

Abstract
Designing a sit-to-stand (STS) assistive system that mimics the normal transfer is important for improving the quality of life for elderly and mobility impaired people while reducing the burden on the caregivers. This paper presents a robotic-based STS assisting system that can provide assistance at the shoulder and the buttock. The minimum jerk criterion is used to model the natural STS motion. Anthropometry and characteristics of the natural STS motion are used to increase the simplicity and applicability of the STS motion model. This model can generate the shoulder and hip trajectories during STS. This enables the system to provide assistance either at the upper trunk or at the upper trunk and the hip simultaneously without inducing abnormal motion kinematics. The assisting system is used to assist subjects with different heights using the trajectories generated by the proposed motion model. In addition, the proposed trajectory is compared to the one that is resulted from a commercial lifter. The results show that the proposed method can accurately replicate the natural STS motion and results in a lower interaction force. Moreover, the subjects are more satisfied when they are assisted using the proposed method as indicated by the results of the post-experiment questionnaire.
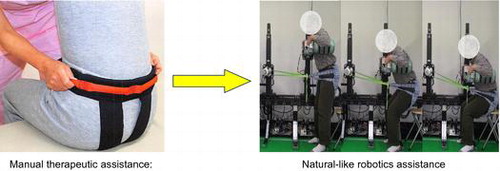
Graphical Abstract
Acknowledgements
The first author acknowledges the Mission Department of the Ministry of Higher Education in Egypt for granting him scholarships to carry out his graduate studies in Egypt-Japan University of Science and Technology and support his research work. The feedback and suggestions of Dr. Shinichi Kosugi the Medical Director of Nara Prefectural Seiwa Medical Center are highly appreciated.
Notes
No potential conflict of interest was reported by the authors.