

ABSTRACT
Ultrasonography (USG) is a common medical examination that can be performed remotely and that highly benefits from robotics. In this paper, we evaluate a novel interface for a telediagnosis system that features haptic feedback and a 2D/3D visualization of the remote site. A Virtual Environment (VE) representing the patient site was used for the validation to stress the interaction capabilities of the interface and to decouple expert's interface performance from the effects of the whole teleoperation loop of a telediagnosis system. The interface evaluation measures include the accuracy that doctors achieve when positioning the interface's end-effector in the VE and the success of experts to perform tasks related to cardiac USG that require force feedback. Twelve experienced sonographers performed four experiments in which visualization modality and VE navigation technique varied. Given the limitations of an evaluation in simulated settings, both quantitative results and experts' opinions suggest that the interface is suitable for integration in tele-USG systems. After a positive evaluation of latencies and rendered forces, we show how navigation condition influences the accuracy of the end-effector positioning as well as the covered distance and the elapsed time to accomplish the tasks. Similarly, we highlight the effect of visualization on accuracy.
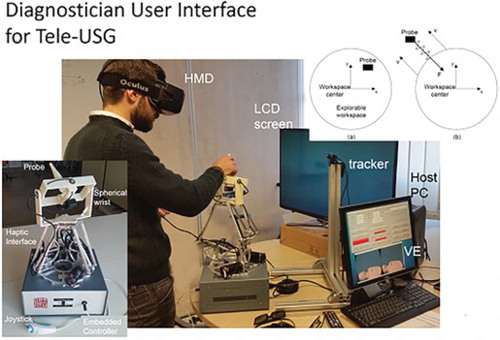
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the authors.
ORCID
Alessandro Filippeschi http://orcid.org/0000-0001-6078-6429
Juan Manuel Jacinto Villegas http://orcid.org/0000-0002-0964-4844
Additional information
Funding
Notes on contributors
Alessandro Filippeschi
Alessandro Filippeschi is Assistant Professor at PERCRO, Scuola Superiore Sant'Anna. Alessandro received a PhD in Perceptual Robotics at Scuola Superiore Sant'Anna in 2012. His research activity deals with human performance capture and analysis and the design of robotic haptic interfaces for human robot interaction.
Filippo Brizzi
Filippo Brizzi is software engineer at Blue Vision Labs (UK). He received the Computer Science MSc degree jointly from University of Pisa and Scuola Superiore Sant'Anna, Italy, where he received a Ph.D. in perceptual robotics at PERCRO laboratory. His research interests include augmented reality, haptics and software architecture for robotics systems.
Emanuele Ruffaldi
Emanuele Ruffaldi is senior software manager at MMI S.p.A. (IT). Formerly he was Assistant Professor at Scuola Superiore Sant'Anna, Italy. His research interests were in the field of virtual environments and machine learning for HRI.
Juan Manuel Jacinto Villegas
Juan Manuel Jacinto Villegas was recently elected to occupy a CONACYT Professorship position as Research Professor at the Autonomous University of the State of Mexico (UAEM),Toluca, Mexicois. He was research fellow at PERCRO Lab. of Scuola Superiore Sant'Anna where has received the PhD with summa cum laude in 2017. His background is in Electronics, PCB design, Automation, Mechatronics, Robotics, teleoperation and Haptic control.
Lorenzo Landolfi
Lorenzo Landolfi is PhD student at Scuola Superiore Sant'Anna, Italy. He hold a MS degree in Computer Science and his main research interests deal with machine learning and human–robot interaction.
Carlo Alberto Avizzano
Carlo Alberto Avizzano is the coordinator of PERCRO laboratory of Scuola Superiore Sant'Anna, Italy. His research interests include intelligent robot controllers including autonomous robots as well as human interfaces. He has collaborated/coordinated several EU and National projects. He is a member of the IEEE.