Abstract
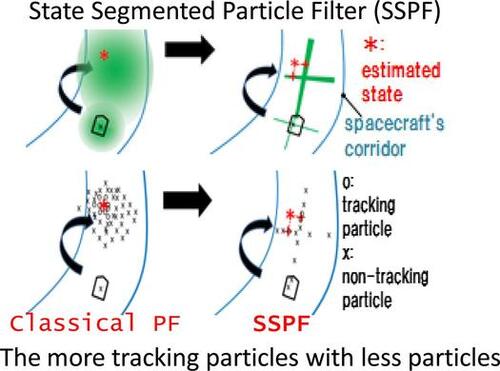
Fault diagnosis permits computational redundancy, which renders a system sustainable and eventually leads to hardware cost reduction. To achieve the posterior distribution computation needed for fault diagnosis along with motion estimation, we suggest a particle filtering (PF)-based state-segmentation approach. Here, both a continuous state vector and fault states are segmented accordingly to allow flexible reasoning for fault diagnosis and motion estimation. For each segmented space, an attempt is made to construct a corresponding posterior distribution independently, resulting in a reduction of the number of particles. Our experimental simulation demonstrates fault diagnosis among billions of fault states. Our state-segmentation approach reduced 98% of particles compared with the ordinal PF approach.
Graphical Abstract