

ABSTRACT
In recent years, powered ankle-foot prostheses are developed to restore human ankle behaviour. Compared with common passive ankle prostheses, a powered ankle-foot prosthesis can provide amputees with better performance on walking gait by providing additional energy. However, the electrical peak power of powered ankle-foot prostheses at high speed is still a big challenge for the current actuation system. While most researchers focus on the energy consumption on one walking speed, we investigate the influences of several variable mechanical parameters to reduce electrical peak power during different locomotion speeds. Then we apply this concept to current ankle-foot models. It's found that the variable mechanical parameters can significantly reduce the demand of electrical peak power at different speeds. Meanwhile, the reduction of the electrical peak power does not lead to a large increment of the energy consumption. The results also show that every variable mechanical parameter has a different influence on the peak power and energy consumption of the ankle-foot prosthesis. It means the most effective and sensitive variable mechanical parameter need to be found for a specific ankle prosthesis system.
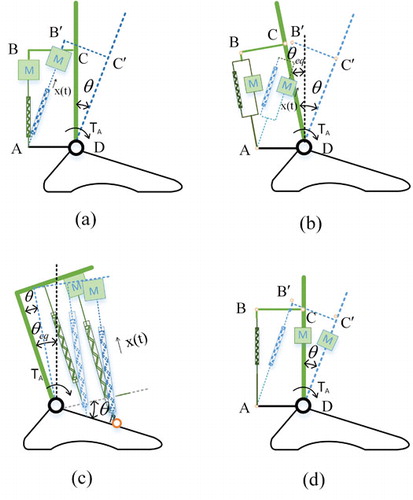
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the authors.
Additional information
Funding
Notes on contributors
Dianbiao Dong
Dianbiao Dong received the BS degree in mechanical engineering from Northwestern Polytechnical University in 2013. He worked as a PhD student at Northwestern Polytechnical University since 2013. He is working in the Department of Mechanical Engineering (MECH), Vrije Universiteit Brussel as a joint Ph.D. student since 2016. His research interests include ankle-foot prosthetics and exoskeleton.
Bryan Convens
Bryan Convens currently works in the Department of Mechanical Engineering (MECH), Vrije Universiteit Brussel as a PhD student. Bryan does research in Computer Engineering, Control Systems Engineering and Mechanical Engineering.
Yuanxi Sun
Yuanxi Sun received his B.S. degree in mechanical engineering from Northwestern Polytechnical University, Xi’an, Shaanxi, P.R. China, in 2011. He is currently pursuing the PhD degree in Northwestern Polytechnical University. His research interests include prosthetic knee joint, and optimization of bar.
Wenjie Ge
Wenjie Ge received the BS degree in mechanical design and manufacturing from XI’AN University of Technology. He received the MS and the PhD degree in Mechanical Engineering from Northwestern Polytechnical University. He is a professor in Northwestern Polytechnical University. His research interest lies in mechanical theory and mechanism, mechanical dynamics, robotic mechanism and bionic robotics.
Pierre Cherelle
Pierre Cherelle was born in Braine l’Alleud (Belgium) in 1984. He received the master of science degree in experimental physics from Vrije Universiteit Brussel in 2007. Currently, he's researcher and teaching assistant at the Vrije Universiteit Brussel. His research is in the field of rehabilitation robotics. Within the Robotics & Multibody Mechanics Research Group, he is working on the design, construction and control of passive and powered transtibial prosthetic devices.
Bram Vanderborght
Bram Vanderborght received his PhD in 2007. The focus of his research was the use of adaptable compliance of pneumatic artificial muscles in the dynamically balanced biped Lucy. In 2006 he performed research on the humanoids robot HRP-2 in AIST, Tsukuba (Japan). From October 2007–April 2010 he worked as a post-doc researcher at IIT (Italy). Since October 2009, he is appointed as professor at the VUB. He is a member of the Young Academy of the Royal Flemish Academy of Belgium for Science and the Arts. In 2013 he received an ERC Starting Grant. His research interests include cognitive and physical human–robot interaction with core technology using variable impedance actuators.