results of the review
The documents included were classified into the 6 levels of smartness set out above and also grouped based on the technologies they used (see for an extended summary of the review results). These are presented in this section alongside a discussion of the use of each system and its limitations.
4.1. Level 0
Level 0 includes all bicycles, conventional and e-bikes, that do not employ any technology aiming to affect cyclists’ safety described in upper levels.
4.2. Level 1
A level 1 smart bicycle is equipped with navigation systems and technologies to detect accidents and send emergency alerts.
4.2.1. Accident detection and alerting systems
Islam et al. (Citation2020) mentioned that in many cases, it takes more than 15 min for bystanders around a crash to notify the emergency unit. This delay may cost the injured person vital time (Rajarapollu et al., Citation2016), so the contribution of telecommunication technologies in resolving this issue is crucial. To this end, numerous studies have focused on accident detection and emergency notification in the case of an accident.
Dutta and Dontiboyina (Citation2016) developed an application using accelerometer and sensors to receive information about the bicycle’s axes X, Y, and Z. The application uses this information to detect if an accident has occurred by measuring any alteration in the axes or a decrease in speed greater than 3 g (gravitational acceleration). Similarly, Islam et al. (Citation2020) created an application that uses accelerometer/gyroscopes and controllers to detect crashes and send alerts. Another study, by Rajarapollu et al. (Citation2016) used accelerometers, sensors and microcontrollers to measure the bicycle's angle and vibration level to detect an accident. Alam et al. (Citation2018) also developed an application that recognises vibrations representing a crash using microcontrollers. The role of these applications is twofold, to detect an accident and send an emergency notification. GPS was used to retrieve the location of the bicycle, and telecommunications technologies to share the crash location with the emergency units and/or with the predefined contacts. However, while these applications are functional, they have not been tested in a real environment. Therefore, the efficiency of these systems depends on the adoption of such technologies by the emergency units.
4.2.2. Route planning services (navigation)
Route planning guides people to reach a destination. There are numerous applications that users can access through their smartphones, such as Google Maps; however, the majority of them fails to provide traffic safety-related information, which is a crucial functionality.
J. L. He et al. (Citation2019) developed an intelligent safety system connected with the cyclist’s smartphone. The cyclist is guided by a device that uses a green to red hue and is embedded in the bicycle’s handlebar. Furthermore, Oliveira et al. (Citation2021) surveyed the use of new technologies on bicycles. They listed numerous navigation applications aiming to provide safer routes which is a crucial characteristic to make cycling safer.
These studies aim to increase cyclists’ safety using route planning systems; however, a combination of these systems may satisfy cyclists’ needs better since that will allow them to ride without looking at their smartphones for directions. These systems are mainly smartphone-based, which means that they are dependent on mobile connection and battery.
4.3. Level 2
A level 2 smart bicycle is equipped with sensors, cameras, LIDAR (Light Detection and Ranging), and other technologies that allow to detect surroundings –obstacles– and warn cyclists to avoid an imminent collision as well as to monitor cyclists.
4.3.1. Collision avoidance
Collision avoidance systems for vehicles and motorcycles have been widely researched for many years and their results on safety are well-known. Applications of such systems are the lane support systems and anti-locking systems (European Commission, Citation2018; Savino et al., Citation2020). The purpose of these systems is to warn and assist drivers in mitigating the risk of contingent collisions, and they have recently started being applied to bicycles.
Xie et al. (Citation2021) created a system aiming to sense the vehicle trajectory within a specific range near the bicycle. If the system detects a vehicle in the proximity of the bicycle, it creates a sound to notify the cyclist and the driver of the vehicle to avoid a collision. They embedded a LIDAR sensor below the bicycle's handlebar to scan a wider area in front of the bicycle, aiming to detect more obstacles. In addition, they used an accelerometer, gyroscope and microelectromechanical systems to detect the bicycle’s movement for the automatic activation of the sensors. They conducted simulations and experiments to test the system's validity by tracking obstacles in a range of 20 m. Similarly, Amin et al. (Citation2019) developed a prototype that estimates the distance between the bicycle and other vehicles through sonars and notifies cyclists by displaying the distance in a monitor placed on the bicycle’s handlebar. Husges and Degen (Citation2021) developed an algorithm to track objects in urban areas using radar, calculating the object's distance and velocity and warning cyclists about them. Jeon and Rajamani (Citation2019) developed a system to track vehicles in the rear using a laser sensor. The system tracks vehicles in the same lane and/or in the adjacent lane of the bicycle. They conducted experiments, and the system was able to recognise and track the movements of the vehicles successfully. However, one limitation is that there are difficulties in accurately measuring the longitudinal and lateral distances simultaneously. Degen et al. (Citation2019) developed a system that provides critical information to cyclists. The information can be transmitted to cyclists using a sound, or red signal or vibration on the handlebar. The authors suggested two modes of object detections, based on energy consumption, (a) high performance detection for critical situations, i.e. when approaching an intersection, and (b) low performance detection for non-critical situations. Hagelen et al. (Citation2019) developed a radar with a 24 GHz frequency modulation continuous wave that aims to increase cyclist safety and reduce the accident risk by providing assistance to users in detecting obstacles. They proposed two different types of radars, one for rural and one for urban areas with different ranges of 30o and 70o degrees, respectively. The higher angle is proportional to the increased possibility of coming across an obstacle within a city area. Felix et al. (Citation2018) examined different sensors requirements for creating an e-bike assistance system. They used different sensors and applied them on different parts of the e-bike such as fork, handlebar stem, down tube, seat tube, chain stay, to conduct experiments investigating the most suitable position. For testing they set up different scenarios of the e-bike and stated that the fork and the handlebar stem are the least efficient among the options to mount angular sensors. Furthermore, authors concluded that the squealing of the disk brake could affect the quality of a sensor up to the 19 kHz range. Maier et al. (Citation2016) developed and tested a braking system to avoid critical front wheel lockup and nose-over accidents. They embedded the system into an e-bike with disk brakes and conducted two experiments, manned and unmanned. The results showed the bicycle was safer when using the system and gained more trust from the users.
Piramuthu (Citation2017) examined connectivity systems for bicycles either already available on the market or close to this stage. Some of the features of these bicycles/systems include a potholes alert and blind-spot detection using GPS, IoT, and smartphones. Finally, in their review, Gadsby and Watkins (Citation2020) mentioned studies about an effective positioning system for bicycles, and a study with a detection system of approaching vehicles. They concluded that obstacle detection could improve cyclist safety, and could be installed on e-bikes since they already have power that could be made available to operate the system.
Obstacle detection for bicycles aims to warn cyclists to avoid a collision. Most studies implemented and used the Kalman filtering algorithm, increasing the quality of detecting objectives and reducing the errors, and focusing on low-density LIDAR since it is inexpensive and lighter than high-density ones. Furthermore, several sensors have been used to detect obstacles including LIDAR, cameras, longitudinal and lateral sensors, radar rather than GPS, which is widely used in other studies. These systems could reduce cycling injuries and their adoption in bicycles is possible in the near future as communication protocols are not required and they can be applied independently. Additionally, the energy demands of such systems is low, but this can vary depending on their level of accuracy.
4.3.2. Monitoring systems
Monitoring systems use multiple sensors, and GPS to collect real-time data to monitor and to analyse cyclists’ riding behaviour. Such a system creates a network where cyclists share and save data to a cloud using wireless communication and IoT.
Aguiari, Delnevo, et al. (Citation2018) designed a smart e-bike ecosystem prototype in which bicycles collect traffic data and pollution levels on the streets using GPS and vehicular network sensors. The application gathers and shares data with other users and road operators to improve cyclists’ safety. Kiefer and Behrendt (Citation2016) developed a smart e-bike monitoring system that applies the IoT into cycling and records location, level of assistance and other data. This system consists of a smartphone with GPS and 3G connectivity and sensors collecting all the e-bike’s relevant information. The data is available to researchers and users by logging in to a specific website. Similarly, Y. Lee and Jeong (Citation2018) developed a monitoring system using microcontrollers, sensors, and GPS to monitor and share data within a group of cyclists. This system uploads and saves all the data to a cloud, and the application uses an open-source data tool analyst called Goldencheetah, through which users can access their data (speed, route, riding information).
The above studies used multiple sensors for collecting data and the internet to upload the data to a cloud and share it within a group. The most comprehensive field trial was Kiefer and Behrendt (Citation2016), with 30 e-bikes and 80 participants. Moreover, these studies designed and implemented systems that can be used to develop a connected environment. However, smartphones are necessary to operate these systems, affecting their reliability due to the shortage of battery and GPS accuracy.
4.3.3. Human–computer interaction and user behaviour
Human–Computer Interaction (HCI) and user behaviour are two of the main aspects of the adoption of new technologies and systems. Users typically adopt these systems in their driving experience, overestimate the potentials of these systems, and are then disappointed when their expectation as not met. This change in user behaviour is called behavioural adaptation (Eskandarian, Citation2012). Therefore, users need to be aware of the limitations of those systems to avoid unrealistic expectations (Sullivan et al., Citation2016).
Behrendt (Citation2016) proposed a so-called smart velomobility concept that merges sensor technologies with the users’ experience by combining IoT, ITS, velomobility and smart cities. Behrendt (Citation2016) investigated collected data such as route, speed, riding behaviour and level of assistance from field trials with 80 participants (Kiefer & Behrendt, Citation2016). The results of this study highlight different perspectives of Human-Machine Interfaces (HMI). More specifically, the positive characteristics that could occur in a networked environment such as feeling rewarded and being able to share the data in contrast to the unpleasant feeling of invasion of privacy. This feeling of being tracked in some cases affects cyclists’ riding behaviour and causes them to ride more carefully, i.e. not running red lights. Andres et al. (Citation2019) developed a prototype named “ARI” using iOS aiming to help cyclists reach green lights (green wave). They used a smartphone’s GPS and Bluetooth to track the bicycle’s position and send its speed to a microcontroller connected to the bicycle’s engine, so that the latter could adapt the bicycle’s speed. In order to test ARI, they recruited 20 participants to examine HCI. Some of the significant findings are that participants were satisfied by using ARI since it assisted them in getting green lights. During the first rides, participants were worried about their safety since the bicycle adapted the speed on its own, and it was stated that they preferred to be notified prior to a speed adaption.
One of the observed weaknesses is that Andres et al. (Citation2019) studied HCI for only a specific function, so it is unknown how users’ experience could be affected if multiple systems were embedded to a bicycle simultaneously. In addition, Behrendt (Citation2016) studied user interaction once they had completed a ride rather than in real-time. These limitations and the few number of studies indicate that there is still room for further research on HCI in bicycles, and future studies should focus on filling this gap.
4.4. Level 3
A smart bicycle at level 3 includes systems that assist cyclists in providing specific power and complies with the speed limits in critical locations.
4.4.1. Smart assistance systems
E-bikes can make the cycling experience more desirable by demanding less pedalling effort. Smart assistance systems can consider specific factors such as hilly areas and different user needs in order to abet cyclists by providing personalised assistance: the needed power, gear and breaking for each occasion.
J. S. Lee and Jiang (Citation2019) proposed a fuzzy-logic control assistance system that provides the required power to cyclists to ride an e-bike with less effort ensuring their safety and comfort. This system adapts to users’ pedalling behaviour and provides power assistance according to each user’s needs and the topography of the riding area. Similarly, Makarova et al. (Citation2018) developed an assistance system which is able to identify cyclist’s physical condition and provide the cyclist with the appropriate power based on environmental parameters and their abilities. This system uses a smartphone, GPS, sensors, microcontrollers, a gyroscope, and an electric motor. Padmagirisan et al. (Citation2019) developed a power assistance system to help users pedal with more ease and cruise control to set and/or maintain the desired speed. Wu and Lin (Citation2020) developed an intelligent bicycle, named IntelliBike, with an automatic gears system, consisting of a Raspberry Pi and Arduino and using Kalman filtering to improve the system’s ability to analyse user riding conditions. Lasty, Lin et al. (Citation2015) developed an automatic shift control system that consists of a microcontroller and sensors and is capable of self-learning to better adapt to user riding habits.
Nikolaeva et al. (Citation2019) displayed the landscape about the future of smart cycling. They focused on innovative applications and technologies for bicycles using IoT and ICT by searching around 85 websites and listed the use and characteristics of these applications for bicycles. These features vary from blinkers indicating turns to smart applications that can reach the green wave, saving time and making cycling safer. This work provides a clear image of how the future of cycling is hand-in-hand with ICT. Finally, Aguiari, Contoli, et al. (Citation2018) created a system called Bike Information Gathering Architecture that collects data, such as riding distance and traffic, through sensors implemented on the bicycle, and shares them through a cloud. The collected data will be analysed to offer smart mobility solutions i.e. users to avoid dangerous roads (traffic-wise) through a Personal Urban Mobility Assistant.
These studies lack any field trials to ensure the reliability of their proposed systems. However, these smart assistance systems tend to be beneficial since they recognise and provide specific assistance to cyclists affecting their safety and comfort. Furthermore, only one study mentioned self-learning abilities for adapting to users’ needs, and artificial intelligence (AI) is missing from all the rest. However, AI will be valuable for the further development of such assistance systems.
4.5. Level 4
In level 4 smart bicycle leverages the communication technologies that allow cyclists to receive notifications of dangerous conditions through a connected environment.
4.5.1. Connected and cooperative bicycles
Communication technologies have positive effects on road safety and numerous studies (Li et al., Citation2017; Talebpour & Mahmassani, Citation2016) have been conducted on connected and C-ITS in vehicles. Nowadays, these technologies are gaining ground in cycling, aiming to achieve communication between bicycles and vehicles, creating a connected environment, and avoiding collisions.
Jenkins et al. (Citation2017) proposed and developed a platform based on a smartphone where the bicycle is connected with vehicles and infrastructure. This platform is called Multimodal Alerting Interface with Networked Short-range Transmissions (MAIN-ST) and its purpose is to send and receive information through a network using the Dedicated Short-Range Communications radio (DSRC) and Arada system. The platform aims to provide users with notifications targeting a safe cycling experience by offering solutions to critical situations. Kourtellis et al. (Citation2019) mentioned two main communication methods to develop a connected environment for bicycles, first a smartphone-based communication, and second the DSRC band protocol. The latter does require that the bicycle has a sufficient energy supply as the communication will demand a certain amount of energy. As such, e-bikes might support it more easily. The authors therefore suggested a smartphone-based system as it seems most feasible. Based on this decision, they developed a system that warns users to avoid an accident by using a smartphone-based application for three different types of users, cyclists, drivers, and pedestrians. Communication is only achieved within the application, and thus involvement by all types of users is necessary. Similarly, Boronat et al. (Citation2021) developed a smartphone-based application named SafeCyclists to warn users when a vehicle or a bicycle is approaching them. Each user has to carry their smartphone to enable the application to warn them about critical situations. They used the mobile 4G network and GPS from the smartphone to share the position of each more frequently and allow communication between the SafeCyclists users.
Increasing cycling flows on bicycle lanes in European cities inspired Céspedes et al. (Citation2016) to develop a prototype Cooperative Adaptive Cruise Control (CACC) for bicycles. The aim is to achieve the platoon-based system in which cyclists respond to a CACC delivered through specific HMI. This system contains GPS, an accelerometer, and an Arduino microcontroller to receive and send information from other bicycles. Piramuthu (Citation2017) mentioned that a B2B communication could be valuable for cyclists since they can share information on a connected environment concerning the road condition using geofence applications.
Oliveira et al. (Citation2021) described the key characteristics that a bicycle in the new era of IoT would have. Some of these characteristics are GPS, sensors, accelerometer/gyroscope, and network communication. Furthermore, the authors mentioned that new technologies on bicycles under a bicycle platform using IoT could improve sustainable mobility under communication and connected environments. Such environments consist of communication among bicycles, Low Power Area Networking as well as IoT. Another study focusing on the effect of new technologies on bicycles conducted by MacArthur et al. (Citation2019) described the available systems for making cycling safer. In parallel, the authors stated that there are multiple limitations concerning the reliability of new systems, which may affect their quality and their adoption by users. Some of the limitations are cybersecurity since it is poorly investigated in the cycling domain and the quality of DSRC. The feasibility of some applications could also be an issue since some of them require a high number of users to operate with high quality data shared on a cloud platform.
Most of the studies describe smartphones-based applications to develop a connected environment and mention GPS accuracy as a limitation in their results. An improvement of the DSRC technologies and cellular networks may overcome this issue. A connected environment for bicycles can have positive aspects in cyclists’ safety, at least in a rural environment where most field trials took place. However, since urban environments host the majority of bicycles, it would also be important to test these systems there.
4.5.2. Unmanned bicycles systems
Fully automated vehicles are being widely investigated and tested in the field and are expected to be released onto the market by 2030 (Coppola & Silvestri, Citation2019). However, there is still a long way to go before fully automated bicycles are available on the market. Nevertheless, unmanned bicycles systems could affect cyclists’ safety since they can balance themselves and move around.
He et al. (Citation2020) developed and implemented a control strategy based on deep learning consisting of the Deep Deterministic Policy Gradient (DDPG) algorithm and the Active Disturbance Rejection Control (ADRC) to stabilise a bicycle (self-balance) and follow a specific trajectory. The authors managed to autonomously run a bicycle under specific circumstances in a simulation environment. Similarly, Terashima et al. (Citation2020) developed an autonomous control system that enables e-bikes to run and turn autonomously by using equilibrium points. Additionally, Zhang et al. (Citation2021) developed and implemented a system for an unmanned bicycle and conducted experimental short trips in a lab allowing the bike to run autonomously.
Unmanned bicycles are in an early stage, and none of these studies can integrate these systems on a bicycle today apart from in simulation and experiments. While there is some research about automation systems in bicycles more needs to be investigated in this field, before they will become available to the general population.
4.6. Level 5
A level 5 bicycle will operate as part of an intervention ecosystem with the employment of C-ITS and advanced technologies.
Smart bicycles will interact with government/traffic authorities allowing the latter to intervene in their operation to influence cyclist behaviour. This level represents an integration of societal goals, similar to level 4 in the Mobility-as-a-Service topology developed by Sochor et al. (Citation2018). By using real-time data collected from bicycles, vehicles, and infrastructure, traffic authorities will be able to intervene by influencing the level of pedal-assistance of e-bikes or enforcing speed limits on the road network. The functionalities of such systems could mitigate the injury risk for cyclists and make cycling safer. While we did not find published papers in the academic literature on this level related to traffic safety, such possibilities on how speed limit enforcement can be valuable in preventing road crashes can be drawn from research in this field for vehicles (Ammar et al., Citation2021; Soole et al., Citation2013). Furthermore, research is ongoing on the potential of geofencing for traffic management, see Hansen et al. (Citation2021) for an overview. Nevertheless, in grey literature, we can find some research and pilots on the use of access and speed control (based on geofencing) to improve traffic safety of e-bike use. For example, the California Department of Transportation (Caltrans) is investigating whether geofencing could be used to prevent e-bikes and e-scooters from entering access-controlled highways and other specified locations and limit the maximum speed in certain areas, allowing access to some bike paths where they typically would not be allowed (DRISI, Citation2020).
5. Discussion and direction for future research
The purpose of the study is to provide an in-depth review of emerging technologies and propose a topology for the BSLs, establishing a common terminology for future studies focusing on emerging technologies affecting cycling road safety.
This literature review follows a specific methodology described in Section 2, to investigate this subject. This is scientifically correct, yet also limits the scope somewhat to research-oriented papers. Thus, we suggest future research to include commercial products and websites searches since they could add to the universal investigation of the topic.
Furthermore, there are still some critical knowledge gaps that must be filled to figure out the safety impact of new technologies. Some possible directions for future research arose when discussing the findings of this review. Most of the systems analysed in this review have been tested through simulations and have not yet been tested extensively in field trials. Additionally, the few existing field trials were carried out in rural environment. Hence, some of these systems have not demonstrated clear evidence of safety benefits. Thus, extended field trials are necessary to investigate the effectiveness of the embedded systems and identify the thresholds required for them to act successfully (e.g. send out a warning) at different road types. For this, we suggest that future field trials should target urban environments since they host the majority of cyclists and come with high risk. To this end, some ongoing studies are currently applying new smart technologies to bicycles. An example in the Netherlands is a bicycle safety pilot project (mid 2021-2022) using IoT technology that automatically modulates the power and speed of fast e-bikes in dangerous traffic conditions (Townmaking Institute, Citation2021). This pilot aims to reduce cycling accidents with the use of intelligent infrastructure as well as using 4G and 5G networks to achieve a connected environment. Furthermore, such a study evidently fills the gap of the insufficient number of field trials and identifies the required need to implement these systems in the current infrastructure. However, this study targets a rural area, too.
Figure 3. The proposed topology of the level of smartness on bikes.
Additionally, a critical gap lies in the indirect effect of these systems due to the possible users’ behavioural changes (i.e. overestimating the systems’ capabilities), resulting in unsafe riding while the BSLs go up. Therefore, the actual and perceived safety benefits need to be investigated as well as users’ reactions when they receive critical notifications. HMI is an important area for further research in these emerging bicycle technologies, as well. Furthermore, since people tend to enjoy the feeling of freedom that comes with a bicycle, connectivity and intervention on bicycles may make cyclists feel restricted and reduce their willingness to use these technologies.
In addition, currently, studies only investigate one system at a time, such as obstacle or accident detection. Future research could address this and provide knowledge on how the simultaneous operation of multiple sensors and systems on a bicycle could affect a system’s efficiency concerning in terms of safety and power consumption.
These safety enabling systems require energy to operate, and several studies (Flüchter & Wortmann, Citation2014; Kourtellis et al., Citation2019; MacArthur et al., Citation2019) observed numerous challenges, such as battery performance issues due to continuous data transmission in a connected bicycle environment. This affects the range of the travel distance of these bicycles and, therefore, user intention to adopt them. However, large batteries and communication through cellular connectivity (5G) appear to be promising solutions to enable bicycles’ integration into a connected environment (Flüchter & Wortmann, Citation2014; MacArthur et al., Citation2019; Oliveira et al., Citation2021).
It is evident that further investigation is needed to better understand the advantages/disadvantages of using smartphone-based systems to promote cycling safety and develop an entire ecosystem for bicycles, at different BSLs. Smartphones are becoming an essential object in everyday life, –in Europe 80% of the population uses them– and their penetration rate is increasing (Statista, Citation2021). Currently, the B2B, B2V and B2X communications are mainly based on smartphones. However, even though smartphone-based systems might help promote cycling safety, they are still far from ideal. This is since, for instance, they may struggle to identify the exact transport mode of the user, such as cycling, walking or driving. Also, the use of smartphones for other functionalities that they were designed for during the day may increase the possibility of them running out of battery. Thus, an important question arises for future research, is it appropriate and effective to use smartphone-based systems as the primary and only means to influence cyclists’ safety?
So far, in this review, we have discussed new technologies that can make cycling safer concurrent to preserving its active way of mobility. Thus, considering the use of unmanned bicycle systems, we think of setting some boundaries on the use of such systems so that cycling will not be losing its advantages. Such systems could be employed in critical situations to retain, for example, balance control in case of an imminent fall rather than replacing the need for steering by a cyclist.
Finally, cybersecurity is another topic that needs investigation. While the smart bicycles reach higher BSLs, new issues arise. Such issues are privacy aspects and the reliability of the systems against hacking. Additionally, the complexity of multiple actors raises the questions of who will be responsible for the collected data, with whom this data will be shared, and what the future of road safety governance will be (Hysing, Citation2021).
To sum up, the proposed BSL topology aims to clarify the concept of “smart” bikes, which was yet undefined. Thus, this review can benefit all actors involved in the cycling field, ranging from researchers and manufacturers to users, by providing a common language. In addition, it offers directions for future work that could assist the deployment of these emerging technologies on bicycling, making the only green and sustainable transport mode–the bicycle–safer.
6. Conclusion
This study presents the current landscape of new technologies implemented on bicycles by reviewing studies focusing on applications and systems affecting cycling safety. While there is a huge portion of recent literature concerning new technologies on bicycles, only a few focus on such technologies for safety purposes. The number of studies examining new technologies for cyclists’ safety has increased steeply after 2015, confirming the growing interest in cycling safety in research and policy-making and growth in the development of bicycle-related technologies.
This paper aims to develop a topology of Bicycle Smartness Level (BSLs) and thereby provide a common language for future development and discussion around smart bicycles. The proposed topology consists of 6 levels: from BSL 0, which contains the traditional bicycles, to BSL 5, which consists of an intervention ecosystem. It is noteworthy that while research and prototypes reach up to BSL 4, the current state of the practice falls into BSL 2. As evident in Section 4, BSL 5 is still theoretical and was not found in the literature. This level will require the cooperation of various stakeholders, digital ecosystem and infrastructure.
To better understand the deployment of different emerging technologies and systems on bicycles we assessed their TRLs which vary. From the findings of this literature review, t is evident that the TRLs of the relevant technologies are inversely proportional to BSLs, since the higher the BSLs the lower the TLRs and more immature the technologies.
This review also demonstrated that the majority of academic studies investigated systems that mainly focused on warning systems for avoiding a collision, more commonly by using accelerometers/gyroscopes, LIDAR, sensors, and microcontrollers. These systems track obstacles such as vehicles and are limited to warning cyclists when they approach them. Although more than 50% of the studies included in this review employed e-bikes which could enable the implementation of speed intervention systems, the adoption of such systems was not investigated, which demonstrates the lack of advanced technologies implemented in bicycles.
To conclude, among the reviewed studies, only a few academic studies collected and shared data through IoT based platforms, which illustrates that the level of communication technologies on bicycles is still underdeveloped. For the promotion of safe bicycle environments, more research is needed to examine the safety impacts of advanced IoT based cycling platforms and safety enhancing features.
Acknowledgments
The authors would like to thank the anonymous reviewers and the editors-in-chiefs for their constructive feedback. Their comments have helped us substantially in improving this paper. Also, we would like to thank the Professor of Transport Policy and Scientific Director TRAIL Research School, Bert van Wee for his comments and suggestions.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- Aguiari, D., Contoli, C., Delnevo, G., & Monti, L. (2018). Smart mobility and sensing: Case studies based on a bike information gathering architecture. In C. Calafate, J. Marquez-Barja, B. Guidi, L. Ricci, & O. Gaggi (Eds.), Vol. 233. 3rd International Conference on Smart Objects and Technologies for Social Good, GOODTECHS 2017 (pp. 112–121). Springer Verlag.
- Aguiari, D., Delnevo, G., Monti, L., Ghini, V., Mirri, S., Salomoni, P., Pau, G., Im, M., Tse, R., Ekpanyapong, M., & Battistini, R. (2018, January 12–15). Canarin II: Designing a smart e-bike eco-system [Paper presentation]. 15th IEEE Annual Consumer Communications and Networking Conference, CCNC 2018, Las Vegas, NV, USA .
- Alam, A. I., Rahman, M., Afroz, S., Alam, M., Uddin, J., Alam, M. A., & Ieee. (2018). IoT enabled smart bicycle safety system.
- Alter, S. (2020). Making sense of smartness in the context of smart devices and smart systems. Information Systems Frontiers, 22(2), 381–393. https://doi.org/10.1007/s10796-019-09919-9
- Amin, N., Ahmed, T., Olee, S. M., Alam, M. T., & Kaisar, T. (2019, December 20–22). Technologically enhanced bicycle: Anti-theft security, automated gear system and rear protection, Dhaka, Bangladesh.
- Ammar, K., Al-Emami, A., & Baher, A. (2021, June 7–10). Real-time vehicle speed enforcement system [Paper presentation]. 2021 10th Mediterranean Conference on Embedded Computing (MECO), Budva, Montenegro.
- Andres, J., Kari, T., Von Kaenel, J., & Mueller, F. F. (2019, June 18). Co-riding with my eBike to get green lights [Paper presentation]. 2019 ACM Conference on Designing Interactive Systems, DIS 2019.
- Behrendt, F. (2016). Why cycling matters for smart cities. Internet of bicycles for intelligent transport. Journal of Transport Geography, 56, 157–164. https://doi.org/10.1016/j.jtrangeo.2016.08.018
- Boronat, P., Pérez-Francisco, M., Calafate, C. T., & Cano, J. C. (2021). Towards a sustainable city for cyclists: Promoting safety through a mobile sensing application. Sensors (Switzerland), 21(6), 1–18. https://doi.org/10.3390/s21062116
- Bosman, J., van Mourik, I., Rasch, M., Sieverts, E., & Verhoeff, H. (2006). Scopus reviewed and compared The cover. Universiteitsbibliotheek Utrecht / Utrecht University Library.
- Boularas, M., Szmytke, Z., Smith, L., Isik, K., Ruusunen, J., Malheiro, B., Justo, J., Ribeiro, C., Silva, M. F., Ferreira, P., & Guedes, P. (2021). Smart bicycle probe – An EPS@ISEP 2020 project. In Vol. 1328 AISC. 23rd International Conference on Interactive Collaborative Learning, ICL 2020 (pp. 115–126). Springer Science and Business Media Deutschland GmbH.
- Bruno, I., Lobo, G., Covino, B. V., Donarelli, A., Marchetti, V., Panni, A. S., … Molinari, F. (2020, September 23–25). Technology readiness revisited [Paper presentation]. Proceedings of the 13th International Conference on Theory and Practice of Electronic Governance, Athens Greece.
- Bucher, D., Buffat, R., Froemelt, A., & Raubal, M. (2019). Energy and greenhouse gas emission reduction potentials resulting from different commuter electric bicycle adoption scenarios in Switzerland. Renewable and Sustainable Energy Reviews, 114, 109298. https://doi.org/10.1016/j.rser.2019.109298
- Buehler, R., & Pucher, J. (2021). COVID-19 impacts on cycling, 2019–2020. Transport Reviews, 41(4), 393–400. https://doi.org/10.1080/01441647.2021.1914900
- Céspedes, S., Salamanca, J., Yañez, A., Rivera, C., & Sacanamboy, J. C. (2016, January 18). Platoon-based cyclists cooperative system [Paper presentation]. IEEE Vehicular Networking Conference, VNC 2015, Kyoto.
- Coppola, P., & Silvestri, F. (2019). Autonomous vehicles and future mobility solutions. In P. Coppola & D. Esztergár-Kiss (Eds.), Autonomous vehicles and future mobility (pp. 1–15). Elsevier.
- Degen, C., Domnik, C., Kurten, A., Meuleners, M., Notz, M., Pohle-Frohlich, R., & Naroska, E. (2019). Driver assistance system for pedelecs.
- DRISI, Caltrans Division of Research, Innovation and System Information. (2020). Analyzing the potential of geofencing for electric bicycles and scooters in the public right of way. https://dot.ca.gov/-/media/dot-media/programs/research-innovation-system-information/documents/preliminary-investigations/geofencing-for-electric-bicycles-and-scooters-pi-a11y.pdf
- Durand, A., Zijlstra, T., Van Oort, N., Hoogendoorn-Lanser, S., & Hoogendoorn, S. (2021). Access denied? Digital inequality in transport services. Transport Reviews, 42(1), 32–57. https://doi.org/10.1080/01441647.2021.1923584
- Dutta, P., & Dontiboyina, U. S. G. V. (2016). NaviRide: Smart bicycle computer with GPS waypoint indicators.
- Eskandarian, A. (2012). Handbook intelligent vehicles.
- European Commission. (2018). Advanced driver assistance systems. https://ec.europa.eu/transport/road_safety/sites/roadsafety/files/pdf/ersosynthesis2018-adas.pdf
- Felix, D., Gorges, D., & Wienss, A. (2018). Experimental analysis of sensor requirements for eBike rider assistance systems.
- Flüchter, K., & Wortmann, F. (2014, October 27–28). Implementing the connected e-bike: Challenges and requirements of an IoT application for urban transportation [Paper presentation]. The First International Conference on IoT in Urban Space, Rome, Italy https://www.semanticscholar.org/paper/Implementing-the-connected-e-bike%3A-challenges-and-Fl%C3%BCchter-Wortmann/62da853ae00b630ea04679e64db1730ccb465402.
- Gadsby, A., & Watkins, K. (2020). Instrumented bikes and their use in studies on transportation behaviour, safety, and maintenance. Transport Reviews, https://doi.org/10.1080/01441647.2020.1769227
- Haddaway, N. R., Collins, A. M., Coughlin, D., & Kirk, S. (2015). The role of Google scholar in evidence reviews and its applicability to grey literature searching. PLoS ONE, 10(9), e0138237. https://doi.org/10.1371/journal.pone.0138237
- Hagelen, M., Jetten, R., Kassner, J., & Kulke, R. (2019). Safety and comfort enhancement with radar for a bicycle assistance system.
- Hansen, L., Arnesen, P., Graupner, S.-T., Lindkvist, H., Leonardi, J., Fahel, R. A., & Andersson, K. (2021). Current state of the art and use case description on geofencing for traffic management. https://closer.lindholmen.se/sites/default/files/2021-11/report-on-current-state-of-the-art-and-use-case-description-on-geofencing-for-traffic-management.pdf
- He, J. L., Liu, M. Z., Wei, Y. M., & Xu, Z. Q. (2019). Design of an intelligent bicycle safety driving system. Safety Science, 118, 397–402. https://doi.org/10.1016/j.ssci.2019.05.050
- He, K., Dong, C., Yan, A., Zheng, Q., Liang, B., & Wang, Q. (2020, October 18–20). Composite deep learning control for autonomous bicycles by using deep deterministic policy gradient [Paper presentation]. 46th Annual Conference of the IEEE Industrial Electronics Society, IECON 2020.
- Husges, S., & Degen, C. (2021, January 13–15). Kalman tracking in driver assistance systems-collision warning for vulnerable road users [Paper presentation]. 17th European Radar Conference, EuRAD 2020.
- Hysing, E. (2021). Responsibilization: The case of road safety governance. Regulation & Governance, 15(2), 356–369. https://doi.org/10.1111/rego.12288
- Islam, M. M., Ridwan, A. E. M., Mary, M. M., Siam, M. F., Mumu, S. A., & Rana, S. (2020). Design and implementation of a smart bike accident detection system.
- Jenkins, M., Duggan, D., & Negri, A. (2017, March 27–31). Towards a connected bicycle to communicate with vehicles and infrastructure: Multimodel alerting interface with networked short-range transmissions (MAIN-ST) [Paper presentation]. 2017 IEEE Conference on Cognitive and Computational Aspects of Situation Management, CogSIMA 2017.
- Jeon, W., & Rajamani, R. (2019). Active sensing on a bicycle for simultaneous search and tracking of multiple rear vehicles. IEEE Transactions on Vehicular Technology, 68(6), 5295–5308. https://doi.org/10.1109/TVT.2019.2911572
- Kiefer, C., & Behrendt, F. (2016). Smart e-bike monitoring system: Real-time open source and open hardware GPS assistance and sensor data for electrically-assisted bicycles. IET Intelligent Transport Systems, 10(2), 79–88. https://doi.org/10.1049/iet-its.2014.0251
- KiM, K. v. M. (2021). Mobiliteitsbeeld 2021 (KiM-21-A018). Den Haag, 2500 EX: https://www.kimnet.nl/mobiliteitsbeeld/publicaties/publicaties/2021/11/18/mobiliteitsbeeld-2021
- Kourtellis, A., Pei-Sung, L., & Neha, K. (2019). Smartphone-based connected bicycle prototype development for sustainable multimodal transportation system (USDOT DTRT13-G-UTC56 Modification No. 3 USF 21179063-17). https://scholarcommons.usf.edu/cutr_nctr/7
- Lee, J. S., & Jiang, J. W. (2019). Enhanced fuzzy-logic-based power-assisted control with user-adaptive systems for human-electric bikes. IET Intelligent Transport Systems, 13(10), 1492–1498. https://doi.org/10.1049/iet-its.2019.0092
- Lee, Y., & Jeong, J. (2018, August 13–15). Design and implementation of monitoring system architecture for smart bicycle platform [Paper presentation]. 15th International Conference on Mobile Systems and Pervasive Computing, MobiSPC 2018.
- Li, Y., Li, Z., Wang, H., Wang, W., & Xing, L. (2017). Evaluating the safety impact of adaptive cruise control in traffic oscillations on freeways. Accident Analysis & Prevention, 104, 137–145. https://doi.org/10.1016/j.aap.2017.04.025
- Lin, S. K., Yang, S. W., & Cheng, C. C. (2015). Design of an automatic shift control system with self-learning ability for a bicycle. Journal of the Chinese Institute of Engineers, Transactions of the Chinese Institute of Engineers, Series A, 38(5), 594–602. https://doi.org/10.1080/02533839.2015.1010451
- MacArthur, J., Harpool, M., & Scheppke, D. (2019). How technology can affect the demand for bicycle transportation: The state of technology and projected applications of connected bicycles. https://pdxscholar.library.pdx.edu/trec_reports/204/
- Maier, O., Pfeiffer, M., & Wrede, J. (2016). Development of a braking dynamics assistance system for electric bicycles: Design, implementation, and evaluation of road tests. IEEE/ASME Transactions on Mechatronics, 21(3), 1671–1679. https://doi.org/10.1109/TMECH.2015.2505186
- Makarova, I., Buyvol, P., Shubenkova, K., Tsybunov, E., Boyko, A., & IEEE. (2018, Sep 14–17). Development of intelligent smart bicycle control system. Proceedings of 2018 IEEE East-West Design & Test Symposium.
- Mankins, J. C. (1995, April 6). Technology readiness levels. White paper.
- Milakis, D., van Arem, B., & van Wee, B. (2017). Policy and society related implications of automated driving: A review of literature and directions for future research. Journal of Intelligent Transportation Systems, 21(4), 324–348. https://doi.org/10.1080/15472450.2017.1291351
- Muhamad, W. N. W., Razali, S. A. B., Wahab, N. A., Azreen, M. M., Sarnin, S. S., & Naim, N. F. (2020, November 9–11). Smart bike monitoring system for cyclist via internet of things (IoT) [Paper presentation]. 5th IEEE International Symposium on Telecommunication Technologies, ISTT 2020.
- Nikitas, A., Tsigdinos, S., Karolemeas, C., Kourmpa, E., & Bakogiannis, E. (2021). Cycling in the era of COVID-19: Lessons learnt and best practice policy recommendations for a more bike-centric future. Sustainability (Switzerland), 13(9), https://doi.org/10.3390/su13094620
- Nikolaeva, A., te Brommelstroet, M., Raven, R., & Ranson, J. (2019). Smart cycling futures: Charting a new terrain and moving towards a research agenda. Journal of Transport Geography, 79, 102486. https://doi.org/10.1016/j.jtrangeo.2019.102486
- Oliveira, F., Nery, D., Costa, D. G., Silva, I., & Lima, L. (2021). A survey of technologies and recent developments for sustainable smart cycling. Sustainability (Switzerland), 13(6), https://doi.org/10.3390/su13063422
- Ouzzani, M., Hammady, H., Fedorowicz, Z., & Elmagarmid, A. (2016). Rayyan—a web and mobile app for systematic reviews. Systematic Reviews, 5(1), 210. https://doi.org/10.1186/s13643-016-0384-4
- Padmagirisan, P., Sowmya, R., & Sankaranarayanan, V. (2019). Power-assist control of a human–electric hybrid bicycle with energy regeneration and cruise control. Proceedings of the Institution of Mechanical Engineers. Part I: Journal of Systems and Control Engineering, 233(2), 179–191. https://doi.org/10.1177/0959651818788776
- Page, M. J., McKenzie, J. E., Bossuyt, P. M., Boutron, I., Hoffmann, T. C., Mulrow, C. D., Shamseer, L., Tetzlaff, J. M., Akl, E. A., Brennan, S. E., Chou, R., Glanville, J., Grimshaw, J. M., Hróbjartsson, A., Lalu, M. M., Li, T., Loder, E. W., Mayo-Wilson, E., McDonald, S., … Moher, D. (2021). The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. BMJ, 372, n71. https://doi.org/10.1136/bmj.n71
- Piao, J., & McDonald, M. (2008). Advanced driver assistance systems from autonomous to cooperative approach. Transport Reviews, 28(5), 659–684. https://doi.org/10.1080/01441640801987825
- Piramuthu, O. B. (2017). Connected bicycles—state-of-the-art and adoption decision. IEEE Internet of Things Journal, 4(4), 987–995. https://doi.org/10.1109/jiot.2017.2697203
- Pranckutė, R. (2021). Web of science (WoS) and scopus: The titans of bibliographic information in today’s academic world. Publications, 9(1), 12. https://doi.org/10.3390/publications9010012
- Rajarapollu, P. R., Bansode, N. V., Mane, P. P., & IEEE. (2016). A novel two wheeler security system based on embedded system.
- SAE. (2019). SAE levels of driving automation, refined for clarity and international audience. Society of Automotive Engineers. https://www.sae.org/news/2019/01/sae-updates-j3016-automated-driving-graphic
- Savino, G., Lot, R., Massaro, M., Rizzi, M., Symeonidis, I., Will, S., & Brown, J. (2020). Active safety systems for powered two-wheelers: A systematic review. Traffic Injury Prevention, 21(1), 78–86. https://doi.org/10.1080/15389588.2019.1700408
- Shen, S., Wei, Z. Q., Sun, L. J., Su, Y. Q., Wang, R. C., & Jiang, H. M. (2018). The shared bicycle and its network—internet of shared bicycle (IoSB): A review and survey. Sensors (Switzerland), 18(8), https://doi.org/10.3390/s18082581
- Sochor, J., Arby, H., Karlsson, I. C. M., & Sarasini, S. (2018). A topological approach to mobility as a service: A proposed tool for understanding requirements and effects, and for aiding the integration of societal goals. Research in Transportation Business & Management, 27, 3–14. https://doi.org/10.1016/j.rtbm.2018.12.003
- Soole, D. W., Watson, B. C., & Fleiter, J. J. (2013). Effects of average speed enforcement on speed compliance and crashes: A review of the literature. Accident Analysis & Prevention, 54, 46–56. https://doi.org/10.1016/j.aap.2013.01.018
- Sparta. (2016). Smart e-bikes. https://www.spartabikes.com/nl-nl/e-bike-advies/smart-e-bikes/
- Statista. (2021). Forecast of the smartphone penetration in Europe from 2010 to 2025. https://www.statista.com/forecasts/1147144/smartphone-penetration-forecast-in-europe
- Statistics Netherlands (CBS). (2021). 610 traffic deaths in 2020. https://www.cbs.nl/en-gb/news/2021/15/610-traffic-deaths-in-2020
- Storme, T., Casier, C., Azadi, H., & Witlox, F. (2021). Impact assessments of new mobility services: A critical review. Sustainability (Switzerland), 13(6), https://doi.org/10.3390/su13063074
- Stromer. (2017). Clever anti-theft protection thanks to full connectivity. https://www.stromerbike.com/en/moments-anti-theft-protection
- Sullivan, M. J., Flannagan, J. M., Pradhan, K. A., & Bao, S. (2016). Literature review of behavioral adaptations to advanced driver assistance systems. www.aaafoundation.org. https://aaafoundation.org/wp-content/uploads/2017/12/BehavioralAdaptationADAS.pdf
- SWOV. (2022). Electric bicycles and speed pedelecs. https://swov.nl/nl/factsheet/elektrische-fietsen-en-speed-pedelecs
- Tafidis, P., Farah, H., Brijs, T., & Pirdavani, A. (2022). Safety implications of higher levels of automated vehicles: A scoping review. Transport Reviews, 42(2), 245–267. https://doi.org/10.1080/01441647.2021.1971794
- Talebpour, A., & Mahmassani, H. S. (2016). Influence of connected and autonomous vehicles on traffic flow stability and throughput. Transportation Research Part C: Emerging Technologies, 71, 143–163. https://doi.org/10.1016/j.trc.2016.07.007
- Terashima, T., Suzuki, R., & Iwase, M. (2020, December 10–13). Realization of autonomous drive control of power-assisted bicycle [Paper presentation]. 2020 International Conference on Advanced Mechatronic Systems, ICAMechS 2020.
- Townmaking Institute. (2021). Townmaking Institute and T-Mobile join forces for safer eBike traffic in Amsterdam. https://www.townmaking.com/
- Useche, S. A., Alonso, F., Sanmartin, J., Montoro, L. V., & Cendales, B. (2019). Well-being, behavioral patterns and cycling crashes of different age groups in Latin America: Are aging adults the safest cyclists? PLoS ONE, 14(8), e0221864. https://doi.org/10.1371/journal.pone.0221864
- van der Pas, J. W., Marchau, V. A., Walker, W. E., van Wee, G. P., & Vlassenroot, S. H. (2012). ISA implementation and uncertainty: A literature review and expert elicitation study. Accident Analysis & Prevention, 48, 83–96. https://doi.org/10.1016/j.aap.2010.11.021
- van Wee, B., & Banister, D. (2015). How to write a literature review paper? Transport Reviews, 36(2), 278–288. https://doi.org/10.1080/01441647.2015.1065456
- Whitaker, E. D. (2005). The bicycle makes the eyes smile: Exercise, aging, and psychophysical well-being in older Italian cyclists. Medical Anthropology, 24(1), 1–43. https://doi.org/10.1080/01459740590905633
- WHO. (2022, June 7). Cycling and walking can help reduce physical inactivity and air pollution, save lives and mitigate climate change. https://www.who.int/europe/news/item/07-06-2022-cycling-and-walking-can-help-reduce-physical-inactivity-and-air-pollution–save-lives-and-mitigate-climate-change
- Wu, Z. Y., & Lin, H. Y. (2020, January 12–15). Intellibike: An intelligent bicycle with automatic shifting based on sensing and riding analysis [Paper presentation]. 2020 IEEE/SICE International Symposium on System Integration, SII 2020.
- Xie, Z., Jeon, W., & Rajamani, R. (2021). Low-density lidar based estimation system for bicycle protection. IEEE Transactions on Intelligent Vehicles, 6(1), 67–77. https://doi.org/10.1109/TIV.2020.3010728
- Zhang, Y., Zhao, G., & Li, H. (2021). Multibody dynamic modeling and controlling for unmanned bicycle system. ISA Transactions, https://doi.org/10.1016/j.isatra.2021.02.014