

ABSTRACT
We present a neuronal architecture to control a compliant robotic model of the human vertebral column for postural balance. The robotic structure is designed using the principle of tensegrity that ensures to be lightweight, auto-replicative with multi-degrees of freedom, flexible and also robust to perturbations. We model the central pattern generators of the spinal cords with a network of nonlinear Kuramoto oscillators coupled internally and externally to the structure and error-driven by a proportional derivative (PD) controller using an accelerometer for feedback. This coupling between the two controllers is original and we show it serves to generate controlled rhythmical patterns. We observe for certain coupling parameters some intervals of synchronization and of resonance of the neural units to the tensile structure to permit smooth control and balance. We show that the top-down PD control of the oscillators flexibly absorbs external shocks proportionally to the perturbation and converges to steady state behaviors. We discuss then about our neural architecture to model motor synergies for compliance control and also about tensegrity structures for soft robotics. The 3D printed model is provided as well as a movie at the address https://sites.google.com/site/embodiedai/current-research/tensegrityrobots.
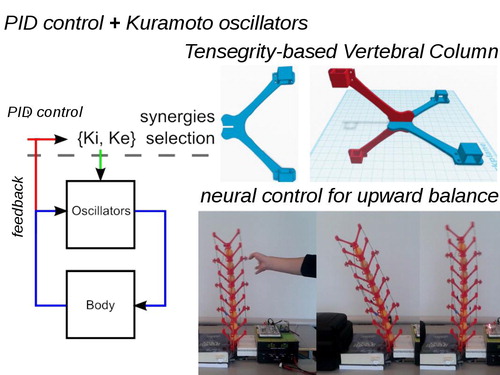
GRAPHICAL ABSTRACT
Acknowledgments
We would like to dedicate this manuscript in memory of Stephane Garnier, our collaborator at ENSEA, who started to work with us on this project and passed away. We would like to thank Ihor Kuras for his help on this project.
Disclosure statement
No potential conflict of interest was reported by the authors.
Additional information
Funding
Notes on contributors
Artem Melnyk
Artem Melnyk was born in Donetsk, Ukraine. He received the Specialist Diploma in Electromechanics from the Donetsk National Technical University in 2003. He obtained the Ph.D. degree from the Cergy-Pontoise University (Prof. P. Henaff). His research was focused on human-robot physical interaction and tactile perception for the robotic arm. Actually, Artem works as a research engineer at INRIA, in the Hephaistos Team. His topics of interest concern the virtual or immersive reality and motion tracking for gait rehabilitation, the biologically inspired robot control and tensegrity robots.
Alexandre Pitti
Alexandre Pitti is Maître de Conferences (associate professor) at the ETIS lab of Cergy-Pontoise University, CNRS, Cergy-Pontoise, France. He did his PhD at the University of Tokyo (Prof Kuniyoshi) and worked as JST researcher in the ERATO project of prof Minoru Asada. His research topics are in embodied AI and NeuroRobotics; models of motor synergies and bio-inspired control, models of tactile sensors and multimodal integration for reaching and body representation in robots. He holds the CNRS-UCP chair of excellence on Cognitive Robotics.