
ABSTRACT
The advent of autonomous vehicles (AV) is expected to significantly impact the built environment in the long-term. However, the mechanism through which these effects would occur is not known. This study aims to develop conceptual frameworks in the form of causal loop diagrams to enhance understanding through a systematic scoping review of the literature. The review process followed the PRISMA framework and 82 eligible studies were sourced from the Scopus and Web of Science databases. Data were extracted for six attributes of the built environment (parking, density, land use diversity, destination accessibility, urban sprawl and street design). Both qualitative/speculative and quantitative findings are presented stratified by AV types (i.e. shared-autonomous vehicle and private autonomous vehicles), and geographical contexts (i.e. citywide, suburbs and central business district). The findings show that the long-term effects of AVs on the built environment would not be uniformly distributed across the city and vary by AV types. Built environment effects would occur through changes in accessibility, the redistributive demand for parking spaces and other mechanisms. The study provides a knowledge repository and identifies gaps in knowledge for researchers and practitioners interested in the long-term effects of AVs on the built environment.
1. Introduction
Transportation technologies, such as automobiles and steam engines, have significantly altered the built environment. For instance, a higher demand for parking, urban sprawl and car-oriented urban design has been widely practiced since the human-driven cars have been introduced in most cities (Gehl, Citation2010). These associations have been investigated in various studies (Aston et al., Citation2021; Ewing & Cervero, Citation2010). Their relationships are usually complex, sometime non-linear (Tao & Cao, Citation2022), and depend on several factors such as public policies, transportation costs, socio-demographics, culture, weather, topography, economy and associated technologies.
Likewise, the advent of the autonomous vehicle (AV) may potentially lead to several built environment changes. For instance, experts have speculated that AVs may reduce the demand for parking, encourage urban sprawl and affect road capacity (Gruel & Stanford, Citation2016; Heinrichs, Citation2016). Nevertheless, these impacts may rely on several factors, such as transportation and land use policies, socio-demographics, types of AV operation and their levels of automation.
The operation of AVs is expected to be either as a shared-autonomous vehicle (SAV) or private autonomous vehicle (PAV). SAV systems may be defined as a combination of automated car-sharing and autonomous ride-sourcing systems (Kang & Levin, Citation2021; Narayanan et al., Citation2020). PAVs, on the other hand, will be privately owned by their users, similar like the private cars today (Heinrichs, Citation2016). Both SAV and PAV are likely to be used to reach activity destinations as well as to serve as feeder modes for (first/last mile service) public transport (Heinrichs, Citation2016).
The extent of impacts of AVs on the built environment depends on the driverless capabilities of AVs (Heinrichs, Citation2016). Automation of AVs is currently categorised into 6 different levels according to SAE (Citation2021): level 0 (no driving automation), level 1 (driver assistance), level 2 (partial driving automation), level 3 (conditional driving automation), level 4 (high driving automation) and level 5 (full driving automation). It is expected that changes in the built environment would only occur if AVs are equipped with high/full automation (Heinrichs, Citation2016). For example, empty-cruising to find a parking space is only possible with automation levels 4 and 5.
The various forms of AV operation and automation may distinctly affect the built environment in the long-term. However, the types and extents of these changes as well as the mechanisms through which the effects will occur have only sporadically been reported to date. Furthermore, no systematic synthesis of these effects has been performed yet in the literature. To address this gap, this paper combines a systematic scoping review of the literature synthesising the built environment impacts of AVs, and several conceptual frameworks illustrating the mechanisms by which AV will affect the built environment.
Several literature review papers have previously been published on AVs including intention to use AVs (Keszey, Citation2020), AV acceptance (Jing et al., Citation2020b), AV capabilities, planning and policies (Bagloee et al., Citation2016; Faisal et al., Citation2019; Milakis et al., Citation2017), SAV and urban mobility (Golbabaei et al., Citation2021; Narayanan et al., Citation2020), modelling and simulation techniques for AVs (Hawkins & Nurul Habib, Citation2018; Jing et al., Citation2020a; Li et al., Citation2021) and AV impacts on accessibility and transport equity (Dianin et al., Citation2021). Nonetheless, none of these studies have focused on the built environment impacts of AVs. Moreover, there is limited understanding of the mechanism through which the built environment will likely be affected by AVs, and how this will differ between PAV and SAV, and between urban and suburban regions. This paper aims to conceptualise the mechanisms through which highly/fully AVs are likely to affect the various elements in the built environment and present such findings in an easily understandable manner. Built environment is defined here as the built forms, building types, land uses and open spaces of a city (Lawrence & Low, Citation1990).
Section 2 presents the methodology applied to address the research aim. In Section 3, findings are presented including a general descriptive review of the literature and a quantitative assessment of the extent of the built environment effects. Conceptual frameworks capturing the causal links between AVs and the built environment changes are presented in Section 4 in the form of causal loop diagrams (CLD). The section also outlines gaps in understanding such links. Findings are discussed in research and policy terms in Section 5. The paper concludes with a summary of key findings in Section 6.
2. Methodology
2.1. Search for evidence
A systematic scoping review of the literature was performed to investigate the current state of knowledge regarding the potential impacts of AVs on the built environment. A scoping review aims to identify and map existing evidence, explain concepts, characteristics, methods and gaps in a certain field, and be a precursor for systematic review (Munn et al., Citation2018). The primary difference between a scoping review and a systematic review is that the former does not aim to critically appraise the identified literature on a topic (Munn et al., Citation2018). Finally, a systematic scoping review comprises of a scoping review that follows a systematic framework (e.g. PRISMA framework) (Peters et al., Citation2015).
The study used a systematic approach based on the Preferred Reporting Items for Systematic reviews and Meta-Analyses (PRISMA) framework to search for evidence (Moher et al., Citation2009; Page et al., Citation2021). The PRISMA 2020 statement “provides updated reporting guidance for systematic reviews that reflects advances in methods to identify, select, appraise, and synthesise studies” (Page et al., Citation2021). The PRISMA critical appraisal requirement for systematic review was not included since it is not part of the aims of a scoping review. Two databases were searched to identify relevant articles for this study: Web of Science and Scopus. The search process was carried out in November 2022.
Given that the study focuses on the built environment impacts of autonomous vehicles, the two main search terms as used were: “built environment” and “autonomous vehicles”. However, a range of synonyms of these two terms were also added to ensure that the results are comprehensive. The synonyms for the built environment were derived from the well-known 5D’s concept, which includes density, destination accessibility, design, diversity of land uses and distance to transit (Ewing & Cervero, Citation2010). However, the distance to transit term was replaced by distance to CBD to account for potential AV impacts on residential relocation and commute distances. In addition to the 5Ds, parking was specifically included as a built environment attribute in the search term, which is often overlooked in the land use diversity discussion but has been identified to have a great potential to be affected by the AVs (Gruel & Stanford, Citation2016; Heinrichs, Citation2016). More specifically, the following search terms were used to identify relevant articles, directed to the Title, Abstract and Keywords:
“autonomous vehicles” OR “driverless vehicles” OR “automated vehicles” OR “self-driving vehicles”
AND
“built environment” OR “land use” OR “urban environment” OR “parking” OR “accessibility” OR “density” OR “urban sprawl” OR “city” OR “cities” OR “urban system” OR “urban planning” OR “urban area” OR “urban design” OR “housing” OR “urban form” OR “urban transport” OR “urban development” OR “neighbourhood”
2.1.1. Eligibility criteria
The resultant search outputs were assessed against the following eligibility criteria:
Reported either quantitative or qualitative/speculative findings in relation to the potential impacts of autonomous vehicles on any of the six aforementioned attributes of the built environment.
Provided empirical or simulation results of AVs with levels 4 and/or 5 automation capabilities as classified by SAE (Citation2021).
Studies reporting built environment effects of only land-based AVs (excluding mass transit and freight) are considered eligible.
Only peer-reviewed publications are considered to extract quantitative findings linking AVs and the built environment;
The peer-review status was relaxed to extract qualitative/speculative findings in relation to AVs and the built environment and included peer-reviewed journals, books, conference proceedings and technical reports. However, studies published on website pages, social media and video platforms were not considered eligible for this research;
Only publications written in English and published between 2011 and 2022 are considered eligible. The year 2011 was selected as the initial period because publications prior to this date focused mostly on AV system engineering with little/no studies assessed the built environment impacts of AVs (Gandia et al., Citation2019);
2.1.2. Search outcomes
provides a summary of the search outcomes. The searches in both databases resulted in 3247 potentially eligible studies. These were imported to Endnote, and 1137 duplicates were removed, resulting in 2110 unique records. The titles and abstracts of these studies were screened to check their relevance to the aims of this review based on the eligibility criteria.
Figure 1. Systematic search process based on the PRISMA framework and search outcomes (Page et al., Citation2021).
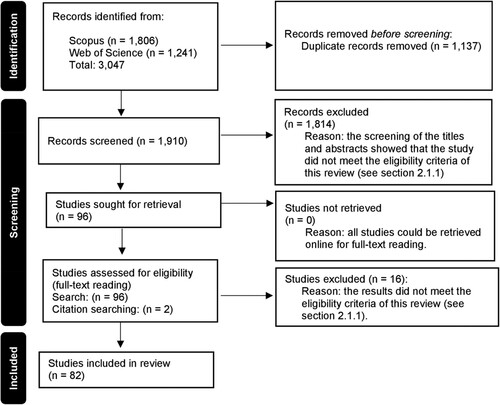
The screening of titles and abstracts resulted in 96 potentially eligible studies for a full-text review. Furthermore, 2 additional studies were included based on the snowballing of the references listed. After full text reading, 16 studies were found ineligible because their findings were not directly related to AV impacts on the built environment. For instance, some reviewed studies provided findings related to AV impacts on traffic (Legêne et al., Citation2020; Shatanawi & Mészáros, Citation2022) and car ownership (Kellett et al., Citation2019; Ostermeijer et al., Citation2019) rather than direct impacts on the built environment. The remaining 82 studies formed the overall sample for this review, including 78 peer-reviewed journal articles, two book chapters, one conference paper and one government technical report (see appendix). An additional 33 references are cited in this paper to provide contextual background and methodological justification.
2.1.3. Data extraction
The data extracted from each literature source comprised of study location, study objectives, analytical method, sampling method, model assumptions, scenarios, geographic context, AV types, studied built environment indicators, and the qualitative/quantitative links between AV types and the built environment dimensions. The first, second, and third authors respectively extracted, reviewed and validated the data. The findings are stratified by six built environment dimensions, three AV types (SAV, PAV, mixed AV), and three geographic contexts (CBD, suburbs and citywide), resulting in 54 individual tables, which were later merged for the efficiency of presentation. The three geographical contexts broadly capture the findings of studies that simulated separated scenarios for city centres and suburban areas. The “citywide” category represents studies that have made no distinction between city centre and suburban areas. Any of the six built environment dimensions considered in this study can be represented by many indicators. For example, density can be represented by employment density, dwelling density, population density, floor-area ratio and building height. As a result, it was necessary to define various indicators used to extract the built environment data for this study, as shown in .
Table 1. Indicators used to extract data for each built environment dimension.
2.2. Data analysis: derivation of causal loop diagrams
Causal loop diagrams (CLD) are developed to synthesise the identified relationships between AVs and the built environment. CLD is a method of visualising the relationships and causal effects among key variables. This method was first adopted to analyse a feedback system in the field of cybernetics (Magoroh, Citation1963). It has also been used in transportation (Gruel & Stanford, Citation2016; Sterman, Citation2000). CLDs are composed of three elements: the names of the variables; the causal links that are represented by arrows linking the independent variable to the dependent variable; and a positive or negative sign indicating the nature of the relationship. This method has already been applied to assess the long-term effects of autonomous vehicles adoption on traffic flow (Emberger & Pfaffenbichler, Citation2020; Gruel & Stanford, Citation2016). However, no CLD has been developed to analyse AV impacts on the built environment.
The quantitative results reported in the section 3 are represented in the CLDs using different colours and signs in the arrows. A blue arrow represents a dominant set of quantitative results found in the literature. It means that all reviewed studies reported consistent findings in terms of the direction of impacts (i.e. all the reported impacts were either positive or negative). A yellow arrow represents a divergent set of results for a specific relationship. A red arrow represents a research gap. This means that existing studies have not yet studied the indicated relationships. In the CLDs, a positive sign means that an increase in the independent variable will lead to an increase in the dependent variable, and a negative sign means an inverse relationship. A total of 9 CLDs are developed in this study, one for each of the three types of AVs and three geographic contexts, outlining the causal mechanisms of AV impacts on the built environment. The detailed colour coding of the results is provided as a supplementary material.
3. Results
Among the 82 studies reviewed, 46 applied mathematical simulations, 12 conducted empirical investigation using data collected through surveys and/or interviews with experts and 24 studies proposed frameworks, design guidelines or policies based on the literature. The case studies investigated in these studies were drawn from various cities across the world: 25 from North America, 15 from Europe and 13 from Asia and Oceania. The remaining 29 studies do not focus on any specific geographical context. The 82 studies included in this review are presented in appendix together with the methods applied, built environment indicators studied, and contextual focus.
Findings are presented under the following headings: parking, urban density, destination accessibility, distance to CBD, urban design and diversity of land uses. Quantitative results demonstrating a specific scale of land use impacts are synthesised in . Results were disaggregated by AV type (i.e. SAV, PAV and mixed-mode), and city location (i.e. central business district, suburbs and citywide) to better represent the scenarios found in the literature. Quantitative findings are presented in tandem with qualitative/speculative findings.
Table 2. Quantitative impacts of AVs on parking.
Table 3. Quantitative impacts of AVs on residential and employment densities.
Table 4. Quantitative impacts of AVs on destination accessibility.
Table 5. Quantitative impacts of AVs on distance to central business district.
3.1. Parking
Autonomous vehicles are expected to significantly reduce the demand for both curbside and off-street parking since autonomous car-sharing and ride-sharing schemes tend to reduce car ownership (Legacy et al., Citation2018). In addition, AVs may be capable of cruising empty for vacant parking spots in suburban areas, or even move back to residential home garages (Milakis et al., Citation2017; Millard-Ball, Citation2019). This may enable the replacement of parking spaces by other land uses in high-density areas, such as affordable housing (Riggs et al., Citation2020; Yigitcanlar et al., Citation2019) and commercial services (Hawkins & Nurul Habib, Citation2018). For buildings, the total costs of construction may drop by −20 to −25% if structural parking is no longer needed due to the replacement of human-driven vehicles by SAV systems and PAVs (Riggs et al., Citation2020). list the impacts of AVs on parking.
3.1.1. Shared autonomous vehicles & parking
The results suggest that if SAVs become dominant, the demand for parking may significantly drop. Fagnant and Kockelman (Citation2014) estimated that each SAV can replace up to eleven human-driven vehicles. Moreover, Zhang and Guhathakurta (Citation2017) found that each SAV has the potential to eliminate up to 20 parking spaces due to the reduction of car ownership, higher vehicle utilisation and occupancy rates. Parking demand in suburbs may significantly rise due to the empty cruising of AVs in search for vacant parking slots (Milakis et al., Citation2018; Zhang & Guhathakurta, Citation2017). Nonetheless, a simulation study in Okinawa, Japan, found that parking spaces at the periphery may drop by 94% owing to more efficient vehicle utilisation in a scenario with travel demand completely served by a SAV fleet (Kumakoshi et al., Citation2021).
3.1.2. Private autonomous vehicles & parking
Regarding PAVs, the potential impacts on parking are more unclear. PAVs are expected to reduce parking demand in CBDs due to their ability of cruising empty to low-density suburbs (Chapin et al., Citation2016; Kang et al., Citation2022), where parking spots are often more vacant, free or cheaper than the CBD. Kang et al. (Citation2022) estimated that, approximately, 25−32% of current parking areas could be repurposed owing to PAV capability of parking at their origins. Furthermore, the adoption of PAVs may increase vehicle ownership owing to lower acquisition and operational costs compared to human-driven vehicles in the long-term (Shatu & Kamruzzaman, Citation2022). Moreover, car ownership may also rise due to the inclusion of new users who are unable to drive, such as the elderly, disabled people and children (Chapin et al., Citation2016; Fox, Citation2016; Truong et al., Citation2017). Higher individual car ownership normally leads to higher demand for parking. For instance, Zakharenko (Citation2016) forecast an overall increase of 7.4% in parking demand in a scenario with solely single-user PAVs, and, thereby, assuming an increase in car ownership. On the other hand, fully-automated PAVs may provide higher flexibility for household vehicle sharing, which may eventually contribute to a reduction in household vehicle ownership and parking demand (Bin-Nun & Binamira, Citation2020). For instance, Zhang et al. (Citation2018) estimated a car ownership reduction of between 9.5 and 12.3% due to sharing of PAV’s within households in Atlanta, USA.
3.1.3. Off-Street car parks
Off-street parking design for both SAVs and PAVs are expected to generate a more efficient use of space compared to current car-parks (Bischoff et al., Citation2019; Fraedrich et al., Citation2019; Heinrichs, Citation2016). AV car-parks will allow, for instance, more tight distances between side doors, and multiple rows of vehicles stacked, as passengers will not need to access and egress the vehicles on the parking slot since an automated valet systems may be implemented (Azevedo et al., Citation2020; Nourinejad et al., Citation2018). Moreover, ramps and aisles will be replaced by lift shafts, reducing parking lot heights and increasing parking density (Heinrichs, Citation2016). As a result, these high-density AV off-street car-parking layouts are estimated to increase parking capacity from 50% (Azevedo et al., Citation2020; Kong et al., Citation2018) up to 87% (Nourinejad et al., Citation2018).
3.2. Urban density
Several studies have discussed the impacts of AVs on urban density (). Research suggests that residential and employment densities in city centres and suburbs will be affected by AVs in different ways. Reductions in parking space demands in city centres will permit more housing and commercial land uses, creating denser urban cores (Llorca et al., Citation2022; Milakis et al., Citation2018; Stead & Vaddadi, Citation2019), whereas suburban and exurban areas will likely face more urban sprawl and lower residential density development owing to lower disutility of travel time, and lower transportation costs (Duarte & Ratti, Citation2018; Gelauff et al., Citation2019; Heinrichs, Citation2016; Hiramatsu, Citation2022; Kyung-Hwan et al., Citation2015; Moore et al., Citation2020). Interestingly none of the modelling studies considered the potential contribution to density caused by the replacement of parking by other land uses, and only two considered home relocation caused by lower disutility of time, and lower transportation costs (Gelauff et al., Citation2019; Hiramatsu, Citation2022).
3.3. Destination accessibility
All quantitative impacts of AVs on destination accessibility are presented in . Overall, studies found that the expected increases in travel utility caused by AVs will primarily benefit suburban and exurban areas by enhancing job accessibility, this may consequently drive urban sprawl in cities (Childress et al., Citation2015; Cohen & Cavoli, Citation2018; Gruel & Stanford, Citation2016; Meyer et al., Citation2017; Nadafianshahamabadi et al., Citation2021; Wellik & Kockelman, Citation2020). An empirical study in Dallas, Texas, USA, found that up to 68% more urban sprawl is projected due to increases in accessibility in suburbs (Moore et al., Citation2020). This effect tends to be more significant for low-income residents (Ahmed et al., Citation2020; Kim et al., Citation2020; Nahmias-Biran et al., Citation2020; Zhou et al., Citation2021) and suburbs surrounding highways (Cordera et al., Citation2021). Some studies also reported increases in accessibility in city centres and surrounding neighbourhoods (Dianin et al., Citation2021; Kang & Kim, Citation2019). For scenarios with PAV and SAV operating together, accessibility increase was the dominant result citywide.
Regarding CBD accessibility impacts, relationships varied by AV modes. For PAV only, accessibility was found to increase between 17 and 187% (Cordera et al., Citation2021). For SAVs only, accessibility changes varied from −4 to 21% (Zhong et al., Citation2020). For scenarios with PAVs and SAVs together, negative accessibility variations were found in two different studies owing to factors, such as increases in average journey times and higher empty-cruising travel demand (Cordera et al., Citation2021) and lower consumer surplus (Nahmias-Biran et al., Citation2020).
Accessibility variation in suburbs were found to be primarily positive for PAVs (Cordera et al., Citation2021) and divergent for SAVs (Zhong et al., Citation2020). For the mixed AV mode scenarios, accessibility significantly decreased in the periphery (Cordera et al., Citation2021). Moreover, Zhou et al. (Citation2021) found that SAVs can increase overall accessibility in Singapore solely if private vehicles can coexist. These results indicate that PAVs tend to benefit suburban accessibility more than SAVs. Therefore, if PAVs become dominant in suburbs, a significant accessibility increase is expected; consequently, further urban sprawl may occur. However, experts have claimed that induced travel demand may offset these potential long-term accessibility gains by increasing congestion, and, consequently, travel time (Milakis et al., Citation2018).
3.4. Distance to CBD
Distance to CBD is an important measure to comprehend how sprawled and connected to downtown a city is (Carroll et al., Citation2021). An increasing distance from home to CBD normally means more urban sprawl. The quantitative impacts of AVs on distance to CBD are presented in . Most studies found positive correlations between AV availability and willingness to relocate home further from city centres (Bansal & Kockelman, Citation2018; Guan et al., Citation2021; Nodjomian & Kockelman, Citation2019). These findings support the aforementioned AV impacts on urban density leading to denser urban cores and more sprawled suburbs. As a consequence of this trend, population density in the middle suburbs may be significantly reduced.
Similar to the empirical studies, modelling results () also showed that distance to the CBD would overall increase after the implementation of AV systems. Like trip distance, Llorca et al. (Citation2022) predicted an increase of about 8% in the average commute time to the CBD. These increases in both commute distance and time to the CBD are driven primarily by the assumption of potential reductions in the disutility of travel time that AVs may allow, which may encourage residents to live further away from work and travel longer distances. Also, Liu et al. (Citation2021) found that higher automation levels may lead to an increase in average travel time if the highway capacity is less elastic than the value of travel time for on-demand AVs. However, potential improvements in road capacity and traffic flow may contribute to counterbalance these effects. For instance, Szimba and Hartmann (Citation2020) found that AV automation levels 4 and 5 may, respectively, reduce average commute time by 20 and 27%. Lastly, Larson and Zhao (Citation2020) estimated a reduction of 4.2% in the city radius if SAVs become dominant and no parking lots are available.
3.5. Urban design
Urban design features, such as sidewalks, cycle lanes, car lanes, block sizes and street network density might be significantly reshaped due to the introduction of AVs. AVs will impact rights-of-way, travel lanes and intersections (Fraedrich et al., Citation2019; Riggs et al., Citation2020).
Experts suggest that AVs may overall increase safety for pedestrians and cyclists in the long-term (Botello et al., Citation2019). Nevertheless, lane segregation by mode, and multi-level crossing with AVs and non-motorised modes may be necessary to ensure safety and appropriate AV traffic flow (Botello et al., Citation2019). Segregated street platform spaces for SAV drop-off and pick-up lanes, autonomous delivery services and curbside parking may also be necessary (Fayyaz et al., Citation2022). Survey results show that the possibility of AV lane segregation seems to be the most important factor to encourage AV adoption (Carrese et al., Citation2019). However, AV-only lanes may also hinder walkability (Botello et al., Citation2019). For instance, a modelling study in Vienna, Austria, found that the implementation of PAVs and SAVs may negatively impact street compatibility with pedestrians and cyclists at city centres due to increases in traffic volume (Soteropoulos et al., Citation2021). Nevertheless, compatibility improvements were found in suburban areas, especially for SAVs with stop-based services rather than door-to-door (Soteropoulos et al., Citation2021).
The implementation of AVs may positively affect road capacity due to platooning technology (Heinrichs, Citation2016). Potential growth in ride-share adoption using SAV systems may also contribute to enhancing road capacity. For instance, according to Liu et al. (Citation2022), a single SAV has the potential to substitute 3.8 private human-driven vehicles if ride-sharing is available in conjunction with a car-sharing service. On the other hand, road capacity may also be negatively affected by AVs. For instance, Miller and Kang (Citation2019) argue that AVs may reduce road capacity as operators will feel more comfortable without the burden of driving, which it may contribute to reducing the value of travel time and generate more traffic. Furthermore, potential increases in vehicle ownership and VMT due to lower costs of vehicle acquisition, maintenance and insurance as well as lower disutility of time, remote parking and trip generation from people unable to drive may offset potential road capacity gains due to AVs (Chapin et al., Citation2016; Emberger & Pfaffenbichler, Citation2020).
3.6. Diversity of land uses
AVs may also significantly affect land use mix. For instance, the potential decrease of parking demand in the city may transform current parking spaces into commercial, residential and mixed-use hubs (Hawkins & Nurul Habib, Citation2018). Furthermore, the introduction of AVs tends to attract more commercial land use to suburbs due to accessibility gains. According to Bridgelall and Stubbing (Citation2021), the average trip rate for commercial land use might triple by 2050, and commercial land use may shift towards lower density suburbs. According to Kumakoshi et al. (Citation2021), commercial land use area may increase by 35% owing to parking reductions after the introduction of SAVs. On the other hand, a simulation study in Seoul, found that commercial land use area may significantly decrease in a scenario with fully autonomous SAVs, whereas industrial and residential land use areas tend to largely increase (Kang & Kim, Citation2019).
Researchers have suggested that AVs may firstly be adopted in single-use zones rather than mixed-use areas (Nodjomian & Kockelman, Citation2019). This is due to the potential reduction in the disutility of travel, and higher accessibility, especially for those who currently need to commute long distances by human-driven vehicles. It has also been suggested that some land uses will become obsolete due to the adoption of AVs while some new uses will be created. For instance, it will be necessary to implement local depots for the cleaning, maintenance, charging and repairs of SAVs in service (Heinrichs, Citation2016). Charging stations may function as mobile office locations, gas station and private garages will be replaced by other uses (e.g. shops, schools, etc.) (Yigitcanlar et al., Citation2019), and car-park area will be significantly reduced (Zhang & Guhathakurta, Citation2017).
4. Conceptual framework
The findings presented in the previous sections are presented in this section in the form of a conceptual framework using causal loop diagrams. This framework presents the researcher’s own perceptions about the scope and structure of a problem based on research findings (Adelman, Citation1997). It also facilitates comprehension of the current state of knowledge and by highlighting omissions in published literature as identified gaps yet to be researched. The framework also allows an assessment of several mechanisms that will drive changes in the built environment.
4.1. Central business district
The impacts of AVs on the CBD built environment are illustrated in CLDs for PAV ((a)), SAV ((b)) and mixed-AV mode scenarios ((c)). SAV is expected to reduce parking, making space available for other uses notably commercial and residential. An increase in commercial land would generate more employment in the CBD, and, consequently, employment density would increase. Similarly, an increase in residential land is likely to increase residential density. Existing SAV impacts on accessibility in the CBD are conflicting, and more studies are needed to comprehend this relationship. If accessibility increases, commercial land use and job density tend to increase. Finally, higher employment density may require higher street network density (i.e. total street area divided by the total area of the suburb) to address the rise in travel demand by commuting vehicles. On the other hand, more residential density in city centres may allow more transit use, walking and cycling to work, what may eventually counterbalance the demand on the street network. Overall, the effects of SAV on street networks and intersection densities are not known yet.
Figure 2. Built Environment Impacts for Central Business Districts. SAVs, PAVs, SAVs + PAVs.
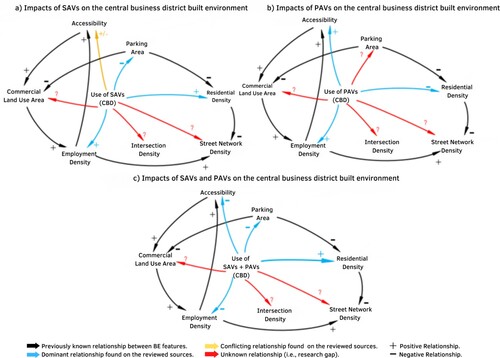
The relationship between the use of PAVs and residential density in city centres is negative, and it may eventually increase demand on the street networks due to more commuting trips. Furthermore, PAV tends to provide more accessibility in the CBD, which will eventually lead to more commercial land uses and employment density. The direct effect of PAVs on CBD parking is still unknown. However, it can be implied that PAVs may reduce demand for parking in the CBD if empty-cruising is possible. If parking demand reduces, there will be vacant land to develop more dwellings and commercial land use.
When SAV and PAV are combined ((c)), decreases in parking demand, accessibility and employment density were found, whereas other effects are still unknown. Less accessibility means less opportunities to access commercial land use, what may explain the reduction in employment density when both modes are operating together in the CBD.
4.2. Suburbs
The impacts of AVs on the suburban built environment are illustrated in the CLDs for PAV ((a)), SAV ((b)) and mixed-AV mode ((c)). SAVs may likely reduce parking area in suburbs and subsequently free up spaces to develop other land uses. However, results for SAV impacts on residential density in suburbs are divergent. It is also not clear yet how accessibility will be impacted by SAVs on suburban areas.
Figure 3. Built Environment Impacts for Suburbs. SAVs, PAVs, SAVs + PAVs.
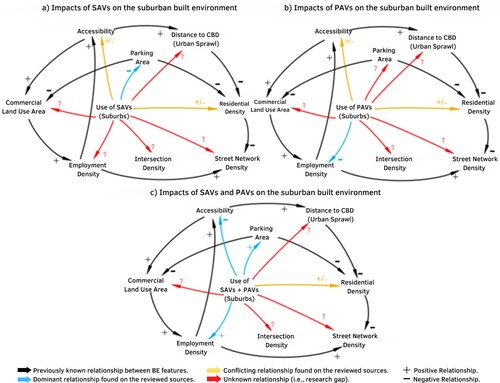
The results for the relationship between PAV and residential density are also divergent. However, it is known that PAVs tend to reduce suburban employment density. This may subsequently act to reduce street network density. Results for accessibility are conflicting, and the impacts on other variables are still unknown limiting the assessment of other indirect effects. For mixed-AV modes, (c) shows that parking area and employment density are likely to increase, whereas accessibility tends to decrease. More parking and less accessibility mean less likely to develop commercial land use area, which will eventually reduce employment density and street network density.
4.3. Citywide
Most studies used citywide scenarios in order to assess the broader impacts of SAV ((a)), PAV ((b)) and mixed-AV mode scenarios ((c)). Overall, the use of SAVs may likely decrease parking area in cities. Hence, there may be more vacant lands to increase residential and commercial land use densities, and eventually free up street spaces. Accessibility tends to decrease with SAVs across the city; this would drive more urban sprawl. Nevertheless, there were conflicting findings on the direct impacts of SAVs on the average distance to CBD, indicating that urban sprawl may not be a dominant trend for SAVs on cities.
Figure 4. Citywide Built Environment Impacts. SAVs, PAVs, SAVs + PAVs.
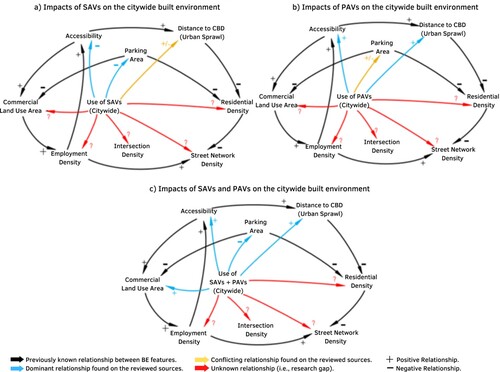
(b) shows that urban sprawl will likely be the dominant trend with PAVs across the city due to improved accessibility level. This trend is confirmed by the positive direct relationship between the use of PAVs and distance to CBD. More urban sprawl will eventually lead to lower residential density, and more street network density. On the other hand, the effects on parking are not clear yet, and may depend on the scenario settings (e.g. induced demand, car ownership, possibility of empty-cruising, off-street car-park layouts).
(c) indicates four dominant relationships in case of mixed AV scenarios across the city. Whereas accessibility, distance to CBD and commercial land use area will likely increase, parking area tends to decline citywide. Increases in the average home distance to the CBD leads to a lower residential density. However, the elimination of parking may induce more housing development. More accessibility and less parking also favour more commercial developments; this will eventually increase employment density citywide, and induce street network expansion.
4.4. Research gaps and directions for future research
Several research gaps were found in this review. These are unknown quantitative relationships between AVs and the built environment and are highlighted in the causal loop diagrams using red arrows and question marks. Overall, no quantitative result was found for AV impacts on intersection density and street network density. In city centres and suburbs, it is also unknown how AVs will quantitatively impact commercial land use areas. There are speculative studies that forecast the replacement of vacant parking land by commercial land use in suburbs and city centres, but these impacts have not been quantified yet. Furthermore, no quantitative result was found for PAV impacts on parking areas in city centres and suburbs. Also, it is unknown how average commute distances between suburbs and CBD will be affected by SAV, PAV and mixed-AV mode scenarios. Other research gaps include SAV impacts on employment density in suburbs, mixed-AV mode impacts on residential density in suburbs and AV impacts on residential density citywide. Thus, future research is needed to fill these gaps in knowledge.
Results were considered divergent when the findings are conflicting to each other in assessing the impacts of a particular type of AVs on a specific built environment attribute. For example, SAV impacts on accessibility in the CBD were reported to be both positive and negative depending on scenario assumptions in Zhong et al. (Citation2020). Likewise, divergent accessibility results were found for SAVs (Zhong et al., Citation2020) and PAVs (Cordera et al., Citation2021) in suburbs for different scenarios. Citywide, divergent results were found for SAV impacts on distance to CBD, and PAV impacts on parking. Therefore, more studies are needed on these relationships to draw a precise conclusion.
5. Discussion
5.1. How to manage AV impacts on parking?
5.1.1. Replacement of vacant parking land
AVs are expected to significantly reduce the demand for parking, especially if SAV becomes the dominant mode (Kumakoshi et al., Citation2021; Zhang & Guhathakurta, Citation2017). This potential reduction of parking demand may allow the replacement of obsolete parking land by other land uses. Zoning policies should be updated to introduce these potential changes. For instance, minimum parking requirements for businesses in city centres may be replaced by minimum drop-off and pick-up areas, and charging spot requirements. Furthermore, car-park design standards should be adapted to allow layouts with less aisles, multiple rows of stacked vehicles and robotic valet.
Moreover, zoning policies should also consider to encourage the replacement of future vacant parking lands by affordable housing to accommodate the potential population relocation from middle suburbs to city centres and outer suburbs. On the other hand, potential vacant housing land in middle suburbs may need to be replaced by AV car-parks and charging stations.
In order to guide policy-makers and researchers in the public parking renewal process in the AV era, Xia et al. (Citation2021) proposed a research framework based on four key issues: “how much to renew (i.e. demand forecast analysis), when to renew (i.e. update time series evaluation), what to renew (i.e. function replacement decision), and how to update (i.e. design empirical research)”. The findings presented in this study highlight the need to include a fifth component in this framework, “where to renew”, given that the demand for parking varies between different parts in a city.
While a number of urban redevelopment options emerge from AV induced parking reduction it should also be stressed that there is a potential danger caused by empty parking lots that are not redeveloped. They could induce a degree of “obsolescence” and potential economic decline if not redeveloped for new uses. Policy makers need to be aware of these risks and be ready to implement new uses promptly.
5.1.2. Empty-cruising and congestion pricing
Empty-cruising may lead to higher parking demand in suburbs and act to increase traffic congestion (Millard-Ball, Citation2019; Silva et al., Citation2022; Zhang & Wang, Citation2020). Millard-Ball (Citation2019) estimated that empty-cruising costs are 90% cheaper than hourly parking costs in dense areas, which may encourage AVs to search for free parking in suburban areas. Moreover, if free parking slots are not available and their prices exceed cruising costs, PAVs may choose to not park, and continuously circulate until their owners request a new ride (Millard-Ball, Citation2019). In this scenario, PAVs would likely choose to circulate at low speeds to minimise travel costs, and, therefore, more congestion might occur. Millard-Ball (Citation2019) suggests that congestion pricing should be introduced to mitigate these issues. Likewise, experts have emphasised the need to implement access restrictions for both empty and single-occupant AVs in city centres to mitigate congestion and parking demand (Nogues et al., Citation2020). However, Zakharenko (Citation2016) suggested that congestion pricing should be applied solely to commute trips. The author argues that congestion pricing for empty-cruising of AVs would force empty AVs to park in downtown areas, which would offset potential parking demand reductions and welfare gains in CBD areas (Zakharenko, Citation2016).
5.1.3. Empty-cruising, equity and traffic
If demand for suburban parking spaces increases, transportation and land use equity issues may emerge in suburbs, such as the inefficient use of valuable land parcels and increasing traffic congestion (Zhang & Wang, Citation2020). In addition, if SAVs go mainstream, new curbside pick-up and drop-off spots will be needed (Stead & Vaddadi, Citation2019; Zhang & Wang, Citation2020). These new spots may eventually replace some of the existing on-street parking and transit stops (Fayyaz et al., Citation2022; Gonzalez-Gonzalez et al., Citation2019). Fayyaz et al. (Citation2022) estimate that an average of 1.4 curbside parking spots will be required to serve every 100 trips at peak hours, and should be located every 30 m. In addition, empty-cruising SAVs may increase VMT and congestion (Winter et al., Citation2021). However, these issues may be mitigated with appropriate SAV parking management strategies, such as the implementation of restricted dedicated SAV systems throughout the network, and parking relocation algorithms (Winter et al., Citation2021). For example, Overtoom et al. (Citation2020) found that the adoption of SAV drop-off-and-ride facilities nearby transit stations is an effective measure to reduce traffic delays and congestion nearby transit stations for a SAV penetration rate of at least 25%.
5.1.4. Empty-cruising and waiting time
Another important issue related to PAV is the potential elimination of walking from parking spots to the final activity location, since drop-off may occur closer to destinations (Bahk et al., Citation2022). However, this will also introduce pick-up waiting times for PAV owners similar to ride-sourcing services, especially at CBD destinations. This may occur because PAVs tend to find cheaper parking, which are usually available outside high-density areas, and this may lead to higher travel times, and, consequently, longer pick-up waiting times (Bahk et al., Citation2022). Although PAV owners will be able to track the exact locations of their vehicles in real-time, for journeys with a short stay at destinations as well as for urgent and unplanned trips, the proximity of the vehicle to the owner tends to play a more critical role, and therefore the willingness-to-wait tends to be lower. Therefore, a very complex set of trade-offs among willingness-to-pay, willingness-to-wait and willingness-to-walk will be critical to determine PAV adoption, future demand for parking spaces and regulating policies (Bahk et al., Citation2022).
5.1.5. Park-and-ride
Demand for car-parks nearby transit stations tend to decrease since AVs may replace park-and-ride with drop-off-and-ride (Overtoom et al., Citation2020; Zhang & Wang, Citation2020). Hence, AVs may operate as a feeder system for public transportation, which may mitigate first-mile and last-mile transit accessibility issues compared to human-driven cars (Ahmed et al., Citation2020). Policy-makers should consider to update zoning policies to plan the replacement of future obsolete park-and-ride land by other land uses, such as affordable housing, green areas and businesses.
5.2. How to mitigate AV effects on urban sprawl?
Density benefits in city centres seem to depend very much on economic conditions. The positive density effects in city centres found in this research depend very much on the conversion of land from parking to residential and commercial land uses. This should normally be driven by urban economics as land prices in CBD’s are often higher than other zones. However, an economic downturn would be an unfortunate timing for CBD parking removal as this land might become derelict affecting long term CBD economic performance.
A great challenge ahead is to find the right balance in allowing the penetration of PAVs and SAVs to reduce urban sprawl. Overall, SAVs seem to be more beneficial than PAVs in this regard. However, their penetration level in low-density suburbs will likely rely on their operation model and costs. In a free market, SAVs may be more feasible in high-density areas, whereas people who live in suburban areas with a lack of employment opportunities seem to have a higher willingness-to-pay for PAVs (Nodjomian & Kockelman, Citation2019). Thus, public policies will be needed to subsidise SAV penetration in suburban areas to prevent urban sprawl. For instance, city governments can partner with SAV operators to connect SAVs to mass transit as a feeder system to solve first/last mile issues. This could be done through an integrated Mobility as a Service platform. Furthermore, congestion pricing for commuting PAVs, and transit-oriented mixed-use developments in suburban areas may also shift demand from PAV towards SAVs.
5.3 How to adapt cities to accommodate AVs?
5.3.1 Street design
Planners and policy-makers should consider revising current street design guidelines to account for AV impacts. Less street space for cars may be possible due to traffic efficiency gains caused by platooning technology (Yigitcanlar et al., Citation2019). Feasible road lane width requirements may be reduced from the current 3.0m-3.5 m to 2.45m–2.75 m (Fayyaz et al., Citation2022; Lee et al., Citation2022). Furthermore, other road geometric design features, such as vehicle stopping and passing sight distances, and lateral clearance on horizontal curves may be significantly reduced (Othman, Citation2021). These potential reductions in urban spaces for cars may permit wider sidewalks (Riggs et al., Citation2020), and more flexible use of road infrastructure, such as pedestrian-only zones or public transport lanes at specific times of the day (Stead & Vaddadi, Citation2019).
5.3.2. Crossings, pavement and utilities
Intersections, traffic signage and signalisation may also be significantly impacted by AV wireless and real-time information technology (Chapin et al., Citation2016). If AV level 5 goes mainstream, intersections will no longer require traffic stop signs (Fraedrich et al., Citation2019), and safety barriers (Stead & Vaddadi, Citation2019). Less traffic signage will also free up space on sidewalks that could be replaced, for instance, by urban amenities. However, traffic flow issues with non-motorised modes at intersections with no traffic lights may require the construction of either overhead or underpass pedestrian and cyclist infrastructure (Heinrichs, Citation2016), which will eventually lead to potentially unfundable infrastructure costs.
Furthermore, the costs of replacing or moving utility infrastructures may be prohibitively high, particularly on a city network wide scale (Fayyaz et al., Citation2022). For instance, Othman (Citation2021) points out that current bridge design standards are not safe to allow autonomous truck platoons. Besides, pavement deterioration may be intensified due to the elimination of the wheel wander by AV lane keeping systems (Othman, Citation2021). Consequently, existing overhead structures and pavements may need to be rebuilt or strengthened to allow autonomous vehicles; a significant additional cost to cities.
A potential alternative to diminish the need for pedestrian crossing structures is to limit AV traffic flow to arterial streets and freeways. Consequently, solely non-motorised and public transit modes would be allowed on local and collector streets forming pedestrian-friendly superblocks. A superblock policy of this kind has been initially implemented in Barcelona, Spain, in 2019, providing more walkability and significant health benefits (Mueller et al., Citation2020). For instance, Lee et al. (Citation2022) proposed a patchwork urban design concept in Seoul, South Korea, where several superblocks are designated solely for AVs and non-motoried modes. This concept also proposes that the AV-only superblocks will be connected by major roads with segregated lanes for human-driven lanes, AVs and public transportation. Furthermore, some minor roads may solely allow human-driven vehicles and non-motorised modes. Likewise, a study in Melbourne, Australia, proposed urban design guidelines for AV implementation in suburban and urban areas, including AV-only lanes, drop-off and pick-up spots nearby transit hubs, replacement of parking spaces by charging stations and bike lanes, and an intelligent transportation system in major crossings to provide real-time information for AVs regarding pedestrians and cyclists (Manivasakan et al., Citation2021). These design guidelines presented positive impacts on safety, accessibility and traffic efficiency.
5.3.3. Intersection density
Intersection density is another critical built environment feature related to urban design. The higher the intersection density, the higher the walkability levels (Ewing & Cervero, Citation2010; Frank et al., Citation2010). Studies have found that high intersection density favour SAV adoption (Nodjomian & Kockelman, Citation2019; Wang & Zhang, Citation2021). Nevertheless, no quantitative research has been found regarding the potential impacts of AVs on intersection density. It is critical, for example, to investigate how intersection density will affect AVs and other modes in scenarios with no traffic lights at intersections. A growing need for grade separated pedestrian crossing infrastructure may lead policy-makers to increase the distance between pedestrian crossings in highways. As a result, it may eventually reduce intersection density, and, consequently, walkability may be negatively affected.
6. Conclusion
Sporadic knowledge is being generated about the long-term effects of autonomous vehicles (AVs) on the built environment across the world. This study is a first attempt to synthesise this knowledge. This paper aims to conceptualise why these effects occur and how. As such, the study presented nine causal loop diagrams explaining the chain of AV effects on the built environment, their directions and magnitudes (where available), based on three types of AVs (private, shared and both), and three different geographical contexts (CBD, suburb and citywide).
The findings of this paper present both opportunities and challenges for cities to improve sustainability in the long-run. While the effects of SAVs on the built environment seem more positive, PAVs would negatively affect the sustainability of cities. For example, SAVs may likely contribute to increasing residential and employment densities in the CBD. An increasing residential/employment density has been identified to have a significant positive effect on the society (e.g. crime, social interaction and trust) (Twinam, Citation2017), environment (e.g. less greenhouse gas emissions, water and land conservation) (Norman et al., Citation2006), economy (e.g. more sales, jobs, innovation, productivity) (Steiner, Citation1994) and public health (e.g. less obesity and cardiorespiratory diseases) (Sallis et al., Citation2016). In contrast, PAVs may likely contribute to intensifying urban sprawl in suburban and rural areas.
The causal loop diagrams provide an opportunity to derive effective policy measures both to capitalise the benefits and address the challenges of AVs. It would help to understand the flow on effects of such policies. They can be developed at the upper level to address/promote a range of consequences downstream or at the lower level to address/promote specific consequences. For example, allowing empty cruising for PAVs at the upper level would free up parking space for the CBD, which would subsequently encourage residential and commercial development. Furthermore, the development of the causal loop diagrams also helps us to identify the many unknowns in the literature concerning the long-term effects of AVs on the built environment. Although an attempt is made to fill-in the diagrams based on related literature, there remain gaps. For instance, future research is needed to comprehend AV impacts on urban design features, such as intersection density, intersection weaving (i.e. removal of traffic lights), street network density, and pedestrian, cycling and transit rights-of-ways. Furthermore, research is needed to comprehend how infrastructure utilities, pavement and urban amenities will be affected by AVs. Other research gaps are the impacts of AVs on land use mix, and SAV feasibility to tackle first/last mile issues.
A limitation of this review is the speculative nature of most of the reviewed sources due to a lack of large-scale empirical data from AVs in operation. Furthermore, most quantitative studies used different assumptions, models and indicators, making direct comparison problematic. In addition, this systematic scoping review did not consider the impacts of flying autonomous taxis and autonomous mass transit systems (e.g. autonomous bus, train and tram) on the built environment. Also, this review solely considered results for AVs with high levels of automation (i.e. levels 4 and 5) in the long-term. Some relevant AV features discussed in this review, such as driverless ride-sourcing, empty-cruising and driverless self-parking are only suitable for levels 4 and 5. Nevertheless, future studies may attempt to address this limitation by investigating potential distinctive effects on the built environment for level 3, and, separately for levels 4 and 5. Lastly, the vast majority of the literature is concentrated in North America, Asia, Europe and Oceania (see appendix); therefore, the results of this systematic scoping review may not be adequate for cities in other geographic contexts.
Supplemental Material
Download MS Word (40.2 KB)Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Funding
References
- Adelman, L. (1997). Handbook for evaluating knowledge-based systems: Conceptual framework and compendium of methods. Springer Science+Business Media, LLC.
- Ahmed, T., Hyland, M., Sarma, N. J. S., Mitra, S., & Ghaffar, A. (2020). Quantifying the employment accessibility benefits of shared automated vehicle mobility services: Consumer welfare approach using logsums. Transportation Research Part A: Policy and Practice, 141, 221–247. https://doi.org/10.1016/j.tra.2020.09.002
- Aston, L., Currie, G., Delbosc, A., Kamruzzaman, M., & Teller, D. (2021). Exploring built environment impacts on transit use – an updated meta-analysis. Transport Reviews, 41(1), 73–96. https://doi.org/10.1080/01441647.2020.1806941
- Azevedo, J., D'orey, P., & Ferreira, M. (2020). High-density parking for automated vehicles: A complete evaluation of coordination mechanisms. IEEE Access, 18, 43944–43955. https://doi.org/10.1109/ACCESS.2020.2973494
- Bagloee, S. A., Tavana, M., Asadi, M., & Oliver, T. (2016). Autonomous vehicles: Challenges, opportunities, and future implications for transportation policies. Journal of Modern Transportation, 24(4), 284–303. https://doi.org/10.1007/s40534-016-0117-3
- Bahk, Y., Hyland, M. F., & An, S. (2022). Private autonomous vehicles and their impacts on near-activity location travel patterns: Integrated mode choice and parking assignment model. Transportation Research Record, 2676(7), 1–20. https://doi.org/10.1177/03611981221077982
- Bansal, P., & Kockelman, K. M. (2018). Are we ready to embrace connected and self-driving vehicles? A case study of Texans. Transportation, 45(2), 641–675. https://doi.org/10.1007/s11116-016-9745-z
- Bansal, P., Kockelman, K. M., & Singh, A. (2016). Assessing public opinions of and interest in new vehicle technologies: An Austin perspective. Transportation Research. Part C, Emerging Technologies, 67, 1–14. https://doi.org/10.1016/j.trc.2016.01.019
- Bin-Nun, A. Y., & Binamira, I. (2020). A framework for the impact of highly automated vehicles with limited operational design domains. Transportation Research Part A: Policy and Practice, 139, 174–188. https://doi.org/10.1016/j.tra.2020.06.024
- Bischoff, J., Maciejewski, M., Schlenther, T., & Nagel, K. (2019). Autonomous vehicles and their impact on parking search. IEEE Intelligent Transportation Systems Magazine, 11(4), 19–27. https://doi.org/10.1109/MITS.2018.2876566
- Botello, B., Buehler, R., Hankey, S., Mondschein, A., & Jiang, Z. (2019). Planning for walking and cycling in an autonomous-vehicle future. Transportation Research Interdisciplinary Perspectives, Vol 1, 100012. https://doi.org/10.1016/j.trip.2019.100012
- Bridgelall, R., & Stubbing, E. (2021). Forecasting the effects of autonomous vehicles on land use. Technological Forecasting and Social Change, Vol 163, 120444. https://doi.org/10.1016/j.techfore.2020.120444
- Carrese, S., Nigro, M., Patella, S. M., & Toniolo, E. (2019). A preliminary study of the potential impact of autonomous vehicles on residential location in Rome. Research in Transportation Economics, 75, 55–61. https://doi.org/10.1016/j.retrec.2019.02.005
- Carroll, S. J., Turrell, G., Dale, M. J., & Daniel, M. (2021). Residential location, commute distance, and body size: Cross-sectional observational study of state and territory capital cities in Australia. Journal of Transport & Health, Vol 22, 101122. https://doi.org/10.1016/j.jth.2021.101122
- Chapin, T., Stevens, L., Crute, J., Crandall, J., Rokyta, A., & Washington, A. (2016). Envisioning Florida's future transportation and land use in an automated vehicle world. Florida Department of Transportation. Final Report.
- Childress, S., Nichols, B., Charlton, B., & Coe, S. (2015). Using an activity-based model to explore the potential impacts of automated vehicles. Transportation Research Record: Journal of the Transportation Research Board, 2493(1), 99–106. https://doi.org/10.3141/2493-11
- Cohen, T., & Cavoli, C. (2018). Automated vehicles: Exploring possible consequences of government (non)intervention for congestion and accessibility. Transport Reviews, 39(1), 129–151. https://doi.org/10.1080/01441647.2018.1524401
- Cordera, R., Nogués, S., González-González, E., & Moura, J. L. (2021). Modeling the impacts of autonomous vehicles on land use using a LUTI model. Sustainability, 13(4), 1608. https://doi.org/10.3390/su13041608
- Dianin, A., Ravazzoli, E., & Hauger, G. (2021). Implications of autonomous vehicles for accessibility and transport equity: A framework based on literature. Sustainability, 13(8), 4448. https://doi.org/10.3390/su13084448
- Duarte, F., & Ratti, C. (2018). The impact of autonomous vehicles on cities: A review. Journal of Urban Technology, 25(4), 3–18. https://doi.org/10.1080/10630732.2018.1493883
- Emberger, G., & Pfaffenbichler, P. (2020). A quantitative analysis of potential impacts of automated vehicles in Austria using a dynamic integrated land use and transport interaction model. Transport Policy, 98, 57–67. https://doi.org/10.1016/j.tranpol.2020.06.014
- Ewing, R., & Cervero, R. (2010). Travel and the built environment: A meta-analysis. Journal of the American Planning Association, 76(3), 265–294. https://doi.org/10.1080/01944361003766766
- Fagnant, D. J., & Kockelman, K. M. (2014). The travel and environmental implications of shared autonomous vehicles, using agent-based model scenarios. Transportation Research Part C: Emerging Technologies, 40, 1–13. https://doi.org/10.1016/j.trc.2013.12.001
- Faisal, A., Yigitcanlar, T., Kamruzzaman, M., & Currie, G. (2019). Understanding autonomous vehicles: A systematic literature review on capability, impact, planning and policy. Journal of Transport and Land Use, 12(1), 45–72. https://doi.org/10.5198/jtlu.2019.1405
- Fayyaz, M., González-González, E., & Nogués, S. (2022). Autonomous mobility: A potential opportunity to reclaim public spaces for people. Sustainability, 14(3), 1568. https://doi.org/10.3390/su14031568
- Fox, S. J. (2016). Planning for density in a driverless World.pdf. Georgetown University Law Center.
- Fraedrich, E., Heinrichs, D., Bahamonde-Birke, F. J., & Cyganski, R. (2019). Autonomous driving, the built environment and policy implications. Transportation Research Part A: Policy and Practice, 122, 162–172. https://doi.org/10.1016/j.tra.2018.02.018
- Frank, L. D., Sallis, J. F., Saelens, B. E., Leary, L., Cain, K., Conway, T. L., & Hess, P. M. (2010). The development of a walkability index: Application to the neighborhood quality of life study. British Journal of Sports Medicine, 44(13), 924–933. https://doi.org/10.1136/bjsm.2009.058701
- Gandia, R. M., Antonialli, F., Cavazza, B. H., Neto, A. M., Lima, D. A. D., Sugano, J. Y., Nicolai, I., & Zambalde, A. L. (2019). Autonomous vehicles: Scientometric and bibliometric review. Transport Reviews, 39(1), 9–28. https://doi.org/10.1080/01441647.2018.1518937
- Gehl, J. (2010). Cities for people. Island Press.
- Gelauff, G., Ossokina, I., & Teulings, C. (2019). Spatial and welfare effects of automated driving: Will cities grow, decline or both? Transportation Research Part A: Policy and Practice, 121, 277–294. https://doi.org/10.1016/j.tra.2019.01.013
- Golbabaei, F., Yigitcanlar, T., & Bunker, J. (2021). The role of shared autonomous vehicle systems in delivering smart urban mobility: A systematic review of the literature. International Journal of Sustainable TransportaTION, 15(10), 731–748. https://doi.org/10.1080/15568318.2020.1798571
- Gonzalez-Gonzalez, E., Nogues, S., & Stead, D. (2019). Automated vehicles and the city of tomorrow: A backcasting approach. CITIES, 94, 153–160. https://doi.org/10.1016/j.cities.2019.05.034
- Gruel, W., & Stanford, J. M. (2016). Assessing the long-term effects of autonomous vehicles: A speculative approach. Transportation Research Procedia, 13, 18–29. https://doi.org/10.1016/j.trpro.2016.05.003
- Guan, J., Zhang, S., D’Ambrosio, L. A., Zhang, K., & Coughlin, J. F. (2021). Potential impacts of autonomous vehicles on urban sprawl: A comparison of Chinese and us car-oriented adults. Sustainability (Switzerland), 13(14), 1–16. https://doi.org/10.3390/su13147632
- Hawkins, J., & Nurul Habib, K. (2018). Integrated models of land use and transportation for the autonomous vehicle revolution. Transport Reviews, 39(1), 66–83. https://doi.org/10.1080/01441647.2018.1449033
- Heinrichs, D.. (2016). Autonomous Driving and Urban Land Use. In: Maurer, M., Gerdes, J., Lenz, B., Winner, H. (eds) Autonomous Driving. (Vol. 1, pp. 213–231). Springer, Berlin, Heidelberg. https://doi.org/10.1007/978-3-662-48847-8_11
- Hiramatsu, T. (2022). Impact of autonomous vehicles on the choice of residential locality. Transportation Planning and Technology, 45(3), 268–288. https://doi.org/10.1080/03081060.2022.2105339
- Jing, P., Hu, H., Zhan, F., Chen, Y., & Shi, Y. (2020a). Agent-Based simulation of autonomous vehicles: A systematic literature review. IEEE Access, 8, 79089–79103. https://doi.org/10.1109/ACCESS.2020.2990295
- Jing, P., Xu, G., Chen, Y., Shi, Y., & Zhan, F. (2020b). The determinants behind the acceptance of autonomous vehicles: A systematic review. Sustainability (Basel, Switzerland), 12(5), 1719. https://doi.org/10.3390/su12051719
- Kang, D., Hu, F., & Levin, M. W. (2022). Impact of automated vehicles on traffic assignment, mode split, and parking behavior. Transportation Research Part D: Transport and Environment, 104, 103200. https://doi.org/10.1016/j.trd.2022.103200
- Kang, D., & Levin, M. W. (2021). Maximum-stability dispatch policy for shared autonomous vehicles. Transportation Research Part B: Methodological, 148, 132–151. https://doi.org/10.1016/j.trb.2021.04.011
- Kang, N. Y., & Kim, Y. (2019). Potential of urban land Use by autonomous vehicles: Analyzing land Use potential in Seoul capital area of Korea. IEEE Access, 7, 101915–101927. https://doi.org/10.1109/ACCESS.2019.2929777
- Kellett, J., Barreto, R., Hengel, A. V. D., & Vogiatzis, N. (2019). How might autonomous vehicles impact the city? The case of commuting to Central Adelaide. Urban Policy and Research, 37(4), 442–457. https://doi.org/10.1080/08111146.2019.1674646
- Keszey, T. (2020). Behavioural intention to use autonomous vehicles: Systematic review and empirical extension. Transportation Research. Part C, Emerging Technologies, 119, 102732. https://doi.org/10.1016/j.trc.2020.102732
- Kim, S. H., Mokhtarian, P. L., & Circella, G. (2020). Will autonomous vehicles change residential location and vehicle ownership? Glimpses from Georgia. Transportation Research Part D: Transport and Environment, 82. https://doi.org/10.1016/j.trd.2020.102291
- Kondor, D., Zhang, H. M., Tachet, R., Santi, P., & Ratti, C. (2019). Estimating savings in parking demand using shared vehicles for home work commuting. IEEE Transactions on Intelligent Transportation Systems, 20(8), 2903–2912. https://doi.org/10.1109/TITS.2018.2869085
- Kong, Y., Le Vine, S., & Liu, X. (2018). Capacity impacts and optimal geometry of automated cars' surface parking facilities. Journal of Advanced Transportation, 2018, 1–13. https://doi.org/10.1155/2018/6908717
- Kumakoshi, Y., Hanabusa, H., & Oguchi, T. (2021). Impacts of shared autonomous vehicles: Tradeoff between parking demand reduction and congestion increase. Transportation Research Interdisciplinary Perspectives, 12, 100482. https://doi.org/10.1016/j.trip.2021.100482
- Kyung-Hwan, K., Dong-Hiung, Y., Yong-Seok, K., & Dong-Han, K. (2015). An analysis of expected effects of the autonomous vehicles on transport and land use in Korea.
- Larson, W., & Zhao, W. H. (2020). Self-driving cars and the city: Effects on sprawl, energy consumption, and housing affordability. Regional Science and Urban Economics, 81, 103484. https://doi.org/10.1016/j.regsciurbeco.2019.103484
- Lawrence, D. L., & Low, S. M. (1990). The built environment and spatial form. Annual Review of Anthropology, 19(1), 453–505. https://doi.org/10.1146/annurev.an.19.100190.002321
- Lee, S., Jang, K. M., Kang, N., Kim, J., Oh, M., & Kim, Y. (2022). Redesigning urban elements and structures considering autonomous vehicles: Preparing design strategies for wide implementation in cities. CITIES, 123, 1–11. https://doi.org/10.1016/j.cities.2022.103595
- Legacy, C., Ashmore, D., Scheurer, J., Stone, J., & Curtis, C. (2018). Planning the driverless city. Transport Reviews, 39(1), 84–102. https://doi.org/10.1080/01441647.2018.1466835
- Legêne, M. F., Auping, W. L., Correia, G. H. D. A., & Van Arem, B. (2020). Spatial impact of automated driving in urban areas. Journal of Simulation, 14(4), 295–303. https://doi.org/10.1080/17477778.2020.1806747
- Li, J., Rombaut, E., & Vanhaverbeke, L. (2021). A systematic review of agent-based models for autonomous vehicles in urban mobility and logistics: Possibilities for integrated simulation models. Computers, Environment and Urban Systems, 89, 101686. https://doi.org/10.1016/j.compenvurbsys.2021.101686
- Liu, P., Xu, S. X., Ong, G. P., Tian, Q., & Ma, S. (2021). Effect of autonomous vehicles on travel and urban characteristics. Transportation Research Part B: Methodological, 153, 128–148. https://doi.org/10.1016/j.trb.2021.08.014
- Liu, Z. Y., Li, R. M., & Dai, J. C. (2022). Effects and feasibility of shared mobility with shared autonomous vehicles: An investigation based on data-driven modeling approach. Transportation Research Part A: Policy and Practice, 156, 206–226. https://doi.org/10.1016/j.tra.2022.01.001
- Llorca, C., Moreno, A., Ammar, G., & Moeckel, R. (2022). Impact of autonomous vehicles on household relocation: An agent-based simulation. Cities, 126, 103692. https://doi.org/10.1016/j.cities.2022.103692
- Luo, L., Troncoso, G., Takami, K., & Harata, N. (2019). Evaluating the impact of autonomous vehicles on accessibility using agent-based simulation — A case study of Gunma Prefecture. Journal of Japan Society of Civil Engineers, 7(1), 100–111. https://doi.org/10.2208/journalofjsce.7.1_100
- Magoroh, M. (1963). THE SECOND CYBERNETICS: Deviation-amplifying mutual causal processes. American Scientist, 51(2), 164–179. http://www.jstor.org/stable/27838689
- Manivasakan, H., Kalra, R., O'Hern, S., Fang, Y., Xi, Y., & Zheng, N. (2021). Infrastructure requirement for autonomous vehicle integration for future urban and suburban roads – current practice and a case study of Melbourne, Australia. Transportation Research Part A: Policy and Practice, 152, 36–53. https://doi.org/10.1016/j.tra.2021.07.012
- Meyer, J., Becker, H., Bösch, P. M., & Axhausen, K. W. (2017). Autonomous vehicles: The next jump in accessibilities? Research in Transportation Economics, 62, 80–91. https://doi.org/10.1016/j.retrec.2017.03.005
- Milakis, D., Kroesen, M., & Van Wee, B. (2018). Implications of automated vehicles for accessibility and location choices: Evidence from an expert-based experiment. Journal of Transport Geography, 68, 142–148. https://doi.org/10.1016/j.jtrangeo.2018.03.010
- Milakis, D., Van Arem, B., & Van Wee, B. (2017). Policy and society related implications of automated driving: A review of literature and directions for future research. Journal of Intelligent Transportation Systems, 21(4), 324–348. https://doi.org/10.1080/15472450.2017.1291351
- Millard-Ball, A. (2019). The autonomous vehicle parking problem. Transport Policy, 75, 99–108. https://doi.org/10.1016/j.tranpol.2019.01.003
- Miller, J. S., & Kang, D. (2019). Ways to consider driverless vehicles in Virginia long range travel demand models.
- Moher, D., Liberati, A., Tetzlaff, J., & Altman, D. G. (2009). Reprint—preferred reporting items for systematic reviews and meta-analyses: The PRISMA statement. Physical Therapy, 89(9), 873–880. https://doi.org/10.1093/ptj/89.9.873
- Moore, M. A., Lavieri, P. S., Dias, F. F., & Bhat, C. R. (2020). On investigating the potential effects of private autonomous vehicle use on home/work relocations and commute times. Transportation Research Part C. Emerging Technologies, 110, 166–185. https://doi.org/10.1016/j.trc.2019.11.013
- Mueller, N., Rojas-Rueda, D., Khreis, H., Cirach, M., Andrés, D., Ballester, J., Bartoll, X., Daher, C., Deluca, A., Echave, C., Milà, C., Márquez, S., Palou, J., Pérez, K., Tonne, C., Stevenson, M., Rueda, S., & Nieuwenhuijsen, M. (2020). Changing the urban design of cities for health: The superblock model. Environment International, 134, 105132. https://doi.org/10.1016/j.envint.2019.105132
- Munn, Z., Peters, M. D. J., Stern, C., Tufanaru, C., Mcarthur, A., & Aromataris, E. (2018). Systematic review or scoping review? Guidance for authors when choosing between a systematic or scoping review approach. BMC Medical Research Methodology, 18(1), 143. https://doi.org/10.1186/s12874-018-0611-x
- Nadafianshahamabadi, R., Tayarani, M., & Rowangould, G. (2021). A closer look at urban development under the emergence of autonomous vehicles: Traffic, land use and air quality impacts. Journal of Transport Geography, 94, 103113. https://doi.org/10.1016/j.jtrangeo.2021.103113
- Nahmias-Biran, B.-H., Oke, J. B., Kumar, N., Lima Azevedo, C., & Ben-Akiva, M. (2020). Evaluating the impacts of shared automated mobility on-demand services: An activity-based accessibility approach. Transportation, 48(4), 1613–1638. https://doi.org/10.1007/s11116-020-10106-y
- Narayanan, S., Chaniotakis, E., & Antoniou, C. (2020). Shared autonomous vehicle services: A comprehensive review. Transportation Research. Part C, Emerging Technologies, 111, 255–293. https://doi.org/10.1016/j.trc.2019.12.008
- Nodjomian, A. T., & Kockelman, K. (2019). How does the built environment affect interest in the ownership and use of self-driving vehicles? Journal of Transport Geography, 78, 115–134. https://doi.org/10.1016/j.jtrangeo.2019.05.016
- Nogues, S., Gonzalez-Gonzalez, E., & Cordera, R. (2020). New urban planning challenges under emerging autonomous mobility: Evaluating backcasting scenarios and policies through an expert survey. Land Use Policy, 95, 104652. https://doi.org/10.1016/j.landusepol.2020.104652
- Norman, J., Maclean, H. L., & Kennedy, C. A. (2006). Comparing high and low residential density: Life-cycle analysis of energy use and greenhouse gas emissions. Journal of Urban Planning and Development, 132(1), 10–21. https://doi.org/10.1061/(ASCE)0733-9488(2006)132:1(10)
- Nourinejad, M., Bahrami, S., & Roorda, M. J. (2018). Designing parking facilities for autonomous vehicles. Transportation Research Part B: Methodological, 109, 110–127. https://doi.org/10.1016/j.trb.2017.12.017
- Okeke, O. B. (2020). The impacts of shared autonomous vehicles on car parking space. Case Studies on Transport Policy, 8(4), 1307–1318. https://doi.org/10.1016/j.cstp.2020.09.002
- Ostermeijer, F., Koster, H. R. A., & Van Ommeren, J. (2019). Residential parking costs and car ownership: Implications for parking policy and automated vehicles. Regional Science and Urban Economics, 77, 276–288. https://doi.org/10.1016/j.regsciurbeco.2019.05.005
- Othman, K. (2021). Impact of autonomous vehicles on the physical infrastructure: Changes and challenges. Designs, 5(3), 40. https://doi.org/10.3390/designs5030040
- Overtoom, I., Correia, G., Huang, Y., & Verbraeck, A. (2020). Assessing the impacts of shared autonomous vehicles on congestion and curb use: A traffic simulation study in The Hague, Netherlands. International Journal of Transportation Science and Technology, 9(3), 195–206. https://doi.org/10.1016/j.ijtst.2020.03.009
- Page, M. J., Mckenzie, J. E., Bossuyt, P. M., Boutron, I., Hoffmann, T. C., Mulrow, C. D., … Moher, D. (2021). The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. BMJ, 372(71). https://doi.org/10.1136/bmj.n71
- Peters, M. D. J., Godfrey, C. M., Khalil, H., Mcinerney, P., Parker, D., & Soares, C. B. (2015). Guidance for conducting systematic scoping reviews. International Journal of Evidence-Based Healthcare, 13(3), 141–146. https://doi.org/10.1097/XEB.0000000000000050
- Rafael, S., Fernandes, P., Lopes, D., Rebelo, M., Bandeira, J., Macedo, E., Rodrigues, M., Coelho, M. C., Borrego, C., & Miranda, A. I. (2022). How can the built environment affect the impact of autonomous vehicles’ operational behaviour on air quality? Journal of Environmental Management, 315, 115154–115154. https://doi.org/10.1016/j.jenvman.2022.115154
- Riggs, W., Appleyard, B., & Johnson, M. (2020). A design framework for livable streets in the era of autonomous vehicles. Urban, Planning and Transport Research, 8(1), 125–137. https://doi.org/10.1080/21650020.2020.1749123
- SAE. (2021). Taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles [Online]. Accessed June 22, 2022 2022, from https://www.sae.org/standards/content/j3016_202104/
- Sallis, J. F., Cerin, E., Conway, T. L., Adams, M. A., Frank, L. D., Pratt, M., Salvo, D., Schipperijn, J., Smith, G., Cain, K. L., Davey, R., Kerr, J., Lai, P.-C., Mitáš, J., Reis, R., Sarmiento, O. L., Schofield, G., Troelsen, J., Van Dyck, D., … Owen, N. (2016). Physical activity in relation to urban environments in 14 cities worldwide: A cross-sectional study. The Lancet, 387(10034), 2207–2217. https://doi.org/10.1016/S0140-6736(15)01284-2
- Shatanawi, M., & Mészáros, F. (2022). Implications of the emergence of autonomous vehicles and shared autonomous vehicles: A Budapest perspective. Sustainability (Switzerland), 14(17). https://doi.org/10.3390/su141710952
- Shatu, F., & Kamruzzaman, M. (2022). Planning for active transport in driverless cities: A conceptual framework and research agenda. Journal of Transport & Health, 25, 101364. https://doi.org/10.1016/j.jth.2022.101364
- Silva, D., Földes, D., & Csiszár, C. (2021). Autonomous vehicle use and urban space transformation: A scenario building and analysing method. Sustainability (Switzerland), 13(6). https://doi.org/10.3390/su13063008
- Silva, O., Cordera, R., Gonzalez-Gonzalez, E., & Nogues, S. (2022). Environmental impacts of autonomous vehicles: A review of the scientific literature. Science of The Total Environment, 830, 154615. https://doi.org/10.1016/j.scitotenv.2022.154615
- Simons, R. A., Feltman, D. C., & Malkin, A. A. (2018). When would dr iverless vehicles make downtown parking unsustainable, and where would the driver less car fleet rest during the day? Journal of Sustainable Real Estate, 10(1), 3–32. https://doi.org/10.1080/10835547.2018.12091910
- Soteropoulos, A., Berger, M., & Mitteregger, M. (2021). Compatibility of automated vehicles in street spaces: Considerations for a sustainable implementation. Sustainability, 13(5), 2732. https://doi.org/10.3390/su13052732
- Stead, D., & Vaddadi, B. (2019). Automated vehicles and how they may affect urban form: A review of recent scenario studies. Cities, 92, 125–133. https://doi.org/10.1016/j.cities.2019.03.020
- Steiner, R. L. (1994). Residential density and travel patterns: Review of the literature. Transportation Research Record, 1466, 37–43. Avalilable at: http://onlinepubs.trb.org/Onlinepubs/trr/1994/1466/1466-006.pdf
- Sterman, J. (2000). Business dynamics, system thinking and modeling for a complex World. http://lst-iiep.iiep-unesco.org/cgi-bin/wwwi32.exe/[in = epidoc1.in]/?t2000 = 013598/(100), 19
- Szimba, E., & Hartmann, M. (2020). Assessing travel time savings and user benefits of automated driving – A case study for a commuting relation. Transport Policy, 98, 229–237. https://doi.org/10.1016/j.tranpol.2020.03.007
- Tao, T., & Cao, J. (2022). Examining motivations for owning autonomous vehicles: Implications for land use and transportation. Journal of Transport Geography, 102, 103361. https://doi.org/10.1016/j.jtrangeo.2022.103361
- Thakur, P., Kinghorn, R., & Grace, R. (2016). Urban form and function in the autonomous era. Australasian Transport Research Forum (ATRF), 38th, 2016, Melbourne, Victoria, Australia. Melbourne, Australia.
- Truong, L. T., De Gruyter, C., Currie, G., & Delbosc, A. (2017). Estimating the trip generation impacts of autonomous vehicles on car travel in Victoria, Australia. Transportation, 44(6), 1279–1292. https://doi.org/10.1007/s11116-017-9802-2
- Twinam, T. (2017). Danger zone: Land use and the geography of neighborhood crime. Journal of Urban Economics, 100, 104–119. https://doi.org/10.1016/j.jue.2017.05.006
- Wang, K., & Zhang, W. (2021). The role of urban form in the performance of shared automated vehicles. Transportation Research Part D: Transport and Environment, 93, 102744. https://doi.org/10.1016/j.trd.2021.102744
- Wellik, T., & Kockelman, K. (2020). Anticipating land-use impacts of self-driving vehicles in the Austin, Texas, region. Journal of Transport and Land Use, 13(1), 185–205. https://doi.org/10.5198/jtlu.2020.1717
- Winter, K., Cats, O., Martens, K., & Van Arem, B. (2021). Parking space for shared automated vehicles: How less can be more. Transportation Research Part A: Policy and Practice, 143, 61–77. https://doi.org/10.1016/j.tra.2020.11.008
- Xia, B., Wu, J., Wang, J., Fang, Y., Shen, H., & Shen, J. (2021). Sustainable renewal methods of urban public parking spaces under the scenario of shared autonomous vehicles (Sav): A review and a proposal. Sustainability (Switzerland), 13(7), 1–21. https://doi.org/10.3390/su13073629
- Yigitcanlar, T., Wilson, M., & Kamruzzaman, M. (2019). Disruptive impacts of automated driving systems on the built environment and land Use: An urban planner’s perspective. Journal of Open Innovation: Technology, Market, and Complexity, 5(2), 24. https://doi.org/10.3390/joitmc5020024
- Zakharenko, R. (2016). Self-driving cars will change cities. Regional Science and Urban economics, 61, 26–37. https://doi.org/10.1016/j.regsciurbeco.2016.09.003
- Zhang, W., & Guhathakurta, S. (2017). Parking spaces in the Age of shared autonomous vehicles: How much parking will we need and where? Transportation Research Record: Journal of the Transportation Research Board, 2651(1), 80–91. https://doi.org/10.3141/2651-09
- Zhang, W., Guhathakurta, S., Fang, J., & Zhang, G. (2015). Exploring the impact of shared autonomous vehicles on urban parking demand: An agent-based simulation approach. Sustainable Cities and Society, 19, 34–45. https://doi.org/10.1016/j.scs.2015.07.006
- Zhang, W., Guhathakurta, S., & Khalil, E. B. (2018). The impact of private autonomous vehicles on vehicle ownership and unoccupied VMT generation. Transportation Research Part C: Emerging Technologies, 90, 156–165. https://doi.org/10.1016/j.trc.2018.03.005
- Zhang, W., & Wang, K. (2020). Parking futures: Shared automated vehicles and parking demand reduction trajectories in Atlanta. Land Use Policy, 91, 1–12. https://doi.org/10.1016/j.landusepol.2019.04.024
- Zhang, W. W., & Guhathakurta, S. (2021). Residential location choice in the Era of shared autonomous vehicles. Journal of Planning Education and Research, 41(2), 135–148. https://doi.org/10.1177/0739456X18776062
- Zhong, S., Li, X., Jiang, Y., Cheng, R., & Wang, Z. (2020). Identifying the combined effect of shared autonomous vehicles and congestion pricing on regional job accessibility. Journal of Transport and Land Use, 13(1), 273–297. https://doi.org/10.5198/jtlu.2020.1692
- Zhou, M., Le, D. T., Nguyen-Phuoc, D. Q., Zegras, P. C., & Ferreira, J. J. (2021). Simulating impacts of automated mobility-on-demand on accessibility and residential relocation. Cities, 118, 1–20. https://doi.org/10.1016/j.cities.2021.103345